基于高斯牛頓法的可匹配機器人高精度自動抓放料方法
2021-10-08 02:22:42秦健勇
計算機測量與控制 2021年9期
關鍵詞:方法
代 康,秦健勇,謝 凱
(新疆工程學院 信息工程學院,烏魯木齊 830023)
0 引言
現階段科技不斷發展,智能機器人已成為人們生活中不可或缺的一部分,并在各行各業中廣泛應用。在當前工業加工作業中,通常需要將作業中的工件原料放置于數控設備中,經過打磨、壓制等一系列工序后,再從數控設備中取出,從而形成工業成品[1-2]。工件的上料和成品的放料主要由工人完成,從裝有工件的料箱內取出工件,放入加工設備中,待加工完成后,再從加工設備中取出工件成品,放置于成品工件的容器內[3]。這一步驟工人必須反復進行,在抓放料時,容易刮花工件,從而增大了工件成品的次品率。
目前國內研究學者對相關領域進行研究,并取得了一定的研究成果,文獻[4]提出前車橋上料機器人手爪及上料輔助裝置設計方案,通過分析前車橋組件形態和定位精度,設計抓取定位組件的上料機器人手爪和輔助裝置,對手爪與組件孔銷配合誤差進行分析,得出了各部件之間的配合誤差。該方法可有效避免組件形狀誤差對全套設備運轉的影響,但該方法存在次品率較高的問題。文獻[5]設計復雜競賽任務中的自動分揀搬運機器人系統,將STM32F103C8T6單片機作為主控芯片,利用灰度傳感器SEN1595識別地面標識,采用PDI-6221MG舵機驅動五自由度小型機械臂,通過機械臂抓取物料并結合堆垛輔助機構存放于搬運車內,完成堆垛任務。該方法可提高分揀運輸智能化程度,但該方法的抓放料精度較低。
針對上述問題,為提高機器人抓放料精度,降低抓放料過程次品率,提出基于高斯牛頓法的可匹配機器人高精度自動抓放料方法,通過編程程序設計,結合高斯牛頓法,實現機器人自動抓料和放料,這一過程不易出現操作失誤,有效躲避障礙物,降低抓放過程次品率。
1 設計可匹配機器人自動抓放料裝置
設計的可匹配機器人自動抓放料裝置包括工作站、機器人夾具、抓放料裝置。通過3種裝置配合提高抓放過程的精準度。可匹配機器人自動抓料和放料裝置結構如圖1所示。

圖1 可匹配機器人自動抓料和放料裝置結構
根據圖1可知,工作站主要用于放置工件原料,并利用定位桿進行定位,通過吸氣設備和抽氣設備,機器人將工件放置于數控設備中進行加工。機器人夾具主要用于吸取工件原料,放置工件成品,利用機器人夾具結構,將工件成品取下放置在工件成品專門容器內,使工件能夠自動抓放料。
1.1 工作站
工作站的整體設計結構可以分為兩種,第一種結構包括:機器人抓料、放料系統、數控設備、儲存放置臺以及各種夾具等[6]。機器人通過抓料設備將工件安放到數控設備上進行加工,加工結束后,機器人利用各類夾具將成品工件從數控設備上取下,放到放料臺上或者存儲工件的專門容器內。第二種結構包括:機器人、放料臺、抓料裝置、夾具等,放料臺用來存儲安放工件,抓料裝置設置在機器人的前臂上,用來將放料臺上的原有工件移動到數控機上,夾具以及動力設備安裝在座椅上。
工作站的吸氣設備和抽氣設備相連,通過真空機的強大吸附力吸取工件,機器人將工件安放到數控機上進行加工,加工結束后,機器人利用夾具將工件成品從數控機上取下放在放料臺上或者專門的容器內,這樣使工件能夠自動抓料、放料。
1.2 機器人夾具
在工件加工過程中,工件原料具有多樣性,為解決頻繁更換夾具以及夾取中夾具松動問題,設計一種自帶感應器的全新夾具,這種全新夾具由夾具件、夾取設備和吸附設備構成。機器人夾具結構如圖2所示。

