基于優化減載與動態慣量控制的DFIG參與系統一次調頻研究
2021-09-25 02:44:36彭耀輝章林煒邊曉燕李東東
可再生能源 2021年9期
徐 波,彭耀輝,章林煒,邊曉燕,李東東
(上海電力大學 電氣工程學院,上海 200090)
0 引言
大規模風電并網使電網調頻能力下降,影響電網的穩定性[1],[2]。由于風電機組大多運行在最大功率跟蹤(MPPT)模式下,風電機組與電網解耦運行時,無法響應系統頻率變化[3]。虛擬慣性控制可以有效提高風電機組的調頻能力[4],[5],但虛擬慣性控制是利用轉子動能參與系統調頻,過多釋放轉子動能容易使風電機組轉速過低,影響其穩定運行。同時,風電機組調頻能力受其運行狀態影響,波動性較強。
為提高風電機組調頻能力,有關學者提出了超速減載控制策略[6]。文獻[7]采用固定10%減載率并結合虛擬慣性控制,提高了風電機組調頻能力,但固定減載率靈活性較差,高風速時效率較低,且減小了風電機組的有功出力。文獻[8]通過優化算法,根據風速變化動態調整風電機組減載率,具有一定的靈活性,但其減載率選擇的合理性有待驗證。以上文獻減載率的選擇均未考慮系統運行狀態,無法根據系統運行狀態動態調整。
本文提出了一種風電機組優化減載方法。正常運行時,若系統負荷過高,風電機組采用較小減載率,以增大有功輸出。若系統負荷較低,采用較大減載率,以減小有功輸出。系統受到擾動時,根據系統頻率變化動態調整風電機組減載率,調整風電機組有功儲備,參與系統調頻。針對風電機組的慣量水平,本文提出了風電機組動態慣量控制方法,風電機組可以根據其運行狀態動態調整虛擬慣性系數。本文方法能夠根據系統運行狀態動態調整風電機組減載率,提高了其參與系統調頻的靈活性和系統頻率穩定性,還提高了風電機組調頻能力,并能根據風電機組運行狀態適當參與系統調頻。
1 風電機組模型
本文基于雙饋風電機組進行研究。根據空氣動力學模型,風電機組捕獲的風能功率為[9]

式中:Pm為風電機組功率;ρ為空氣密度;Sw為葉片的掃掠面積;CP為風能利用系數;v為風速;λ為葉尖速比;λopt為運行在MPPT模式下的葉尖速比;β為槳距角;ωr為葉片旋轉角速度;R為葉片半徑。
風電機組的搖擺方程為[10]

式中:Hwt為機組等效物理慣性時間常數;Tm為機械轉矩;Te為電磁轉矩。
2 優化減載控制
2.1 系統正常運行時優化減載控制
2.1.1 各風速下減載率優化求取
本文所提控制策略針對中、低風速(v=6~12 m/s)進行研究,超速減載控制在一定程度上能提高風電機組調頻能力[11],但定減載率控制在實際應用中缺乏高效性與靈活性[12]。目前變減載率大多通過離線計算獲得,在系統運行狀態發生變化時,固定的減載率不再合適。因此,減載率應根據系統運行狀態動態調整。
超速減載控制原理如圖1所示。A點為最大功率跟蹤運行點,B點為在一定減載率下的超速減載運行點。超速減載控制使得風電機組有功輸出減少,但增加了轉子轉速,風電機組旋轉動能增加。

圖1 某風速下超速減載示意圖Fig.1 Over-speed deload control
當風電機組運行在超速減載點(B點)時,風電機組轉子動能增加量為

式中:ωd為待優化求取的超速減載控制下風電機組轉速;ωopt為MPPT模式下風電機組轉速。
設風速采樣時間間隔為T,本文取10 s。假設時間T內風速保持不變,則Popt與Pd均保持不變。在此期間因超速減載造成的發電量損失 ΔEs為

