
基于交通路錐識(shí)別的車輛安全引導(dǎo)方法
2021-08-16 10:03:56彭陸亞靜張洪昌
科技與創(chuàng)新 2021年15期
彭陸亞靜,張洪昌
(武漢理工大學(xué)汽車工程學(xué)院,湖北 武漢 430070)
1 引言
目前中國(guó)汽車產(chǎn)業(yè)“新三化”的發(fā)展已成為趨勢(shì),車輛智能化越來越受到業(yè)界的重視,其中有關(guān)道路目標(biāo)的識(shí)別也日益豐富,主體重心都放在車輛識(shí)別和行人識(shí)別上。對(duì)于施工路段等特殊工況,具備自動(dòng)駕駛功能的車輛多采取保守的方式,將行駛交給駕駛員控制,但由于駕駛員注意力分散或行駛方向上有其他車輛等障礙物遮擋,容易造成駕駛員對(duì)前方施工路段的忽視,從而干擾正常行駛。因此,在施工路段等特殊工況下的智能化研究具有重要意義。
交通路錐的識(shí)別并生成安全區(qū)域,是對(duì)車輛智能化的重要補(bǔ)充。特斯拉于2019年公開更新的輔助駕駛系統(tǒng)中,其車載攝像頭成功識(shí)別部分交通路錐,并生成相應(yīng)行駛路徑區(qū)域,但目前只是測(cè)試階段,且存在對(duì)交通路錐識(shí)別丟失和對(duì)其他障礙物的誤識(shí)別等問題。但特斯拉表示,有關(guān)交通路錐的識(shí)別和安全區(qū)域劃分仍是重要研究方向。
本文利用的傳感器為激光雷達(dá),其具有分辨率高、抗有源干擾能力強(qiáng)、低空探測(cè)性能好、體積小、質(zhì)量輕等優(yōu)點(diǎn),目前已被廣泛運(yùn)用于目標(biāo)探測(cè)識(shí)別。在自動(dòng)駕駛領(lǐng)域,由于其可以顯著提高自動(dòng)駕駛系統(tǒng)的可靠性,因此被認(rèn)為是L3級(jí)及以上自動(dòng)駕駛必備的傳感器,具有廣闊的發(fā)展前景。
基于以上情況,本文提出了一種基于交通路錐識(shí)別的車輛安全引導(dǎo)方法,用于車輛在交通路錐引導(dǎo)路段的安全區(qū)域劃分和引導(dǎo)路線生成,以補(bǔ)充有關(guān)交通路錐識(shí)別和安全區(qū)域劃分的研究。
2 方法總體設(shè)計(jì)
本發(fā)明提供的基于交通路錐識(shí)別的車輛安全引導(dǎo)方法,其流程如圖1所示,主要由車載激光雷達(dá)、車輛加速度傳感器、圖像顯示器和若干接口電路組成。車載激光雷達(dá)提供原始三維空間坐標(biāo)位置信息,結(jié)合雷達(dá)安裝位置進(jìn)行坐標(biāo)系轉(zhuǎn)換。同時(shí)采集車輛加速度傳感器發(fā)送的車輛各方向加速度信息,共同傳至車輛ECU,利用本方法進(jìn)行適應(yīng)車輛姿態(tài)的坐標(biāo)系轉(zhuǎn)換,從而簡(jiǎn)化后續(xù)計(jì)算的計(jì)算量。再利用本方法對(duì)交通路錐進(jìn)行識(shí)別,將處理后的交通路錐信息傳入圖像顯示器,從而顯示車輛安全區(qū)域和引導(dǎo)路線。
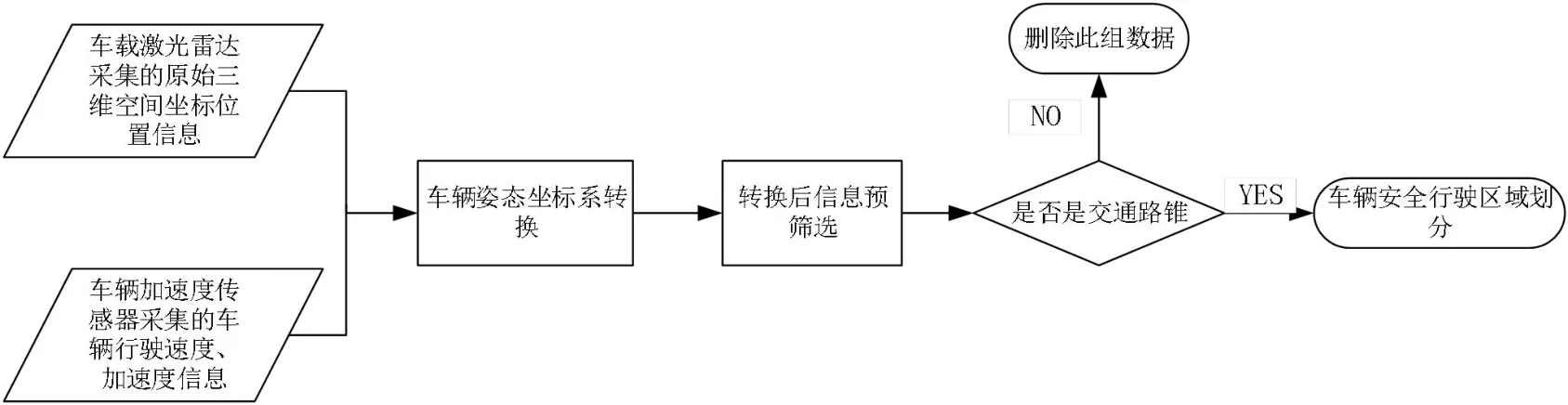
圖1 結(jié)構(gòu)流程圖
