基于物聯(lián)網(wǎng)技術(shù)的低產(chǎn)井間歇抽油自尋優(yōu)控制系統(tǒng)設(shè)計(jì)
2021-10-08 02:22:38郭振華
計(jì)算機(jī)測(cè)量與控制 2021年9期
關(guān)鍵詞:信息
高 娟,王 維,龐 波,龐 靜,郭振華
(延長(zhǎng)油田股份有限公司 七里村采油廠,陜西 延安 717111)
0 引言
目前網(wǎng)絡(luò)信息技術(shù)的不斷發(fā)展,物聯(lián)網(wǎng)技術(shù)得到較大的提升,依靠物聯(lián)網(wǎng)技術(shù)能夠獲取較多的數(shù)據(jù),進(jìn)而掌控研究目標(biāo)更加完整的信息[1]。油田在采油過(guò)程中,抽油機(jī)器抽取油量將多于油井的油量自主吸收量,將造成抽空現(xiàn)象的產(chǎn)生,進(jìn)而浪費(fèi)油量開采過(guò)程中所需的電能,同時(shí)損壞抽油機(jī)器內(nèi)部零件,導(dǎo)致較為嚴(yán)重的后果[2]。因此,為了避免抽油機(jī)損壞造成的事故,相關(guān)研究學(xué)者針對(duì)低產(chǎn)井間歇抽油機(jī)制設(shè)計(jì)自尋優(yōu)控制系統(tǒng)。
由于油田在開采的過(guò)程中具有特殊性,抽油機(jī)在抽油的同時(shí)產(chǎn)生狀態(tài)監(jiān)控故障,為此,在進(jìn)行控制系統(tǒng)設(shè)計(jì)的初始階段需對(duì)油田的基礎(chǔ)情況進(jìn)行分析,并不斷調(diào)整基礎(chǔ)情況信息與抽油機(jī)制間的關(guān)聯(lián)程度,完善控制原則,轉(zhuǎn)化抽油的控制空間,實(shí)現(xiàn)實(shí)時(shí)監(jiān)控,從而提升整體控制系統(tǒng)的控制性能[3]。目前的低產(chǎn)井間歇抽油自尋優(yōu)控制系統(tǒng)設(shè)計(jì)在獲取基礎(chǔ)抽油數(shù)據(jù)的基礎(chǔ)上,構(gòu)建控制系統(tǒng),并調(diào)整控制系統(tǒng)的控制中心,整合系統(tǒng)內(nèi)部操作機(jī)制,增強(qiáng)控制系統(tǒng)的控制有效率[4]。但在控制系統(tǒng)設(shè)計(jì)的過(guò)程中對(duì)于系統(tǒng)內(nèi)部的元件調(diào)節(jié)力度較小,無(wú)法完成任務(wù)量較大的抽油工作。為此,針對(duì)上述問(wèn)題,提出基于物聯(lián)網(wǎng)技術(shù)的低產(chǎn)井間歇抽油自尋優(yōu)控制系統(tǒng)設(shè)計(jì),對(duì)以上問(wèn)題進(jìn)行分析與解決。本文系統(tǒng)設(shè)計(jì)在設(shè)計(jì)的同時(shí)兼顧系統(tǒng)的硬件元件與軟件平臺(tái)的關(guān)聯(lián)信息,并加強(qiáng)對(duì)系統(tǒng)主導(dǎo)信息的管理力度,增強(qiáng)整體系統(tǒng)控制力度,能夠有效減小系統(tǒng)無(wú)功補(bǔ)償誤差,縮短控制時(shí)間,完善了控制系統(tǒng)的內(nèi)部控制空間與控制程序內(nèi)容,擴(kuò)大了整體控制的范圍,為后續(xù)研究提供良好的研究數(shù)據(jù)基礎(chǔ)。
1 系統(tǒng)結(jié)構(gòu)及原理
基于物聯(lián)網(wǎng)技術(shù)的低產(chǎn)井間歇抽油自尋優(yōu)控制系統(tǒng)結(jié)構(gòu)如圖1所示。

