基于廣義回歸神經網絡的強干擾下垂直陣目標距離估計方法?
2021-09-22 03:14:24姚琦海黎佳藝楊益新
應用聲學 2021年5期
姚琦海 汪 勇 黎佳藝 楊益新
(西北工業大學航海學院 西安 710072)
0 引言
水下目標定位利用基陣接收到的聲信號來探測目標聲源的位置,一直以來是水聲信號處理領域的熱點,本文研究其中的一個方面——目標距離估計[1?3]。在軍事和民用領域中,隱蔽性較好的被動定位技術有著廣泛的應用。傳統的被動定位方法大多為基于匹配場處理(Matched field processing,MFP)的方法。1976年,Bucker[4]推導出了線性匹配場處理器,使用實際環境模型,引入了距離深度的模糊函數。1988年,Baggeroer[5]建立水平分層的海洋環境波導模型,將MFP 技術應用在低信噪比場景中,研究表明增加帶寬可以提升匹配場算法的定位性能。1996年,Michalopoulou等[6]提出利用非相關方法對各個頻點的窄帶模糊度函數疊加,驗證了寬帶匹配場定位算法中非相關方法的可行性。2003年,Soares 等[7]利用各個頻點之間的相關信息,建立了歸一化相關處理器、匹配相位相關處理。2006年,楊坤德等[8]針對環境失配條件下的強干擾問題,提出了一種線性匹配場干擾抑制算法。2018年,賈雨晴等[9]提出了一種在聲速剖面時變環境下的自適應匹配場定位算法,結果表明該算法的定位性能較常規匹配場算法有較大提升。MFP 方法利用水聲信道特性將聲傳播模型和陣列信號結合起來,實現水下目標被動定位。但此類模型驅動方法需要海深、聲速剖面等參數,在低信噪比和缺少環境參數的情況下,會嚴重影響定位性能。隨著機器學習技術的迅速發展,以神經網絡為代表的數據驅動方法在水聲領域得到了廣泛的應用。
基于數據的機器學習模型不需要海洋環境參數,而基于聲場理論的模型會受到環境失配的影響。1991年Steinberg等[10]建立單層神經網絡模型對均勻介質中的點聲源進行深度估計,但受限于當時的機器學習技術發展不成熟,加之傳統的MFP方法為當時主流的被動定位算法,因此,在之后的很長一段時間,機器學習方法在水聲被動定位領域的發展較為緩慢。2017年,Niu 等[11]利用前饋神經網絡(Feed forward neural networks,FFNN)、支持向量機模型,結合海試實測數據驗證了機器學習算法的定位性能。2018年,Wang等[12]引入了廣義回歸神經網絡(Generalized regression neural network,GRNN)方法,實現了淺海高信噪比環境下有效的目標距離估計;Huang 等[13]將聲場模型數據用于訓練,建立多層深度卷積神經網絡(Convolutional neural networks,CNN)模型估計淺海聲源位置。2019年,Liu 等[14]在深度范圍大致確定的前提下,利用一維CNN 和集成學習實現了水下目標距離估計;Niu 等[15]在不確知環境下,采集單水聽器接收到的聲壓值,利用50 層殘差CNN 探測聲源。2020年,Liu 等[16]將實際數據和仿真數據的組合作為訓練數據,并利用CNN 估計聲源的深度和距離;張巧力等[17]搭建了單隱藏層的FFNN,并利用SWellEX-96實驗S5航次的垂直陣數據進行驗證。以上研究利用CNN、支持向量機等模型對水下單目標進行了位置估計,但大多相關研究是在沒有強干擾的高信噪比下的海洋環境中實現的。
機器學習在低信噪比的海洋環境中的應用相對較少,2016年,Niu 等[18]輸入歸一化互譜密度矩陣,訓練僅有一個隱藏層的FFNN,實現在訓練樣本較少和低信噪比下的距離估計。2018年,Ozanich等[19]使用KRAKEN 模型生成垂直陣列在低信噪比下接收到的聲壓幅值和相位,利用CNN 在多頻復聲壓場中訓練距離特征,研究表明通過增加訓練數據,可提升低信噪比下的定位性能。2020年,Ozanich 等[20]利用FFNN 進行方位估計,用SWellEX-96 實驗中在強干擾下的S59 航次數據進行驗證,并與支持向量機方法進行了對比,結果證明了深層FFNN 模型在水平陣被動定位中應用的可行性。
在實際淺海中,往往存在著強度較大的水面干擾聲源,比如大型的船舶,對水下目標聲源的定位造成了很大的考驗,傳統的MFP 方法在此場景下性能較差,因此,在淺海強干擾下的目標距離估計中,研究和建立基于數據驅動的機器學習模型有重要意義和價值。本文利用美國海洋物理實驗室1996年5月在距Point Loma 約12 km 處進行的一次淺海實驗(SWellEX-96 實驗)中的S59 航次數據研究強干擾下的垂直陣定位問題[21],為研究兩類驅動方法在強干擾下距離估計性能的差異,本文對基于數據驅動的GRNN和CNN方法和基于簡正波模型的傳統MFP方法的性能進行了比較。
1 MFP
通過簡正波模型以及環境參數,可以計算出聲源在特定位置情況下接收陣位置的復聲壓,作為拷貝向量。在簡正波模型下,(0,zs)處單頻點聲源在(r,z)處產生的聲壓表達式[22]為
其中,ρ為介質密度,Ψm(z)和krm分別為第m號簡正波的模深函數(特征函數)和水平波數。
對水聽器陣列接收到的數據與拷貝向量進行匹配,在計算得到的距離-深度模糊表面中尋找最大值,該點對應位置即為估計位置[23]。由互譜密度矩陣R和拷貝向量ω計算MFP 的定位模糊度平面B:

其中,pl為拷貝場下基陣接收到的復聲壓,?為聲源位置參數,(·)H為共軛轉置,L為快拍數,Pl為第l個快拍下基陣頻域數據向量。
對寬帶信號,累加平均各個頻率對應的模糊度平面,即可得到寬帶信號的模糊度平面。
2 GRNN
基于核回歸分析的GRNN 是一種前向神經網絡,且有著優良的非線性映射能力。GRNN 通過計算訓練數據的輸入輸出和測試數據的輸入,得到條件概率密度函數,從而進一步得到測試數據的輸出[24]。GRNN只需要選擇一個網絡參數,而其他神經網絡一般需要選擇多個參數,因此GRNN在網絡搭建上有著較強的優勢。
GRNN 包含輸入層、模式層、求和層、輸出層,其結構如圖1所示。輸入層將輸入向量傳遞給模式層。模式層神經元個數和訓練樣本個數N一致,每個訓練樣本均有相對應的神經元。神經元Gi為訓練數據輸入Xi和測試數據輸入X間的歐式距離平方的指數:

圖1 GRNN 結構圖Fig.1 GRNN structure chart
其中,σ即為需要選擇的擴展因子。
模式層包含一個D神經元和K個S神經元,D神經元為所有模式層神經元的算數求和,S神經元為其對應的加權求和(模式層的第i個神經元和求和層的第k個神經元之間的權重為yik),即

輸出層神經元個數為輸出向量的維度K,對應神經元的輸出由對應模式層Sk除以D計算得到:

2.1 信號預處理
GRNN的輸入特征為采樣協方差矩陣(Sample covariance matrices,SCMs)[25]。由于存在聲源振幅的影響,將陣元數為L的基陣接收的頻域復聲壓P(f)=[p1,p2,···,pl,···,pL]T進行范數歸一化:

利用歸一化后的復聲壓,采樣協方差矩陣根據Ns個快拍數據平均計算得到,即

GRNN 模型的輸入為采樣協方差矩陣的上三角矩陣對應復數元素的實部和虛部。單頻信號的輸入特征維數為1×L(L+1),將多個頻點的特征連接起來得到寬帶信號的輸入特征,其維數為1×L(L+1)Nf,其中Nf為頻點數。
2.2 擴展因子選擇
GRNN只有一個網絡參數,只需優化擴展因子,即可提高網絡的訓練性能,本文使用k折交叉驗證來確定最優擴展因子,方法如下:
(1)確定擴展因子的取值范圍,比如如0.01,0.02,···,0.1,步長為0.01。
(2)將平均絕對百分比誤差(Mean absolute percentage error,MAPE)作為定位性能的衡量指標

