面向旋轉部件傳熱試驗的無線遙測裝置設計
2021-10-26 12:27:28鄧麗君
電子器件 2021年4期
關鍵詞:信號
鄧麗君,黃 勇
(中國航發湖南動力機械研究所,湖南 株洲 412002)
航空發動機運轉中,轉子的溫度分布具有瞬時多變性的特點,導致材料產生周期性彈性變化,直接影響著轉子部件的壽命和發動機的安全。因此,在中小航空發動機熱管理工作中實現對轉子部件實時響應溫度的精確測量十分必要。
傳統的旋轉管溫度采集系統采用電刷傳遞傳感器信號,這種接觸式傳導方式不僅使用壽命短,而且存在不可避免干擾,從而難以獲得準確的溫度值[1-9]。為了解決以上問題,開發了針對旋轉部件的溫度遙測裝置以實現對溫度信號的精確采集,以典型的旋轉管為對象開展了實驗研究,對其可行性進行了驗證。
1 系統總體框圖
系統總體框圖包含3 大部分,分別為發射端、接收端以及上位機數據處理,如圖1 所示。發射端由主控板、熱電偶底板和無線信號發生器組成,包含熱電偶信號采集電路、基于TM4C 的串口電路、無線信號發生器及其驅動電路。接收端包含位于靜端的無線信號接收器和數據轉換模塊。上位機程序主要用于對采集到的數據進行解析存儲。系統中的無線傳輸通道,即無線通訊收發模塊屬于高速電路,其工作頻段為433 MHz,數據傳輸速率為2.4 kbit/s,無線傳輸距離為1 000 m。
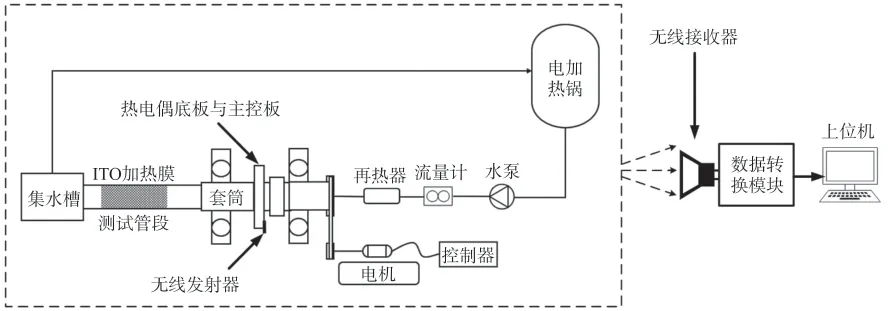
圖1 系統總體框圖
無線遙測裝置電子系統原理如圖2 所示,旋轉熱管溫度采集系統采集的溫度通道數量較多,因此熱電偶底板需要多路數據采集模塊。通過底板與主控板之間的引腳,多個采集模塊采集到的參數被傳輸給主控板。主控板編碼后通過無線模塊將載有遙測參數信息以無線信號形式發射出去。接收端的無線信號接收器接收發射出來的無線信號并輸出相應的TTL 電平信號,數據轉化模塊將TTL 電平轉化成USB 信號,通過USB 串口將遙測數據發送到上位機數據處理。上位機程序將采集到的熱電偶溫度信息進行解析,并以曲線顯示,同時該程序具備數據存儲導出功能。