圖1 基于物聯(lián)網(wǎng)技術(shù)的低產(chǎn)井間歇抽油自尋優(yōu)控制系統(tǒng)結(jié)構(gòu)
根據(jù)圖1可知,基于物聯(lián)網(wǎng)技術(shù)的低產(chǎn)井間歇抽油自尋優(yōu)控制系統(tǒng)硬件結(jié)構(gòu)主要由數(shù)據(jù)采集器、前置服務(wù)器和數(shù)據(jù)控制器組成,軟件控制平臺(tái)通過(guò)設(shè)置軟件內(nèi)部參數(shù),交換原油數(shù)據(jù)傳感信息,測(cè)量系統(tǒng)軟件電壓,構(gòu)建控制準(zhǔn)則與控制平臺(tái)程序,查詢匹配最佳數(shù)值信息,實(shí)現(xiàn)低產(chǎn)井間歇抽油自尋優(yōu)控制。
2 基于物聯(lián)網(wǎng)技術(shù)的低產(chǎn)井間歇抽油自尋優(yōu)控制系統(tǒng)硬件設(shè)計(jì)
基于物聯(lián)網(wǎng)技術(shù)的低產(chǎn)井間歇抽油自尋優(yōu)控制系統(tǒng)硬件結(jié)構(gòu)如圖2所示。

