天璣骨科手術機器人在青少年特發性脊柱側彎手術患者中的臨床應用
2021-10-20 00:58:10曹正霖禤天航于淼羅榮森陸偉豪
醫療裝備 2021年17期
關鍵詞:手術
曹正霖,禤天航,于淼,羅榮森,陸偉豪
佛山市中醫院骨一科 (廣東佛山 528000)
青少年特發性脊柱側彎手術治療被稱為脊柱外科手術“皇冠上的明珠”,其難度及技術要求屬脊柱外科最高水平,也是目前研究的熱點與難點。對于脊柱外科手術醫師而言,術中安全、有效地放置椎弓根螺釘具有相當大的挑戰性,因此,目前該手術的開展僅局限在脊柱外科技術水平成熟的地區醫院。但隨著計算機輔助領域、導航領域及3D打印領域的發展,以上輔助置釘裝置或方式均可在一定程度上提高置釘準確率,但是均具有自身領域的局限性,導致實際置釘準確率欠佳。本研究使用天璣骨科手術機器人輔助青少年特發性脊柱側彎患者進行椎弓根螺釘的置放,并與傳統置釘技術比較,分析使用天璣骨科手術機器人輔助青少年特發性脊柱側彎患者進行椎弓根螺釘置放的優勢與特點,旨在為臨床提供依據,現報道如下。
1 資料與方法
1.1 一般資料
選取2016年1月至2019年1月佛山市中醫院骨一科收治的30例青少年特發性脊柱側彎患者,隨機分為試驗組和對照組,各15例。試驗組男9例,女6例;平均年齡(16.08±2.31)歲;Lenke分型,1AN型10例,5CN型5例。對照組男10例,女5例;平均年齡(16.16±2.26)歲;Lenke分型,1AN型11例,5CN型4例。兩組一般資料比較,差異無統計學意義(P>0.05),具有可比性。所有病例均需完善全脊柱正側位片、Bending位片、螺旋平掃三維CT、胸腰椎MRI等檢查,同時需簽署知情同意書及倫理同意書后方可納入研究,接受詳細的術前評估后行后路椎弓根螺釘內固定矯形術,且手術由本科同一位醫師經過培訓后完成。
納入標準:患者脊柱存在嚴重的外觀畸形,有明確的手術意愿,按Lenke 分型需行內固定矯形術治療;脊柱全長正側位X 線片示冠狀位Cobb 角>40°,不伴椎管狹窄,無椎體畸形;全身情況耐受手術,無嚴重心、腦、肺等臟器疾病及血管疾病。排除標準:先天性脊柱側彎;MRI 示脊髓髓內信號異常改變;退變性脊柱側凸;強直性脊柱炎并伴嚴重骨質疏松癥;無需內固定矯形;合并神經纖維瘤;患有其他嚴重的疾病,無法耐受手術;不能堅持接受整個臨床試驗。
1.2 方法
1.2.1 術前準備及規劃
試驗組:完善CT 掃描+重建并將CT 資料導入天璣骨科手術機器人系統進行術前規劃;測量并選擇合適長度、直徑的螺釘及理想的進釘點和進釘方向,反復確認螺釘位置,避免置釘破壞椎弓根內、下壁骨皮質。
對照組:根據術前影像學資料在影像歸檔和通信系統(picture archiving and communication system,PACS)上測量螺釘長度、直徑及理想的進釘點和進釘方向。
1.2.2 手術過程
試驗組:在神經電生理監測下,對患者行氣管插管全身麻醉后使其俯臥于手術床上,腹部騰空,行常規消毒、鋪巾,并予以天璣骨科手術機器人操作臂戴上無菌套,切開皮膚、皮下及筋膜層,剝離椎旁肌,充分暴露至雙側小關節突及橫突;對手術機器人的“天眼”定位裝置進行校對,成功后使用棘突夾固定棘突,隨后借助三維CT進行掃描,分析并生成患者脊柱數據與術前數據進行匹配,并在天璣系統上規劃進針點及釘的大小、角度、路線等,規劃好后用天璣系統自動移動機械臂,在機械臂前端裝上導向針套管,之后在系統上自動控制機械臂到規劃好的進針點處并按照規劃的路線進行開路、進針及置釘,確認位置良好后將胸腰椎及部分腰椎(視頂椎情況而定)小關節鑿除,于雙側放置長棒并進行撐開加壓旋轉矯形,在鑿開的小關節處置入自體骨和同種異體骨并打實,放置明膠止血,沖洗傷口,放置引流管,然后逐層關閉手術切口。
