輔助手術醫用機器人的基本性能
2021-10-20 00:58:00張洋孟志平劉洋
醫療裝備 2021年17期
張洋,孟志平,劉洋
北京市醫療器械檢驗所電磁兼容室 (北京 101111)
2000年,直覺外科公司(Intuitive Surgical,Inc.)獲得美國食品藥品監督管理局(Food and Drug Administration,FDA)批準,由其生產的Da Vinci 成了第一個腹腔鏡綜合手術機器人系統,自此以后,醫用機器人系統正式開始作為安全有效的先進醫療器械登上為人民群眾健康服務的舞臺。
國務院印發的《中國制造2025》規劃提出了在新形勢下大力發展制造業的十年行動綱領,其中機器人及高性能醫療器械均在十大重點領域之列。《“十三五”規劃綱要》中明確指出,重點發展醫用機器人等高性能診療設備,積極鼓勵國內醫療器械創新,全面提高醫療器械產業化水平。截至目前,我國醫用機器人研發制造水平有了顯著提高。2010年,北京天智航技術有限公司的天璣骨科手術機器人獲得原國家食品藥品監督管理總局批準,成了我國第一個取得醫療器械產品注冊證的手術機器人。作為我國首臺骨科手術機器人產品,天璣適用于脊柱、骨盆髖臼及四肢等13個不同部位,輔助手術精度達到0.82 mm,內固定優良率達到97.1%;同時,天璣易操作,使手術時間縮短了27.1%[1]。2018年,北京柏慧維康科技有限公司的“Remebot”成了國內首家正式獲批的神經外科手術機器人。2020年,由天津大學主持研發的“妙手”微創外科手術機器人已進入臨床評估階段,即將填補國內主從控制醫療手術機器人這一領域的空白。
醫用機器人作為三類醫療器械產品,對其進行注冊管理,在產品全生命周期中必須考慮其對患者、醫師及預期使用醫療環境造成的潛在危害,嚴格管控器械安全性和有效性。本文介紹了醫用機器人的分類及其中輔助手術醫用機器人的基本性能。
1 醫用機器人的分類
醫用機器人是指用于醫院、診所的醫療或輔助醫療機器人,可獨自編制操作計劃,依據實際情況確定動作程序,然后將動作變為操作機構的動作;其可識別周圍情況及自身即機器人的意識和自我意識,從事醫療或輔助醫療等工作[2]。作為醫療器械產品,按預期用途可將其分為輔助手術醫用機器人、康復機器人和診療機器人三類。
1.1 輔助手術醫用機器人
國際電工委員會組織發布的標準IEC 80601-2-77:2019《Medical electrical equipment-Part 2-77:Particular requirements for the BASIC SAFETY and essential performance of ROBOTICALLY ASSISTED SURGICAL EQUIPMENT》[3]給出了輔助手術醫用機器人的相關定義,即其是一種醫用電氣設備,包含由PEMS驅動的裝置,預期用于機器人手術器械的安置或操控。按輔助手術醫用機器人的工作模式,可將其進一步細分為導航定位手術機器人和內鏡手術機器人。
1.1.1 導航定位手術機器人