圖2 基于物聯(lián)網(wǎng)技術(shù)的低產(chǎn)井間歇抽油自尋優(yōu)控制系統(tǒng)硬件結(jié)構(gòu)
根據(jù)圖2可知,基于物聯(lián)網(wǎng)技術(shù)的低產(chǎn)井間歇抽油自尋優(yōu)控制系統(tǒng)硬件結(jié)構(gòu),采用DCZL23-WFET600S-I型數(shù)據(jù)采集器,通過(guò)RS48通信方式[5-6],將抽取的原油數(shù)據(jù)輸入模糊控制器及PID控制器中,并傳導(dǎo)數(shù)據(jù)信息至中心控制系統(tǒng)中,連接USB接口,完成原油數(shù)據(jù)的采集。通過(guò)前置服務(wù)器子站利用光纖發(fā)送至前置通信設(shè)備,完成原油數(shù)據(jù)收集清洗,實(shí)現(xiàn)內(nèi)外部原油數(shù)據(jù)銜接。利用串口SSI三線信號(hào)輸入,適用于單圈SPI串口編碼器,RS-485的串口連接,12 V或5 V外供電源的數(shù)據(jù)控制器,實(shí)現(xiàn)系統(tǒng)的協(xié)調(diào)控制操作,完善系統(tǒng)操作,提升系統(tǒng)的協(xié)調(diào)控制有效率,并由此構(gòu)建控制系統(tǒng)硬件設(shè)計(jì)。
2.1 數(shù)據(jù)采集器
對(duì)抽取的原油數(shù)據(jù)進(jìn)行收集,本文數(shù)據(jù)采用DCZL23-WFET600S-I型采集器,該采集器采用高性能低功耗微控制器硬件平臺(tái)和嵌入式操作系統(tǒng)軟件平臺(tái),具有靈活的系統(tǒng)升級(jí)能力,支持電力線載波、微功率無(wú)線、RS485等各種通信方式[7]。其中,上行通信采用模塊化設(shè)計(jì),管理原油數(shù)據(jù)系統(tǒng)操作信息,在管理的同時(shí)能夠傳導(dǎo)數(shù)據(jù)信息至中心控制系統(tǒng)中,并連接USB接口,保證數(shù)據(jù)信息的傳輸安全性,利用不同的傳導(dǎo)通道弱化系統(tǒng)數(shù)據(jù)間的差異信息,促進(jìn)數(shù)據(jù)的同一化發(fā)展,及時(shí)清除不符合數(shù)據(jù)系統(tǒng)操作的原油輸出數(shù)據(jù),確保數(shù)據(jù)傳輸?shù)募儩嵭訹8]。采集器結(jié)構(gòu)如圖3所示。
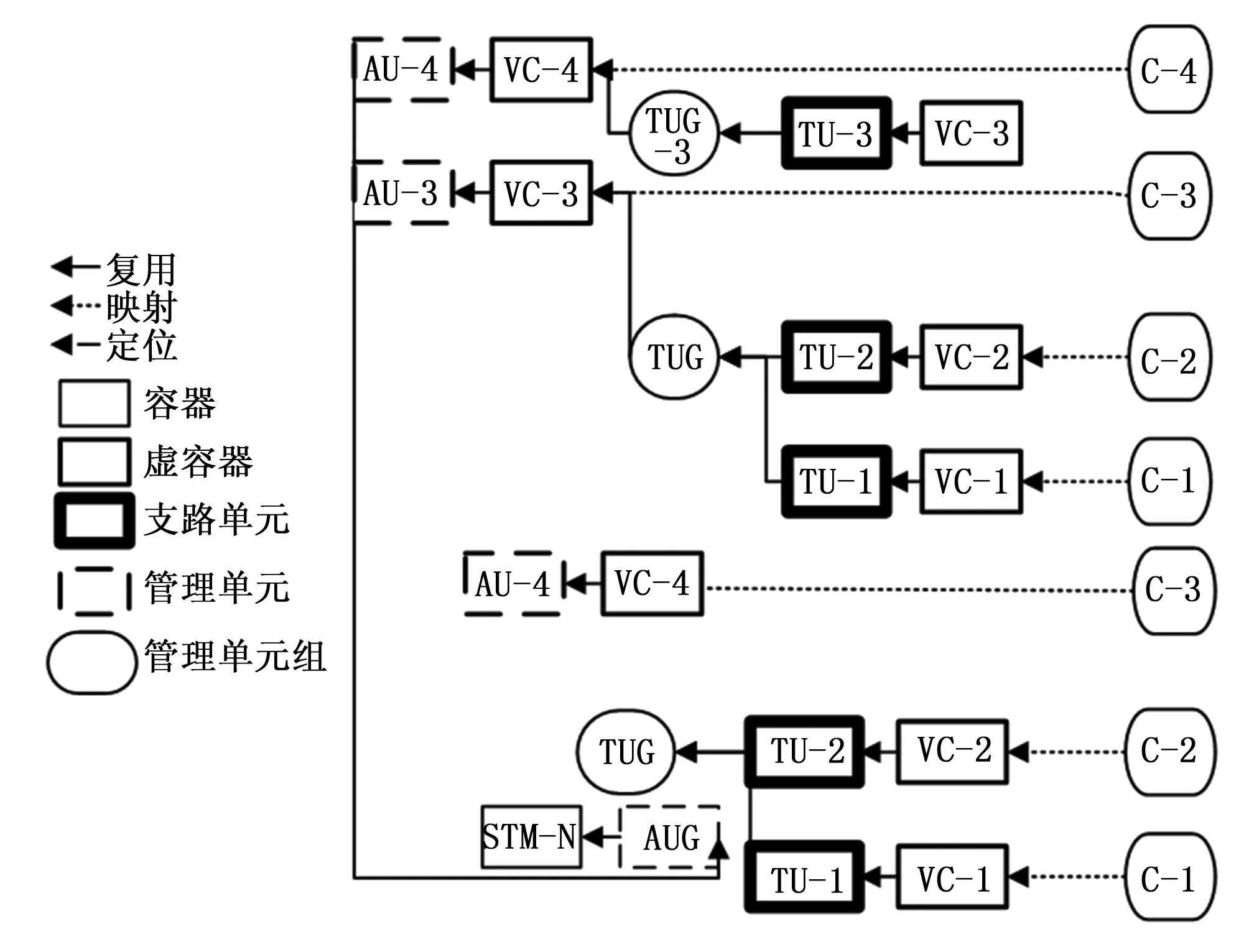
圖3 采集器結(jié)構(gòu)
如圖3所示,C-1管理單元組通過(guò)映射傳輸至VC-1虛容器中,并將VC-1虛容器通過(guò)定位到TU-1支路單元,通過(guò)復(fù)用傳輸至TUG管理單元組,由TUG管理單元組復(fù)用傳輸至VC-3虛容器,再由VC-3虛容器復(fù)用傳輸至AU-3管理單元。
采集器工作原理如圖4所示。

圖4 采集器工作原理圖
根據(jù)圖4的采集器工作原理圖可知,采用DCZL23-WFET600S-I型采集器,將抽取的原油數(shù)據(jù)輸入模糊控制器及PID控制器,保證數(shù)據(jù)采集過(guò)程的安全性,通過(guò)信號(hào)板得到輸出值,實(shí)現(xiàn)原油數(shù)據(jù)采集。
2.2前置服務(wù)器
基于物聯(lián)網(wǎng)技術(shù)的低產(chǎn)井間歇抽油自尋優(yōu)控制系統(tǒng)硬件前置服務(wù)器屬于自己開發(fā)部分,用于在用戶側(cè),采集和存儲(chǔ)原油信息,前置服務(wù)器結(jié)構(gòu)如圖5所示。