對照組:在神經電生理監測下,對患者行氣管插管全身麻醉后使其俯臥于手術床上,腹部騰空,行常規消毒、鋪巾,選取合適的后正中切口,切開皮膚、皮下及筋膜層,剝離椎旁肌,充分暴露至雙側小關節突及橫突;根據術前影像學資料及術中C 型臂機透視結果進行內固定椎弓根螺釘置入術,并將胸腰椎及部分腰椎(視頂椎情況而定)小關節鑿除,于雙側放置長棒并進行撐開加壓旋轉矯形,在鑿開的小關節處置入自體骨和同種異體骨并打實,放置明膠止血,沖洗傷口,放置引流管,然后逐層關閉手術切口。
1.2.3 術后處理
兩組術后均行抗感染、止痛、脫水等對癥支持治療,術后第2天拔除引流管,復查全脊柱正側位片及CT 掃描,第3天佩戴支具逐步起床活動,7~10 d 出院(視傷口情況而定),3、6個月回院復查脊柱正側位片及CT 掃描,短期隨訪期為1年。
1.3 觀察指標
(1)比較兩組手術完成情況及術中和術后神經脊髓損傷、大出血、螺釘斷裂等不良事件發生情況。(2)比較兩組手術時間、術中透視次數、置釘時間、手術出血量。(3)比較兩組術后疼痛程度[采用視覺模擬評分法(visual analogue scale,VAS)評估,即使用一條長約10 cm 的游動標尺,一面標有10個刻度,兩端分別為0分端和10分端,0分表示無痛,10分代表難以忍受的最劇烈的疼痛,評分越高疼痛越劇烈]及末次隨訪脊柱功能[采用Oswestry 功能障礙指數(Oswestry dability index,ODI)問卷表評估,包含疼痛強度、生活自理、提物、步行、坐位、站立、干擾睡眠、性生活、社會生活及旅游10個問題,每個問題6個選項,每個問題的最高得分為5分,即選擇第一個選項得分為0分,依次選擇最后一個選項得分為5分,若10個問題都做了問答,則記分方法為:實際得分/50(最高可能得分)×100%,若有一個問題沒有回答,則記分方法為:實際得分/45(最高可能得分)×100%,ODI 數值越高表明功能障礙越嚴重],并通過術前和術后全脊柱正側位片比較兩組Cobb 角并計算出其改善情況。(4)比較兩組置釘準確率,即通過術后CT 評估椎弓根螺釘位置,根據R 氏分類法,對椎弓根螺釘是否穿破內壁進行評估,A 型為完全在椎弓根內,B 型為穿破內壁<2 mm,C 型為穿破內壁2~4 mm,D 型為穿破內壁>4 mm,其中A 型和B 型為椎弓根螺釘位置準確[1]。
1.4 統計學處理
2 結果
2.1 兩組手術完成情況及術中和術后不良事件發生情況比較
兩組均能按計劃完成手術治療,術中和術后并未出現神經脊髓損傷、大出血、螺釘斷裂等嚴重不良事件。
2.2 兩組手術時間、術中透視次數、置釘時間及手術出血量比較
試驗組手術時間及置釘時間均短于對照組,術中透視次數及手術出血量均少于對照組,差異有統計學意義(P<0.05),見表1。
表1 兩組手術時間、術中透視次數、置釘時間及手術出血量比較(±s)

表1 兩組手術時間、術中透視次數、置釘時間及手術出血量比較(±s)
手術出血量(ml)試驗組 15 243.41±71.23 12.23±2.34 42.34±20.22 622.34±223.57對照組 15 298.68±73.43 16.45±3.19 58.43±22.43 963.28±322.47 t 2.0924 4.1312 2.0636 3.3652 P 0.0456 0.0003 0.0484 0.0022組別 例數 手術時間(min)術中透視次數(次)置釘時間(min)
2.3 兩組術后疼痛程度、末次隨訪脊柱功能、術前和術后Cobb 角及其改善情況比較
