地質(zhì)勘探鉆機(jī)鉆探實(shí)時深度測量系統(tǒng)設(shè)計(jì)
2021-10-08 02:22:38袁麗艷
計(jì)算機(jī)測量與控制 2021年9期
袁麗艷
(山東電子職業(yè)技術(shù)學(xué)院,濟(jì)南 250200)
0 引言
目前的建筑、交通施工前期的地質(zhì)勘探技術(shù)中,利用勘探鉆機(jī)鉆孔取樣方法確定地下巖芯信息,在未來相當(dāng)長的時期內(nèi)仍是不可替代的技術(shù)手段。小型鉆機(jī)的實(shí)時深度測量信息是一個重要數(shù)據(jù),但是限于成本等問題,目前小型鉆機(jī)一直都沒有配置此項(xiàng)功能,該類鉆機(jī)基本沒有配套的信息化設(shè)備。而數(shù)據(jù)后期編錄、勘探過程記錄等都需要這一數(shù)據(jù),真正需要的時候鉆探過程中的鉆探深度等信息完全依靠人工記錄,這樣做一方面勘探過程中的人力和物力成本較高、信息滯后,另一方面后期數(shù)據(jù)記錄、整理工作量繁雜且容易出現(xiàn)錯誤,不利于地質(zhì)勘探信息化工作的開展。
利用超聲波技術(shù)、移動互聯(lián)通信等技術(shù),結(jié)合全球定位系統(tǒng)技術(shù)(GPS),研制地質(zhì)勘探鉆機(jī)鉆探實(shí)時深度測量系統(tǒng),在此基礎(chǔ)上建立基于物聯(lián)網(wǎng)技術(shù)的工程勘察智慧云系統(tǒng),可為地質(zhì)勘探工作提供良好的技術(shù)支撐,實(shí)現(xiàn)工程勘探工作由傳統(tǒng)方式向信息化方式轉(zhuǎn)變,可以有效降低地質(zhì)勘探過程的人力、物力成本,減輕地質(zhì)勘探工作者的勞動強(qiáng)度,提高地質(zhì)勘探工作的效率。
1 系統(tǒng)網(wǎng)絡(luò)結(jié)構(gòu)設(shè)計(jì)
本系統(tǒng)面向建筑、交通施工地質(zhì)勘探鉆機(jī)信息化的需求,以STM32處理器為核心,提供了鉆機(jī)鉆孔實(shí)時深度測量與數(shù)據(jù)保存、上傳的新型解決方案。通過深度測量系統(tǒng)實(shí)時測量鉆桿在地面部分的長度,根據(jù)錄入的桿號自動計(jì)算出鉆探深度并通過現(xiàn)場LED屏幕實(shí)時顯示。設(shè)計(jì)出了友好的人機(jī)界面,通過鍵盤本地錄入或者通過客戶端遠(yuǎn)程錄入桿號及桿號對應(yīng)的長度,通過鍵盤添加鉆探所使用的鉆桿并進(jìn)行保存。鉆探深度通過GPRS實(shí)時傳輸?shù)皆品?wù)器,并設(shè)計(jì)了網(wǎng)絡(luò)異常時的降檔處理措施,即當(dāng)網(wǎng)絡(luò)異常時暫時把數(shù)據(jù)保存至本地TF卡中,等網(wǎng)絡(luò)恢復(fù)正常時再重傳。系統(tǒng)總體網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu)如圖1所示。

