專用鍛造機械臂輕量化設計及仿真分析
2021-08-19 08:22:10張泰源張繼忠崔向貴姜錦華
青島大學學報(工程技術版) 2021年3期
關鍵詞:機械臂
張泰源 張繼忠 崔向貴 姜錦華

摘要:? 針對鍛造生產過程中存在的工人勞動強度大和生產效率低等問題,本文對某生產線專用鍛造機械臂進行輕量化設計。通過對機械臂夾持器進行創新設計,減小夾持工件時夾持器所需的最大驅動力,并采用有限元軟件,對機械臂進行極限位置處的靜力學分析,得到了機械臂最大變形約3.64 mm,最大應力約38 MPa。同時,以最大變形為約束條件,以橫梁質量最輕為優化目標,建立有限元數學模型,在滿足機械臂末端承載能力的前提下,采用有限元整體分析和響應面優化相結合的方法,對機械臂進行優化設計。優化結果表明,優化后的機械臂最大變形減少約8%,機械臂橫梁質量減少約25%,達到了專用鍛造機械臂輕量化設計的目的。該研究為機械臂的后續優化工作提供一定的參考價值。
關鍵詞:? 機械臂; ANSYS Workbench; 靜力學分析; 響應面優化; 輕量化
中圖分類號: TP241.3; TP391.9? 文獻標識碼: A
收稿日期: 20210517; 修回日期: 20210620
作者簡介:? 張泰源(1997),男,山東青島人,碩士研究生,主要研究方向為機械系統數字化設計及仿真。
通信作者:? 張繼忠(1964),男,博士,教授,主要研究方向為機械系統數字化設計。 Email: zjzqdu@163.com
近年來,機器人應用水平已經成為一個國家綜合國力的重要體現形式,工業機器人技術發展的高低也成為衡量各國工業自動化技術水平的主要標準[12]。其中,機械手臂是工業應用和理論研究中最典型也是最早出現的工業機器人,隨著科學技術的不斷發展,輕量化成為機器人發展的主要方向之一[35]。目前,輕量化設計主要是從材料和結構兩個方面實現。基于材料輕量化主要采用低密度和高強度材料,在不影響強度的前提下,實現降低自重[67],如德國宇航局采用碳纖維材料來搭建主體的第3代輕型機械臂[8]。而基于結構的輕量化則是在原有材料的基礎上,通過改變結構形狀或尺寸來實現輕量化[910]。湯愛軍等人[11]結合中心復合實驗設計方法建立響應面模型,并采用多目標優化設計方法,對響應面模型進行優化,從而實現鏈輪支架的輕量化;Lee DongChan等人[12]運用拓撲優化和形狀優化,獲得了鋁制懸架控制臂的最佳布局和結構。兩種方法都可以實現輕量化的目的,但基于材料進行的輕量化設計,成本高且加工難度大,所以基于結構輕量化則成為輕量化設計的主要方法[13]。