兩組術后VAS 評分、末次隨訪ODI、術前和術后Cobb 角及其改善情況比較,差異均無統計學意義(P>0.05);兩組術后Cobb角均優于術前,差異有統計學意義(P<0.05),見表2。
表2 兩組術后疼痛程度、末次隨訪脊柱功能、術前和術后Cobb 角及其改善情況比較(±s)
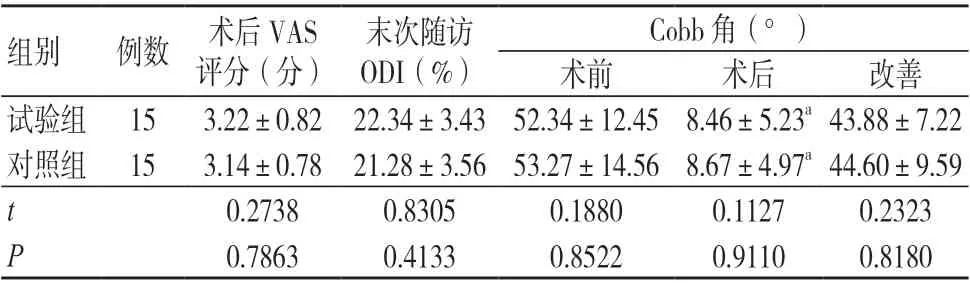
表2 兩組術后疼痛程度、末次隨訪脊柱功能、術前和術后Cobb 角及其改善情況比較(±s)
注:與同組術前比較,aP<0.05;VAS 為視覺模擬評分法,ODI為Oswestry 功能障礙指數
Cobb 角(°)術前 術后 改善試驗組 15 3.22±0.82 22.34±3.43 52.34±12.45 8.46±5.23a 43.88±7.22對照組 15 3.14±0.78 21.28±3.56 53.27±14.56 8.67±4.97a 44.60±9.59 t 0.2738 0.8305 0.1880 0.1127 0.2323 P 0.7863 0.4133 0.8522 0.9110 0.8180組別 例數 術后VAS評分(分)末次隨訪ODI(%)
2.4 兩組置釘準確率比較
本研究試驗組置釘212枚,對照組置釘217枚;試驗組置釘準確率高于對照組,差異有統計學意義(P<0.05),見表3。

表3 兩組置釘準確率比較
3 討論
青少年特發性脊柱側彎的手術難度及危險性高,因為除了脊柱側凸、椎體旋轉外,還存在各種椎弓根變異,導致置釘容易偏離理想釘道,尤其是上位胸椎置釘,相關研究報道,胸椎椎弓根螺釘的誤置率高達6.0%~54.7%[2];加之椎弓根存在個體差異,尤其依賴醫師經驗,因此,脊柱骨科年輕醫師在做好該手術方面成長得相對緩慢;若置釘位置不良,可能會影響矯形效果,尤其是在行螺釘加壓、撐開時可能對脊髓神經造成擠壓甚至損傷,并且在旋轉連接棒時可能造成螺釘松動,影響矯形效果;此外,側彎矯形手術時間往往較長,存在醫師容易操作疲勞、為取得良好的置釘位置過多受到術中輻射等一系列問題;因此,精確、安全、簡單、快速地完成側彎矯形手術,一直是脊柱骨科研究的難題。
鑒于此,醫學上逐步出現各種輔助技術,包括交互式醫學圖像控制系統(Materialise's interactive medical image control system,MIMICS)輔助技術、骨科導航輔助技術、3D打印輔助技術等,均可在一定程度上提高手術精確度,但也存在缺點,如操作時過于依賴醫師的經驗,尤其是不能“解放”醫師雙手。近年來,手術機器人技術發展迅速,具有廣闊的應用前景,其中,骨科手術機器人是在工業機器人的基礎上逐步發展而來的,早在1985年,美國洛杉磯的紀念醫學中心即開展了全球第1例機器人手術[3],該機器人由工業機器人改造而來用于行腦部活檢手術;而在人體上完成整個手術過程的機器人,則是1991年由倫敦帝國學院研制的Probot機器人進行的尿道前列腺切除術[4];目前,全球應用最廣泛的機器人是達芬奇手術機器人系統[5],其可將控制臺上手術醫師手、腕和手指的運動實時按比例縮小轉換為床旁機械臂系統的手臂運動,并且過濾掉操作者手部震顫情況,同時通過內鏡將手術區的手術情況反映在操作者視野中,其目前主要被應用于泌尿外科、心胸外科、婦科等具有腔隙的人體組織結構,但關于被應用于骨科的相關研究報道較少。骨科Robodoc手術機器人[6]最早于1992年被臨床應用于全髖關節置換術,但骨科手術機器人在脊柱領域尤其是脊柱側彎領域的研究進程較為緩慢,目前,主要的研究在于如何提高椎弓根螺釘置入精度、減少血管神經損傷及醫患輻射等;同時,骨科手術機器人也被用于病理活檢、椎體成形術、局部封閉術及脊柱內鏡等手術。