傾斜攝影與精細建模技術在城市三維建模中的實踐與精度分析
2021-08-31 03:29:42許中勝
科技經濟導刊 2021年22期
許中勝
(安徽省第二測繪院,安徽 合肥 230031)
2017年7月淮北市獲批為國家“智慧城市時空大數據與云平臺建設”試點城市。城市三維建模項目是智慧城市建設的子項目。淮北市城市三維建模項目,需新增建城區40平方千米城市三維實景模型,其中有20平方千米為普通建模,另外20平方千米為精細建模。
1.基于傾斜攝影實景城市三維建模的主要技術要點
1.1 現場踏勘
對測區地形地貌、人員密集區域、建筑物高度等進行現場查看,標注并記錄。經過現場踏勘,將測區分為A、B、C、D四個大區域。其中A區劃分為13個小區域,B區劃分為12個小區域,C區劃分為12個小區域,D區劃分為12個小區域。這里僅介紹B區踏勘情況:
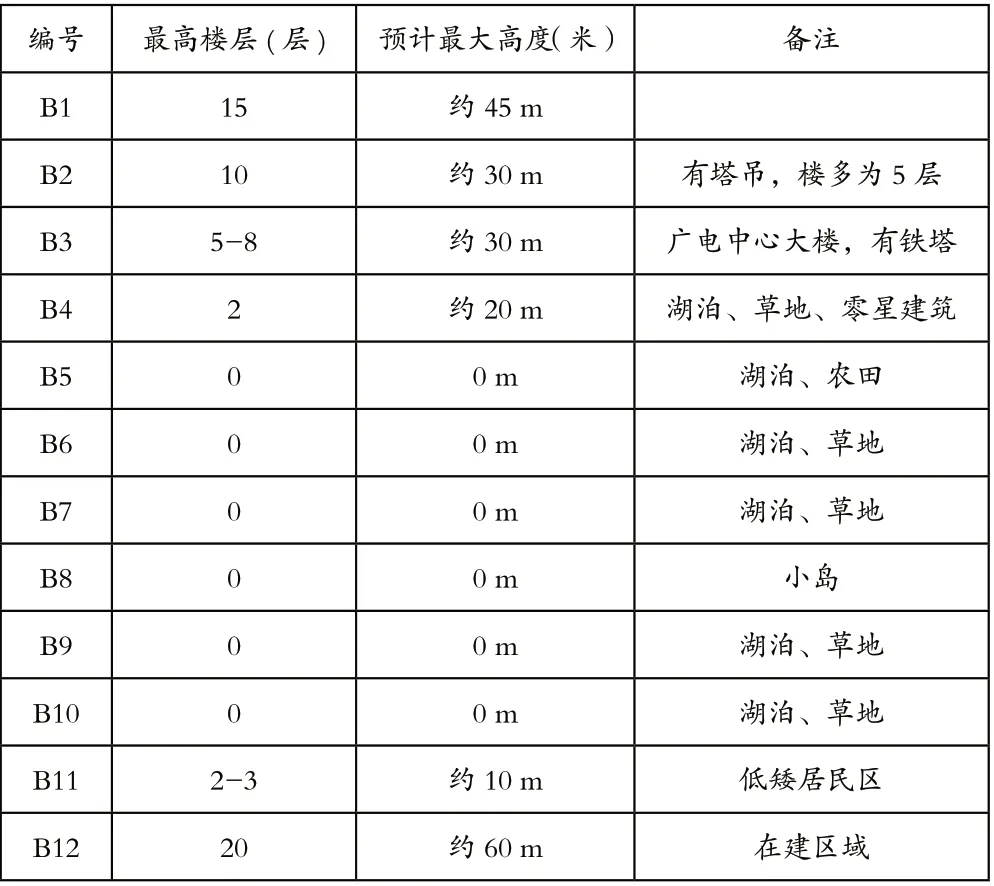
表1 B區踏勘記錄表
1.2 航線規劃、像控預布設
經過前期現場踏勘,項目組決定采用劃分多個區塊的方式進行航線規劃,使得飛機在飛手的可控視線范圍之內,降低飛行風險和工作量。

圖1 任務拆分航線規劃設計圖
1.3 空三加密
