基于自主診斷重構技術的航天器故障檢測系統設計
2021-10-08 02:22:32萬磊,戴濱,蔣寒
計算機測量與控制 2021年9期
萬 磊,戴 濱,蔣 寒
(1.浙江省渦輪機械與推進系統研究院,浙江 湖州 313219;2.浙江大學 航空航天學院,杭州 310058)
0 引言
多顆航天器協同工作是目前航天領域常見的工作模式,航天器集群發生單體故障而導致的任務失敗問題,一直是國內外研究的熱點。傳統的故障診斷方法依賴于數據驅動、分形維數以及故障樹等技術,在應用過程中的效果均不理想,且檢測精度較低,無法滿足應用需求[1-2]。
為此,本文設計了一種基于自主診斷重構技術的航天器故障檢測系統,完善系統的硬件設備,介紹了系統的檢測器、采集器、濾波器以及電源電路等主要硬件模塊,并結合小波函數和神經網絡,設計出一種全新的小波神經網絡,對采集數據集進行數據訓練,預測出真確的航天器飛行姿態角,從而進行精確的故障檢測,并提出了故障重構措施,進一步保證航天器集群順利完成任務。最后經過實驗,進一步驗證了該系統的應用性能,從而促進了自主診斷重構技術的進一步發展和應用。
1 基于自主診斷重構技術的航天器故障檢測系統設計
1.1 系統設計原理
航天器故障檢測系統分為硬件設備設計與軟件算法。硬件設備設計采用EEC-I型檢測器進行交流信號的監控、采用基于MATLAB的數據采集器進行數據的采集、采用FIR濾波器進行對數據的轉換,最后采用4NIC-UPS27型號一體化不間斷電源為航天器的飛行提供電力;軟件部分融入神經網絡和小波函數,預測航天器的姿態角的安全閾值,同時引入了故障檢測算法,實現航天器故障的自主判斷。
1.2 系統設計整體構架