圖2 機器人夾具結構
根據圖2可知,夾取設備由很多夾爪和動力設備組成,動力設備用來驅動夾爪進行抓料放料,夾爪上安裝了防滑膠套,以防夾爪抓料過程中或取出工件成品時出現滑落情況,加大了抓取的力度,減少抓料放料故障的發生,防滑膠套安裝在夾爪的上端,在防滑膠套的表面也可以安裝定位槽,以便機器人能夠安全有效使用夾具[7]。夾取設備安裝有其合適的位置傳感器,傳感器能夠精準檢測到原有工件和工件成品抓放的位置,方便機器人及時調整抓料、放料,使操作更加簡單、精準,發生意外故障的概率大大降低[8-10]。機器人使用夾具夾取工件原料和工件成品時,夾具的前爪和后爪要固定在活塞桿上,動力設備為驅動夾取力,驅動套安裝在夾具上,驅動套可以自由旋轉使夾具工作更靈活,夾具上的托片裝置搭建在2個夾具套之間,機器人與夾托片相連,可使夾具進行二維運動以及高速旋轉[11-12]。各個夾爪的前端安裝在驅動套第3樞接鈕上,夾爪數量設置為2個,使機器人在使用夾具時,更容易握取移動,動作迅速且安裝可靠。在實際工作中,可根據靈活度對夾爪數量進行調整,動力裝置還可采用單片機等動力結構,使各不同種類的工件均能夠順利加工。
1.3 抓放料裝置
為了提高工人抓料、放料的工件成品的合格率,根據工件的原有構造設計了1套抓放料裝置,可用于儲存工件成品的放料臺或者抓料設備。抓放料裝置結構如圖3所示。

圖3 抓放料裝置結構
由圖3可知,原有工件的末端位置安裝插孔,抓料臺上開設定位孔,樞接軸的后壁上設置具有圓孔的定位桿,吸嘴若干個,根據實際工作可調整其數量,位置設置在定位槽的前臂上并上下分布在定位桿附近。驅動吸嘴對原有工件進行單點環繞吸附,加大吸嘴的吸附力度,提高機器人的工作效率,這樣能夠提高動力設備的使用率,以防機器人在移動工件原料以及工件成品的過程中出現松動和滑落[13]。定位槽可清洗并可拆卸,根據定位桿的不同尺寸可靈活調整定位槽的大小規格,擴大了抓放料裝置在實際操作中的使用范圍,提高工件成品的生產量。機器人在驅動放料裝置時,將數控機加工完成的工件成品放在放料臺上或者專門存放工件成品的容器中,可使工件成品正常保存,機器人也可將工件成品移動到放料裝置上,方便對原有工件的回收以及工件成品的安全存放[14-15]。機器人在實際操作抓放料時,機器人和存放工件成品的容器通常位于放料臺的一側,也可根據實際工作時的具體情況而定,使工件成品安全存放。
2 可匹配機器人高精度自動抓放料方法
2.1 構建自動抓放料數學模型
為構建可匹配機器人自動抓料和放料數學模型,首先建立可匹配機器人移動的坐標系如圖4所示。