圖2 無線遙測裝置電子系統原理圖
2 關鍵模塊設計
考慮到無線信號發生器和無線信號接收器等技術較為成熟,本設計著重介紹發射端熱電偶底板、發射端主控板和接收端數據轉換模塊。
2.1 發射端熱電偶底板設計
該模塊需完成對8 路熱電偶信號的采集,考慮到采集參數數量較多,不建議采用Max6675 冷端補償K 型熱電偶數據轉換器,原因是Max6675 芯片數據轉化周期過長,大約為250 ms,不利于實時溫度采集,且多個通道冷端補償不一致,導致多個芯片在同樣的環境溫度和熱端溫度下呈現不同的測量值,誤差較大,不適用于多通道實時溫度采集。因此采用AD623 集成單電源儀表放大器對熱電偶信號進行采樣放大,通過主控板的ADC 模數轉換器實現熱電偶溫度讀取。AD623 可以在單電源(+3 V~+12 V)下提供滿電源幅值的輸出,允許通過使用增益設置電阻進行增益編程,其引腳排列如圖3(a)所示。AD623 可將差分電壓轉化成單端電壓,其輸出電壓為:VO=(1+100 kΩ/RG)VI,其中Ra為1 腳和8 腳之間接入的調壓電阻,所設計的熱電偶信號采樣放大電路如圖3(b)所示。采用AD623 單電源對熱偶信號放大,因共模電壓在0 V 附近,AD623 輸出電壓只能放大到1 V 左右,所以考慮在輸入端增加共模鉗位電壓,鉗位電壓為1 V。此外,熱電偶底板上還設計了環境溫度傳感器,芯片采用LM61 精密集成電路溫度傳感器,其輸出電壓與溫度成線性比例(10 mV/℃),標稱輸出電壓范圍為300 mV 至1 600 mV,適應環境溫度為-30 ℃至100 ℃。
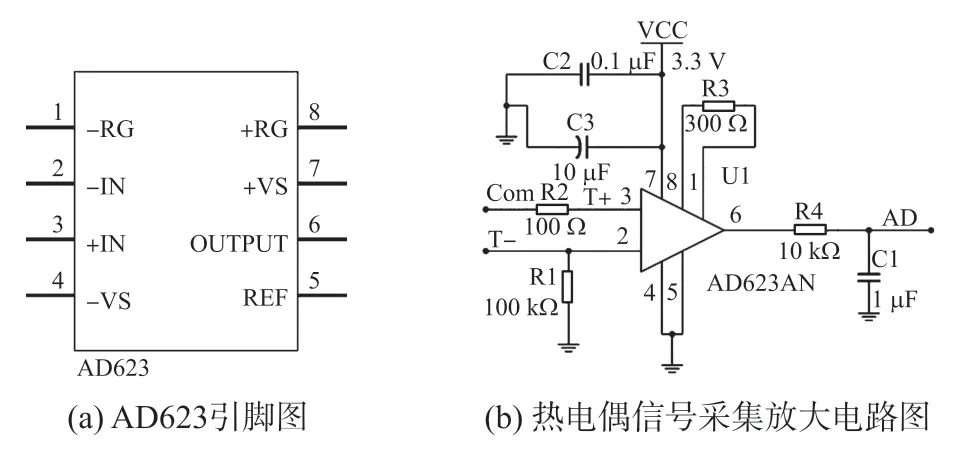