空三加密是整個數據生產的關鍵。航片的重疊率、清晰度和旋偏角等因素都會影響空三加密的運算結果。每次空三加密完成后需要查看算出的加密點是否有漂移;如有漂移,判斷漂移的區域是邊緣還是中心;整個空三加密點的相對位置是否正確等。如果空三加密點相對位置不正確或者漂移,并且漂移的區域是中心地段或者是重要區域,就必須重新進行計算。多次計算都未成功,可以刪除一些質量和姿態較差的航片再次嘗試。
多架次的不同高度的航片融合,計算可能會失敗,或者是計算出的加密點漂移。該狀況下,需先創建多個塊。將不同航高的航片導入至不同的塊,分別進行空三加密計算。該步驟計算完成后,記錄解算出來的航片位置與姿態信息。再新建一個塊,加載所有的航片。輸入之前分開算好的航片位置與姿態信息,融合起來進行空三加密計算。此方法可解決不同架次、不同航高航線空三加密問題。
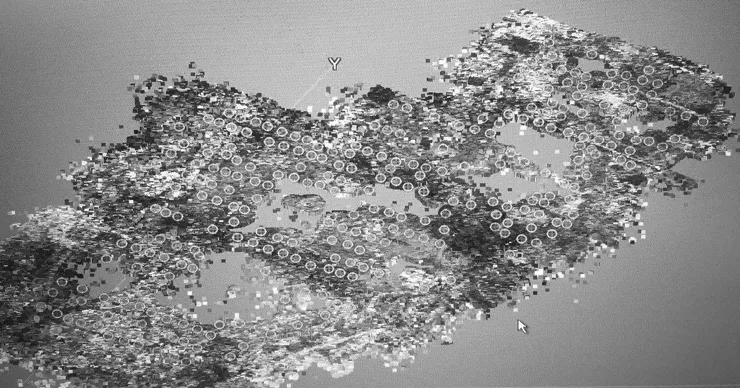
圖2 空三成果展示圖
本項目內業數據處理過程中調用10臺服務器,將任務由大化小,分塊進行計算,最終結算點云結果如圖上所示,模型控制點精度如下圖所示:
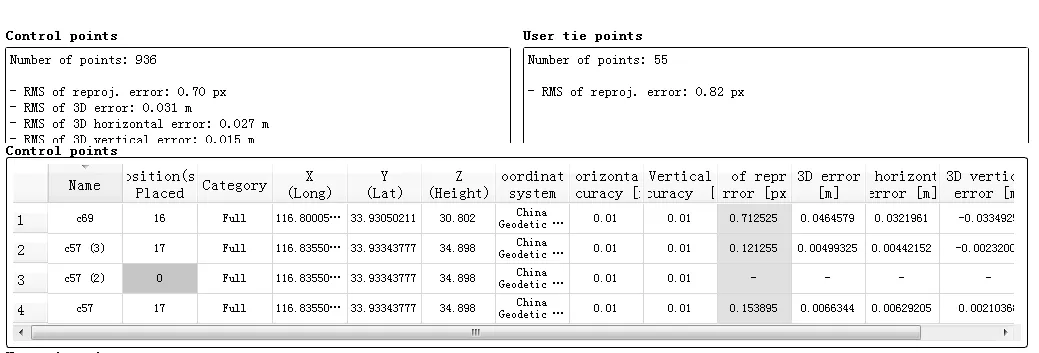
圖3 空三像控精度
由精度報告中得出相片所刺控制點精度都控制在厘米級。
1.4 三維重建