圖4 可匹配機器人移動坐標系
根據圖4可知,QRobot為機器人動態機械前端坐標系,Qtool為機器人動態機械中心工具坐標系,這個坐標系需要經過每個機器人在測試系統自動顯示的4維標準圖,QWorld為機器人抓放料機械的世界坐標系,Qmachine是以數控機插槽抓放料的中心為原點的自定義坐標系。WorldKmachine為數控機插槽抓放料自定義世界坐標系與機器人動態機械中心坐標系之間的聯系,toolKWorld為可匹配機器人抓放料動態機械工具坐標系與可匹配機器人自動抓放料自定義世界坐標系之間的線性關系,toolKmachine為機器人動態機械中心控制工具坐標系與可匹配機器人自動抓放料機械坐標系之間存在指數關系,RobotKWorld為可匹配機器人自動抓放料動態機械前端坐標系與抓放料自定義世界坐標系之間存在非線性關系,RobotKmachine為可匹配機器人自定義坐標系讀取出機器人自動抓放料動態機械坐標系的位姿。
為了在數控設備上構建自動抓取整體工件原料的數學模型,需要將上述坐標關系建立成關系鏈,用以下數學模型表達所示:
RobotYTmachine=WorldYTmachine·RobotYTtool·toolYTWorld
(1)
以上所示的關系變量中上標表示參考坐標系,下標表示被描述的坐標系,K為3×3矩陣,說明2個坐標系之間存在上下波動關系。以上是可匹配機器人自動抓放料數學模型。其中,RobotYTmachine是從實際操作抓放料作業中獲得的已知量,WorldKmachine在坐標系之間的線性優化關系中計算得來,由動態機械工具坐標系位姿計算得來,toolKWorld由對可匹配機器人非線性分析求解獲得。
2.2 迭代自動抓放料數學模型
由上述獲得的數學模型可以看出可匹配機器人自動抓放料自定義世界坐標系與動態機械工具坐標系之間的位姿關系,求解之后得到以下的數學模型:
x1o1z1=RobotYTmachinex2o2z2
(2)
使用高斯牛頓法,求解可匹配機器人自動抓放料數學模型。高斯牛頓法主要是利用泰勒級數展開式來近似地代替可匹配機器人自動抓料和放料數學模型,進行多次迭代并修正回歸系數,使得可匹配機器人自動抓放料數學模型,獲取最小的殘差平方和。
假設初值為x0,對函數f(xi)進行一階泰勒展開得到:
f(xi)=f(x0)+J(x0)(x-x0)
(3)
針對第i次迭代,得到雅克比矩陣及函數的值為J(xi),f(xi),求出增量方程為:
JT(xi)J(xi)Δx=-JT(xi)J(xi)
(4)
得到:
Δx=-(JT(xi)J(xi))-1JT(xi)f(xi)
(5)
當Δx<0時,迭代停止。高斯牛頓法迭代過程如圖5所示。

圖5 高斯牛頓法迭代過程
針對可匹配機器人自動抓放料自定義世界坐標系,或者機器人動態機械工具坐標系和其他夾具,可得到機器人動態機械中心控制工具坐標系與可匹配機器人自動抓放料自定義世界坐標系之間的非線性關系。通過HIP示教器,給定可匹配機器人自動抓放料位姿,將工件原料和已加工工件成品存儲在放料臺。由此可以得到可匹配機器人自動抓放料動態位姿與動態機械自定義坐標系之間的關系,讀取出機器人工具坐標,以及機器人自動抓放料自定義世界坐標。
3 實現可匹配機器人高精度自動抓放料
由于可匹配機器人自動抓放料的定位時,引入較多的動態機械前端重疊復位誤差,且HIP數控機短小的原因,在最小值到點誤差的條件下,機器人的夾具會超出使用范圍,因此利用動態機械工具位姿來調整機器人自定義世界坐標系位姿。
理想狀態下工具坐標系相對世界坐標系,bB=bA=1,bO=60 mm,當bA<0,應使機器人夾具環繞旋轉校正,如果2個坐標系之間的歐式距離在65 mm之間,則機器人不能自動完成抓放料動作,因此本文對其坐標進行誤差校正,使其位姿距離在65 mm以上,可匹配機器人就會自動完成抓放料操作。上下料過程如圖6所示。
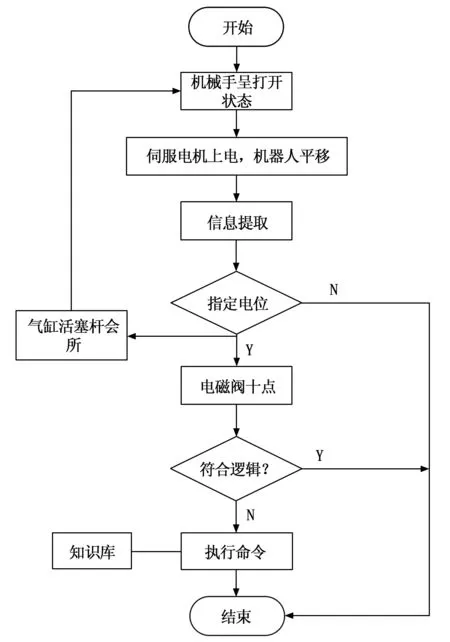
圖6 上下料過程
根據工件原料以及車間環境的實際情況,需要對抓放料裝置做一定調整,以確保實現可匹配機器人高精度自動抓放料。在實際操作過程中需要計算出機器人的偏差數據,花費一定的時間通過校正方式進行調整和修改,也可直接設定參數和具體實施數據。在可匹配機器人抓放料出現操作誤差后,可能會出現工件松動、滑落、工件成品、未及時取出等情況,要及時停機并在顯示屏上查找出現故障的原因,以便快速排除。在可匹配機器人進行自動抓放料時,添加顯示動態窗口,及時檢測操作過程中可能遇到的障礙物,根據動態窗口下達的指令選擇最優路徑從而避開障礙物,在具體工作中這種操作方案可靠性高,效率高。由坐標關系得出的誤差數據保存于cet文本文件,獲取位姿參數拾取導航信息,方便獲取可匹配機器人自動抓放料的高精度閾值,以此實現可匹配機器人高精度自動抓放料。
4 實驗結果與分析
為了驗證基于高斯牛頓法的可匹配機器人高精度自動抓放料方法的有效性,搭建實驗平臺。實驗平臺如圖7所示。