式中:Popt為MPPT模式下風電機組有功輸出;Pd為減載控制下風電機組有功輸出。
將轉子動能增加 ΔEk視為減載控制帶來的收益,而 ΔEs為所需成本。由此可以建立最優化目標函數為

式 中:γk,γs為 權 重 系 數。
為提高風電機組發電率和調頻能力,在中風速 時(v=8~12 m/s),風 電 機 組 調 頻 能 力 較 高,應 盡可能提高其發電率,γk取0.5,γs取0.5。在低風速時(v=6~7 m/s),風 電 機 組 調 頻 能 力 較 弱,發 電 量較少,應盡可能調高其調頻能力,γk取0.7,γs取0.3。風電機組固有物理慣量Jwt,槳葉掃過面積Sw,槳葉半徑R等相關參數可從風電機組參數表中獲得,空氣密度ρ為已知值。
在不同風速下分別求取各優化參數,其約束條件為

本文采用粒子群優化算法對式(7)進行求解。粒子群算法最早由Eberhart和Kennedy在1995年提出,它源于對鳥類覓食行為的研究,模仿鳥類覓食過程進行最優化求解[13]。與遺傳算法相比,粒子群優化算法更高效,使用求解函數數量更少[14]。
通過優化算法可求得風電機組超速減載后的角 速 度 ωd,進 而 通 過 式(1)~(3)可 推 導 出 此 時 有功輸出Pd,則風電機組減載率為

改變風速,重復上述過程,求得不同風速下風電機組最優減載率。風速v和減載率d'的關系如圖2所示。

圖2 不同風速下減載率Fig.2 Over-speed deload rate at different wind speed
2.1.2 不同負荷水平下風電機組減載率動態調整
傳統變減載控制并不考慮系統負荷情況,靈活性差,發電效率低。本文考慮了系統負荷情況,優化調整風電機組減載率。系統負荷較小時采取高減載率,從而減小風電機組出力、增加有功備用;而負荷較大時采用低減載率,從而增加有功輸出。
目前,系統負荷情況可以通過負荷預測方法獲得[15]。假設通過負荷預測得到日負荷曲線中未來某一時刻系統瞬時負荷為PL,該日平均負荷為Pav,定義系統負荷比為

考慮系統負荷時,風電機組減載率為

綜合考慮風電機組運行狀態和系統負荷情況,確定風電機組減載率的流程如圖3所示。

圖3 不同風速下減載率取值流程圖Fig.3 De-load rate calculation flow chart
由圖3可知,通過考慮系統實時負荷水平,動態調整風電機組減載率,既增強了風電機組調頻能力,又提高了發電效率。
2.2 系統受到擾動后減載率動態調整方法
當系統受到擾動后,傳統虛擬慣性控制利用風電機組轉子動能,進行短時間的頻率調整,但過多地釋放轉子動能容易使風電機組過度響應,影響其穩定運行[3]。系統受到擾動后,本文所提方法通過動態調整 λ值,以改變風電機組減載率。進而調整有功儲備,使風電機組參與系統一次調頻,為系統提供較長時間尺度的有功支撐。
根 據 式(1)~(4)可 以 推 導 出 減 載 率d與 葉 尖速比 λ之間的關系。進而,由圖2可得葉尖速比 λ與風速v間關系。
系統受到擾動后,葉尖速比動態調整為

式中:λd為減載控制下風電機組葉尖速比,其隨風速與系統負荷變化,經過每次采樣不斷更新;Δλ為隨系統頻率變化而動態調整的葉尖速比。

頻率偏差與葉尖速比偏差間關系為式中:λopt為MPPT模式下葉尖速比,通常為8.1;Δfmax為系統安全運行范圍內允許的最大頻率偏差,系 統 容 量 較 小 時,Δfmax=±0.5 Hz[16]。
系統受到擾動后,減載率動態調整過程中風電機組有功與轉速變化如圖4所示。