其中,Rgi為神經網絡預測數據,Rti為實際數據。
(3)對k折交叉驗證,隨機地將訓練數據分成k折,驗證集為其中的1 折,訓練集為其他的k ?1 折,本研究選擇10折。
(4)對每一個擴展因子,首先將訓練集用于訓練,再測試驗證集,并計算對應的MAPE;將每一折訓練樣本均作為一次驗證集,重復上述過程,統計并計算k個MAPE的均值,即平均MAPE。
(5)對所有擴展因子,重復步驟(4),將平均MAPE的最小值對應的擴展因子左右均設置一個步長的區間,再將步長調整為之前的1/10,即0.001,再重復步驟(4),將平均MAPE 的最小值對應的擴展因子作為最優擴展因子,該方法可將最優擴展因子的精度提高至0.001,從而進一步提高網絡的訓練性能。
3 海試數據驗證
3.1 實驗描述
SWellEX-96共包含S5和S59兩個航次,圖2為海試環境參數,圖3為該實驗S59航次地圖,圖中藍線表示目標聲源軌跡,紅線表示干擾聲源(水面艦船)軌跡。本文將該實驗中有強干擾的S59 航次的垂直陣接收的數據用于網絡的訓練和測試。實驗船共拖曳了深(54 m)和淺(9 m)兩個聲源,其速度約為2.5 m/s,共采集了65 min 數據,發射在49~400 Hz 之間多個頻點的連續波(Continuous wave,CW)信號。實驗使用共有22 個水聽器的垂直陣,采樣頻率為1.5 kHz,布放的深度為94.125~212.25 m 之間,在實驗中有一個水聽器出現故障,因此僅使用其他21 個水聽器的測量數據,干擾信號由水面艦船發出,頻段為62~401 Hz[21]。

圖2 SWellEX-96 實驗淺海環境參數模型Fig.2 Swellex-96 experiment shallow sea environment parameter model
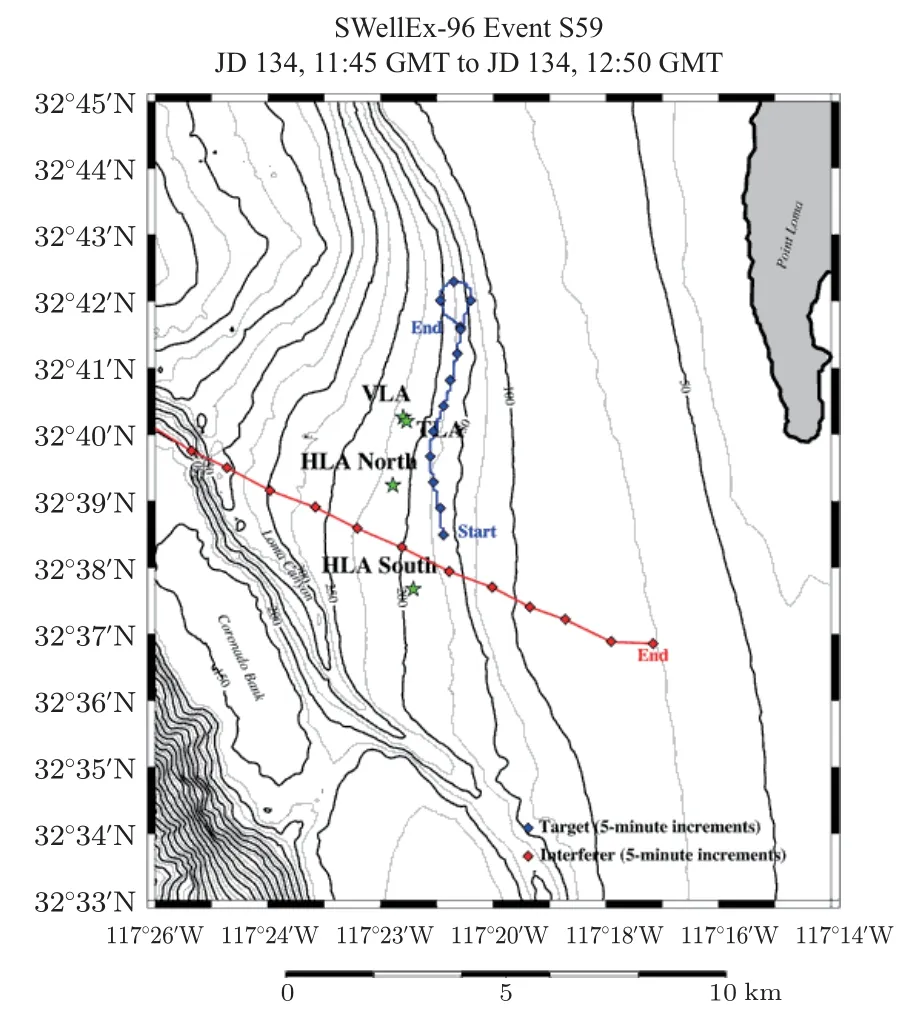
圖3 SWellEX-96 實驗S59 航次地圖[21]Fig.3 Swellex-96 experiment S59 voyage map[21]
3.2 實驗數據處理及結果分析
3.2.1 MFP定位
本文對深(54 m)聲源進行距離估計,窄帶聲源的中心頻率為235 Hz,{112 235 388}Hz 三個頻點(SWellEX-96實驗中發射聲源級最大的一組頻點中取得)作為寬帶聲源頻率,設置海域的搜索距離范圍是0~10 km,間隔為10 m;深度范圍1~200 m,間隔為1 m,從而計算拷貝場。測試海域為淺海,且為距離不相關的波導環境,聲源發射信號為低頻,因此使用基于簡正波模型的Kraken程序進行仿真,聲壓場的互譜密度矩陣由3 個1 s 的快拍數據計算得到,基于Bartlett 算法估計出水下目標聲源的空間位置。圖4 為以實際距離3.93 km 處為例的窄帶和寬帶模糊度平面圖,圖5 為窄帶和寬帶的距離估計結果。結果表明:在強干擾下,MFP 無法得到有效的距離估計,由于簡正波模型不適合近場聲場建模,導致在0~2 km 之間的聲源定位效果較差。相比窄帶聲源,寬帶聲源的距離估計性能略好。