在結構優化時,利用等效約束對單個部件進行優化并不能實際反映構件受力情況,因此應采用整體分析的方法對部件進行優化,以得到符合實際的優化結構[14]。基于此,針對鍛造生產過程中存在的工人勞動強度大、生產效率低等問題,本文對專用鍛造機械臂進行輕量化設計及仿真分析,設計一種可以搬運不同尺寸圓柱形工件的專用鍛造機械臂,在對機械臂夾持器機械結構輕量化設計的基礎上,采用有限元整體分析和響應面優化相結合的方法,對機械臂進行優化,在保證可靠性的前提下,實現總體質量輕的特點。該研究對提高企業自動化技術水平具有重要意義。
1 夾持器輕量化設計
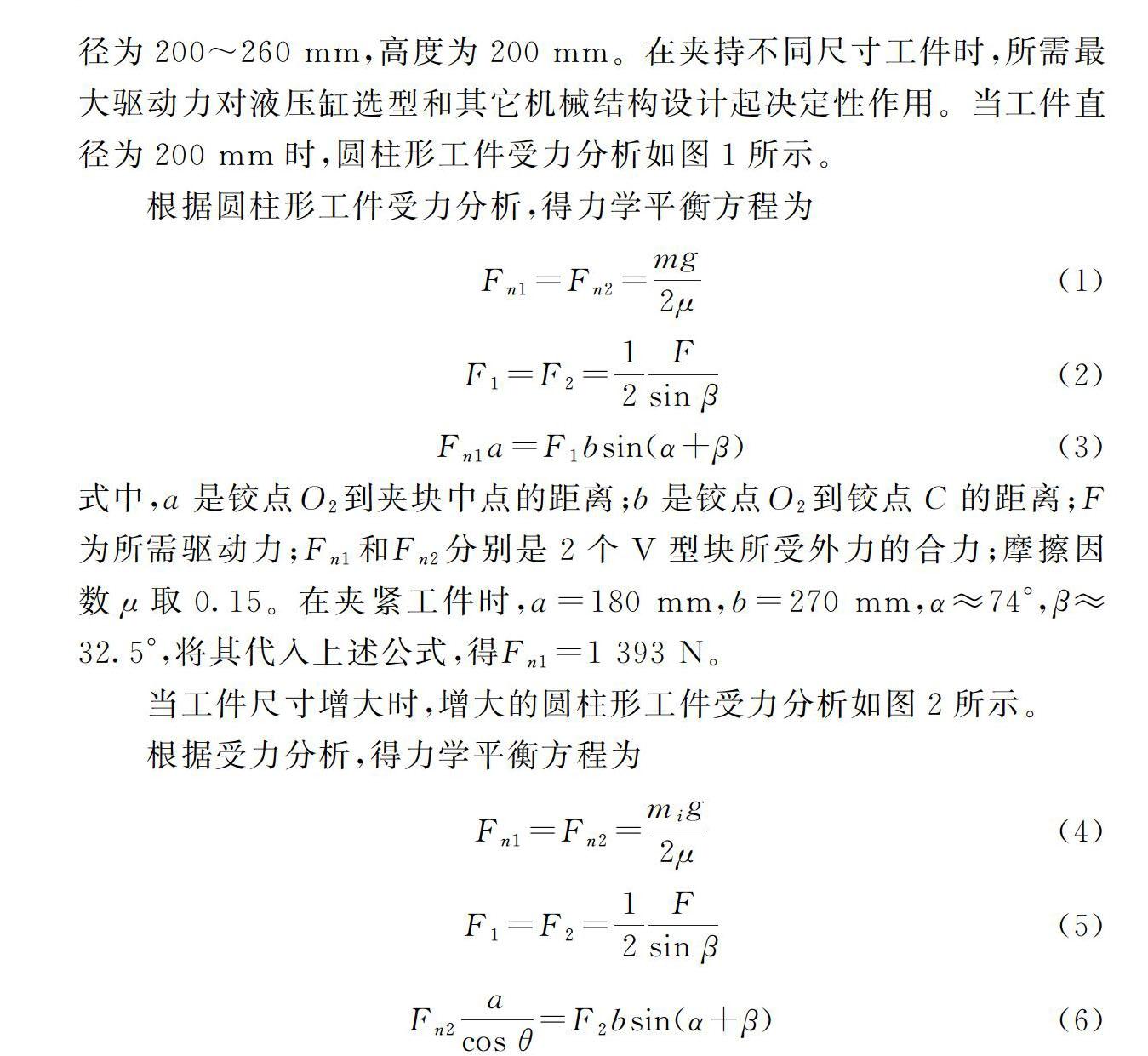
本文設計的機械臂主要用于夾取加熱爐上的工件,并將其搬運到鍛造臺上,在工業上,通常采用指端為V型的夾鉗式機械手夾取圓柱形工件,其具有夾緊平穩可靠和夾持誤差小[15]的特點。因此,機械臂夾持器的設計采用液壓缸驅動六桿機構帶動機械手,實現對圓柱形工件的夾取,夾持器所夾工件為圓柱形,其直徑為200~260 mm,高度為200 mm。在夾持不同尺寸工件時,所需最大驅動力對液壓缸選型和其它機械結構設計起決定性作用。當工件直徑為200 mm時,圓柱形工件受力分析如圖1所示。
根據圓柱形工件受力分析,得力學平衡方程為
Fn1=Fn2=mg2μ(1)
F1=F2=12Fsin β(2)
Fn1a=F1bsin(α+β)(3)
式中,a是鉸點O2到夾塊中點的距離;b是鉸點O2到鉸點C的距離;F為所需驅動力;Fn1和Fn2分別是2個V型塊所受外力的合力;摩擦因數μ取0.15。在夾緊工件時,a=180 mm,b=270 mm,α≈74°,β≈32.5°,將其代入上述公式,得Fn1=1 393 N。
當工件尺寸增大時,增大的圓柱形工件受力分析如圖2所示。
根據受力分析, 得力學平衡方程為
Fn1=Fn2=mig2μ(4)
F1=F2=12Fsin β(5)
Fn2acos θ=F2bsin(α+β) (6)
分別計算工件尺寸每增加10 mm所需的驅動力,不同尺寸工件所需驅動力如圖3所示。由圖3可以看出,隨著工件尺寸的增大,所需驅動力越來越大,也就需要更大尺寸的液壓缸,同時夾持器連桿、抓手等零件的截面尺寸也要加大,這都會帶來機械臂整體質量的增加,不符合輕量化設計的原則。為減少夾持工件所需的最大驅動力,需要對夾持器進行創新設計。改進后的夾持器夾取工件時,首先轉動曲柄軸,通過2個小連桿帶動2個滑塊移動相同的距離,待滑塊到達合適位置后再進行固定,這樣便可安全可靠地夾取不同外徑尺寸的圓柱形工件。改進后的夾持器如圖4所示。