圖3 AD623 引腳圖及熱電偶信號采集放大電路圖
2.2 發射端主控板設計
主控板供電采用鋰電池供電,電源控制IC 采用RT8008-33 芯片,該芯片電壓輸入范圍為2.5 V~5.5 V,輸出電壓固定為3.3 V,支持最大1 A 的輸出電流。主控板與熱電偶底板之間通過2 個20pin 排插連接。熱電偶采樣放大后的信號與環境溫度信號通過排插傳遞到主控板,主控板3.3 V 供電通過排插支持熱電偶底板芯片供電。
主控板芯片采用80 MHz 的ARM Cortex-M4 系列TM4C 芯片,該芯片集成了8 個通用異步收發器(UART)和2 個12 位ADC 模塊。其設計框架如圖4 所示,原理圖如圖5 所示。芯片工作時,ADC模塊采集到底板采樣放大后的多路熱電偶信號,經內部計算將模擬量信號轉化為數字量,通過UART按照一定的發送協議將熱電偶數字量信號發送到無線信號發生器。ARM 編碼流程圖如圖6 所示。

圖4 主控板設計框架
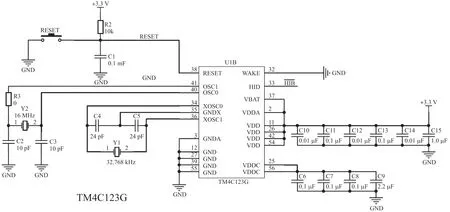
圖5 TM4C123G 原理圖
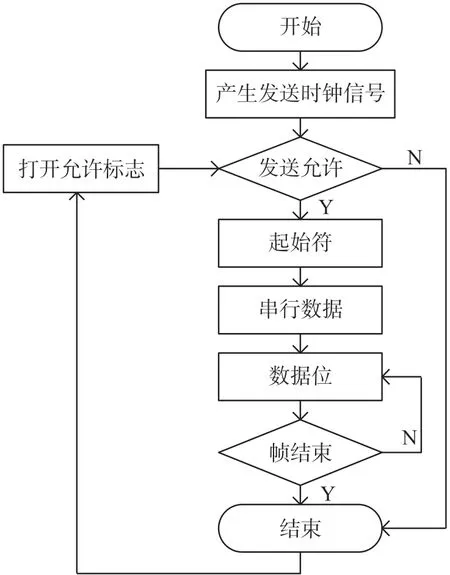
圖6 ARM 編碼流程圖
考慮到多路溫度采集信號數據量較多,主控板內還設計了串行接口的閃存芯片AT45DB161D,該芯片采用2.5 V~3.6 V 單電源供電,兼容SPI 接口,包含1 個主存儲器和2 個SRAM 數據緩存區,共17 301 504 個位,被組織為4 096 個頁,每個頁512或528 個字節,其接口功能如表1 所示。

表1 AT45DB161D 接口功能
2.3 無線收發模塊
無線收發模塊是基于Semtech 公司SX1278 射頻芯片設計的串口模塊,采用LoRa 擴頻技術,工作頻段默認433 MHz,默認空中速率為2.4 kbit/s,發射功率為20 dBm,其電路實物圖如圖7 所示。