車載激光雷達(dá)安裝在車頂,安裝后對(duì)其位置進(jìn)行校對(duì),以獲得其相對(duì)車輛質(zhì)心的角度,將角度信息通過對(duì)應(yīng)的接口電路傳至車輛ECU,將原始三維坐標(biāo)位置轉(zhuǎn)換至車輛質(zhì)心。所述的車輛加速度傳感器安裝在車輛質(zhì)心附近位置,對(duì)其安裝位置進(jìn)行校對(duì),將測(cè)得的車輛各方向加速度信息通過對(duì)應(yīng)的接口電路傳至車輛ECU,將預(yù)處理坐標(biāo)信息進(jìn)行適應(yīng)車輛姿態(tài)的坐標(biāo)系轉(zhuǎn)換。
所述的圖像顯示器由車輛ECU將處理后的車輛安全區(qū)域和引導(dǎo)路線,通過輸出電路將信號(hào)傳入圖像顯示器,用于顯示車輛安全區(qū)域和引導(dǎo)路線。
3 基于交通路錐識(shí)別的車輛引導(dǎo)方法
本發(fā)明基于車載激光雷達(dá)和車輛加速度傳感器的信息,通過對(duì)原始三維空間坐標(biāo)位置信息、車輛行駛速度、加速度信息進(jìn)行預(yù)處理、篩選,結(jié)合交通路錐特定外形特征,對(duì)車輛行駛前方交通路錐進(jìn)行識(shí)別,結(jié)合車輛相對(duì)交通路錐位置,對(duì)處于交通路錐引導(dǎo)路段的車輛安全行駛區(qū)域進(jìn)行劃分,并計(jì)算出引導(dǎo)路線,結(jié)構(gòu)如圖2所示。

圖2 結(jié)構(gòu)示意圖
3.1 車輛姿態(tài)坐標(biāo)系轉(zhuǎn)換
基于車載激光雷達(dá)采集的原始三維空間坐標(biāo)位置信息和車輛加速度傳感器采集的車輛行駛速度、加速度信息,對(duì)原始三維空間信息進(jìn)行適應(yīng)車輛姿態(tài)的坐標(biāo)系轉(zhuǎn)換,其計(jì)算方法為:
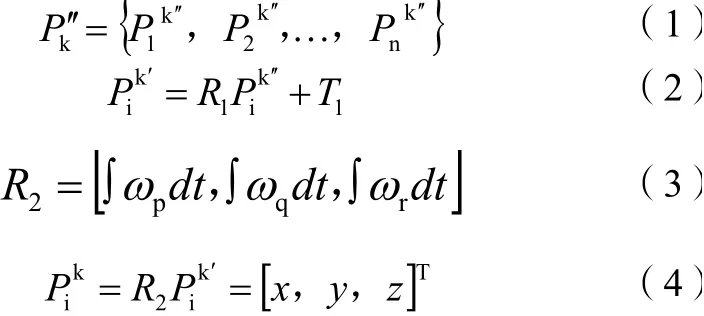
式(1)~(4)中:Pk〞為車載激光雷達(dá)自身坐標(biāo)系下第k幀(k=1,2,3…)的原始數(shù)據(jù)點(diǎn)的集合;R1為車載激光雷達(dá)自身坐標(biāo)系相對(duì)車輛質(zhì)心的車輛坐標(biāo)系的旋轉(zhuǎn)矩陣,由安裝位置決定;Pik'為車載激光雷達(dá)第k幀中第i個(gè)數(shù)據(jù)點(diǎn)轉(zhuǎn)換到車輛質(zhì)心的車輛坐標(biāo)系的坐標(biāo);Pik〞為車載激光雷達(dá)自身坐標(biāo)系下第k幀中第i個(gè)數(shù)據(jù)點(diǎn)的坐標(biāo);R2為自定義的旋轉(zhuǎn)矩陣;ωp、ωq、ωr分別為車輛質(zhì)心的側(cè)偏角速度、俯仰角速度、橫擺角速度;dt為車載激光雷達(dá)每幀周期;Pik為車載激光雷達(dá)第k幀中第i個(gè)數(shù)據(jù)點(diǎn)在第k幀中由于車輛行駛狀態(tài)后變化的車輛坐標(biāo)系下的坐標(biāo);T為車載激光雷達(dá)自身坐標(biāo)系相對(duì)車輛質(zhì)心的車輛坐標(biāo)系的平移矩陣,由安裝位置決定。