空三加密、控制點刺完之后就開始模型建立貼圖。軟件通過空三加密點計算出不同規則三角網TIN,并且生成白模的三維模型。再通過三維模型形狀位置從航片里面選取最合適的進行紋理的貼合,最后輸出紋理逼真的實景三維模型。把模型切分為多塊來建立模型,這樣可以把系統計算不好的或者是計算機自動不好處理的如水域等單獨提出來進行第三方軟件構網貼圖。
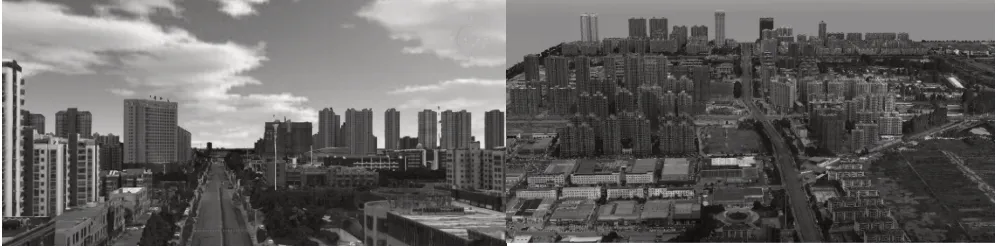
圖4 實景三維模型成果展示
1.5 精細拼接合并
整個模型數據最終需要合并成一個整體,將合并之后的空三點云數據在同一空間框架之下進行切片分割。所有分割模型需統一使用同一坐標原點,且使用同一個切片框架。保證無重復的瓦塊命名。
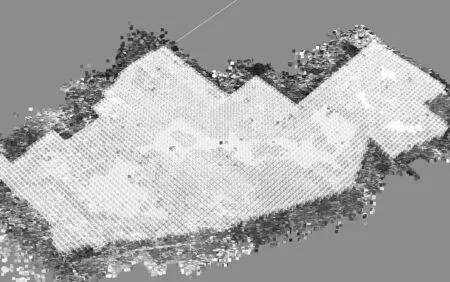
圖5 區塊合并,統一切片片面示意
1.6 精細建模
對劃定的20平方公里范圍的建筑物和構筑物,進行模型測高、外業紋理拍攝、紋理處理,利用實景三維模型基礎圖,基于3DMAX軟件生產制作,形成精細三維模型數據。
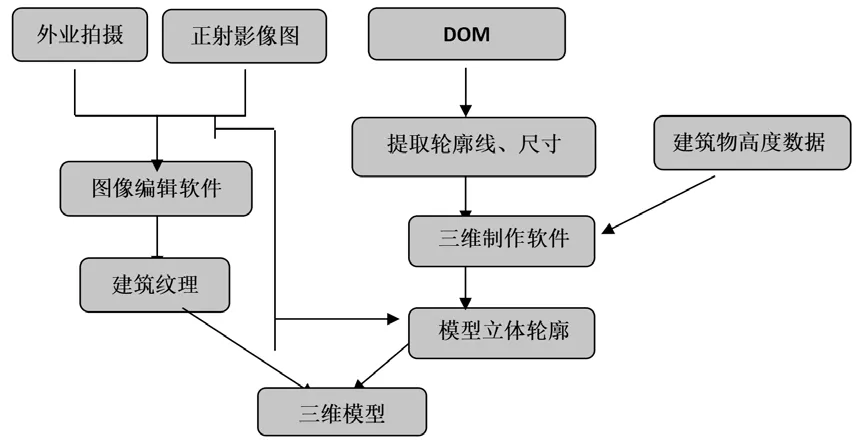
圖6 精細建模流程圖
根據DOM影像數據、傾斜攝影三維模型數據,獲取模型的輪廓底圖及尺寸數據。建模之前,需要在外業,運用地面數碼相機拍攝的照片為貼圖,制作建筑物立面紋理。