導航定位手術機器人一般包含以下結構:(1)實時跟蹤裝置,如光學跟蹤設備、磁導航跟蹤設備和光學面掃描建模設備等;(2)機械臂定位裝置;(3)末端器械裝置。術前,通過CT、MRI 等成像設備采集患者病灶部位圖像,醫師據此分離病灶部位邊界,規劃手術路徑,避開重要血管、神經等組織,給出靶點區域及器械入針點,并根據軟件算法,完成患者注冊,對患者坐標系、圖像坐標系、機械臂坐標系進行配準;術中,機械臂按照醫師規劃路徑以規劃入針姿態到達規劃入針點,醫師可根據跟蹤裝置實時獲取器械進入人體的狀態信息。
目前,部分產品已實現“主動約束”功能,能夠根據機器人末端執行器的所處區域(允許運動區域或禁止運動區域),來調控機器人末端的運動狀態[4]。在神經外科手術過程中,可實現對手術區域的主動約束,避免末端器械超出約束區域損傷關鍵血管、神經組織;在骨科手術過程中,對機械臂末端切削設備的主動約束,可實現沿若干事先規劃好的平面修配脛骨和股骨,其中,平面位置與方向的選擇取決于患者的解剖結構。
在臨床上,導航定位手術機器人主要完成骨科關節置換、脊柱矯形和修復、腦部活檢、定點刺激、電極測量、去除囊腫等相關手術。骨科手術導航機器人見圖1。

圖1 骨科手術導航機器人
1.1.2 內鏡手術機器人
微創術式的出現顯著減小了手術創傷、減輕了患者術后疼痛、縮短了住院恢復時間,但與此同時,內鏡手術打破了傳統外科手術于直視下操作的習慣,醫師不能再靠直覺的手眼協調來完成手術,而且長桿狀的手術器械也放大了醫師手部的生理顫抖,極大地增加了手術難度。
內鏡手術機器人的出現解決了以上難題,以直覺外科公司的Da Vinci 為代表。機器人采用主從操作結構,術中醫師可在操作臺端直接獲取經內鏡放大10~15倍的高清三維圖像,據此進行病灶定位和器械操作;機械臂執行端得到操作指令后,濾除人手的自然顫抖,提高手術精準度,以醫師選擇的相應動作比例低延時地完成相應的操作。總之,多種多樣末端器械的存在,使醫師可以輕松完成狹小空間內對病灶的牽拉、切割、縫合等精細操作。
由于采用主從操作這一結構特征,內鏡手術機器人可以完成遠程手術操作,如2001年9月,紐約馬雷斯科教授使用ZEUS機器人為來自法國斯特拉斯堡市的患者實施了膽囊切除術,其即具有劃時代意義的“林白手術”[4]。隨著5G技術的日益成熟,無線傳輸帶寬增加和低延時使遠程手術成為現實。
單孔徑內鏡手術機器人和多孔徑內鏡手術機器人(圖2)成了臨床上內鏡手術機器人的兩個分支,同時末端柔性手術器械設計和力反饋功能的實現成了兩項重要的研究內容。
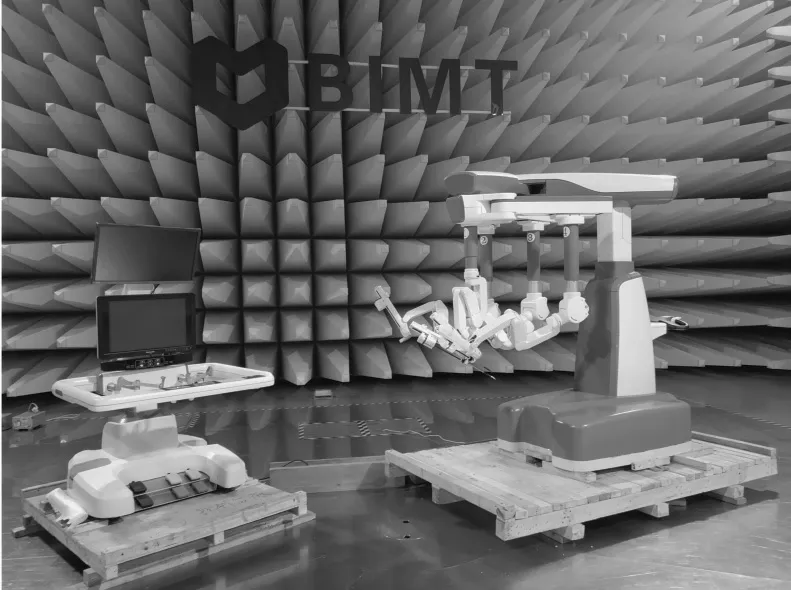
圖2 多孔徑內鏡手術機器人
1.2 康復機器人
國際電工委員會組織發布的標準IEC 80601-2-78:2019《Medical electrical equipment-Part 2-78:Particular requirements for the BASIC SAFETY and essential performance of medical robots for rehabilitation, assessment, compensation or alleviation》[5]給出了康復機器人的4個功能方向:(1)康復,用于改善與患者損傷有關的運動功能的治療;(2)評定,量化或協助量化患者損傷程度的程序;(3)代償,通過身體結構的支承,或者通過身體功能的支承或替換來減輕患者損傷;(4)緩解,用于紓緩患者損傷所引起的癥狀。
