
混合無線傳感器網絡覆蓋控制分析
2021-09-13 08:50:27史晶
無線互聯科技 2021年9期
史晶

摘 要:若要實現網絡覆蓋控制,需要優化傳感器節點布置方式,實現經濟成本最小化。文章分析了混合無線傳感器網絡覆蓋控制的重要性,針對網絡覆蓋控制提出了混合網絡雙重漏洞修復算法,通過實驗驗證了算法的可行性和適用性。
關鍵詞:網絡覆蓋;節點;雙重漏洞修復算法
1 無線傳感器網絡覆蓋概述
1.1 無線傳感器網絡
無線傳感器網絡就好比身體的皮膚,在皮膚上分布了大量的傳感器,通過神經系統將這些傳感器連接在一起組成了一個網絡系統,通過傳感器反饋來感知身體表面的溫度變化和其他情況的變化。因為需求的關系,某些節點還有定位模塊、運動或執行機構、電源再生模塊等其他更強大的功能。
1.2 無線傳感器網絡覆蓋技術
在實際工作中,為了保證信息的完整性和有效性,單個傳感器節點往往滿足不了龐大的工作,只有大規模的傳感器節點互相協作才能實現對物理世界信息的獲取。無線網絡覆蓋是通過對傳感器節點分布和設置進行有效的調度和部署來實現,對工作區域的覆蓋度是能否完成任務的重要因素。
在設計無線傳感器網絡時,為了達到對物理世界信息的獲取,需要保證傳感器網絡的質量,所以在設置之初就要考慮在復雜情況下的不同應對措施。首先,要有對工作區域布置傳感器節點的規劃,但在實際操作時可能受到外界環境或者操作的影響造成與規劃不符的情況,導致傳感器網絡節點覆蓋不合理。其次,對于之前覆蓋的節點進行合理調整。個別傳感器節點可能存在損壞或者不在網絡中,要對其進行修復和調整。再次,在網絡運行之后,后臺會對節點的部署進行運行反饋,如果傳感器節點存在能量不足或者數量不夠而陷入無法工作的狀態,這時無線網絡覆蓋技術就會發揮作用,對接點進行覆蓋控制。因此對于網絡節點的覆蓋控制性能和如何提高覆蓋性能變得尤為重要。
1.3 無線傳感器網絡覆蓋問題
工作區域實施覆蓋控制的目的是通過對傳感器節點的分布設置減少區域內的盲區和網絡中冗余的節點布置,從而實現對檢測區域或者對檢測對象物理信息的獲取和精確感知[1]。
1.3.1 節點類型分類
(1)靜態覆蓋。
通常情況下,傳感器節點一旦被部署就不會改變其位置信息,這叫做靜態部署。工作原理是通過喚醒其他位置上的節點,如果其他節點處于休眠,隨即喚醒對應的工作節點集合,使休眠的節點對應非工作狀態集合,實現兩個集合動態變化,這樣在網絡覆蓋連通性和節能之間取得平衡,其關鍵點就是找到兩個集合不相交的集合點。
(2)動態覆蓋。
動態覆蓋存在的意義是,如果密集部署節點,各節點之間可以實現很好的連通性,但是當節點癱瘓時,由于靜態節點只能修復相對較小的覆蓋區域,此時問題的關鍵就是如何調節節點位置保證覆蓋的連通性和避免漏洞。使用動態部署增加節點的數量實現增量式節點部署就是逐個的部署節點[2]。
1.4 無線傳感網絡覆蓋性能評價指標
準確評價和衡量覆蓋控制策略性能、可用性和有效性,從而使傳感器節點的感知和服務質量提高,可以使節點能量有效發揮,去掉冗余的節點,使無線網絡生存周期延長。可從以下幾個方面判斷:①覆蓋能力;②網絡連通性;③能量保障;④控制計算精確;⑤算法復雜程度;⑥算法策略實施;⑦網絡擴展性;⑧網絡動態和兼容性。
2 ? 基于混合網絡的覆蓋漏洞雙重修復算法
靜態節點只能修復較小的區域,動態節點即如果蘇醒節點探測到處于簇頭狀態的鄰居節點大于3個,所組成的三角形集合的邊大于R則進入簇頭狀態。