圖4 MFP 模糊度平面圖Fig.4 Ambiguity surface of MFP

圖5 MFP 在測試集上的距離估計結果Fig.5 Range estimation results of MFP on the test set
3.2.2 CNN
該實驗共記錄了65 min 數據,每1 min 給出了該時刻的空間位置信息,將該66個位置的對應數據作為測試樣本。在相鄰的兩個測試樣本間,每間隔5.0 m(約為2 s)作為一個訓練樣本,距離值通過插值獲得,各個選取頻率及各位置下的SCMs 由3 個1 s 快拍數據平均計算獲得,共1775 個插值點作為訓練樣本(為避免測試集泄漏,剔除距離測試樣本5.0 m 的訓練樣本),窄帶和寬帶聲源的特征數分別為462和1386,網絡輸入分別為1×462和1×1386的一維序列。隱藏層由卷積層和全連接層組成,其中卷積層使用卷積核大小為5,在3 個階段中,步長分別為1、2、2,濾波器個數分別為5、10、20。卷積之后通過批規劃化層使得卷積輸出滿足0 均值和1 標準差,批規范化后使用修正線性函數ReLU 作為激活函數。卷積層之間使用殘差連接來訓練深層網絡,卷積層之后為全局平均池化層、全連接層、ReLU 激活層、比率為0.5 的Dropout層和回歸層[26]。
網絡輸出為距離值,因此輸出層僅有一個神經元。作為回歸問題,網絡訓練使用

作為損失函數,采用Sgdm算法作為優化算法,學習率為0.0001,最大迭代次數為500,圖6 為網絡的總體結構。圖7 為CNN 在測試集上的距離估計結果,可得到CNN 方法相比MFP,可以在環境失配下的0~2 km 下有較好的估計性能,但其精度和穩健性相比GRNN 方法較差,網絡參數較多,訓練時間較長,并且容易過擬合。
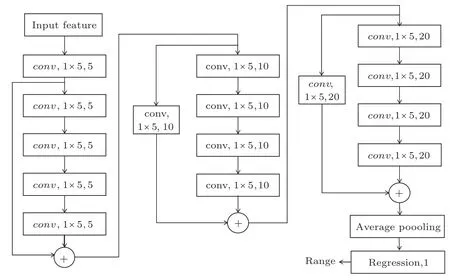
圖6 CNN 結構圖Fig.6 CNN structure chart