圖5 前置服務(wù)器結(jié)構(gòu)
如圖5所示,前置服務(wù)器主要由子站和前置通信設(shè)備組成。電參量檢測(cè)、信號(hào)調(diào)理和壓力與流量變換傳輸至前置服務(wù)器,通過(guò)子站利用光纖發(fā)送至通信設(shè)備,采用GPRS前置通信設(shè)備,傳輸至開閉所,做原油數(shù)據(jù)收集清洗,采用無(wú)線前置通信設(shè)備,傳輸至分支箱,實(shí)現(xiàn)內(nèi)外部原油數(shù)據(jù)銜接。
2.3 數(shù)據(jù)控制器
根據(jù)數(shù)據(jù)系統(tǒng)控制的性能,進(jìn)一步分析其存在的必要條件,設(shè)置相應(yīng)的數(shù)據(jù)控制器,標(biāo)準(zhǔn)化處理控制數(shù)據(jù)。
在完成初始硬件控制元件收集后,構(gòu)建整體數(shù)據(jù)控制器,選用控制系統(tǒng)標(biāo)記控制器,該控制器具有串口數(shù)據(jù)采集功能,集電阻信號(hào)輔助,繼電器控制,485通訊于一體,可以適用于單圈SPI串口編碼器,顯示角度變化和位移變化,串口SSI三線信號(hào)輸入,外供電源為12 V或5 V[9]。數(shù)據(jù)控制器結(jié)構(gòu)如圖6所示。

圖6 數(shù)據(jù)控制器結(jié)構(gòu)
根據(jù)圖6可知,具有顯示串口絕對(duì)編碼器,累加多圈計(jì)長(zhǎng)計(jì)米外,接入0~10 K或0~2.5 V電壓信號(hào)電位器,與單圈并口絕對(duì)值配合使用,產(chǎn)生多圈絕對(duì)值的使用效果,加大數(shù)據(jù)控制的成功率。經(jīng)過(guò)數(shù)據(jù)整體控制,完善控制系統(tǒng)的中心配置,并強(qiáng)化對(duì)原油信息的抽取研究力度,構(gòu)建控制局部機(jī),機(jī)內(nèi)設(shè)置12個(gè)時(shí)段配時(shí),對(duì)應(yīng)不同的時(shí)間段分配抽油模式,并連接感應(yīng)窗口,設(shè)置以太網(wǎng)連接口與RS232連接口,經(jīng)過(guò)光纖收發(fā)器或無(wú)線路由器通過(guò)光纖、網(wǎng)線、無(wú)線網(wǎng)與交通指揮中心聯(lián)網(wǎng),實(shí)時(shí)記錄交通客流信息,以便對(duì)系統(tǒng)的協(xié)調(diào)控制操作,完善系統(tǒng)操作,提升系統(tǒng)的協(xié)調(diào)控制有效率。
在標(biāo)準(zhǔn)化處理控制模塊內(nèi)部,提升硬件元件電路完整程度,其內(nèi)部電路板集中采用統(tǒng)一標(biāo)準(zhǔn),避免因數(shù)據(jù)外部因素不同造成的系統(tǒng)設(shè)計(jì)失誤[10]。選用機(jī)箱接口連接不同的控制數(shù)據(jù),連通數(shù)據(jù)電荷泵線與機(jī)箱接口,連接口符合CPCI標(biāo)準(zhǔn)。數(shù)據(jù)控制器內(nèi)部電路如圖7所示。