圖1 系統(tǒng)總體網(wǎng)絡(luò)拓?fù)浣Y(jié)構(gòu)
本系統(tǒng)設(shè)計(jì)參數(shù)如表1所示。
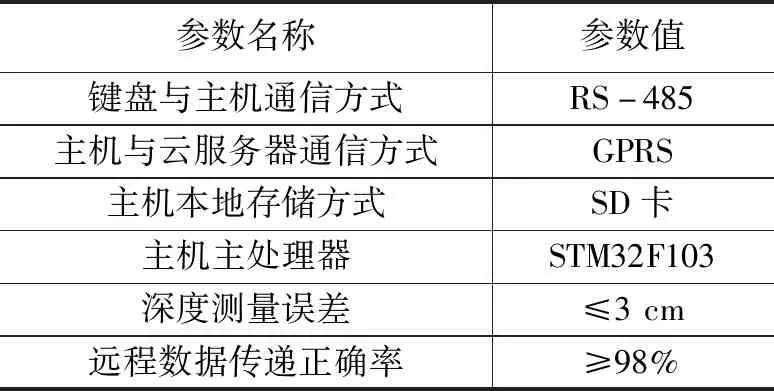
表1 系統(tǒng)設(shè)計(jì)參數(shù)
2 系統(tǒng)硬件結(jié)構(gòu)設(shè)計(jì)
系統(tǒng)基于STM32處理器設(shè)計(jì)嵌入式主機(jī),通過藍(lán)牙模塊和超聲波測距模塊通信。超聲波測距模塊的發(fā)射換能器發(fā)射一定個數(shù)的脈沖信號,超聲波接收換能器接收反射回波信號,并對其進(jìn)行放大、濾波、整形處理,處理結(jié)果通過藍(lán)牙通信的傳輸?shù)浇邮罩鳈C(jī)上,主機(jī)計(jì)算出鉆探深度并在四位LED數(shù)碼管顯示屏上實(shí)時顯示。系統(tǒng)另外配置一個12864的LCD顯示屏用來提供系統(tǒng)設(shè)置等人機(jī)交互接口,無操作時顯示當(dāng)前日期和時間(獲取實(shí)時時鐘芯片數(shù)據(jù))。測量數(shù)據(jù)通過GPRS模塊以TCP/IP協(xié)議傳送到云端服務(wù)器,并提供本地TF卡數(shù)據(jù)存儲功能。系統(tǒng)硬件結(jié)構(gòu)示意圖如圖2所示。

圖2 系統(tǒng)硬件結(jié)構(gòu)示意圖
3 系統(tǒng)模塊設(shè)計(jì)
3.1 主控模塊設(shè)計(jì)
根據(jù)任務(wù)要求,結(jié)合實(shí)際應(yīng)用以及技術(shù)指標(biāo),本系統(tǒng)設(shè)計(jì)采用了ST公司的STM32F103VET6作為主控芯片。它具有低功耗、低成本和高性能等特點(diǎn),提供了時鐘、復(fù)位和電源管理等功能。該款芯片為100引腳,512 kFLASH和64 kSRAM,LQFP 封裝 以及32位Cortex內(nèi)核 ,CPU 工作頻率72 MHz,工作電壓2.0~3.6 V,這里我們采用了+3.3 V電壓供電。芯片上共有五對VSS和VDD,管腳均勻分布在芯片四周,可以為芯片提供最好的電源質(zhì)量,降低電源阻抗,保證高速數(shù)字電路可靠工作。本系統(tǒng)電路在電源引腳附近設(shè)置了去耦電容,以避免電流變化引起的電源電壓波動傳遞到其他電源引腳,起到電源濾波的作用。在實(shí)際的系統(tǒng)功能編程中,ST官方提供了大量安全有效無誤的固件庫函數(shù),加快了開發(fā)和設(shè)計(jì)的速度,提高了開發(fā)的效率。主控模塊基本電路如圖3所示。

