一種輸電線路的智能多功能除冰機器人的設計與實現
2021-09-25 09:07:19穆聰火久元劉釗文張晶趙志祿
科技風 2021年24期
穆聰 火久元 劉釗文 張晶 趙志祿

關鍵詞:輸電線路;除冰;嵌入式系統;結構設計
2008年初,我國南方發生的大范圍惡劣低溫雨雪冰凍天氣給輸電線路帶來了巨大的損毀和經濟損失,尤其長距離輸電線路當處于雨雪冰凍等極端災害下會顯得極度脆弱。大部分地區的輸電線路上出現了冰閃跳閘、變電站停運、設備損毀、桿塔倒塌等事故。供電中斷給生產生活帶來了嚴重影響。我國是一個輸電用電大國,如何加強和改善輸電線路在冰凍極端災害條件的抗災害能力,加快研究有效的輸電線路除冰技術,最大限度地避免和防止冰凍災害對輸電線路造成的危害成為國內外一個重點研究的問題。
現有的除冰方式主要包括人工外力敲打法、大電流熱熔法等,但是上述方法受到技術、成本和人員安全性等因素的極大限制。隨著嵌入式系統和物聯網技術的發展,通過采用智能化的除冰機器人替代原有除冰方式成為可能。與原有傳統的人工除冰法和大電流熱熔除冰法相比,采用智能機器人具有高效、無人員安全隱患,長距離全天候工作等優勢,因此多功能智能除冰機器人成為特種機器人研發工作的重要方向。目前,針對輸電線路的機器人主要用于輸電線路的巡檢工作。線路巡檢機器人的研發工作雖然始于日本,但緊隨其后美國、加拿大等發達國家相繼開展了針對于巡線機器人的研發。
我國的巡線機器人始于20世紀90年代,起初的研究針對于巡線領域,對線路除冰機器人工作并未大幅度開展。文獻中介紹了加拿大魁北克水電研究院于2000年研制的LinerROVER遙控小車,該小車可以清除短距離線路上的少量覆冰。文獻介紹了山東電力研究院與加拿大魁北克水電研究院合作研發了LinerRover小車的升級版,升級版小車在遠程通信控制等方面得到了提升。后期湖南大學聯合國防科大、武漢大學等多家單位也對除冰機器人展開了研發工作。但是由于在一些冰凍災情嚴重的環境下,現有的機器人在功能、結構、遠程通信、控制等方面還是無法滿足用戶方需求。文獻介紹一種利用破冰錐的特殊結構用來除冰,但當破冰錐過長就會割傷線路,破冰錐過短則會影響到除冰效果。文獻中的方案考慮到破冰效果,但是冰層的厚度對刀頭的尺寸有嚴格的要求。基于以上工作并結合分析,設計一款智能高效的除冰機器人是非常有意義的。
1智能除冰機器人設計思路
本文舍棄國內傳統除冰控制的各類方案,采用由光伏組件組建的太陽能供電的智能長距離無線控制除冰機器人。除冰機器人使用嵌入式控制結合機械自動除冰,具有在極端冰凍災害的環境下工作的能力。智能除冰機器人機體結構主要由除冰結構、控制系統、運動系統、通信系統及動力提供系統五個部分構成。除冰結構是利用四旋翼無刷電機進行覆冰清除;控制系統部分是利用主控制器和擴展板與編程實現;運動系統通過可調節滑軌、步進電機、凹槽滑輪三大結構組成。通信系統借助無線模塊和定位模塊實現了機器人的遠程通信、定位等功能,配合搭載有攝像頭的無線傳輸系統實現了機器人在工作狀態下對輸電線路及周圍環境的監控,除此之外在動力提供系統利用太陽能光伏組件供電提高續航能力。最后智能除冰機器人以電子機械實物的方式展現,能夠完成輸電線路周圍環境監測、遠程通信與控制、太陽能供電并保證移動速度及平穩性等各項性能的運行。從而形成一系列除冰工作的機、電、儀一體化系統。
2關鍵技術研究