3.2 交通路錐的識(shí)別
在處理完原始數(shù)據(jù)之后,對(duì)轉(zhuǎn)換后的數(shù)據(jù)點(diǎn)的進(jìn)行密度聚類分組,將每組數(shù)據(jù)中第k幀有效坐標(biāo)投影到車輛坐標(biāo)系的YZ面,將YZ面劃分為m×n個(gè),l×l的矩形,(ymax/l)≤m<(ymax/l+1),(zmax/l)<n<(zmax/l+1),第s×t個(gè)方塊中心坐標(biāo)為統(tǒng)計(jì)每個(gè)方塊包含點(diǎn)的數(shù)量nums×t,當(dāng)nums×t>c時(shí),即判斷該方塊為有效區(qū)域,c為預(yù)設(shè)閾值。
對(duì)篩選后的坐標(biāo)信息進(jìn)行處理,獲得該組第k幀的兩組YOZ平面上的近似曲線方程,計(jì)算公式為:

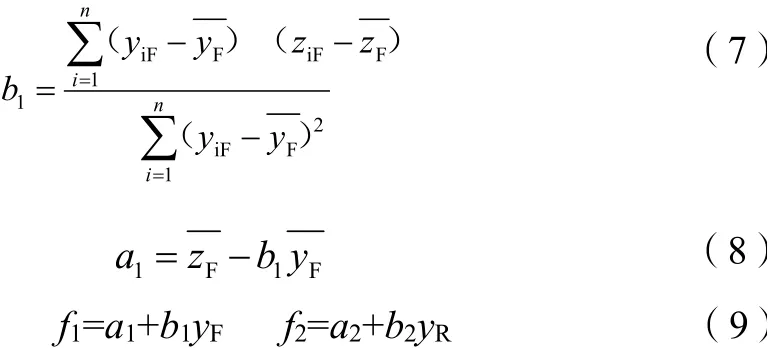
式(9)中:f1、f2分別為有效區(qū)域最左側(cè)回歸直線和最右側(cè)回歸直線;a1、a2分別為f1、f2在Z軸的截距;b1、b2分別為f1、f2在YOZ平面上的斜率。
上述方法中,將已處理后得到的數(shù)據(jù),利用YOZ平面上的近似曲線方程,對(duì)每組第k幀后四幀有效數(shù)據(jù)取均值,其計(jì)算方法為:

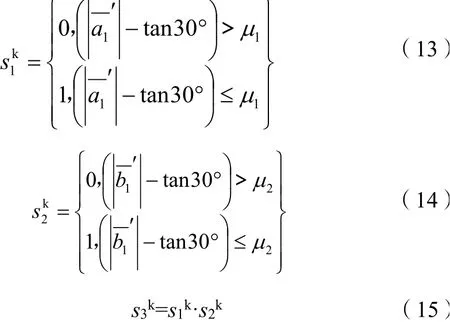
在得到均值后,對(duì)數(shù)據(jù)與交通路錐外形特征進(jìn)行參數(shù)化比較,其計(jì)算方法為:
3.3 車輛安全區(qū)域劃分
根據(jù)車輛自身所處車道位置,將已處理的交通路錐信息進(jìn)行分組,得出車輛在不同車道行駛下的安全行駛區(qū)域,具體可分為兩種狀況處理:①狀況1,車輛不處于交通路錐車道,車輛保持原車道行駛;②狀況2,當(dāng)車輛處于交通路錐車道時(shí),計(jì)算安全行駛區(qū)域。計(jì)算公式為:
式(17)~(18)中:ki為第i組頂點(diǎn)與第1組頂點(diǎn)在XOY平面上的斜率;yi、xi為第i組交通路錐頂點(diǎn)車輛質(zhì)心坐標(biāo)系XOY平面上的縱、橫坐標(biāo);i為數(shù)據(jù)的第i組,{i=1,2,…,n};n為總組數(shù);fL表示過第1組、斜率為kmin組和第n組的二元方程式,即安全行駛區(qū)域?yàn)樵撉€外側(cè)范圍。
4 實(shí)驗(yàn)驗(yàn)證
試驗(yàn)場(chǎng)地選擇在武漢理工大學(xué)內(nèi)校園路段,放置交通路錐模擬施工路段。實(shí)驗(yàn)車輛為一輛用于中國(guó)巴哈大賽的試驗(yàn)車輛,激光雷達(dá)采用速騰聚創(chuàng)公司的RS-LiDAR 32A雷達(dá),加速度傳感器采用耀配的GN1514B006AA型號(hào)加速度傳感器。
在完成對(duì)激光雷達(dá)和加速度傳感器位置的校對(duì)后,通過K66核心板對(duì)傳入數(shù)據(jù)進(jìn)行處理,并利用藍(lán)牙模塊將處理后的交通路錐傳入顯示屏。