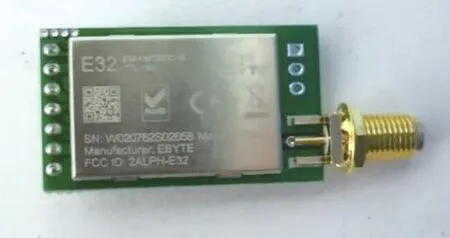
圖7 無線收發模塊電路實物圖
2.4 接收端數據轉換模塊
考慮到無線接收端到上位機之間的數據通訊,故設計了信號轉換模塊,通過信號轉換模塊將無線接受端的串口信號轉換成USB 信號,經計算機的USB 接口上傳至上位機軟件。其實現框圖如圖8所示。
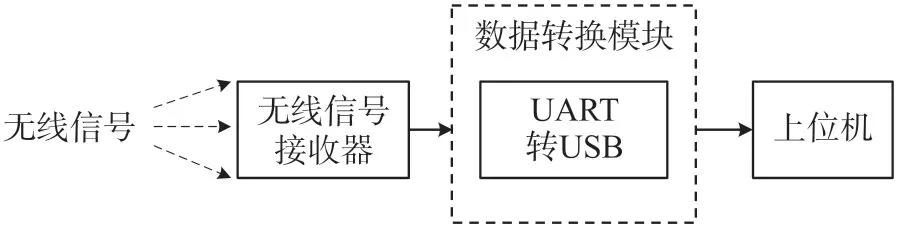
圖8 數據轉換模塊實現框圖
數據轉換模塊基于CP2102 芯片設計了一個簡單的UART-USB 轉換電路,通信速率可達1 Mbit/s,其原理圖如圖9(a)所示,為適應不同的電壓場合,引出GND,TXD,RXD,RST,5 V,3.3 V 接口,外圍電路增加了電源指示燈,方便觀察數據模塊工作狀態,其電路實物圖如圖9(b)所示。

圖9 數據轉換模塊原理圖及電路實物圖
3 上位機設計
上位機的基本界面,如圖10 所示,系統應用程序主要分為5 個部分,分別為圖形顯示部分、通信設置部分、輸入設置部分、數值顯示部分、電池監測部分和操作臺部分。
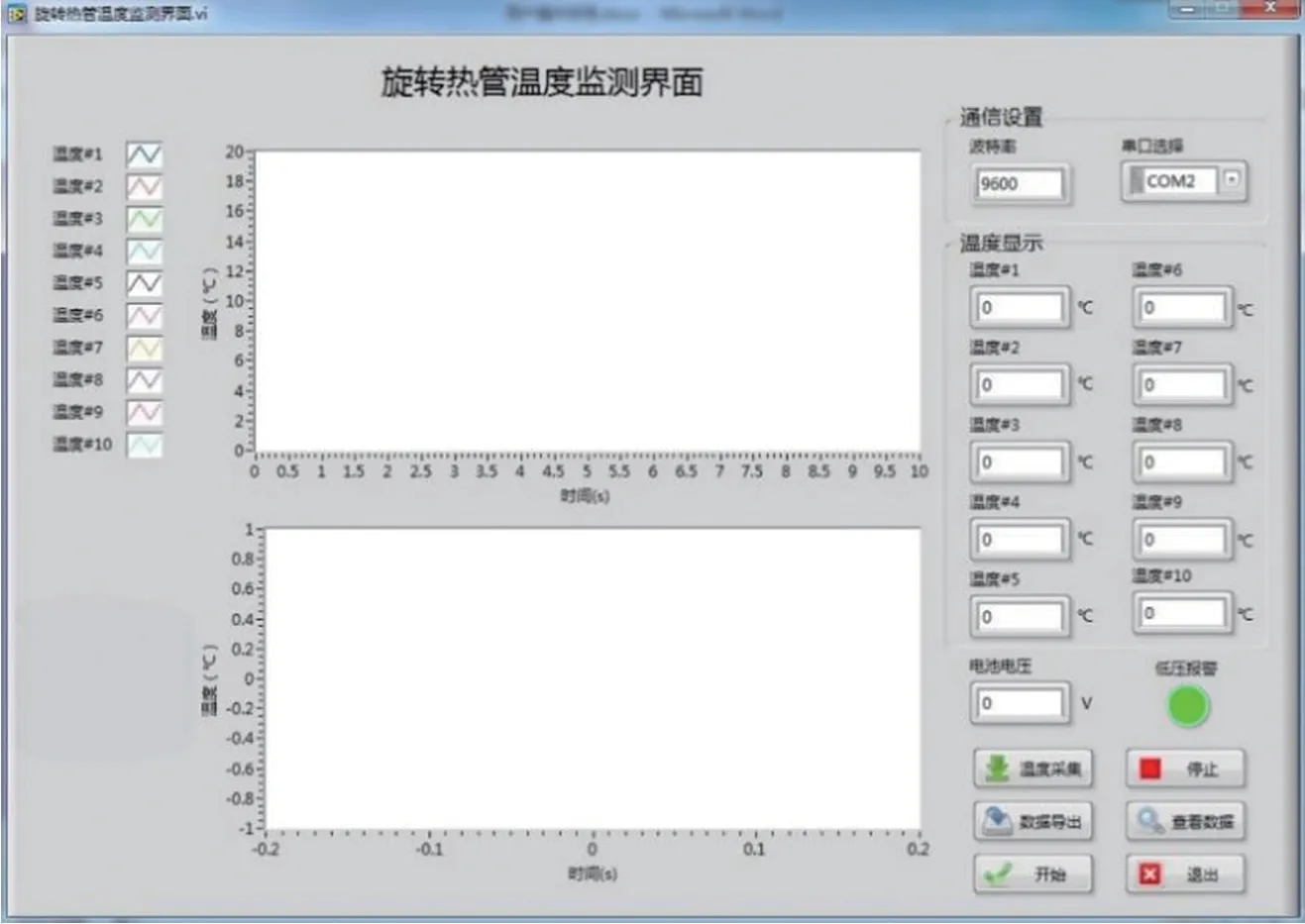
圖10 上位機接收程序界面
上位機工作流程圖如圖11 所示,上位機程序開始運行后打開串口,采集串口數據,對編碼數據進行解析,并以曲線圖形顯示。
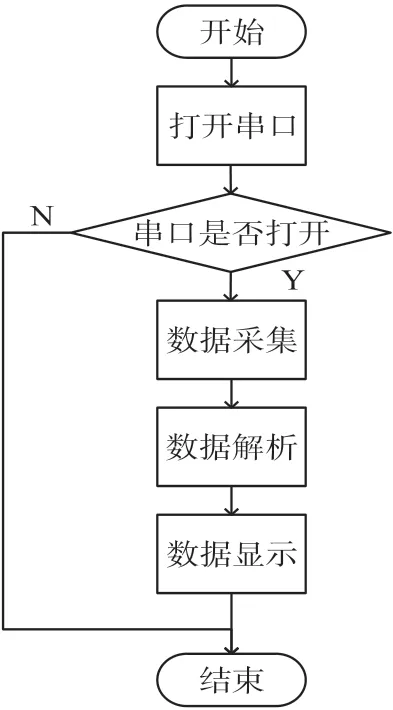
圖11 上位機工作流程圖
(1)圖形顯示:波形圖橫坐標為時間,單位為s,縱坐標為溫度,單位為℃。上方波形圖為局部時間范圍顯示,下方波形圖為全局時間范圍顯示。波形圖最左側有曲線的圖例,表示波形中各個曲線對應的顏色與樣式。
(2)通信設置:其中波特率默認值為9 600,串口默認選擇為COM2。
(3)數據顯示:依次顯示10 個溫度值,精確到小數點后2 位。