圖4 減載率動態調整過程Fig.4 Dynamic adjustment process of load shedding rate
由圖4可知,當系統負荷增加導致頻率下降時,頻率調整為A→A'→A的過程。A→A'過程中 λ值減小,從而減載率降低,增大了風電機組有功輸出。同理,當系統負荷減小時頻率調整為A→A″→A的過程。
3 風電機組動態慣量控制
通過控制葉尖速比調整風電機組減載率,為系統提供較長時間的有功支撐,并且不會出現風電機組過度響應現象。但擾動初期頻率偏差往往較小,無法提供較大的有功支撐,未能充分發揮其調頻能力。因此,還須要動態慣量控制相配合,共同響應系統頻率變化。
根據式(4)可以推導出虛擬慣量控制在單位時間內,風電機組旋轉動能變化量為

式中:ωr為風電機組旋轉角速度。
在虛擬慣量控制過程中可以近似認為,風電機組動能變化量全部轉化為系統電能。即:

把 式(14)代 入 式(15),兩 邊 同 時 積 分 可 得 虛擬慣性系數Kinertia與風電機組固有慣性時間常數間關系為

優化變減載率和動態慣量控制原理如圖5所示。

圖5 優化變減載率和動態慣量控制原理圖Fig.5 Optimized load shedding and dynamic inertia control
4 仿真驗證
在Matlab/Simulink中搭建兩區域電力系統,如圖6所示。區域1含有由310臺1.5 MW雙饋式風力發電機組成的風電場和900 MW同步發電機G2。區域2含有兩臺900 MW同步發電機G3,G4。所有風電機組的減載率均按照前文提出的方法設置,并參與系統一次調頻。t=50 s時,在區域間設置負荷擾動為LD=300 MW。

圖6 兩區域仿真系統Fig.6 Two areas simulation system
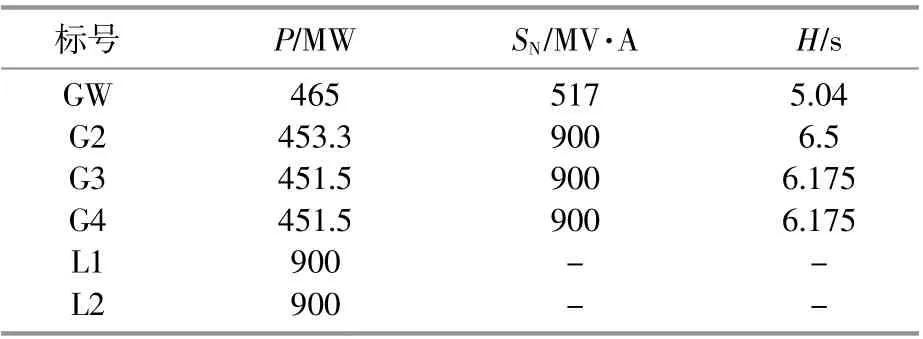
表1 仿真主要參數Table 1 Simulation parameters
為了驗證本文的控制方法,分別考慮不同負荷、不同風速工況。同時,將本文所提控制方法(ODRIC)與以下3種控制策略進行了對比分析。①策略A為無減載控制,無虛擬慣性控制;②策略B為無減載控制,傳統虛擬慣性控制;③策略C為10%定減載控制,優化、自適應系數控制[17]。
虛擬慣性控制原理如圖7所示[18]。本文KH=15,KD=20。

圖7 傳統虛擬慣性控制原理圖Fig.7 Traditional virtual inertia control
4.1 不同負荷下仿真驗證
本文提出的控制方法先優化求取各風速下最優減載率;再根據系統負荷情況,調整風電機組的減載率,使減載率能夠隨系統負荷靈活變化,進而提高其調頻能力和發電效率。分別在系統輕載與重載兩種工況下進行仿真分析。
4.1.1 系統輕載時
仿真設置風速固定為10 m/s,按式(10)設置l為94%。仿真并記錄數據。輕載時系統頻率、風電機組出力和轉速變化如圖8所示。由圖8可以看出,正常運行時,由于此時系統負荷水平較低,本文方法ODRIC通過提高風電機組減載率,既提高了風電機組轉速與有功備用,又減小了系統頻率偏差。在系統輕載時,在ODRIC控制下,風電機組具有更高的減載率,因此具有更高的調頻能力。t=50 s時系統受到擾動,ODRIC能根據風電機組運行狀態,動態調整風電機組減載率和虛擬慣性系數,提供更多的有功支撐,系統具有更小的頻率偏差。