車速控制在35 km/h附近范圍,交通路錐數(shù)量為15個(gè),交通路錐高度為500 mm,底座尺寸為320 mm×320 mm。調(diào)整交通路錐相對(duì)車輛的擺放位置,根據(jù)顯示器顯示內(nèi)容對(duì)數(shù)據(jù)閾值進(jìn)行不斷調(diào)節(jié),直至獲得穩(wěn)定的交通路錐引導(dǎo)區(qū)域。
經(jīng)過7組實(shí)驗(yàn),圖像呈現(xiàn)出的安全行駛區(qū)域與實(shí)際相符合,基于交通路錐識(shí)別的車輛安全引導(dǎo)方法能夠有效地在實(shí)驗(yàn)條件下生成安全區(qū)域,并成功生成引導(dǎo)路徑。
5 結(jié)束語(yǔ)
本文介紹的基于交通路錐識(shí)別的車輛安全引導(dǎo)方法,適用于以交通路錐為引導(dǎo)路線的施工路段,為該路況下的車輛安全區(qū)域劃分提供了一種思路。結(jié)合車輛各方向加速度變化,采取先適應(yīng)車輛姿態(tài)的坐標(biāo)系轉(zhuǎn)換,減少后續(xù)運(yùn)算量,并結(jié)合交通路錐特定外形特征進(jìn)行識(shí)別,進(jìn)一步提高了識(shí)別的準(zhǔn)確性。本方法對(duì)車輛所處道路信息分類,結(jié)合上述交通路錐信息,可計(jì)算出兩種情形下的安全行駛區(qū)域,進(jìn)一步提高了計(jì)算的效率、準(zhǔn)確性,從而有效地進(jìn)行車輛安全區(qū)域的劃分。
猜你喜歡
今日農(nóng)業(yè)(2021年9期)2021-11-26 07:41:24
發(fā)明與創(chuàng)新·小學(xué)生(2021年3期)2021-03-25 11:48:49
中華手工(2017年2期)2017-06-06 23:00:31
中國(guó)科技博覽(2016年2期)2016-04-25 20:32:39
小學(xué)生導(dǎo)刊(2016年34期)2016-04-11 00:49:44
電測(cè)與儀表(2015年5期)2015-04-09 11:30:52
中外會(huì)展(2014年4期)2014-11-27 07:46:46
民生周刊(2012年10期)2012-10-14 09:06:46
建筑創(chuàng)作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32
- 科技與創(chuàng)新的其它文章
- 大秦線C80型貨車轉(zhuǎn)向架卡入式滑槽磨耗板一系列故障及防控措施
- 互聯(lián)網(wǎng)+時(shí)代背景下計(jì)算機(jī)應(yīng)用技術(shù)改革的探索
- “互聯(lián)網(wǎng)+”前提“2+2”一站式服務(wù)平臺(tái)在高校應(yīng)用研究
——以廣東外語(yǔ)外貿(mào)大學(xué)南國(guó)商學(xué)院為例 - 高職平面設(shè)計(jì)類課程中微課的設(shè)計(jì)與應(yīng)用研究
- 富水圓礫層蓋挖車站中鋼套筒始發(fā)的應(yīng)用
- 電力物聯(lián)網(wǎng)的接入網(wǎng)技術(shù)研究