(4)電池監測:實時顯示電池電壓值,并設計了低壓報警燈,當電壓低于3.75 V,鋰電池無法提供穩定的主控板供電,會導致主板無法正常工作,熱電偶信號采集數據會出現誤差,此時報警燈變為紅色,提醒更換電池或充電。
(5)操作臺部分:開始和退出按鍵負責軟件的運行和關閉,當按下溫度采集鍵后,軟件開始采集溫度值并在界面上顯示,同時自動將文件進行保存。按下停止后軟件暫停接收并保存溫度數據,此時若再按下溫度采集,則重新進行文件保存。點擊數據導出后,主控板上Flash 中存儲的數據會傳給PC機,在顯示溫度的同時也進行了文件的保存。
4 試驗
試驗實物如圖12 所示。
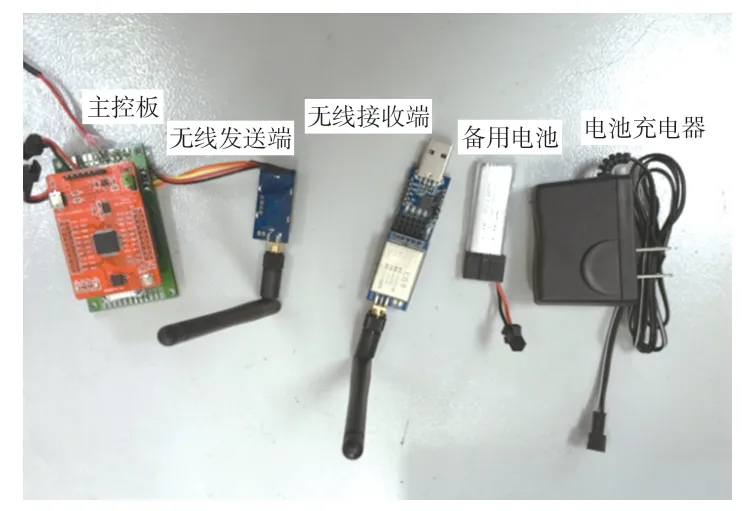
圖12 基于無線的旋轉部件傳熱試驗參數非接觸傳輸系統
4.1 誤碼率試驗
為檢驗數據傳輸的精確性,以串口協議在兩臺計算機之間進行數據包傳輸,測試數據包的丟失率來間接反映誤碼率。試驗連接示意圖如圖13 所示。

圖13 誤碼率試驗連接示意圖
計算機用于測試數據的發送、接收和比較。無線發射器完成串口與無線通信接口轉換的功能并以無線信號的形式發射出去,無線接收機完成對無線信號與串口的轉換并將數據上傳至計算機。
采用2 種試驗來觀測誤碼率:一是通過改變無線設備之間的通信距離來觀測對誤碼率的影響,二是通過一個恒定的無線通信距離,改變數據包的長度來觀測其對誤碼率的影響。試驗中重復傳輸特定序列的數據,試驗結果如表2 和表3 所示。
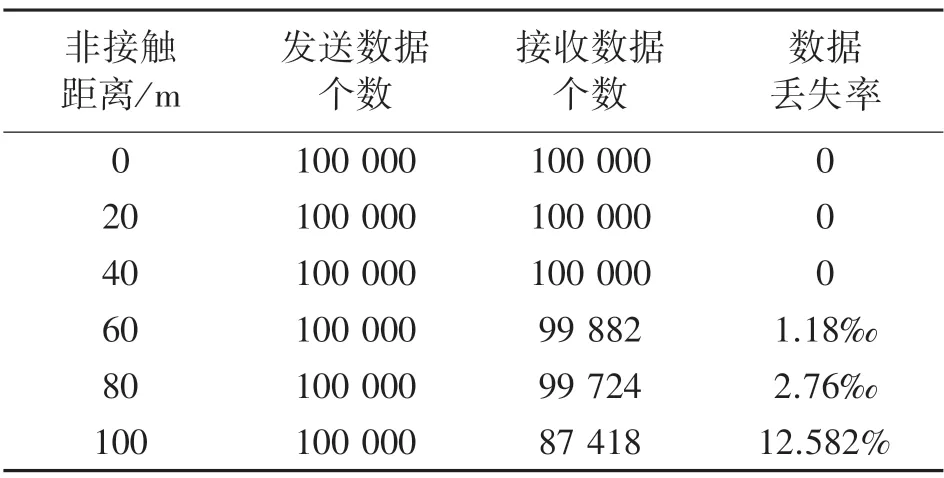
表2 非接觸距離對誤碼率的影響試驗結果
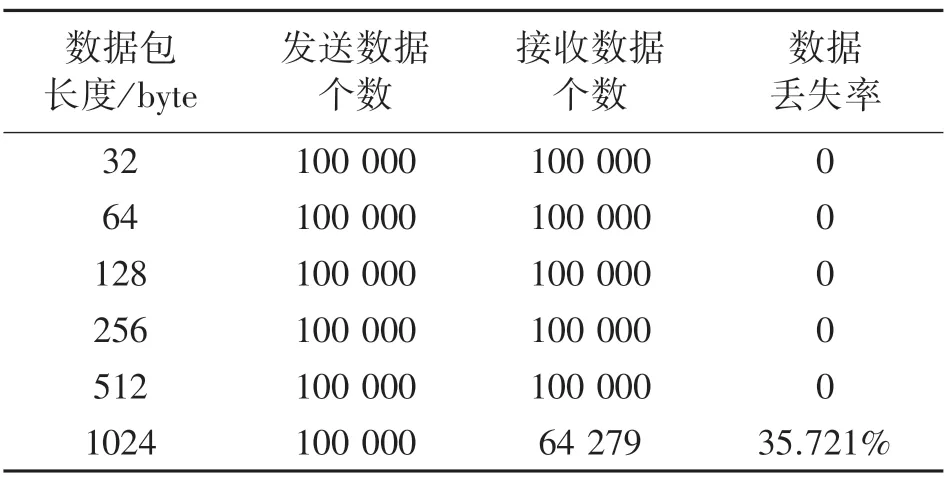
表3 非接觸距離為20 m 條件下數據包長度對誤碼率的影響試驗結果