2.1 建立網絡模型
假設將節點部署在二維平面上進行隨機分布,設置S為多個階段的集合,將任意節點設為Sk采用布爾感知模型。Sk的簇內節點,Sk的鄰居節點、Sk的二跳鄰居節點分別滿足公式1,2,3。
2.2 混合網絡的雙重漏洞修復算法
2.2.1 靜態節點修復
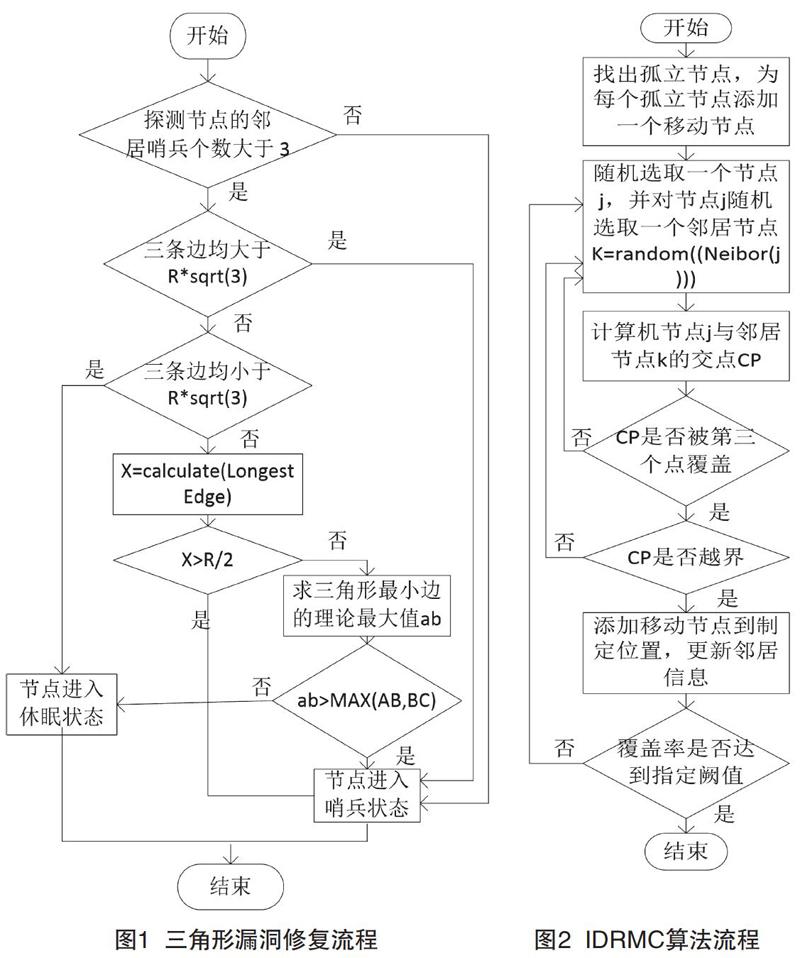
DRA算法針對漏洞修復的步驟是:①假設任意節點蘇醒后發現簇頭狀態的鄰居節點數少于3個,那么該節點將進入簇頭狀態;②如果蘇醒節點探測到處于簇頭狀態的鄰居節點大于3個,而且組成的三角形集合的邊大于R則進入簇頭狀態;③如果蘇醒節點探測到處于簇頭狀態的鄰居節點大于3個,而且組成的三角形集合的邊小于R則進入休眠狀態;④如果以上3個條件據均不滿足,選擇任意3個簇頭狀態的鄰居節點,根據公式判定節點是休眠還是簇頭狀態。三角形漏洞修復流程如圖1所示。
2.2.2 動態節點修復
當某個節點失效或者覆蓋面積較小時,可以利用靜態節點三角理論進行漏洞修復,但是如果覆蓋漏洞面積較大時就很難對其修復。這時就要借助Improved DRMC算法來判斷是否是漏洞節點[3]。具體流程如圖2所示。
2.2.3 利用IDRMC算法進行雙重修復
如上文所述,因為節點狀態不同,在漏洞修復算法上也要有區別。在靜態節點狀態時運用三角修復策略,動態節點采用IDRMC算法計算節點位置進行修復。
根據節點的特殊性,利用IDRMC算法得出的節點位置,節點如果超出了覆蓋區域,此時不予修復漏洞;當孤立節點如果有二跳鄰居點,選擇兩個節點中間位置部署移動節點,如果無二跳鄰居節點,則需要添加一個移動節點與之相切。
如果靜態節點較多,可以選擇休眠機制進行三角修復。如果數量較少或節點癱瘓較多,先用EEHR對部分節點進行休眠,再利用IDRMC算法進行漏洞修復。
2.3 仿真實驗與分析
本實驗從系數部署的性能和密集部署的性能進行分析,利用布爾感知模型將節點布置在二維平面上,通過MATLAB 2012來實現。實驗參數設置區域是150 m×150 m,感知半徑RS=10 m,通信半徑是Rt=2RS=20 m。
2.3.1 對稀疏部署性能的分析
從覆蓋性能進行對比。通過實驗數據分析和效果圖呈現,當移動節點在稀疏部署節點時,其覆蓋性能優于靜態節點。但是當移動節點部署達到一定數量時,會出現節點重合現象,就失去了經濟適用性。
從連通性進行對比。通過數據分析和連通圖的對比,在稀疏部署時,移動節點的連通性和通信能力優于靜態節點。
2.3.2 對密集部署的性能分析
實驗中設置節點數量上選擇相同的節點個數,通過實驗數據和效果圖對比,驗證了在密集部署時靜態節點通過三角形修復漏洞效果良好,就無需使用動態節點修復,大大節約了經濟成本。
3 結語
通過分析了解到無線傳感器網絡覆蓋存在的問題,提出解決算法既雙重漏洞修復算法,利用仿真實驗對覆蓋性能進行有效分析并得出相應的結果,驗證了雙重漏洞修復算法的可行性。
[參考文獻]
[1]鄭鑫,程宗毛.無線傳感器網絡覆蓋率優化算法[J].新型工業化.2020(7):6-8.
[2]高亞玲.混合型無線傳感器網絡覆蓋空洞修復算法研究分析[J].電子設計工程.2020(9):121-125.
[3]坎香.無線傳感網絡及其覆蓋問題[J].電子技術與軟件工程.2018(22):21-22.
(編輯 何 琳)