本文設計的基于自主診斷重構技術的航天器故障檢測系統由檢測器、采集器、濾波器以及電源四部分組成,基于自主診斷重構技術的航天器故障檢測系統構架如圖1所示。
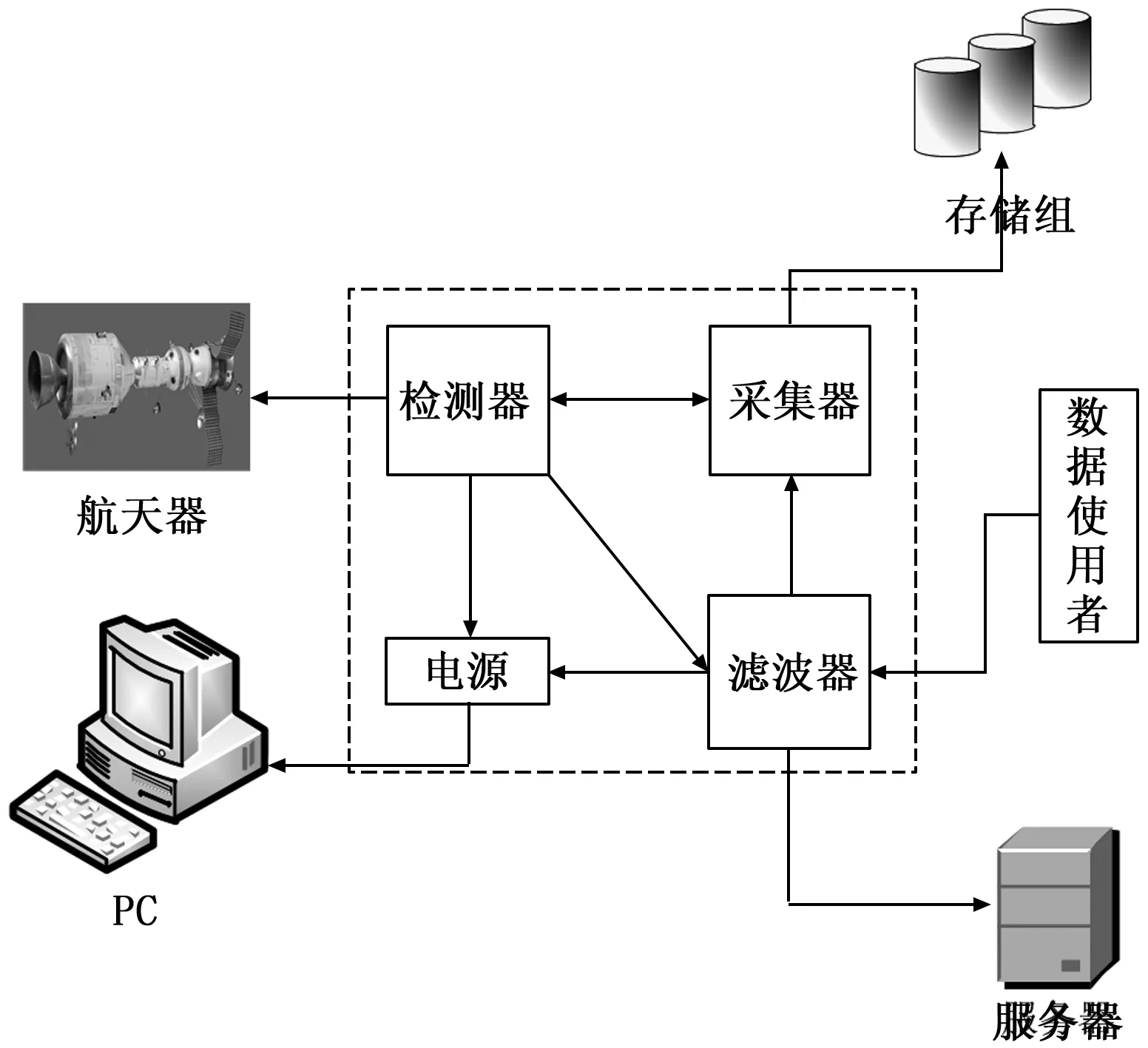
圖1 基于自主診斷重構技術的航天器故障檢測系統硬件
1.3 檢測器
為提升航天器的使用和維修的方便性,設計故障檢測器檢測航天器的工作狀況,本文采用EEC-I型檢測器對航天器的交流信號進行監控,并探測故障信號來源鎖定故障部位。EEC-I型檢測器具有統一的16幀故障診斷連接器,兼具數據傳輸及通訊功能,且為便于控制系統識別故障信息,采用統一的故障碼含義,除了國際通用故障碼外,允許開發商自定義故障碼,并可隨時消除檢測器的故障碼功能[3-4]。檢測器結構如圖2所示。
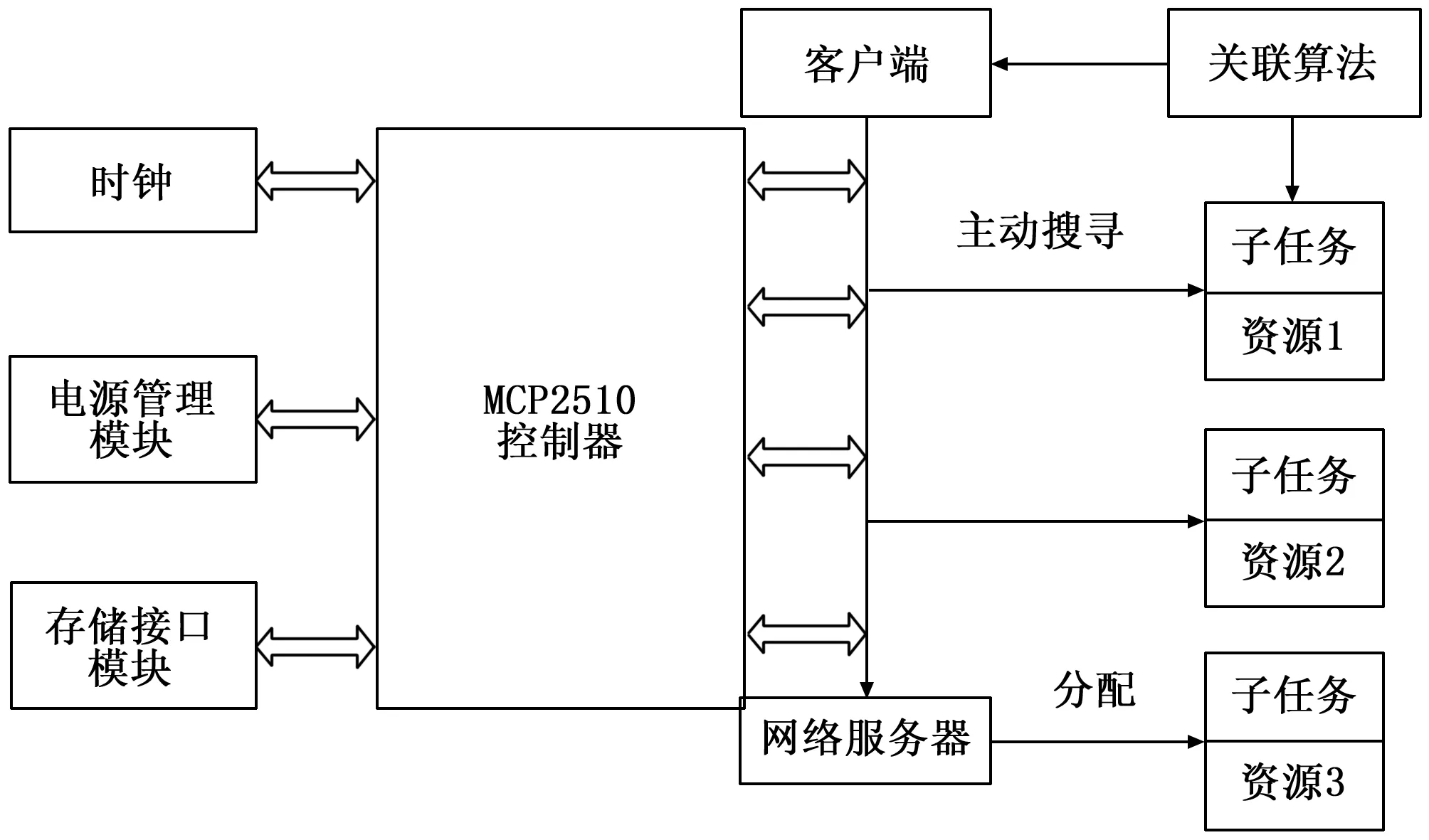
圖2 檢測器結構
觀察圖2可知,本文設計的檢測器內部為MCP2510控制器,客戶端與網絡服務器連接,通過關聯算法搜尋和分配子任務[5]。MCP2510控制器通過SI接口與MCU進行數據傳輸,為了保證控制器的正常運行,其工作電壓控制在2.5~5.5 V內、電流控制在0~5 mA內。存儲接口選用PCIE進行數據的存儲;時鐘選用20 MHz有源晶振型號,為電源提供電壓,供給各個端口。當航天器正常運行時,系統內部的輸入和輸出信號的電流或電壓在某一固定范圍內均勻變化,而當航天器出現異常故障時,控制電路信號的電流或電壓出現急劇異常變化,且數值往往超出固定范圍,若該現象的存在時間長于兩個信號交換周期,則航天器的電子控制系統認為航天器出現故障,并將故障信息轉化為故障代碼存儲入控制系統的存儲器,同時進行故障警報,顯示故障信息[6]。
1.4 采集器