圖3 主控模塊電路圖
對于單片機(jī)來說,復(fù)位電路是系統(tǒng)中不可缺少的一部分,復(fù)位操作就是把單片機(jī)正在運(yùn)行的狀態(tài)恢復(fù)到起始狀態(tài)。STM32的F1系列的單片機(jī),支持系統(tǒng)復(fù)位,上電復(fù)位和備份區(qū)域復(fù)位3種方式。本系統(tǒng)設(shè)計(jì)了按鍵復(fù)位電路,當(dāng)按鍵被按下時,NRST引腳與地連接,產(chǎn)生一個低電平信號,NRST引腳被拉低,從而實(shí)現(xiàn)系統(tǒng)復(fù)位。此電路采用10 kΩ電阻和0.1 μF電容,復(fù)位脈沖時間為:
t=1.1*RC=1.1×10 kΩ×0.1 μF=1 100 μs
(1)
計(jì)算結(jié)果表明,該復(fù)位電路滿足STM32F103VET6的復(fù)位要求。
STM32系列單片機(jī)工作時需要接入一個主頻和一個時鐘頻率,其中主頻4~16 MHz居多,本系統(tǒng)采用常用的8 MHz晶振,提供時鐘頻率的是32.768 kHz晶振。
本系統(tǒng)的超聲測距模塊為獨(dú)立收發(fā)一體式模塊HC-SR04,基于ATMEL公司的AVR Mega16單片機(jī)設(shè)計(jì)了數(shù)據(jù)采集和藍(lán)牙通信電路,采集并處理數(shù)據(jù),處理的結(jié)果通過藍(lán)牙傳輸?shù)街鳈C(jī),有主機(jī)完成GPRS傳輸和TF卡存儲。
3.2 深度測量模塊
測量方案的正確選擇是本系統(tǒng)正常工作的前提。本系統(tǒng)采用測量鉆機(jī)頭離地面的高度間接測量鉆探深度。在測量出高度之后,通過讀取主機(jī)上設(shè)置好的安裝鉆桿的長度數(shù)值,兩者相加即可得到鉆探深度。因此,本系統(tǒng)深度測量方法轉(zhuǎn)變成為距離測量方法。目前常用的測距方案有紅外測距、激光測距、超聲測距等。紅外測距精度較高,但本裝置使用場景為野外,太陽光對紅外測距的影響非常大,陽光強(qiáng)烈時能使紅外測距徹底失靈。激光測距測量距離遠(yuǎn)、測距速度快、性能可靠、精度高,在礦山開采、港口等領(lǐng)域具有廣泛的應(yīng)用,但是價格較高,從裝置產(chǎn)品化經(jīng)濟(jì)性方面考慮也不宜采用。超聲波測距測量精度不及紅外和激光,但能滿足本系統(tǒng)要求(鉆孔深度測距誤差在±5 cm即可);測量距離也較短,但其不受光線影響,而且成本較低,安全性高,從綜合因素考慮,超聲波傳感器最適合本系統(tǒng)的要求。
本系統(tǒng)距離測量采用發(fā)送和接收在同一端的方式,可以選用市場上成熟的發(fā)射超聲頭和接收超聲頭做在一起的集成模塊。超聲波發(fā)射頭發(fā)射超聲波后,單片機(jī)開始開始計(jì)時,遇到地面后反射回來,超聲波接收頭收到反射回來的聲波后就立即停止計(jì)時,然后根據(jù)聲波在空氣中的傳播速度,即可計(jì)算得出聲波傳輸?shù)木嚯x。因?yàn)槌暡ㄊ切凶吡送祪蓚€路程,所以實(shí)際距離為超聲波總傳輸距離的二分之一。本系統(tǒng)設(shè)計(jì)的超聲波測距模塊電路原理圖如圖4所示。

圖4 超聲波測距模塊原理圖
模塊具有單獨(dú)的處理器(STC11單片機(jī)),完成超聲波的增強(qiáng)發(fā)射、接收放大等工作。測距時,單片機(jī)發(fā)送一段40 kHz波形給MAX232芯片,MAX232對40 kHz的信號進(jìn)行電平轉(zhuǎn)換,以放大超聲波功率,達(dá)到較遠(yuǎn)的測量距離。接收電路以TL074為四路低噪聲輸入運(yùn)算放大器為主,對接收到的超聲波電壓信號進(jìn)行信號放大、濾波、電壓比較等。主機(jī)通過藍(lán)牙發(fā)送開始測距命令給測距模塊,超聲波測距模塊內(nèi)部將發(fā)出8個40 kHz周期的電平并檢測回波信號,如若有回波信號被檢測出則輸出回響信號,回響信號的脈沖寬度與所測的距離成比例。
3.3 GPRS通信電路設(shè)計(jì)
GPRS通信電路負(fù)責(zé)將數(shù)據(jù)通過TCP/IP協(xié)議上傳到云端服務(wù)器,本系統(tǒng)選用SIM900A作為通信模塊。SIM900A是一個雙頻(EGSM 900 MHz和DCS 1 800 MHz)的GSM/GPRS模塊。SIM900A模塊提供UART通信接口,制作電路板時將其TXD、RXD兩個引腳與單片機(jī)的UART的TXD、RXD兩個引腳交叉連,即可實(shí)現(xiàn)單片機(jī)和SIM900A之間的數(shù)據(jù)雙向傳遞。SIM900A 模塊另一端與SIM卡通信,其中的5個引腳連接SIM卡的5個對應(yīng)針腳(電源、地、復(fù)位、時鐘、輸入輸出信號)。SIM900A GPRS通信電路如圖5所示。