康復機器人(圖3)應用中非常重要的特點是機器人與患者在共存環境中的人機交互機制,其通過雙向神經反饋來實現:(1)通過捕獲患者的前向神經信號(腦電信號或肌電信號)實現對康復機器人的直接控制;(2)向患者施加相關感知信號(電刺激等),以實現患者的主觀動作。根據腦神經可塑性理論,通過雙向神經反饋,可取得更好的康復效果。
1.3 診療機器人
非手術診療機器人主要包括放療機器人、影像機器人和膠囊窺鏡機器人等輔助診斷治療的機器人系統。
在放射治療領域,隨著圖像引導放射治療(imageguided radiation therapy,IGRT)技術的成熟,傳統4個自由度的普通放射治療床已經很難達到所需的精度要求,因此引入了6個自由度的放療機器人,配合三維圖像的引導來精確控制放療計量的空間分布,顯示出明顯的精度優勢。在最前沿的質子重離子粒子治療設備中,均采用了6個自由度的放療機器人完成放療計劃,其重復定位精度可達亞毫米級。質子治療設備中的醫用機器人見圖4。

圖4 質子治療設備中的醫用機器人
數字減影血管造影(digital substraction angiography,DSA)設備采用多軸重載機械臂連接C型臂X線球管裝置和平板探測器成像系統,通過機械臂的靈活運動可實現360°全景成像和大范圍3D重建,提升圖像質量,臨床可將其用于心血管、神經系統及全身血管造影和介入治療手術中。血管造影X線成像系統見圖5。

圖5 血管造影X 線成像系統
2 輔助手術醫用機器人的基本性能
我國的注冊體系要求醫療器械產品取得產品上市許可注冊證前需完成相應的型式檢驗,檢驗內容包括性能檢測、電氣安全檢測、電磁兼容檢測等。制造商首先應通過風險分析的相關辦法明確產品基本性能相關內容,并解釋該功能不可接受的風險。
最新發布的GB 9706.1-2020《醫用電氣設備 第1部分:基本安全和基本性能的通用要求》[6]給出了基本性能的定義,即與基本安全不相關的臨床功能的性能,其喪失或降低到超過制造商規定的限值會導致不可接受的風險。定義醫療器械基本性能的出發點是制造商必須在設計產品時考慮由于臨床功能相關的性能出現問題(故障)時引起的安全風險給患者帶來的不可逆危害,而以往醫療器械僅強調由于設計、結構、安全指標本身不符合通用安全要求而引起的安全風險。
對于輔助手術醫用機器人產品,國際電工委員會組織發布的標準IEC 80601-2-77:2019《Medical electrical equipment-Part 2-77:Particular requirements for the BASIC SAFETY and essential performance of ROBOTICALLY ASSISTED SURGICAL EQUIPMENT》[3]給出了兩條基本性能補充信息(圖6):(1)當執行外科手術所必需的信息退化時,能夠確保無不可接受的風險;(2)當機器人手術器械的運動控制性能降低時,能夠確保無不可接受的風險。其中,手術過程中所必需的信息指用于做出臨床決策或影響臨床行為或結果的任何數據,包括但不限于:(1)視覺信息,如視頻或其他基于圖像的數據;(2)計算信息,如輔助手術醫用機器人施加的虛擬邊界、手術器械的跟蹤定位信息;(3)觸覺信息,如輔助手術醫用機器人提供的觸覺反饋。