采集器是獲取航天器故障信息重要的數據來源。傳統航天器故障檢測系統應用的數據采集器,往往只具備數據采集功能,無法對數據進行分析和處理,增大了數據處理模塊的工作量,不利于提升航天器故障診斷效率。為此,本文設計了一款基于MATLAB的數據采集器,采集器具有6個硬件端口,可使用移動設備對其進行數據提取和讀寫操作,同時采集器具有12個數據采集端口,增大了航天器故障檢測系統的數據采集量。采集器端口如圖3所示。

圖3 采集器端口
采用MATLAB設計采集器,為采集器提供應用程序接入端口,應用程序接入端口選用Telnet,實現采集器端口的通信。用戶可以在MATLAB環境中采用c語言、Java等編譯語言進行程序編寫,實現采集器的數據處理功能,用顯示屏實時顯示采集到的數據,再對采集數據進行一系列的關聯分析、數據分類等操作,也可以利用數據采集工具箱,調用函數命令,直接控制采集器與PC端進行通信,同時便于采集器與其他服務器建立關系,進一步增強數據擴展性[7-8]。
1.5 濾波器
由于采集器采集的數字信號的頻率多種多樣,因此在檢測系統中只有一個采樣頻率難以滿足應用需求,為實現數字信號的數模轉化,設計了FIR濾波器根據沖擊響應函數的時域特性進行數據的采樣率轉換,且在轉化過程中保證數據的完整性[9-10]。
FIR濾波器主要由乘加單元組成,傳統的濾波器采樣直觀式結構進行構造,易造成資源面積占用過大,影響濾波器的數據轉化效率。而本文利用FPGA硬件構造FIR濾波器,采用串行結構將需要的轉換的數據信號與其對應的濾波系數進行相乘,而且為便于清除計算的誤差,在完成一級乘法運算后,鎖定該層次的運算結構,之后一級的乘積累加,不僅能夠節約數據資源,且能夠提升數據轉化速度,為了降低對信號的衰耗,將濾波器的通帶范圍設置為0.3~0.5 pi之間、阻帶設置為1.5~4 kHz之間,指定5%的通帶紋波和40 dB的阻帶衰減。