對改進后的夾持器夾取不同尺寸的工件進行受力分析,將計算出的驅動力和改進前進行對比,驅動力對比結果如圖5所示。由圖5可以看出,在對夾持器的機械結構進行改善后,夾持大尺寸工件所需的驅動力明顯減小,因此夾持器連桿、抓手等零件的截面尺寸可相對減小,符合輕量化設計的原則。采用SolidWorks對機械臂的其它部分進行建模并裝配。裝配體三維視圖如圖6所示。
2 機械臂靜力學分析
2.1 建立有限元模型
將模型簡化后導入ANSYS Workbench,對模型賦予相應材料后進行網格劃分[16]。在劃分網格時,將單元尺寸設置為15 mm,其它設置均默認進行網格劃分,最終生成120 324個單元,432 895個節點。
2.2 靜力學分析
對機械臂底座施加固定約束,對整體添加Y軸負方向的重力加速度,加載后,對機械臂整體變形和等效應力進行求解,整體變形云圖如圖7所示,等效應力云圖如圖8所示。由圖7和圖8可以看出,最大變形約3.64 mm,最大應力約38 MPa,變形量小于設計要求,且最大應力遠小于材料許用應力,滿足強度和剛度要求,驗證了機械臂整體結構的合理性。
3 優化設計
要實現專用鍛造機械臂的預期功能,機械臂的尺寸會很大,致使機械臂的質量非常重,因此,在滿足機械臂末端承載能力的前提下,應減小機械臂本體質量,以提高其動力學性能[17]。
3.1 輕量化數學模型
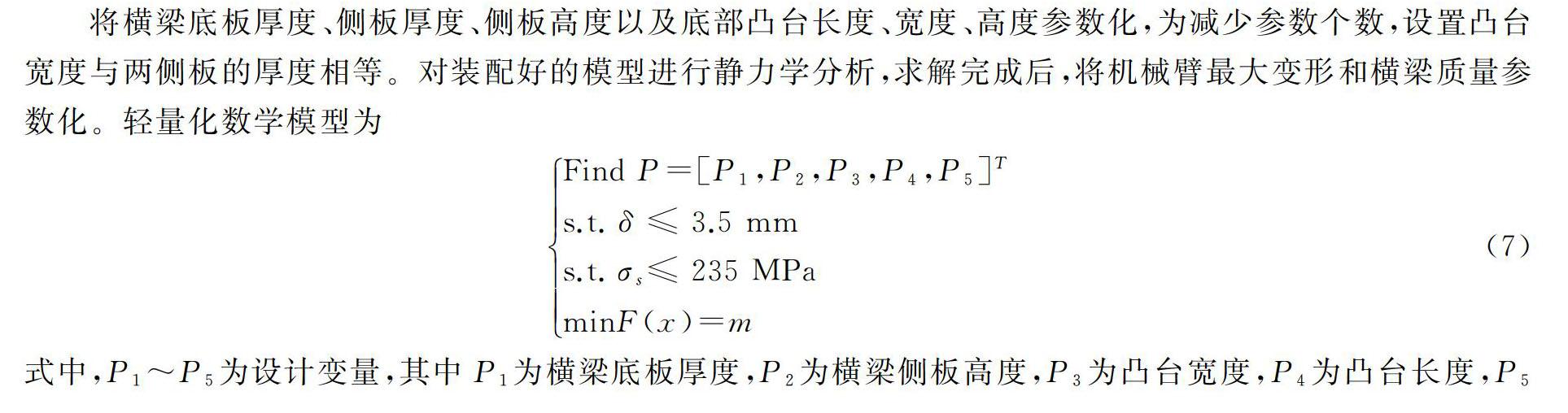
將橫梁底板厚度、側板厚度、側板高度以及底部凸臺長度、寬度、高度參數化,為減少參數個數,設置凸臺寬度與兩側板的厚度相等。對裝配好的模型進行靜力學分析,求解完成后,將機械臂最大變形和橫梁質量參數化。輕量化數學模型為
Find P=[P1,P2,P3,P4,P5]Ts.t. δ ≤ 3.5 mms.t. σs≤ 235 MPaminF(x)=m(7)
式中,P1~P5為設計變量,其中P1為橫梁底板厚度,P2為橫梁側板高度,P3為凸臺寬度,P4為凸臺長度,P5為凸臺高度;δ為最大變形;σs為最大應力;F(x)為優化目標;m為橫梁質量。
3.2 響應面分析法優化
通過Design of Experiments模塊進行優化實驗設計[18],設計變量范圍如表1所示。設置參數后,更新得到27組實驗設計點,實驗設計點響應結果如表2所示。