圖7 實驗平臺
設置實驗設備和參數如表1所示。

表1 實驗設備和參數設置
根據圖7實驗平臺與表1實驗設備和參數的設置,進行可匹配機器人高精度自動抓放料實驗,具體的實驗步驟如下:
1)首先打開實驗臺電源,輸入高斯牛頓法,連接程序編程器與控制器,使抓放料機械臂呈現打開狀態;
2)通過伺服電機上電,實現機器人平移;
3)提取工件原料和工件成品位置信息,判斷指定電位,調節電磁閥位置,通過氣缸活塞桿運動,實現工件原料的抓料和工件成品的放料。
分別采用所提方法、文獻[4]方法和文獻[5]方法,對比不同方法的抓料和放料準確率以及抓料和放料次品率,以驗證所提方法的有效性。
采用所提方法、文獻[4]方法和文獻[5]方法對工件原料進行抓取,得到不同方法的抓料精度對比結果如圖8所示。

圖8 不同方法的抓料精度對比結果
根據圖8可知,當工件原料數量為600個時,文獻[4]方法的平均抓料準確率為78%,文獻[5]方法的平均抓料準確率為67%,而所提方法的平均抓料準確率為92%。由此可知,所提方法的抓料精度較高。
在此基礎上,分別采用所提方法、文獻[4]方法和文獻[5]方法對工件成品進行放置,得到不同方法的放料精度對比結果如圖9所示。
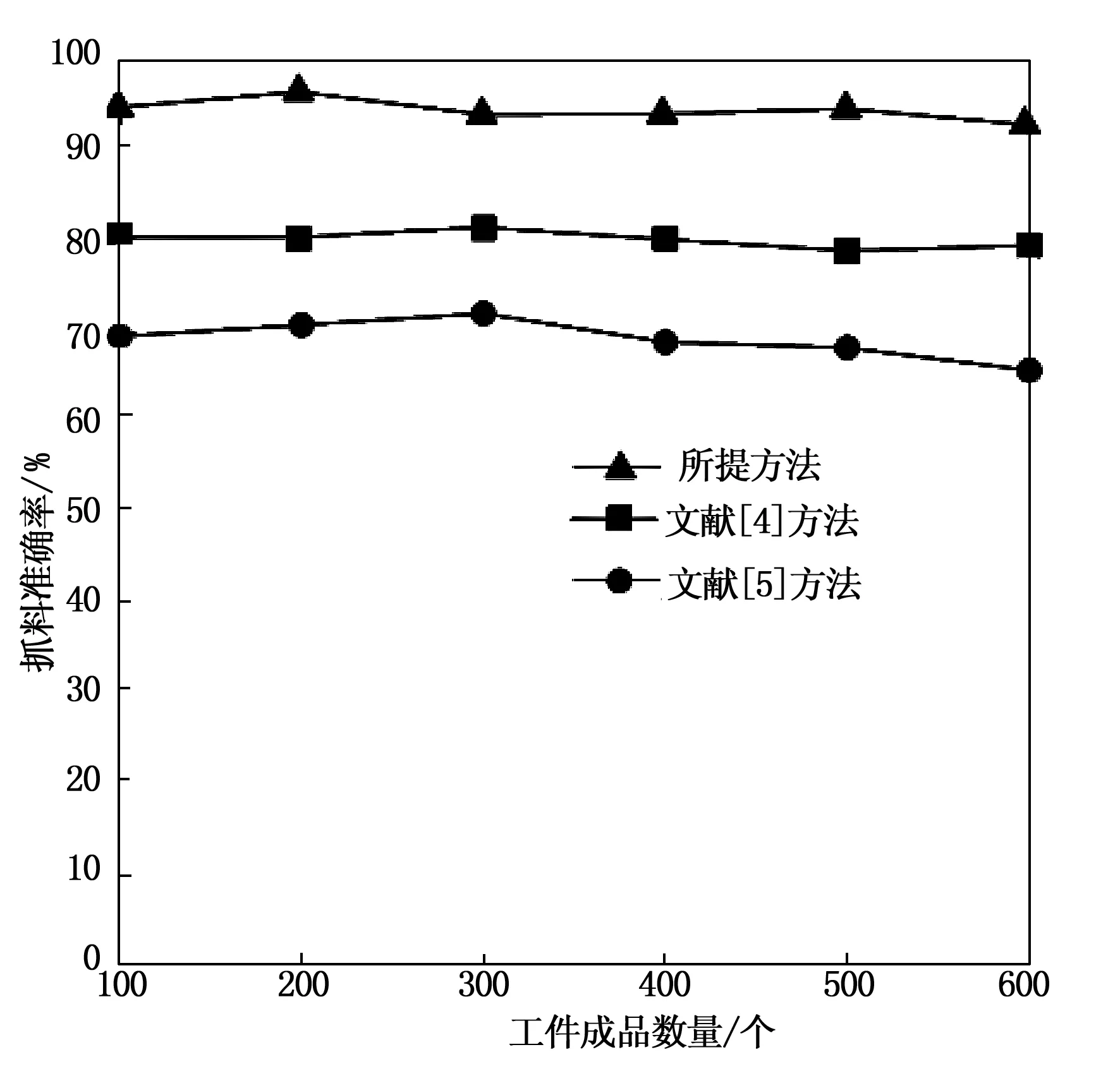
圖9 不同方法的放料精度對比結果
根據圖9可知,當工件成品數量為600個時,文獻[4]方法的平均放料準確率為80%,文獻[5]方法的平均放料準確率為79%,而所提方法的平均放料準確率為95%。由此可知,所提方法的放料精度較高。
為了進一步驗證基于高斯牛頓法的可匹配機器人高精度自動抓放料方法在抓料和放料過程中的次品率,分別采用所提方法、文獻[4]方法和文獻[5]方法對工件原料進行抓取,得到不同方法在抓料過程中的次品率對比結果如表2所示。