FIR濾波器主要包含存儲模塊與運算模塊兩部分,運算模塊完成數據的相乘而累加,而存儲模塊的作用是通過時鐘控制片選信號和地址譯碼,查找并讀寫出與ROM地址相對應的數據,將與數據對應的濾波信號和數據同時輸入運算模塊[11-12]。
1.6 電源設計
電源模塊是航天器故障檢測系統的電能來源,在航天器故障檢測系統中,設計交流電源和直流電源兩種電源,即可以使用36V的直流供電形式,也可以采用220 V的交流供電形式,以滿足不同設備的供電需求。且為提升該檢測系統的抗電磁干擾能力,在檢測器下方,采用4NIC-UPS27型號一體化不間斷電源,該電源不僅電容量大、抗干擾能力強、且功率密度大,同時該電源支持0~0.5內的交流電與直流電的快速轉換,當系統選擇電池供電模式時,則可將電池作為主電源進行供電,當選擇其他供電模式時,電池可作為后備電源,以應對系統的突發情況,同時為了保證電源電路的安全,將輸入和輸出電壓設置為220 V。電源如圖4所示。
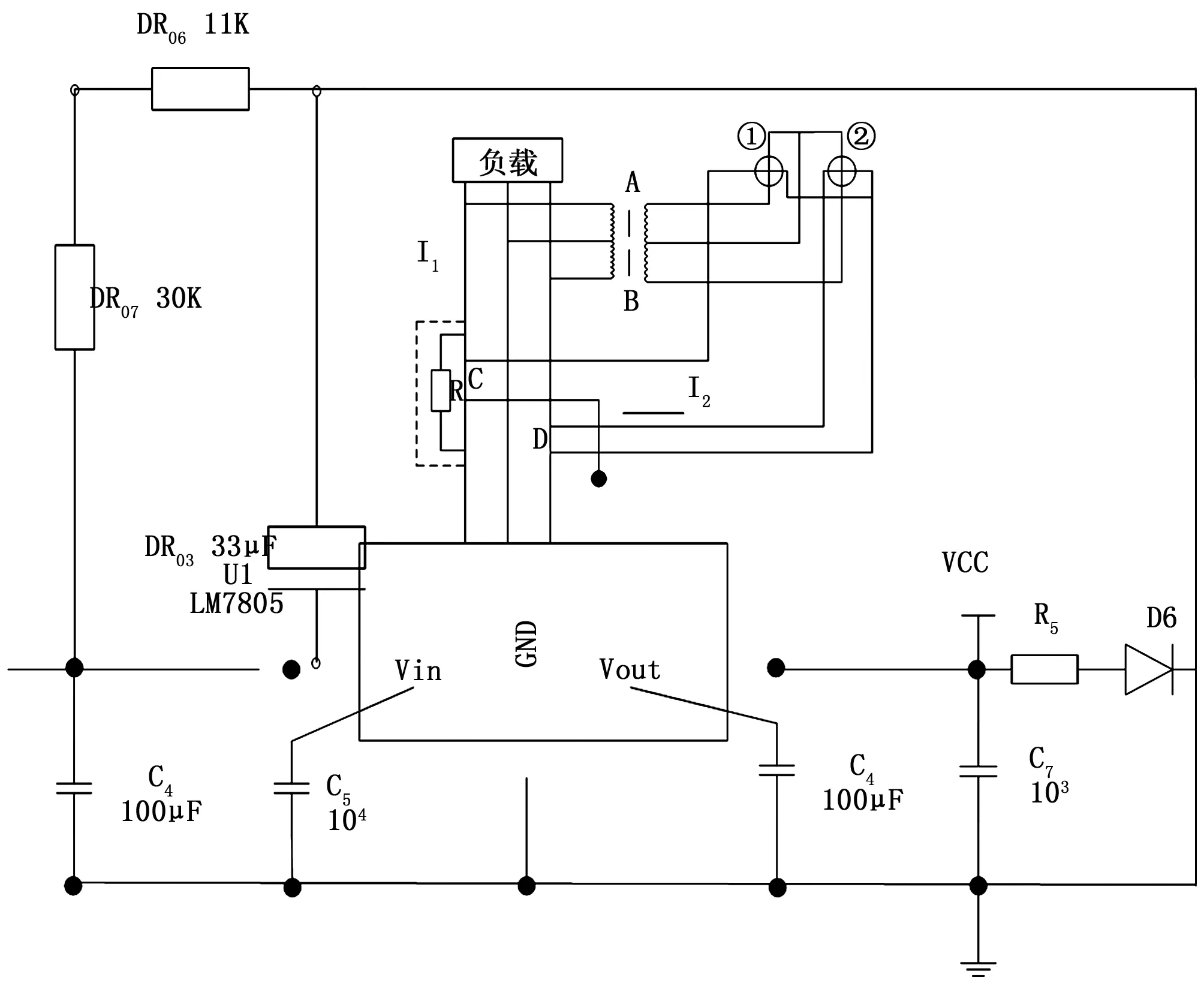
圖4 電源電路圖
2 基于自主診斷重構技術的航天器故障檢測系統軟件設計
在上述硬件設計的基礎上,設計基于自主診斷重構技術的航天器故障檢測系統軟件,具體的流程如圖5所示。

圖5 基于自主診斷重構技術的航天器故障檢測系統軟件設計流程