圖8 風速為10 m/s,l=94%時仿真結果Fig.8 Simulation results at wind speed 10 m/s,l=94%
4.1.2 系統重載時
調整系統負荷比l=106%,保持風速與擾動大小不變。同樣可以得到系統頻率、風電機組出力和轉速變化如圖9所示。
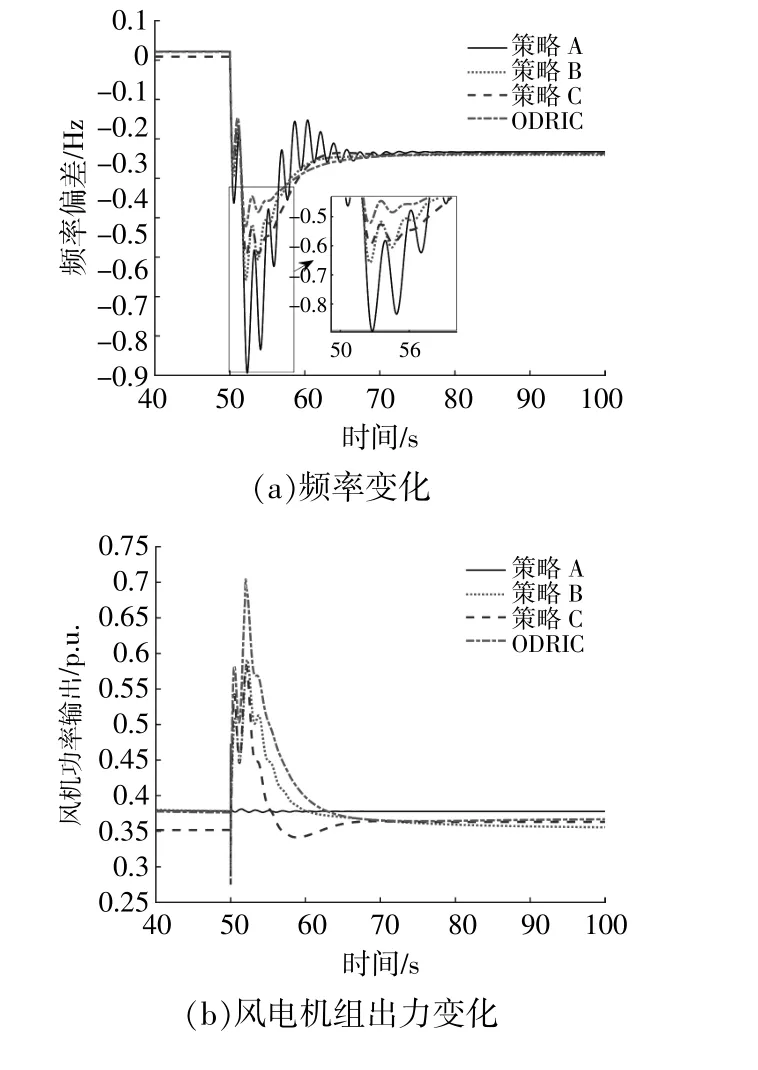

圖9 風速為10 m/s,l=106%時仿真結果Fig.9 Simulation results at wind speed 10 m/s,l=106%
由圖9可知,正常運行時,由于系統重載,本文方法ODRIC將采取較小的減載率,增大風電機組有功輸出。此時,相比其他控制策略,ODRIC使系統具有最小的頻率偏差。在ODRIC控制下,風電機組轉速較高,具有較高的調頻能力。在系統受到擾動后,ODRIC能夠充分釋放風電機組存儲的有功,減小頻率偏差。
4.2 不同風速下仿真驗證
不同風速下,風電機組調頻能力不同。為了驗證在不同風速下,本文所提控制方法的有效性和優越性,仿真分別采用中風速(10 m/s)和低風速(7 m/s)兩種情況進行驗證。
4.2.1 中風速時
設置風速為10 m/s,l=100%。擾動大小保持不變,仿真結果如圖10所示。