表2 不同方法的抓料過程中次品率對比結果
根據表2中的數據可知,隨著工件原料數量的增加,不同方法的抓料過程中次品率隨之提高。當工件原料數量增加至600個時,文獻[4]方法的抓料過程中次品率為6.12%,文獻[5]方法的抓料過程中次品率為2.59%,而所提方法的抓料過程中次品率僅為0.89%。由此可知,相比于文獻[4]方法和文獻[5]方法,所提方法的抓料過程中次品率較低。
在此基礎上,分別采用所提方法、文獻[4]方法和文獻[5]方法對工件成品進行放置,得到不同方法在放料過程中的次品率對比結果如表3所示。

表3 不同方法的放料過程中次品率對比結果
根據表3中的數據可知,隨著工件成品數量的增加,不同方法的放料過程中次品率隨之提高。當工件成品數量增加至600個時,文獻[4]方法的放料過程中次品率為4.98%,文獻[5]方法的放料過程中次品率為2.29%,而所提方法的放料過程中次品率僅為0.64%。由此可知,相比于文獻[4]方法和文獻[5]方法,所提方法的放料過程中次品率較低。
綜上所述,基于高斯牛頓法的可匹配機器人高精度自動抓放料方法的抓料和放料精度較高,能夠有效降低抓料和放料過程中次品率。
5 結束語
針對當前機器人自動抓料和放料裝置的抓放精度較低,抓放過程的次品率較高的問題,提出了基于高斯牛頓法的可匹配機器人高精度自動抓放料方法。通過設計可匹配機器人自動抓料和放料裝置,構建可匹配機器人自動抓放料數學模型,采用高斯牛頓法,迭代求解可匹配機器人自動抓放料數學模型。利用動態機械工具位姿,校正可匹配機器人自動抓放料誤差,實現可匹配機器人高精度自動抓放料。所提出的基于高斯牛頓法的可匹配機器人高精度自動抓放料方法能夠有效提高抓放料精度,降低抓放料過程中次品率。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56