小波神經網絡的優勢在于充分考慮了神經網絡的結構及小波變換的需求,采用小波函數替代傳統神經網絡隱含層內的S型函數,并且由小波函數的尺度伸縮因子替代輸入層到隱含層的權值,用時間平移因子替代隱含層的閾值,且在這種替換模式下,從實質上將小波神經網絡視為一種連續型的非線性映射,通過融合神經網絡和小波函數,能夠優化兩種算法本身的適應能力和擴展能力,針對局部最小值誤差,具有更強的容錯能力,從而進行更精確的故障檢測[13-15]。
權值連接是小波神經網絡中最為重要的連接方式,同層次神經元的連接及與相鄰層神經元的連接均通過權值進行連接。
本文假設小波前饋神經網絡由輸入層、隱含層以及輸出層三部分構成,小波前饋神經網絡如圖6所示。輸入層和輸出層均為一層,輸入層包含n個神經元,輸出層包含m個神經元,隱含層共有g層且每層包含k個神經元,則小波前饋神經網絡中神經元權值的計算方式如下:
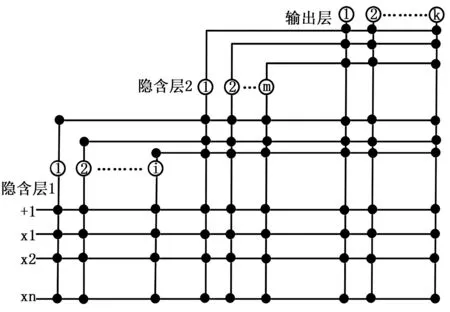
圖6 小波前饋神經網絡結構
φij=1 (j=1)
(1)
φij=xij(2≤j≤n+1)
(2)
φij=Cij(j>n+1)
(3)
(4)
其中:i表示該神經元所在層數;j表示該神經元在i層的位置。
假設小波前饋神經網絡共有L層,則網絡的總輸出如下:
(5)
其中:
(6)
通過上述構建的小波網絡算法對航天器的姿態角數據進行分析,通過訓練網絡預測航天器的姿態角與預測姿態角的殘差是否超過安全閾值,可根據不同類型的姿態判斷出故障位置[16-17],自主診斷重構推理機如圖7所示。但從自主診斷重構技術的推理角度來說,小波神經網絡進行數據訓練時得到的殘差數據分布概率模型p(r丨θ)可以看做是關于參數θ的函數,換個角度說,對于得到的姿態殘差數據,數據訓練中關于參數的所有信息都包含在殘差數據分布概率模型p(r丨θ)中。

圖7 自主診斷重構推理機