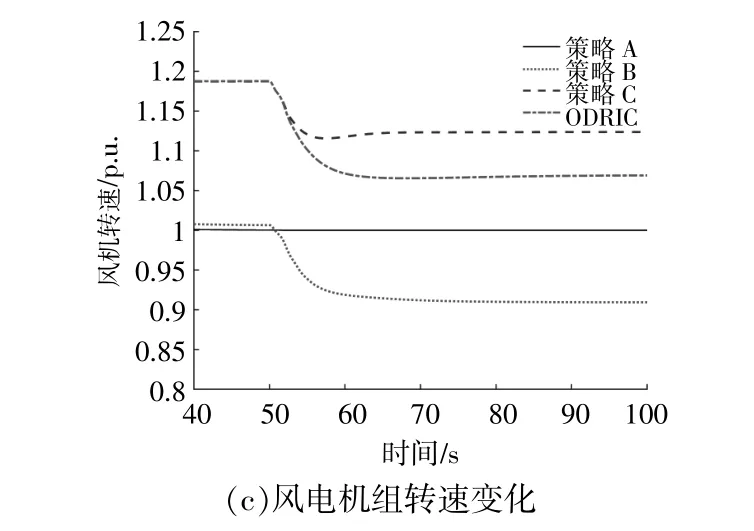
圖10 風速為10 m/s,l=100%時仿真結果Fig.10 Simulation results at wind speed 10 m/s,l=100%
由圖10可以看出,本文方法可以根據風電機組運行狀態充分地發揮風電機組調頻能力,頻率波動小,使系統具有更小的故障率以及頻率偏差。
4.2.2 低風速時
設置風速為7 m/s,l=100%。擾動大小保持不變,仿真結果如圖11所示。

圖11 風速為7 m/s,系統l=100%時仿真結果Fig.11 Simulation results at wind speed 7 m/s,l=100%
由圖11可知,當風電機組運行在低風速時,其轉速較慢,調頻能力較低。由于策略B采用固定調頻系數,過度響應頻率變化。在系統受到擾動數秒后,出現負的有功支撐,極易引起頻率的二次跌落,威脅系統頻率穩定。策略C為保證風電機組穩定運行,優化調整風電機組調頻系數。這種方法過于保守,風電機組提供的有功支撐過低,反而增加了系統頻率偏差。
ODRIC在低風速時具有較高的減載率,使風電機組運行在較高轉速下。同時,系統受到擾動后,通過適度釋放轉子動能,風電機組能夠平滑、連續地提供有功支撐。
5 結論
本文提出了一種風電機組優化減載與動態慣量控制方法。該方法能動態調整風電機組減載率,可以根據風電機組轉速動態調整動態慣量。與傳統虛擬慣性控制方法相比,本文方法可以有效防止風電機組調頻過程中過度響應,有效防止頻率的二次跌落。最后,通過不同風速、負荷水平等工況下的仿真表明:系統正常運行時,本文方法能根據系統負荷水平和風速動態調整風電機組減載率。提高了風電機組調頻能力,又減小了系統頻率偏差。擾動發生后,本文方法能夠根據風電機組運行狀態,動態調整風電機組減載率與動態慣量控制系數。保證風電機組穩定運行的同時,為系統提供更大、更持久的有功支撐。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
電機與控制應用(2021年12期)2021-02-28 07:55:52
海洋通報(2020年5期)2021-01-14 09:26:54
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
西南交通大學學報(2016年4期)2016-06-15 20:29:37
電測與儀表(2015年8期)2015-04-09 11:50:06