響應面更新后,由靈敏度分析圖可知,P2(側板高度)、P3(凸臺寬度)對P6(變形)影響較大,P1(側板厚度)、P3對P7(質量)影響較大,為了直觀的觀察分析結果,分別生成P2、P3對P6的響應和P1、P3對P7的響應,變形響應圖如圖9所示,質量響應圖如圖10所示。
3.3 優化結果及優化前后對比
通過Optimization模塊進行優化求解設置,設置最大變形不超過3.5 mm,優化目標為質量最小值。Screening算法是基于采樣和排序的簡單方法,MOGA算法是基于NSGAII的一個變種,適合計算全局最大值或最小值[19]。因此,本文采用MOGA算法,最后生成3個候選點,設置完成后進行求解,求解結果如表3所示。取參考點3為設計點,將數據圓整后的模型重新進行靜力學分析,整體變形云圖如圖11所示,機械臂優化前后各參數對比結果如表4所示。由表4可以看出,通過對比優化前的最大變形和質量,可知機械臂最大變形減少約8%,機械臂橫梁質量減少約25%。
4 結束語
本文以機械臂為研究對象,采用ANSYS Workbench軟件,對機械臂進行了靜力學分析。同時,以最大變形為約束條件,以橫梁質量最輕為優化目標,建立有限元數學模型,得到極限載荷下的應力和變形云圖,并采用有限元整體分析和響應面分析方法,對橫梁部分進行尺寸優化設計。通過對比優化前的最大變形和質量,可得機械臂最大變形減少約8%,機械臂橫梁質量減少約25%。該設計在滿足工作要求的前提下,減輕了零件質量,得到了機械臂橫梁的最優尺寸,實現了質量、成本和結構等方面的最優組合。該研究為該機械臂的后續優化工作提供了理論參考。
參考文獻:
[1] 張小俊, 劉歡歡, 趙少魁, 等. 機器人智能化研究的關鍵技術與發展展望[J]. 機械設計, 2016, 33(8): 17.
[2] 李芳芳, 孫乾. 我國工業機器人發展現狀的調查分析[J]. 機械傳動, 2019, 43(6): 172176.
[3] 胡睿智. 五自由度機械手臂及控制系統的設計[D]. 沈陽: 東北大學, 2011.
[4] 陳超, 陳賀賀, 武姝婷, 等. 工業機器人機械臂的結構優化[J]. 機床與液壓, 2021, 49(3): 2529.
[5] 賀瑩, 高涵, 馬超, 等. MD1200YJ碼垛機器人大臂的多目標輕量化設計[J]. 食品與機械, 2020, 36(10): 7176, 119.
[6] 孫友松, 劉艷. 材料加工技術創新與汽車輕量化[J]. 鍛壓技術, 2007, 32(5): 17.
[7] 郝大賢, 王偉, 王琦瓏, 等. 復合材料加工領域機器人的應用與發展趨勢[J]. 機械工程學報, 2019, 55(3): 117.