根據以上理由,在建立殘差數據分布概率模型p(r丨θ)所使用的殘差數據數據量n充分大時,可以認為獲取的航天器姿態殘差數據的測量過程中以及包含的參數θ的所有信息,此時可以依據,定義置信界100γ%的殘差值滿足如下公式的閾值:
(7)
在利用殘差數據分布概率模型進行航天器故障診斷時,需要對設定的置信界閾值進行重構,在設定的置信界閾值條件下,若其滿足:

(8)
對于殘差數據r,在重構后設定的置信界閾值條件下,若其滿足:
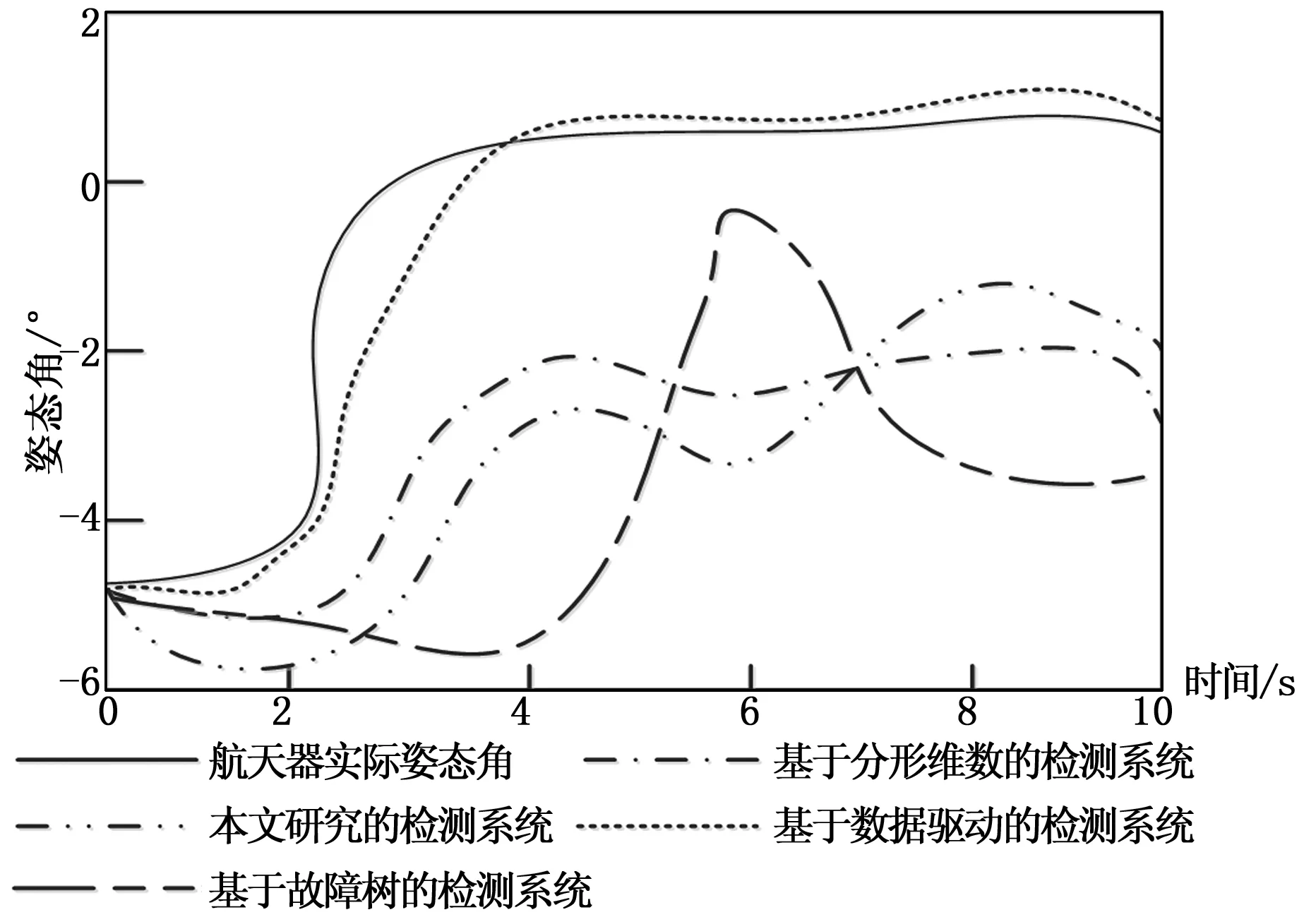
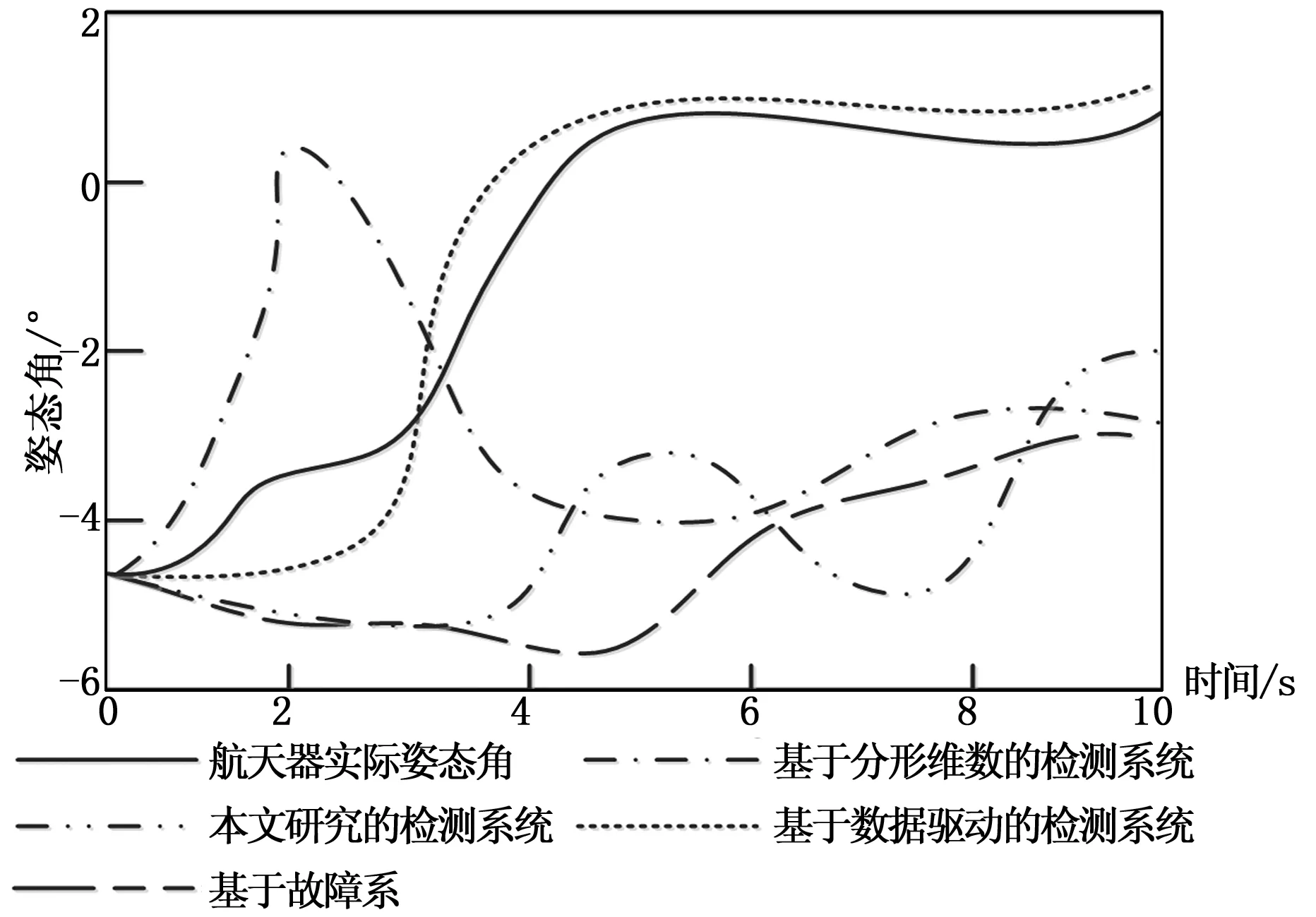
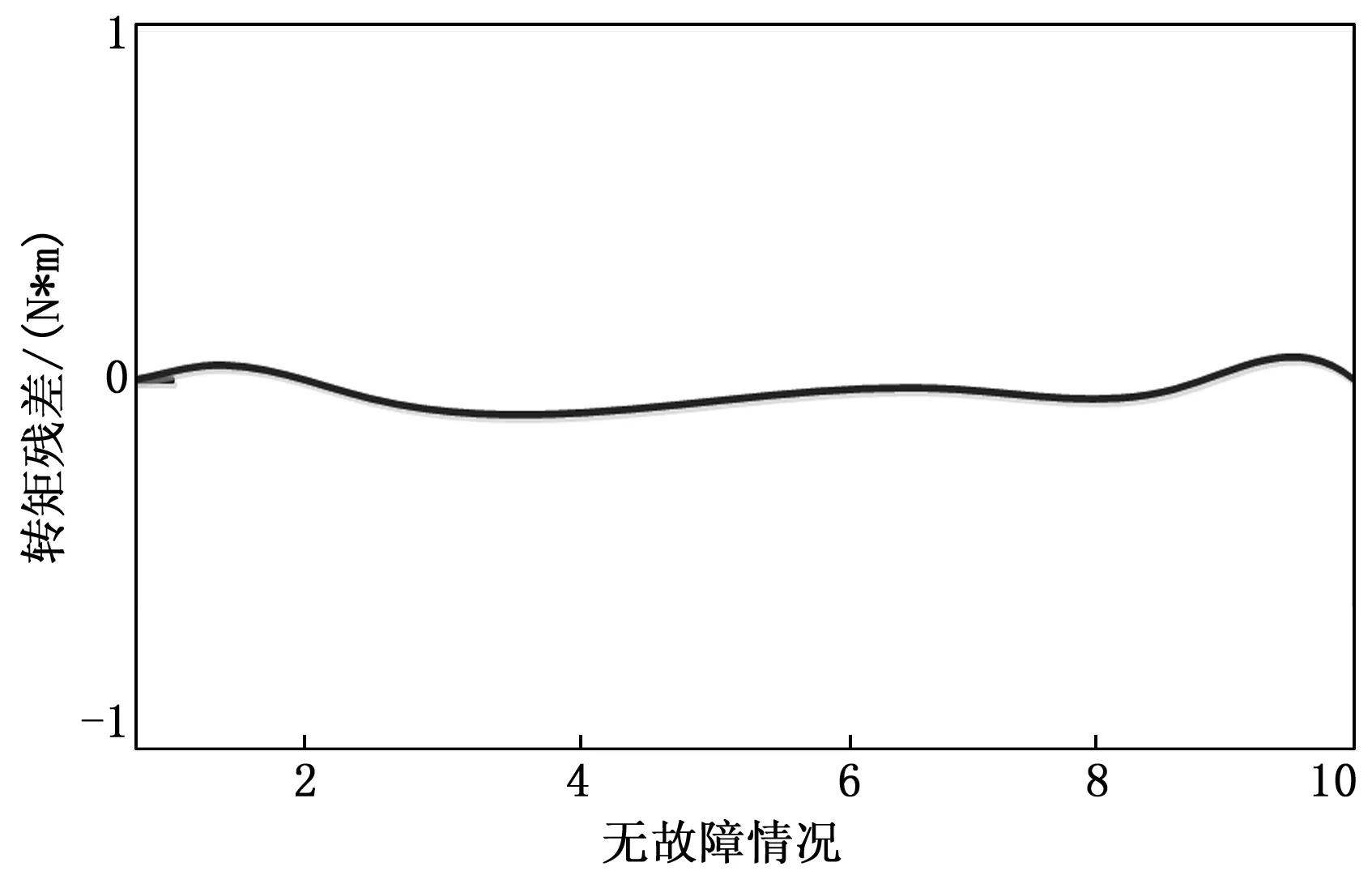
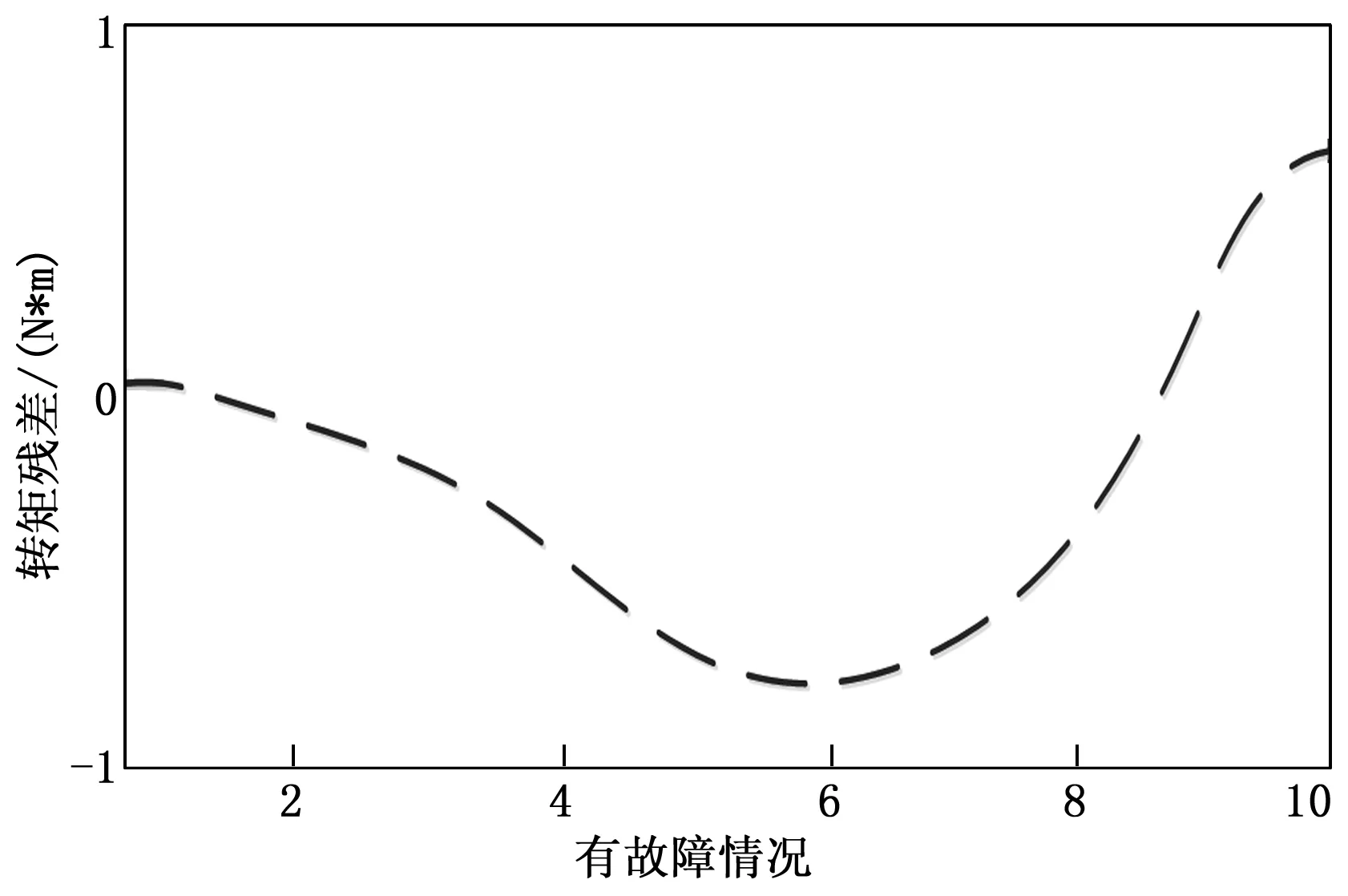
p(rm丨θ) (9) 則可認定該數據為故障數據,根據數據的獲取來源和所屬類別,基于自主診斷重構及時鎖定故障發生位置和基本故障類型,并及時響應故障警報[18-20]。 為驗證本文設計的基于自主診斷重構技術的航天器故障檢測系統的實際應用效果,設計航天器故障檢測仿真實驗進行性能檢驗,將本文設計的故障檢測系統的檢測效果與基于分形維數、數據驅動、故障樹等3種傳統類型的航天器故障檢測系統的檢測效果進行對比,分析4種檢測系統的在線檢測性能。 根據故障檢測系統的運行機理,當航天器發生故障時,檢測系統運用相關網絡算法,對采集的航天器本身姿態角與其相對中心航天的姿態角數據進行分析、計算,預測出正常狀態下航天器的相應姿態角,以此作為航天器故障檢測的依據。 根據以上故障檢測原理,在2.5 s時向X軸執行器注入氣流故障,采用4種故障檢測系統進行故障檢測,4種檢測系統針對航天器X軸、Y軸、Z軸姿態角的預測結果如圖8~10所示。 