常見的骨科手術機器人包括以色列Mazor公司的Spine Assist/Renaissance、韓國的SPINEBOT、德國的Vector Bot和瑞士的Neuroglide等[7-9],國內有學者將Renaissance系統應用于脊柱側彎矯形手術中取得了良好的效果,相較于傳統的側彎矯形手術,于機器人輔助下進行手術具有手術置釘時間及出院時間短、置釘精度高、手術出血量少等優點[10-11]。
北京積水潭醫院田偉教授團隊[12]發明的天璣機器人,是國內唯一獲得原國家食品藥品監督管理總局認可上市的機器人,其體積小,圖像匹配準確,通過光學感應器準確感應精準位置,并在輔助軟件上進行3D成型,準確規劃出置釘路線,目前已被多家醫院逐步引入使用,具有廣闊的應用前景。本研究使用該款機器人進行脊柱側彎手術,發現其優勢如下:(1)具有較高的精確度[12-13],其誤差僅1 mm左右,有學者應用該款機器人行脊柱側彎手術,其精準率為95.30%~98.95%,本研究的置釘準確率為95.28%,與以往研究報道相似[10-11],且相較于傳統的置釘技術(80.18%)優勢明顯,同時,我們還發現,應用該款機器人置釘未在術中進行不良位置的內固定調整,而有2例行傳統置釘技術的患者在行胸椎置釘時螺釘漂出椎弓根外側,需要反復調整,導致手術時間延長,同時在后續加壓撐開操作中考慮到調整后螺釘把持力可能欠佳未對螺釘進行過多操作,因此對矯形效果造成了一定的影響;(2)手術過程在視覺上更立體,更容易掌控,天璣機器人系統可多角度逼真重建術中即時置釘效果,具有三維可視圖像,置釘者在機器人輔助下置釘更從容,同時可避免操作者在旋轉椎體或由于上胸椎發育異常難以置釘時的緊張情緒,緩解手術疲勞,在一定程度上可縮短置釘時間及手術時間,降低出血率,但是,對于經驗豐富的醫師而言,可以對容易置釘的椎體行傳統的徒手置釘,如此置釘效率會更高,因為我們發現,兩組出現置釘效率欠佳的主要原因在于上胸椎椎體及旋轉明顯的椎體,此時醫師經驗非常重要;(3)可提高年輕醫師對“困難椎”置釘的認識,讓年輕醫師清晰觀察并參與“困難椎”置釘過程,利于年輕醫師置釘技術的提高,突破瓶頸期[14]。當然,該款機器人還存在不足:(1)非全自動化機器人,僅提供置釘導引,還需操作者親自置釘;(2)費用較高,平均一臺手術成本比傳統術式高出2~3萬,難以在基層醫院普及;(3)對于重度畸形多種骨性結構重疊患者,重建圖像欠佳,此時需要更多依賴操作者的豐富經驗,且我們認為,若有條件,結合神經電生理監測及3D打印行術前規劃可能手術更加安全。此外,本研究樣本量少,隨訪時間短,后期還需進一步深入研究探討。
猜你喜歡
環球時報(2022-12-23)2022-12-23 09:28:37
昆明醫科大學學報(2022年1期)2022-02-28 07:45:04
中老年保健(2021年11期)2021-08-22 03:13:36
昆明醫科大學學報(2021年2期)2021-03-29 07:42:46
河北畫報(2020年10期)2020-11-26 07:20:50
小學閱讀指南·低年級版(2017年1期)2017-03-13 20:07:35
中國衛生標準管理(2015年3期)2016-01-14 03:41:47
中國醫療美容(2015年1期)2015-07-12 10:06:38
鄭州大學學報(醫學版)(2015年2期)2015-02-27 14:50:54
西南軍醫(2014年5期)2014-04-25 07:42:48