圖7 數(shù)據(jù)控制器電路圖
根據(jù)圖7的數(shù)據(jù)控制器電路圖可知,本文研究的數(shù)據(jù)控制單元包括耦合變壓器、變壓器和輸出濾波器,內(nèi)部服務(wù)器具有很強(qiáng)的信息分析能力[11]。由此完成低產(chǎn)井間歇抽油自尋優(yōu)控制系統(tǒng)硬件設(shè)計(jì)。
3 基于物聯(lián)網(wǎng)技術(shù)的低產(chǎn)井間歇抽油自尋優(yōu)控制系統(tǒng)軟件設(shè)計(jì)
在低產(chǎn)井間歇抽油的過(guò)程中,抽油區(qū)域地層能量較低,油量滲透效果較差,抽取的原油數(shù)量較少,前井口間歇出液的模式將影響抽油液面的變化頻率,抽油泵的沉沒(méi)程度將大幅度提升。在低產(chǎn)井關(guān)閉后,油井的抽油時(shí)間間隔減少,抽油液面上升,此刻抽油動(dòng)態(tài)液面的充滿程度最高,但若持續(xù)進(jìn)行抽油工作,將產(chǎn)生井口不出液的現(xiàn)象[12-13]。為避免該種現(xiàn)象,本文軟件控制平臺(tái)調(diào)整內(nèi)部控制程序,將控制準(zhǔn)則與控制平臺(tái)程序相匹配,并查詢匹配的最佳數(shù)值信息,實(shí)現(xiàn)平臺(tái)初始化處理操作。同時(shí),設(shè)計(jì)軟件控制背板,通過(guò)控制背板成功實(shí)現(xiàn)整體軟件程序控制,并提升控制子系統(tǒng)間的聯(lián)系作用,連接控制前端與控制信道,構(gòu)建良好的數(shù)據(jù)傳輸聯(lián)絡(luò)通道。交換原油數(shù)據(jù)傳感信息,并連接系統(tǒng)軟件平臺(tái)的中心控制網(wǎng)絡(luò),執(zhí)行網(wǎng)絡(luò)連接指令,提升整體控制網(wǎng)絡(luò)連接的有效性。軟件內(nèi)部參數(shù)設(shè)置如圖8所示。

圖8 軟件內(nèi)部參數(shù)設(shè)置
根據(jù)圖8的軟件內(nèi)部參數(shù)及時(shí)切換信號(hào)傳輸路徑,將控制數(shù)據(jù)集中于相同的控制空間內(nèi)。在進(jìn)行抽油數(shù)據(jù)控制軟件網(wǎng)絡(luò)設(shè)置的過(guò)程中,盡量減少傳輸電容在無(wú)線傳感網(wǎng)絡(luò)通道中的分布,避免兩條信號(hào)線的平行設(shè)置,降低不同信號(hào)線之間的干擾程度。選擇相關(guān)程度較高的內(nèi)部傳輸網(wǎng)絡(luò)線,將收集的抽油處理信息傳輸至相應(yīng)的控制方位中,等待控制背板的平臺(tái)處理,調(diào)配前端信號(hào)線信息,選用協(xié)調(diào)程度較高的控制機(jī)制進(jìn)行數(shù)據(jù)控制,并結(jié)合驅(qū)動(dòng)輸入模式將數(shù)據(jù)完整錄入控制平臺(tái)內(nèi)部,每路驅(qū)動(dòng)能力為550 W,采用光電轉(zhuǎn)換隔離技術(shù)[14],完整反映交通客流信號(hào)信息,減少了不必要的系統(tǒng)操作浪費(fèi)。電機(jī)保護(hù)子程序如圖9所示。

圖9 電機(jī)保護(hù)子程序
選用交流采樣法進(jìn)行系統(tǒng)軟件電壓測(cè)量,由于該方法無(wú)法流經(jīng)整體電路,在設(shè)計(jì)的同時(shí)按照一定的操作規(guī)律將平臺(tái)外部的電壓與電流的流經(jīng)數(shù)值轉(zhuǎn)化為系統(tǒng)計(jì)算程序能夠有效測(cè)量的交流程序信號(hào)[15]。通過(guò)A/D轉(zhuǎn)化為模塊信息錄入計(jì)算程序進(jìn)行運(yùn)算處理,并計(jì)算出電壓與電流的有效數(shù)值,針對(duì)此時(shí)的原油數(shù)據(jù)流通狀況選擇合適的抽油速率,調(diào)整程序計(jì)算的信息量,并及時(shí)處理平臺(tái)接收的數(shù)據(jù)信息。儲(chǔ)層產(chǎn)液速率計(jì)算過(guò)程如下:
(1)
其中:Q代表計(jì)算得到的儲(chǔ)層產(chǎn)液速率,選擇的單位為m3/s;K表示得到的儲(chǔ)層滲透率,單位為10-3μm2;h代表內(nèi)部的儲(chǔ)層厚度,單位為m;ρ表示內(nèi)部的液體密度,單位為kg/m3;g表示重力加速度,取值為9.8 m/s2;H表示油套的液體高度,單位為m;μ表示得到的流體粘度[16],單位為mPa/s;re表示得到的供給半徑;rw表示得到的井筒半徑;S表示表皮系數(shù)。
儲(chǔ)層內(nèi)部的產(chǎn)液速率和動(dòng)液面高度動(dòng)態(tài)如圖10所示。