圖7 CNN 在測試集上的距離估計結果Fig.7 Range estimation results of CNN on test set
3.2.3 GRNN回歸器
GRNN的輸入和CNN一致,圖8為窄帶聲源和寬帶聲源在不同擴展因子下的預測結果,可得到窄帶聲源和寬帶聲源的最佳擴展因子分別為0.005 和0.006。窄帶聲源和寬帶聲源的驗證集在GRNN 方法下的距離估計結果如圖9所示,可得到:和MFP相比,GRNN對窄帶和寬帶聲源的距離估計性能均明顯提升,尤其是在0~2 km 間的聲源距離估計。

圖8 GRNN 在驗證集上不同擴展因子的距離估計結果Fig.8 Range estimation results of different extension factors of GRNN on the validation set

圖9 GRNN 在測試集上的距離估計結果Fig.9 Range estimation results of GRNN on the test set
窄帶和寬帶聲源的距離分別在MFP、CNN和GRNN 三種方法估計下的MAPE 如表1所示。由表1 的橫向對比可得到,窄帶聲源和寬帶聲源在GRNN 方法下的MAPE 均遠小于CNN 和MFP,GRNN 估計性能明顯優于CNN 和MFP; 相比MFP,CNN 方法下的MAPE 較小,CNN 的估計性能較為優良。由表1 的縱向對比可得到,GRNN、CNN 和MFP 三種方法對寬帶聲源的MAPE 均小于窄帶聲源,由于和窄帶聲源相比,寬帶聲源的輸入特征較多,因此其估計性能會更好。
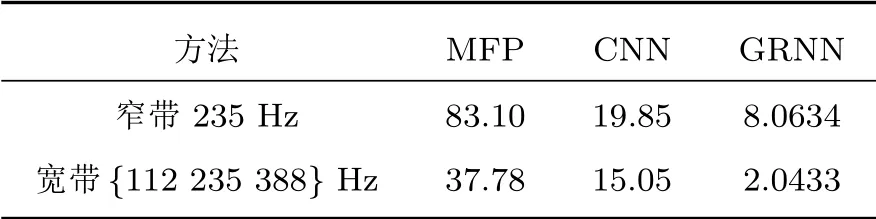
表1 寬帶聲源和窄帶聲源在不同方法下的MAPETable 1 MAPE of broadband and narrowband sources under different methods
寬帶聲源的距離在3 種方法下估計結果的絕對誤差如圖10所示。MFP、CNN 和GRNN 的平均絕對誤差分別為1.121 km、0.310 km 和0.058 km,CNN 和GRNN 均大幅度地減小了距離估計的絕對誤差,且GRNN 具有最高的估計精度和最好的穩定性。

圖10 寬帶聲源在3 種方法下距離估計結果的絕對誤差Fig.10 Absolute error of range estimation results for broadband sound sources under three methods
4 結論
機器學習在水聲被動定位領域的結合日益密切,本文研究其中的目標距離估計方面,大多相關研究是在高信噪比下的目標距離估計,而機器學習在強干擾下的低信噪比海洋環境中應用相對較少。本文提出了基于優化擴展因子的GRNN,并利用SWellEX-96 實驗中在強干擾下的S59 航次數據進行了方法的驗證,對比了MFP、CNN、GRNN 三種方法的水下目標聲源距離估計性能。可得到,數據驅動的GRNN和CNN方法距離估計性能明顯優于傳統模型驅動的MFP 方法,在已知海洋環境參數的條件下,GRNN、CNN和MFP三種方法對寬帶聲源的估計性能均優于窄帶聲源,且對窄帶和寬帶聲源,GRNN 均具有最優的估計性能,在海洋環境參數出現失配時,MFP方法已不適用,CNN方法的精度和穩健性較差,而GRNN方法仍可以較好地實現距離估計。在實際應用中,GRNN 方法需要獲得一定數量的陣列實際測量數據來訓練網絡,無需海洋環境參數,有著較好的可行性和穩健性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
兒童故事畫報(2019年5期)2019-05-26 14:26:14
光學精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年2期)2016-03-22 02:42:52
核科學與工程(2015年4期)2015-09-26 11:59:03
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