圖5 SIM900A GPRS通信電路
在電路中,SIM900A模塊的TXD、RXD 兩個引腳連接到單片機(jī)的PA9、PA10這兩個引腳,該兩個引腳可以工作在UART串行通信模式。
3.4 藍(lán)牙模塊設(shè)計(jì)
當(dāng)鉆機(jī)進(jìn)行工作時,深度測量模塊需要將測量結(jié)果實(shí)時反饋到主機(jī)上,雖然有線傳輸速度快,穩(wěn)定性和可靠性強(qiáng),但由于鉆機(jī)結(jié)構(gòu)雜亂,工作時鉆頭鉆桿位置不固定,不方便使用有線通信,因此本系統(tǒng)選用了藍(lán)牙通信作為深度測量模塊和主機(jī)之間的無線通信方式。基于HC-05的藍(lán)牙模塊電路原理圖如圖6所示。

圖6 藍(lán)牙模塊
該模塊可以直接連接各種單片機(jī),它的供電電壓為3.3~3.6 V,跟本設(shè)計(jì)的供電電壓吻合,而且它可以通過AT指令集配置模塊,采用CSR主流藍(lán)牙芯片,藍(lán)牙V2.0協(xié)議標(biāo)準(zhǔn)。配對以后當(dāng)全雙工串口使用,無需了解任何藍(lán)牙協(xié)議,方便使用。
3.5 存儲模塊
本系統(tǒng)TF SD卡作為本地存儲器。TF SD卡具有容量大、讀寫速度快和使用方便等特點(diǎn),同時它的體積很小,便于電路板小型化設(shè)計(jì)。本次設(shè)計(jì)的存儲模塊電路如圖7所示。

圖7 存儲模塊電路
TF SD卡通過SDIO口與單片機(jī)芯片連接。SDIO是安全數(shù)字輸入/輸出接口,完全兼容多媒體卡系統(tǒng)規(guī)范版本4.2,完全支持CE-ATA功能,數(shù)據(jù)傳輸可達(dá)48 MHz。SD數(shù)據(jù)傳輸支持單塊和多塊讀寫,它們分別對應(yīng)不同的操作命令,多塊寫入還需要使用命令來停止整個寫入操作。數(shù)據(jù)寫入前需要檢測SD卡忙狀態(tài),因?yàn)镾D卡在接收到數(shù)據(jù)后編程到存儲區(qū)過程需要一定操作時間。SD卡忙狀態(tài)通過把D0線拉低表示。數(shù)據(jù)塊讀操作與之類似,只是無需忙狀態(tài)檢測。但是單塊寫傳輸速度較慢,對于大量存儲數(shù)據(jù),無法滿足要求,所以文章采用了傳輸速度更快的多塊寫操作。多塊寫操作可以看成是對單塊寫操作的程序優(yōu)化,通過節(jié)省主函數(shù)循環(huán)調(diào)用子函數(shù)及單塊寫操作每次初始應(yīng)答的時間,提高了數(shù)據(jù)寫入速度。使用4數(shù)據(jù)線傳輸時,每次傳輸4 bit數(shù)據(jù),每根數(shù)據(jù)線都必須有起始位、終止位以及CRC位,CRC位每根數(shù)據(jù)線都要分別檢查,并把檢查結(jié)果匯總?cè)缓笤跀?shù)據(jù)傳輸完后通過D0線反饋給主機(jī)。SD卡數(shù)據(jù)存儲的工作流程如圖8所示。

圖8 SD卡存儲工作流程圖
4 信息管理軟件設(shè)計(jì)
地質(zhì)勘探鉆機(jī)鉆探數(shù)據(jù)管理與在線監(jiān)測系統(tǒng)基于B/S架構(gòu),在Maven工程項(xiàng)目中采用Spring、MyBatis、Shiro框架下的開發(fā)平臺Renren-security開發(fā)了服務(wù)器后臺程序。采用Token令牌的單線程通信方式,和MySQL數(shù)據(jù)庫進(jìn)行數(shù)據(jù)交換,搭配Vue框架設(shè)計(jì)的實(shí)現(xiàn)人機(jī)交互的Web瀏覽器操作界面。系統(tǒng)通過HTTP協(xié)議、TCP協(xié)議實(shí)現(xiàn)信息交互,使用IDEA開發(fā)工具、Node.js模型以及Vue.js框架完成了開發(fā),采用了接口和類的編寫方式,實(shí)行Java封裝,極大地優(yōu)化了編譯過程,減少了工作量,同時實(shí)現(xiàn)了豐富的功能。系統(tǒng)具有良好可擴(kuò)展性,可復(fù)用性強(qiáng),功能完善、界面簡約大方、便于用戶前臺查詢和管理員后臺管理維護(hù)。鉆探數(shù)據(jù)管理與在線監(jiān)測系統(tǒng)數(shù)據(jù)流向示意圖如圖9所示。