圖10 儲(chǔ)層內(nèi)部的產(chǎn)液速率和動(dòng)液面高度動(dòng)態(tài)示意圖
選用適宜的運(yùn)算程序?qū)Τ橛妥詫?yōu)控制系統(tǒng)進(jìn)行最終控制,利用正弦模型算法程序,結(jié)合被采樣的波形的純正弦規(guī)律將抽取的原有數(shù)據(jù)轉(zhuǎn)移至計(jì)算中心中,并對(duì)信號(hào)波形的產(chǎn)生條件進(jìn)行分析,記錄分析后的結(jié)果數(shù)據(jù),疊加周期函數(shù)算法[17-18]。調(diào)整算法的錄入模式,并針對(duì)假設(shè)算法的基本信息構(gòu)建假設(shè)電壓與流經(jīng)電流數(shù)據(jù),提升輸出信號(hào)的有效率,在較高的信號(hào)輸入的基礎(chǔ)上進(jìn)行模塊數(shù)據(jù)處理操作,控制分解的函數(shù)序列,并設(shè)置序列和參數(shù),將此參數(shù)作為控制級(jí)數(shù)保存至控制平臺(tái)分析中心,排除樣品參數(shù)存在的可能性,將真實(shí)分析的原油監(jiān)控?cái)?shù)據(jù)與分析中心數(shù)據(jù)相結(jié)合,實(shí)現(xiàn)對(duì)控制平臺(tái)的程序構(gòu)建,達(dá)到低產(chǎn)井間歇抽油自尋優(yōu)控制系統(tǒng)軟件設(shè)計(jì)的目的。
4 實(shí)驗(yàn)研究
為了探究本文提出的基于物聯(lián)網(wǎng)技術(shù)的低產(chǎn)井間歇抽油自尋優(yōu)控制系統(tǒng)的有效性,與基于粒子群算法的控制系統(tǒng)和基于ARM技術(shù)的控制系統(tǒng)進(jìn)行對(duì)比實(shí)驗(yàn)。
設(shè)置實(shí)驗(yàn)參數(shù)如表1所示。

表1 實(shí)驗(yàn)參數(shù)
根據(jù)表1的實(shí)驗(yàn)參數(shù),選用基于物聯(lián)網(wǎng)技術(shù)的低產(chǎn)井間歇抽油自尋優(yōu)控制系統(tǒng)與基于粒子群算法和基于ARM技術(shù)的控制系統(tǒng)進(jìn)行對(duì)比實(shí)驗(yàn),得到的頻率差保護(hù)實(shí)驗(yàn)結(jié)果如表2所示。

表2 頻率差保護(hù)實(shí)驗(yàn)結(jié)果
根據(jù)表2可知,本文研究的基于物聯(lián)網(wǎng)技術(shù)的低產(chǎn)井間歇抽油自尋優(yōu)控制系統(tǒng)的頻率差保護(hù)整體值為7.0 Hz,動(dòng)作值為50.05 Hz,明顯高于基于粒子群算法和基于ARM技術(shù)的控制系統(tǒng)。由此可知,本文研究的基于物聯(lián)網(wǎng)技術(shù)的低產(chǎn)井間歇抽油自尋優(yōu)控制系統(tǒng)的頻率差保護(hù)能力要優(yōu)于基于粒子群算法和基于ARM技術(shù)的控制系統(tǒng)。因此控制結(jié)果更加可靠,確保結(jié)果更加準(zhǔn)確,能夠有效完成低產(chǎn)井間歇抽油自尋優(yōu)控制。
無(wú)功補(bǔ)償誤差實(shí)驗(yàn)結(jié)果如圖11所示。