圖8 航天器X軸姿態角的預測結果 圖9 航天器Y軸姿態角的預測結果 圖10 航天器Z軸姿態角的預測結果 從以上實驗結果可以看出,在注入故障后,本文設計的基于自主診斷重構技術的航天器故障檢測系統所預測的X軸、Y軸、Z軸姿態角與航天器實際姿態角反差較大,能夠有效檢測出故障的產生。而基于分形維數的故障檢測系統針對Y軸的姿態角預測結果較為準確,基于故障樹的故障檢測系統針對Z軸的姿態角預測結果較為準確,而基于數據驅動的故障檢測系統在X軸、Y軸、Z軸均不精確,存在較大檢測誤差。造成以上性能差別的原因在于,本文設計的航天器故障檢測系統應用基于MATLAB的數據采集器進行數據采集,實時獲取航天器的姿態角,且能夠對采集數據進行基礎分析,配合濾波器和檢測器的使用,提升數據轉換效率和檢測精度,同時構建小波神經網絡對姿態角數據進行訓練,對比預測姿態角和實際姿態角的殘差,當殘差值超過設定閾值后,自動診斷航天器故障。而傳統的故障檢測系統,對航天器姿態角的數據采集不夠精確,且不能準確預測出正常運行狀態下航天器的姿態角,降低了檢測精度和檢測效率。 為進一步驗證本文設計的檢測系統的準確性,應用小波神經網絡對注入故障后的航天器進行故障診斷,故障診斷結果如圖11和圖12所示。 圖11 無故障情況診斷結果圖 圖12 注入故障后診斷結果圖 從上述診斷結果可以看出,當2.5 s后,航天器的實際姿態角與系統預測角的殘差突破了閾值范圍,針對系統,在2.5號航天器發生了故障,進一步驗證了本文研究的故障檢測系統的精確性。 經過上述檢測性能對比后,設計故障重構仿真實驗,設計10組航天器集群模擬實驗,分別在航天器集群中某一航天器的不同位置注入不可修復的永久性故障,在采用4種故障檢測系統對上述10組航天器模型進行故障檢測后,對比航天器的后續運行狀態。 