圖9 鉆探數(shù)據(jù)管理與在線監(jiān)測系統(tǒng)數(shù)據(jù)流向示意圖
使用JavaWebb技術(shù)實(shí)現(xiàn)系統(tǒng)的B/S架構(gòu),Web服務(wù)器布置Servlet,完成HTTP協(xié)議信息交互。基于JavaBean實(shí)習(xí)部分服務(wù)器后臺程序,基于JSP實(shí)現(xiàn)Web服務(wù)器前臺動態(tài)交互。應(yīng)用服務(wù)器程序采用C++語言編寫了TCP通信程序,通過數(shù)據(jù)驅(qū)動接口將數(shù)據(jù)存儲到MySQL數(shù)據(jù)庫。
5 實(shí)驗(yàn)結(jié)果與分析
本文搭建了實(shí)驗(yàn)系統(tǒng)用于驗(yàn)證系統(tǒng)深度測量和數(shù)據(jù)傳輸?shù)臏?zhǔn)確度。
根據(jù)前文介紹的測量原理,實(shí)際深度測量的直接測量數(shù)據(jù)時測量儀安裝位置距離地面的高度。為驗(yàn)證測量準(zhǔn)確度,實(shí)驗(yàn)環(huán)境布設(shè)為鉆孔周邊為平整地面。鉆機(jī)作業(yè)過程中,鉆機(jī)旁邊放置一個高2.5米的梯子,驗(yàn)證人員在梯子上用長卷尺測量測量儀離地面高度,與測量主機(jī)讀數(shù)進(jìn)行比較。共進(jìn)行了200次實(shí)驗(yàn)對比,隨機(jī)選取20次測量結(jié)果列于表2中。
為減少人工測量因測量人員讀數(shù)嚴(yán)謹(jǐn)性造成的不準(zhǔn)確,這200次實(shí)驗(yàn)對比是由20個測量人員完成,每個測量人員測量10次。表2中的20組數(shù)據(jù)為每個測量人員選取了一組數(shù)據(jù)列出來,由測量對比結(jié)果可以看到,系統(tǒng)測量誤差小于等于1.4 cm,符合系統(tǒng)設(shè)計(jì)指標(biāo)。

表2 選取20組測距結(jié)果對比 cm
另外,為了測試數(shù)據(jù)傳輸?shù)臏?zhǔn)確程度,在測量深度準(zhǔn)確度的同時,遠(yuǎn)程數(shù)據(jù)平臺也記錄了實(shí)時測量結(jié)果,與本地結(jié)果進(jìn)行對比。選取與表1同樣的本地系統(tǒng)數(shù)據(jù),與遠(yuǎn)程采集數(shù)據(jù)對比列于表3中。

表3 選取20組傳輸結(jié)果對比 cm
由表3可見,傳輸數(shù)據(jù)準(zhǔn)確率為100%,優(yōu)于設(shè)計(jì)標(biāo)準(zhǔn),有力的保障了測量數(shù)據(jù)的可靠傳遞和存儲。
6 結(jié)束語
本文介紹了一種具有GPRS通信功能的地質(zhì)勘探鉆機(jī)實(shí)時孔深測量系統(tǒng)的設(shè)計(jì)方案。系統(tǒng)采用了STM32系列微處理器芯片STM32F103VET6作為主控單元,數(shù)據(jù)存儲選用了金士頓64Gclass10高速SDHC卡,通過USB接口技術(shù)實(shí)現(xiàn)數(shù)據(jù)的存儲,通過TCP/IP協(xié)議完成了與云服務(wù)器之間的數(shù)據(jù)傳輸,并開發(fā)了基于B/S架構(gòu)的地質(zhì)勘探鉆機(jī)鉆探數(shù)據(jù)管理與在線監(jiān)測系統(tǒng),實(shí)現(xiàn)了對地質(zhì)勘探鉆機(jī)工作信息的數(shù)據(jù)采集、存儲與管理。系統(tǒng)在建筑工地進(jìn)行了試驗(yàn)驗(yàn)證,數(shù)據(jù)正確率高,系統(tǒng)工作穩(wěn)定,但工作現(xiàn)場泥水較多,如何做好系統(tǒng)樣機(jī)的防護(hù)設(shè)計(jì),達(dá)到真正實(shí)用的程度,尚需進(jìn)一步研究[1-11]。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
電子制作(2019年13期)2020-01-14 03:15:28
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45