信息退化的示例包括但不限于:(1)內鏡圖像不是實時圖像或其延遲不可接受;(2)位置追蹤信息由于追蹤標記在追蹤攝像機中被遮擋而中斷;(3)位置追蹤信息因患者追蹤標記的移動而受損;(4)由于CT圖像噪聲過大或MRI圖像扭曲,使3D骨骼模型無法精確地表達患者的解剖結構,導致配準精確度下降。機器人手術器械的運動控制包括以下幾項:(1)限制機器人手術器械的運動范圍,如虛擬邊界;(2)改變操作者的輸入與輔助手術醫用機器人輸出的機器人手術器械運動之間的速度和距離比,如震顫衰減;(3)包括一些機器人手術器械的自動功能,如自動器械對齊或切割工具的扭矩衰減;(4)對準并保持機器人手術器械相對于患者解剖結構的位置,并補償患者的運動,如內鏡把持;(5)在無操作者輸入的情況下直接引起機器人手術器械的運動。機器人手術器械的運動控制性能下降示例包括但不限于:(1)機器人手術器械的定位和速度相對于操作者輸入的延遲;(2)機器人手術器械的位姿與計算的路徑、表面或靜態位置的偏差。機器人手術器械的運動控制對于輔助手術醫用機器人執行其預期功能至關重要,因此宜為每個輔助手術醫用機器人制定有關運動控制的基本性能;特定的基本性能要求將取決于輔助手術醫用機器人的預期用途。
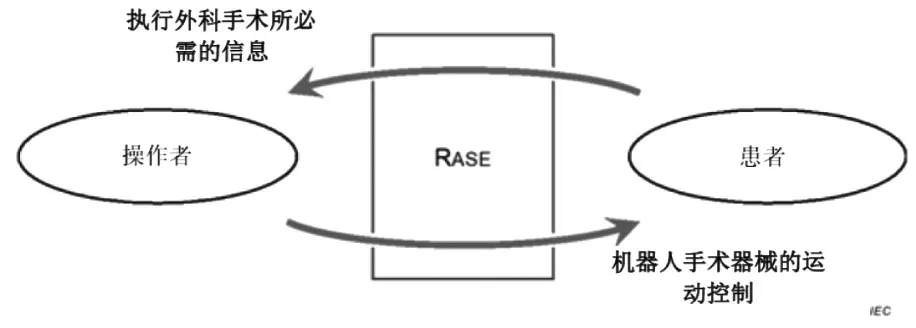
圖6 輔助手術醫用機器人的典型基本性能項目
在實際的型式檢驗中,因醫療器械產品臨床功能的實現方式不同,風險分析不同,基本性能也不相同。
2.1 導航定位手術機器人的基本性能
對于導航定位手術機器人的基本性能,應從精度的準確性、手術過程重要信息的顯示、機械臂的運動控制、末端執行工具功能的實現等方面考慮。
定位精度可詳細分解為機械臂的位置準確度、位置重復性、跟蹤定位裝置的準確度、導航引導功能實現下的系統精度。機械臂的位置精度測試方法可參考GB/T 12642-2013《工業機器人 性能規范及其試驗方法》[7]來進行,測試過程中需引進第三方三坐標精度測量設備(如激光跟蹤儀或三坐標測量儀)來完成對機械臂末端位置和姿態信息的采集,通過計算得出準確度和重復性的具體量化指標。激光跟蹤儀測量位姿的準確度和重復性見圖7。

圖7 激光跟蹤儀測量位姿的準確度和重復性
系統精度的測量需制造商根據樣機臨床功能的實現,制備相應的測試工裝。系統精度測試工裝見圖8。

圖8 系統精度的測試工裝
手術過程重要信息的顯示可分解為實時導航顯示信息準確、無圖像凍結、無數據丟失、無產生風險的延時等。
機械臂的運動控制可分解為機械臂運動受控、無非預期的移動、緊急狀態下可快速離開患者表面等。對于一些在機械臂末端增加有源工具(如骨科手術中的切削刀具)的導航定位手術機器人,其新加工具臨床功能帶來的風險也應由制造商進行風險分析,在基本性能的確認中加以考慮。
2.2 內鏡手術機器人的基本性能
對于內鏡手術機器人的基本性能,應從主從操作距離準確度和距離重復性、主從操作姿態準確度和姿態重復性、主從延時時間、手術過程重要信息的顯示等方面考慮。