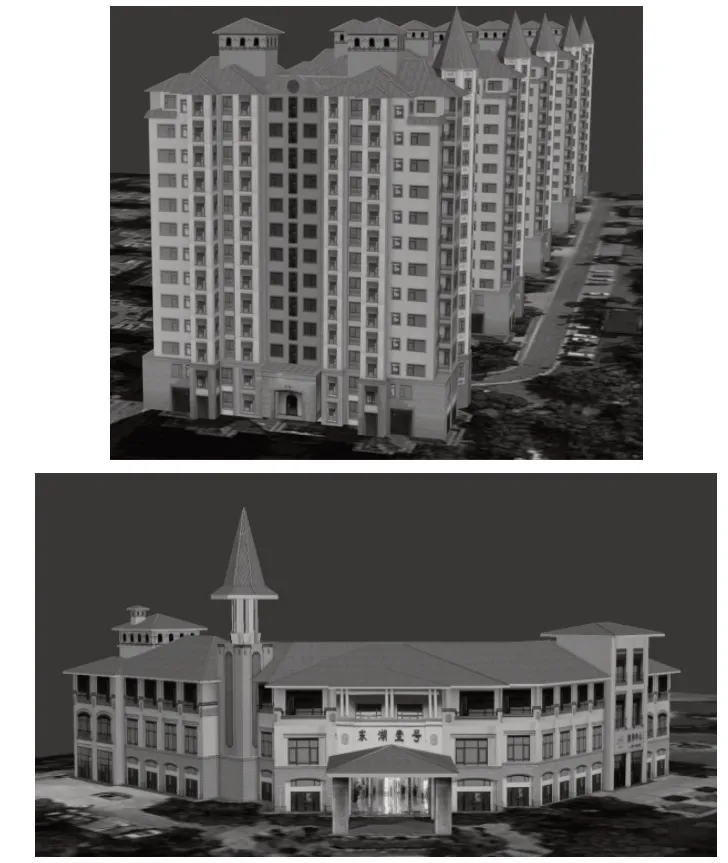
圖7 精細模型單體展示
1.7 模型整合、平臺可視化
對實景三維模型進行裁切,以瓦塊整合至同一空間框架之下,生成osgb格式的模型數據,加載至橢球平臺。導入水面模型,將高程調整至與實景三維模型高程相匹配。對實景三維模型當中結構不完整的樓體結構進行壓平面操作。在此基礎上疊加融合相對應的精細建筑物模型,進一步導入到平臺,進行可視化操作。

圖8 平臺可視化展示
2.質量檢查
2.1 航空影像圖件資料檢查
以飛行區域為單位,檢查各區航空影像數量、重疊率、色彩飽和度、像移等質量。影像應清晰,層次豐富,反差適中,色調柔和;能辨認出與地面分辨率相適應的細小地物影像,能夠建立清晰的立體模型。因飛機航速的影響,在曝光瞬間造成的像點位移不應大于1個像素,最大不應大于1.5個像素。拼接影像應無明顯模糊、重影和錯位現象。融合形成的高分辨率彩色影像不應出現明顯色彩偏移、重影、模糊等現象,檢查結果以下表所示。
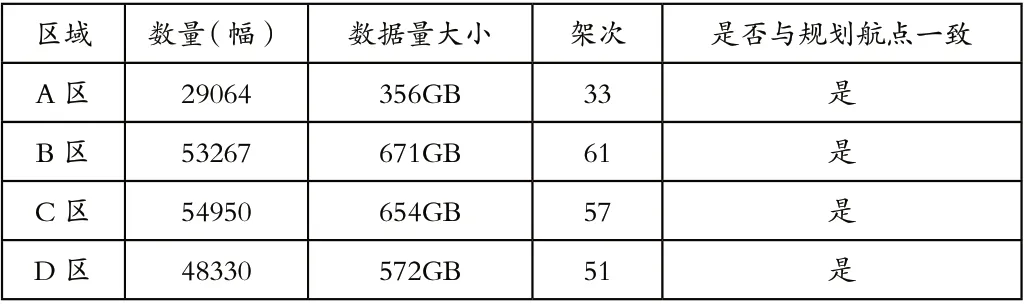
表1 影像數量檢查

表2 影像重疊率檢查表
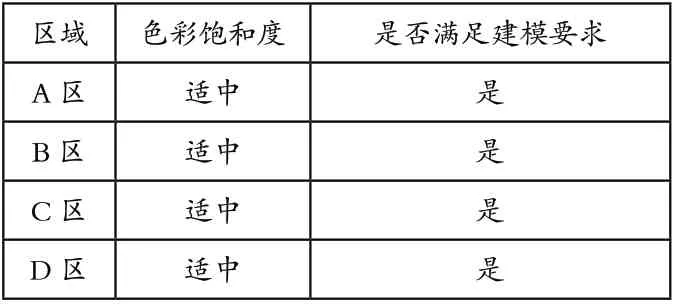
表3 影像色彩飽和度檢查