[8] Vogel J, Haddadin S, Simeral J D, et al. Continuous control of the DLR lightweight robot III by a human with tetraplegia using the BrainGate2 neural interface system[C]∥Proceedings of the 12th International Symposium on Experimental Robotics. New Delhi and Agra, India: Springer, 2010.
[9] 王進, 王向坤, 扶建輝, 等. 重載機器人橫梁結構靜動態特性分析與優化[J]. 浙江大學學報: 工學版, 2021, 55(1): 124134.
[10] 陳繼文, 陳清朋, 胡秀龍, 等. 碼垛機器人小臂結構輕量化設計[J]. 組合機床與自動化加工技術, 2019(5): 1922, 26.
[11] 湯愛君, 王紅梅, 李同, 等. 基于Ansys Workbench的低位纏繞機鏈輪支架的仿真與優化[J]. 制造業自動化, 2019, 41(1): 145147, 157.
[12] Lee D C, Lee J I. Structural optimization concept for the design of an aluminium control arm[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2003, 217(8): 647656.
[13] 李錦忠, 唐宇存, 陸秋龍, 等. 有限元和拓撲聯合優化方法及其在機器人結構輕量化設計中的應用[J]. 機械科學與技術, 2019, 38(11): 16631668.
[14] 沈仙法, 王海巧. 基于ANSYS的履帶噴霧車車架結構優化分析[J]. 現代制造工程, 2017(8): 4852.
[15] 李允文. 工業機械手設計[M]. 北京: 機械工業出版社, 1996.
[16] 梁競文. 四自由度鍛造機械臂設計及仿真研究[D]. 青島: 青島大學, 2020.
[17] 梁明軒, 李正剛, 唐任仲, 等. 基于柔性多體動力學的機械臂結構優化設計[J]. 中國機械工程, 2017, 28(21): 25622566.
[18] 陳偉業, 鄒天下, 羅健璽, 等. 基于響應面法的鋁翅片翻邊孔成形工藝優化[J]. 鍛壓技術, 2017, 42(12): 1925.
[19] 劉明亮, 朱海清, 李超. 基于ANSYS Workbench的安全閥自動上料機械手抓取機構優化設計[J]. 現代制造工程, 2019(12): 140144.
Lightweight Design and Simulation Analysis of Special Forging Manipulator
ZHANG Taiyuan, ZHANG Jizhong, CUI Xianggui, JIANG Jinhua
(College of Mechanical and Electrical Engineering, Qingdao University, Qingdao 266000, China)
Abstract:? Aiming at the problems of high labor intensity and low production efficiency in the process of forging production, the lightweight design of forging manipulator for a production line is carried out in this paper. Through the innovative design of the mechanical arm gripper, the maximum driving force required by the gripper is reduced when clamping the workpiece. The static analysis of the limit position of the mechanical arm is carried out by using the finite element software. The maximum deformation of the mechanical arm is about 3. 64 mm, and the maximum stress is about 38 MPa. At the same time, taking the maximum deformation as the constraint condition and the lightest beam mass as the optimization objective, the finite element mathematical model is established. On the premise of meeting the end bearing capacity of the manipulator, the finite element overall analysis and response surface optimization are combined to optimize the design of the manipulator. The optimization results show that the maximum deformation of the optimized manipulator is reduced by about 8%, and the weight of the beam of the manipulator is reduced by about 25%, which achieves the purpose of lightweight design of the special forging manipulator. This research provides a certain reference value for the subsequent optimization of the manipulator.
Key words: manipulator; ANSYS Workbench; static analysis; response surface optimization; lightweight
猜你喜歡
科技與創新(2016年23期)2017-03-30 04:12:23
中國科技縱橫(2017年3期)2017-03-29 18:50:48
山東工業技術(2017年4期)2017-03-28 07:56:48
求知導刊(2017年1期)2017-03-24 22:25:58
物聯網技術(2017年2期)2017-03-15 17:04:47
中國科技博覽(2016年27期)2017-01-23 01:32:28
農機使用與維修(2016年12期)2017-01-17 15:23:12
安徽理工大學學報·自然科學版(2016年1期)2016-12-14 22:15:06
計算機教育(2016年7期)2016-11-10 09:01:27
中國科技博覽(2016年9期)2016-04-25 10:13:28