圖11 無(wú)功補(bǔ)償誤差實(shí)驗(yàn)結(jié)果
根據(jù)圖11可知,在單位時(shí)間內(nèi),本文研究的基于物聯(lián)網(wǎng)技術(shù)的低產(chǎn)井間歇抽油自尋優(yōu)控制系統(tǒng)的無(wú)功補(bǔ)償誤差較小。因?yàn)楸疚难芯康南到y(tǒng)在設(shè)置抽油數(shù)據(jù)控制軟件網(wǎng)絡(luò)過(guò)程中,減少了傳輸電容分布,避免了兩條信號(hào)線的平行設(shè)置,降低了不同信號(hào)線之間的干擾程度,由此減小控制系統(tǒng)的無(wú)功補(bǔ)償誤差。
在此基礎(chǔ)上,進(jìn)一步驗(yàn)證本文研究的基于物聯(lián)網(wǎng)技術(shù)的低產(chǎn)井間歇抽油自尋優(yōu)控制系統(tǒng)的控制時(shí)間,分別采用基于物聯(lián)網(wǎng)技術(shù)的低產(chǎn)井間歇抽油自尋優(yōu)控制系統(tǒng)與基于粒子群算法和基于ARM技術(shù)的控制系統(tǒng)進(jìn)行對(duì)比,得到低產(chǎn)井間歇抽油自尋優(yōu)控制時(shí)間實(shí)驗(yàn)結(jié)果如圖12所示。

圖12 低產(chǎn)井間歇抽油自尋優(yōu)控制時(shí)間實(shí)驗(yàn)結(jié)果
根據(jù)圖12可知,當(dāng)實(shí)驗(yàn)次數(shù)為6次時(shí),本文研究的基于物聯(lián)網(wǎng)技術(shù)的低產(chǎn)井間歇抽油自尋優(yōu)控制系統(tǒng)的平均控制時(shí)間為7.6 s,而基于粒子群算法和基于ARM技術(shù)的控制系統(tǒng)的平均控制時(shí)間分別為13.2 s和17 s。由此可知,本文研究的基于物聯(lián)網(wǎng)技術(shù)的低產(chǎn)井間歇抽油自尋優(yōu)控制系統(tǒng)的控制時(shí)間較短,因?yàn)楸疚难芯康南到y(tǒng)能夠針對(duì)原油數(shù)據(jù)流通狀況,選擇合適的抽油速率,調(diào)整程序計(jì)算的信息量,并及時(shí)處理平臺(tái)接收的數(shù)據(jù)信息,從而有效縮短系統(tǒng)的控制時(shí)間。
5 結(jié)束語(yǔ)
為了增強(qiáng)低產(chǎn)井間歇抽油自尋優(yōu)控制系統(tǒng)頻率差保護(hù)能力,減小無(wú)功補(bǔ)償誤差,縮短控制時(shí)間,設(shè)計(jì)了基于物聯(lián)網(wǎng)技術(shù)的低產(chǎn)井間歇抽油自尋優(yōu)控制系統(tǒng)。研究不同狀態(tài)下低產(chǎn)井間歇抽油的基礎(chǔ)抽油機(jī)制,并調(diào)配自尋有控制系統(tǒng)性能,提升整體控制的效率,不斷強(qiáng)化內(nèi)部控制空間的數(shù)據(jù)監(jiān)控水平。結(jié)合軟件控制平臺(tái)掌控抽油自尋優(yōu)信息數(shù)據(jù),實(shí)現(xiàn)低產(chǎn)井間歇抽油自尋優(yōu)控制系統(tǒng)設(shè)計(jì)。該系統(tǒng)具有較強(qiáng)的頻率差保護(hù)能力,能夠有效減小無(wú)功補(bǔ)償誤差,縮短系統(tǒng)控制時(shí)間,更好地為使用者服務(wù),發(fā)展空間較為廣闊。
猜你喜歡
中華手工(2017年2期)2017-06-06 23:00:31
中外會(huì)展(2014年4期)2014-11-27 07:46:46
大眾創(chuàng)業(yè)(2009年10期)2009-10-08 04:52:00
數(shù)字社區(qū)&智能家居(2009年7期)2009-09-29 08:16:48
數(shù)字社區(qū)&智能家居(2009年11期)2009-06-25 04:30:34
數(shù)字社區(qū)&智能家居(2009年3期)2009-04-21 03:09:04
數(shù)字社區(qū)&智能家居(2009年2期)2009-03-27 04:33:44
數(shù)字社區(qū)&智能家居(2009年12期)2009-02-03 07:50:48
建筑創(chuàng)作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32