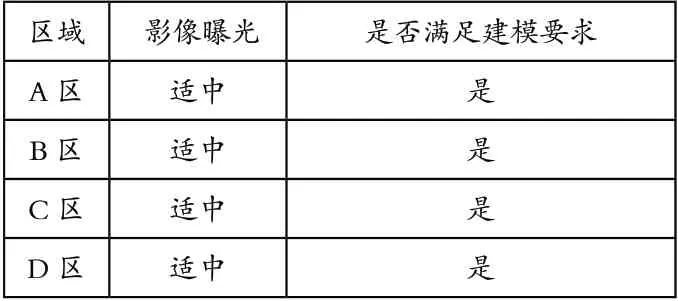
表4 影像曝光度檢查表
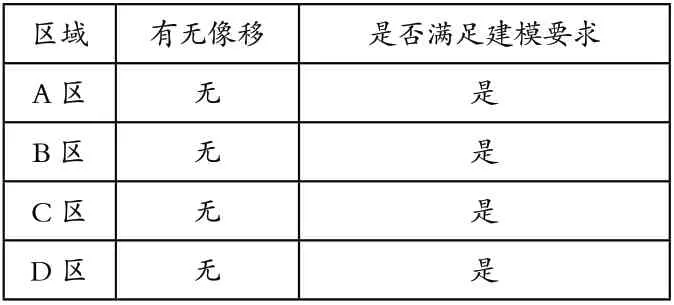
表5 影像像移檢查表
2.2 模型位置誤差檢查
采集模型點位數據與實地外業測量數據對比分析,分別求得點位平面中誤差和高程中誤差。根據《1:500地形圖航空攝影測量內業規范》GB/T7930-2008關于像控點最大中誤差的規范指標得出結論,此模型成果滿足要求。

表6 樣本模型精度檢查主要質量元素
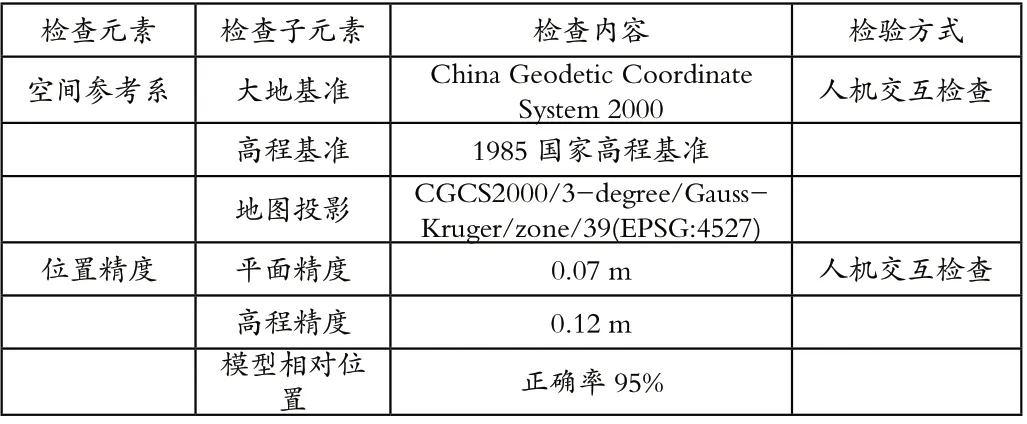
表7 模型精度檢查主要質量元素3
3.結語
從本項目結合工程實際,采用傾斜攝影實景三維建模技術、精細建模等手段,有效提高城市三維建模數據加工生產的效率。在項目實施過程中,針對難點問題做好技術保障,做好各工序質量檢查,確保產品質量。由此獲得的淮北市城市三維模型美觀逼真,精度良好。該項目實踐和質檢分析結果,能為類似作業提供有益參考。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
核科學與工程(2015年4期)2015-09-26 11:59:03
電測與儀表(2015年5期)2015-04-09 11:30:52