由表2 可知,當非接觸距離在0~40 m 范圍內時,數據丟失率都可以保持在0。當非接觸距離繼續增大在60 m~80 m 范圍內時,數據丟失率開始逐漸上升,保持在千分之五以內。當非接觸距離到達100 m 時,數據丟失率飆升至12.582%。因此建議將非接觸距離保持在40 m 以內,以保證極低的數據丟失率。
由表3 可知,當非接觸距離在20 m,數據包長度在32 byte~512 byte 范圍內增加時,數據丟失率都可以保持在0。當數據包長度繼續增大到1 024 byte,數據丟失率飆升至35.721%。因此建議將數據包長度保持在512 byte 以內,以保證極低的數據丟失率。
綜上,建議將非接觸距離保持在40 m 以內,數據包長度保持在512 byte 以內,來保證較低的數據丟失率。
4.2 旋轉部件溫度無線遙測試驗
旋轉部件熱管理試驗臺如圖14(a)所示,將無線遙測裝置安裝在電機上,非接觸距離保持在10 m,數據包長度保持在256 byte 開展試驗,得到試驗結果如圖14(b)所示。
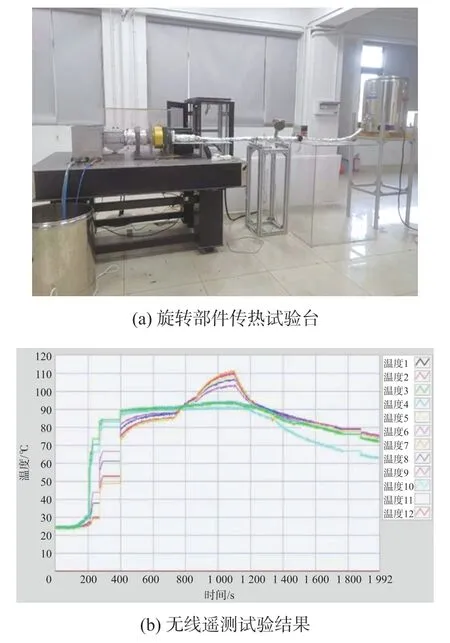
圖14 旋轉部件傳熱試驗臺及無線遙測試驗結果圖
由表4 可以看出,本文設計的基于無線的旋轉部件熱管理試驗參數非接觸傳輸系統能夠在試驗過程中實時準確無誤地將旋轉部件的溫度數據通過無線信號發送至上位機,證明了該系統能夠在實際科研和工程場景中發揮作用,是一種非接觸參數傳輸的可靠方案。

表4 試驗中數據發送與接收結果
5 結論
基于ARM,配合無線傳輸模塊設計了一套無線的旋轉部件傳熱試驗參數非接觸傳輸系統。試驗結果表明:該參數傳輸系統在非接觸距離100 m 以內,數據包長度位512 byte 以內進行數據傳輸具有穩定可靠的工作特性,為航空發動機旋轉部件傳熱試驗的參數測量提供了一種方案。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06