根據現場實驗結果,本文設計的基于自主診斷重構技術的航天器故障檢測系統在完成故障檢測后,為避免故障航天器干擾其他航天器的運行,自動采取故障重構措施,即改變航天器的運行路線,自動退出航天器團隊,故障重構任務示意圖如圖13所示。而其他3種檢測系統在檢測出故障后,結束了整體的檢測工作,任由航天器進行發展,由此可以看出,本文設計的故障檢測系統更利于維護航天器集群的運行安全,更能滿足市場需求。 圖13 故障重構任務示意圖 綜上所述,該系統能夠有效進行航天器故障檢測并采取故障重構措施,具有較高的應用價值。 航天器故障的自主診斷和重構的實現大大增強了航天器集群運行的安全性,可以有效減輕航天器測控站的人力投入、資金投資等,并克服了航天器測控的空間限制,并實現了在故障航天器離開集群后,余下航天器重新進行任務分配,繼續完成分配任務,且故障航天器在允許狀態下,可以改變航行路線飛回測控站,且隨著科學技術的精進,航天器的故障檢測和重構技術將融合其他技術,不斷提升數據處理能力和故障恢復能力,最終實現航天器的自主智能控制的自主運行,促進我國航天領域的進一步發展。3 結果與分析


4 結束語
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
汽車維修與保養(2019年7期)2020-01-06 03:30:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
汽車維護與修理(2016年10期)2016-07-10 08:17:41
海峽科技與產業(2016年3期)2016-05-17 04:32:12