智能除冰機器人是電子、通信、計算機、機械多學科交叉的產物,由于國內外至今尚無成熟的技術與方案,但是由于應用環境的特殊與復雜導致技術實現存在一些問題,需要研究的關鍵技術如下。
2.1無損傷除冰結構
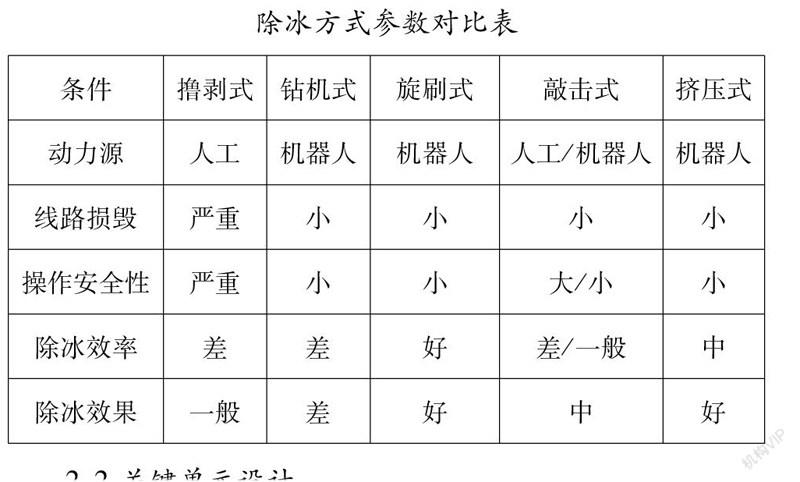
智能除冰機器人的核心功能是高效的除去輸電線路上的覆冰的同時,不損傷輸電線路不影響輸電線路的正常運行同樣需要考慮。通常在冰雪災害發生時覆冰形狀為依附輸電線路形狀成“一”字形延展,除冰方式有擼剝式,鉆擊式和旋鉆式等。本文設計了四旋翼無刷電機葉輪旋轉進行覆冰清除。
擼剝式主要被用于人工除冰工作,工作人員在輸電線上套掛環裝物,下發進行拖拽。除冰效率低且效果一般,除冰過程中易造成電纜的損毀,與此同時易造成工作人員觸電、磕碰、跌落等安全事故。依據動力,對線路損毀、安全性、除冰效率、除冰效果四個參數的對比,可以得出電機旋刷式的優勢。對比情況見下表:
2.2關鍵單元設計
2.2.1主控制器單元
由于所需的數據量大且對運算速率有嚴苛的要求,本文選擇Arduino系列的Mega2560作為主控制器,相比于其他主控制器,Arduino Mega2560具有多I/O接口,兼容Arduino UNOR3設計擴展板等諸多優勢。本文采用的第三版Arduino,相比與其他有以下特點:
(1)在AREF處增加了兩個管腳SDA和SCL,支持12C接口;增加IOREF和一個預留管腳,將來擴展板將能兼容5V和3.3V核心板。
(2)改進了復位電路設計。
(3)USB接口芯片由ATmegal6U2替代了ATmega8U2。
2.2.2無線模塊單元
本文采用NRF24L01無線模塊,在2.4GHz一2.5GHz ISM頻段工作。模塊內置:頻率合成器、功率放大器、晶體振蕩器、調制器等功能模塊,并融合了增強Shock Burst技術,其中輸出功率和通信頻道可通過程序進行配置。
NRF24L01的優勢在:
(1)功耗低,在以6dBm的功率發射時,工作電流只需要9mA;接收時,工作電流只有12.3mA。
(2)具有多種低功率工作模式。
(3)在數據傳輸方面實現相對Wi-Fi距離更遠。
2.2.3電機驅動單元
為了保證足夠的動力,機器人車體部分采用四驅方式。本驅動采用的是大功率驅動芯片BTS7960組成的H橋驅動模塊,采用74HC244芯片有效隔離主控制器與電機驅動。本驅動模塊具有過流過熱保護功能,且雙BTS7960H橋驅動模塊電路具有強勁的驅動和剎車效果。
猜你喜歡
建材發展導向(2023年6期)2023-03-31 02:51:38
房地產導刊(2022年5期)2022-06-01 06:20:14
建材發展導向(2021年13期)2021-07-28 07:15:50
中國科技博覽(2016年22期)2016-11-01 18:19:47
中國科技博覽(2016年19期)2016-10-19 13:11:05
科學與財富(2016年28期)2016-10-14 20:23:24
科學與財富(2016年28期)2016-10-14 04:19:29
科學與財富(2016年28期)2016-10-14 03:48:23
科學與財富(2016年28期)2016-10-14 00:42:58
專用汽車(2016年5期)2016-03-01 04:14:49