在主從操作距離準確度和重復性的測試過程中,引導主端完成一定距離移動并保持,通過測量儀器分別測得主端設備參考點在主端設備基準坐標系下的移動距離以及末端執行器參考點在從端設備基準坐標系下的移動距離,并進行精度計算。其中,主端設備基準坐標系是根據術者觀察監視器的視線方向確定的,從端設備基準坐標系是根據視覺圖像采集設備的觀察平面確定的。主端設備和從端設備的基準坐標系見圖9。
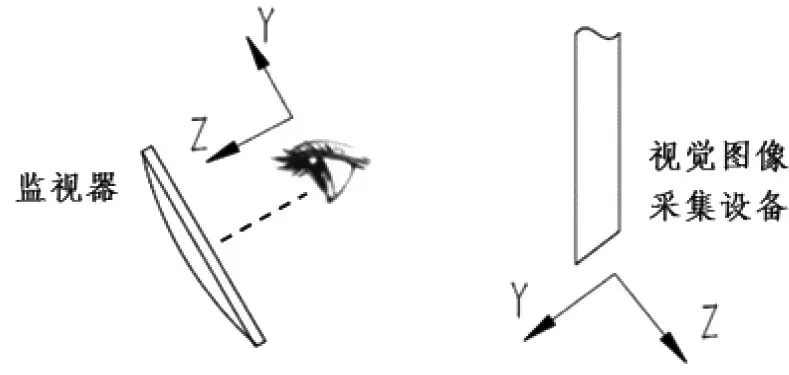
圖9 主端設備和從端設備的基準坐標系示意圖
在主從操作姿態準確度和重復性的測試中,引導主端運動到某一特定點并保持某一姿態,通過測量儀器分別測得主端設備參考點在主端設備基準坐標系下的姿態以及末端執行器參考點在從端設備基準坐標系下的姿態,并進行精度計算。
主從操作準確度測試見圖10。
圖10 主從操作準確度測試
在實際測試過程中,為了保證主端運動的穩定性和可重復性,采用輔助機械臂進行示教規劃運動路徑來牽引主端運動。同時,由于從端設備末端為柔性手術器械,受外力易發生形變,無法直接采用接觸式三坐標測量儀或安裝激光跟蹤儀靶球進行測量,最終選取非接觸式三坐標光學面掃描的方式采集最終位置和姿態信息。
在臨床應用中,足夠小的主從延時時間是醫師完成微創手術的重要保障。測試過程中,使用位移傳感器同時采集主端、從端參考點位移隨時間變化的曲線。其中,主端設備參考點在200 ms 內從靜止加速到80%額定速度,并在80%額定速度下勻速運動指定距離后,在200 ms 內減速到靜止狀態。定義主端設備參考點和末端執行器參考點開始運動的時間差為啟動延時;定義在主端設備80%運動行程內,取主端設備參考點和末端執行器參考點在運動相同位移時的時間差的最大值為跟隨延時。主端設備和末端執行器參考點位置變化曲線見圖11。
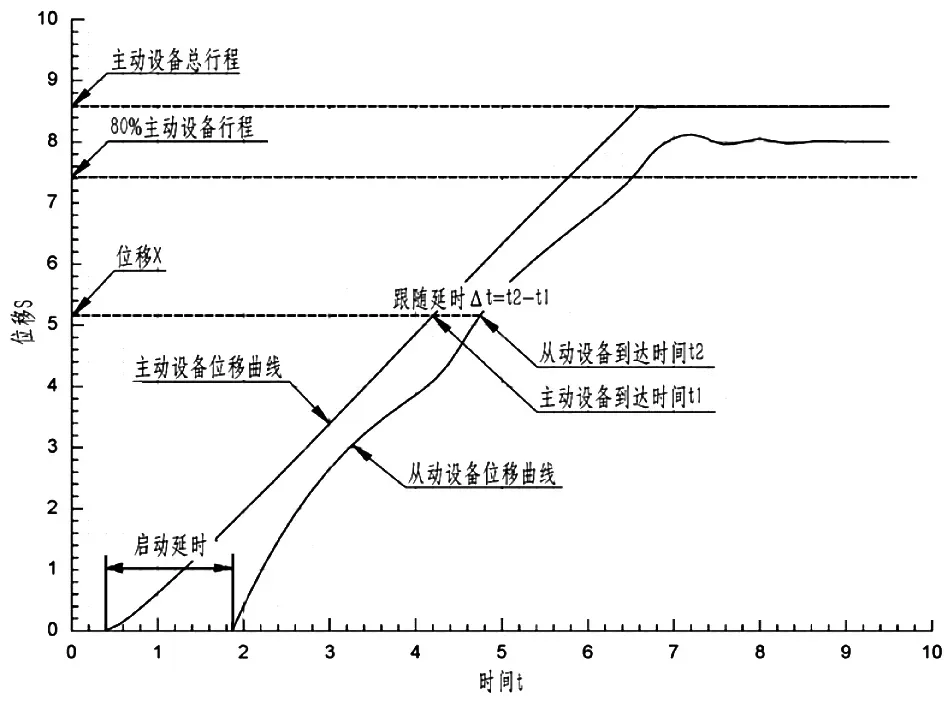
圖11 主端設備和末端執行器參考點位置變化曲線
隨著信息技術的發展,在可能存在的5G、wifi 主從操作端無線通信進行遠程手術的情況下,制造商更應謹慎評估主從延時時間不穩定性帶來的潛在風險。
3 小結
輔助手術醫用機器人作為高風險醫療器械,在產品設計過程中應確保進行完善的風險分析,得出產品基本性能指標,給出避免風險產生的相關措施。
目前,國內對于輔助手術醫用機器人的基本性能和電磁兼容要求還未形成標準化的方案,本文通過分析輔助手術醫用機器人基本性能,歸納總結相關通用性規律,希望為建立輔助手術醫用機器人基本性能標準提供技術支撐。
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
昆明醫科大學學報(2021年2期)2021-03-29 07:42:46
河北畫報(2020年10期)2020-11-26 07:20:50
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
工業設計(2016年12期)2016-04-16 02:52:00
中國衛生標準管理(2015年3期)2016-01-14 03:41:47
設備管理與維修(2015年12期)2015-04-09 06:57:00
消費者報道(2014年7期)2014-07-31 11:23:57
西南軍醫(2014年5期)2014-04-25 07:42:48
