基于GIS的深空探測器真空熱環境模擬測試系統設計
2021-11-01 13:14:34李君
計算機測量與控制 2021年10期
李 君
(1.浙江長征職業技術學院 智能技術學院,杭州 310000; 2.浙江工業大學 計算機科學與技術學院,杭州 310000)
0 引言
隨著全球各大國深空探測活動的深入,探測范圍已擴張到距離地球更遠的土星,在探測器進行探測過程中,所處的環境復雜多變,對人類的熱控系統研究提出了更高的要求[1-3]。深空探測的主引力場已脫離地球,目前我國主要以月球和火星微深空探測對象,展開繞月探測、火星探測及空間探測等研究[4-5]。為了提升探測器對于深空環境適應能力,需要保證在真空狀態內,深空探測器能夠利用輻射完成與深空環境之間的熱交換,這樣極易導致探測器本身熱量累積過高導致其中斷工作[6-7]。
面對日益棘手的問題,很多專家展開了探測器相關的空間模擬研究,韓嘯等人基于參數化設計研究的空間環境模擬器集成設計,在空間環境模擬器模擬的實際需求基礎上,根據容器、熱沉等子系統的特點結合數字化設計平臺,對所有子系統進行相互協同的設計,實現空間模擬的設計目的[8];丘丙林等人根據地面標定設計探測分析器系統,根據空間等離子體環境,利用真空室內部要求需求對其進行實時監控設置,結合粒子束流衰減等系統實現功能齊全的模擬系統[9]。
雖然上述方法都能有效模擬出真空環境,但是對于要求更高的真空熱環境,系統需要進一步升華,對此,本文設計了基于GIS的深空探測器真空熱環境模擬測試系統,滿足對月球進行探測的熱環境測試要求。GIS是一種特定的地理信息系統,能夠針對環境進行相關屬性、空間及缺陷等數據的監測,實現可視化環境分析。由于月球表面最高溫和最低溫之間存在著310 ℃的溫差,系統在真空系統中的熱沉和紅外加熱籠部分進行了更優化的設計,并且通過實驗證明,該系統具備良好運行的能力。
1 基于GIS的深空探測器真空熱環境模擬系統硬件結構
1.1 深空探測器真空熱環境模擬系統組成
深空探測器真空熱環境測試系統主要由基于GIS的環境監測系統、真空容器、真空抽氣系統、外熱流模擬系統及一些輔助系統構成,深空探測器真空熱環境測試系統如圖1所示。

圖1 模擬系統結構示意圖
如圖1所示,深空探測器真空熱環境模擬系統由遠程監控站對深空環境進行監測,并將監測數據傳輸至本地測控層,由外熱流系統及控制系統實現對衛星及輻照環境的模擬,通過真空容器設計GIS環境監測系統、真空抽氣系統及外熱流模擬系統,實現對深空探測器真空熱環境的模擬。以下分別對各系統進行詳細介紹。
1.2 真空抽氣系統
通過高真空抽氣、真空度測量及粗抽3個子系統構建成真空抽氣系統,為了確保旋片泵中的油蒸汽不發生返流現象,在粗抽管路中利用由羅茨泵和大抽速旋片泵組成的機組進行液氮冷阱的設置,其中2臺主抽泵為低溫泵,抽速為30×103L/s;過渡泵為分子泵,同時具備檢漏作用,泵組與各組件之間采用高真空啟動閥門進行相互之間的連接,用以切斷或接通真空抽氣系統的抽氣過程[10]。該系統原理如圖2所示。

圖2 真空抽氣系統原理示意圖
1.3 基于GIS的環境監測系統
GIS系統的主要功能是針對環境監測到的屬性、空間、缺陷等數據空間特征的分析和展示,以及電子地圖平臺的操控。分3個步驟完成GIS系統的設計:
1)利用MapInfo設計工具對空間數據庫進行設計,在VB系統中嵌入GIS控件MapX;
2)確定關系數據庫和屬性數據庫的軟件;
3)傳感器與終端之間利用MSComm進行數據通信[11]。GIS環境監測系統功能結構如圖3所示。

圖3 GIS環境監測系統功能結構示意圖
1.4 外熱流模擬系統
外熱流模擬系統的作用是對衛星和輻照環境進行模擬。該系統的主要構件分別為加熱籠、數據采集組件、電源、控制系統等[12]。預設溫度與熱流計顯示溫度通過數據采集卡進行相互比較,然后針對電源的輸出功率通過單神經自適應PID控制算法展開實時控制,最后將加熱籠中的輻照熱流密度進行調控,滿足溫度閉環控制的需求。
根據測試需求,定制的加熱籠加熱方式為紅外加熱,對于加熱區的溫度控制精度具有較高的要求,同時防輻射屏采用不銹鋼遮擋板,該遮擋板需要進行鏡面拋光處理[13]。
2 基于GIS的深空探測器真空熱環境模擬系統軟件設計
在硬件結構框架的基礎上,設計深空探測器真空熱環境模擬系統的軟件流程。引入單神經自適應PID控制算法,控制紅外加熱籠的溫度變化,將溫控數據傳輸至遠程監控站,聯合真空抽氣系統、基于GIS的環境監測系統及外熱流模擬系統實現探測器真空熱環境模擬系統設計。
2.1 單神經自適應PID控制算法
在深空探測器真空熱環境模擬測試系統中,對真空熱環境的模擬是研究重點。選擇紅外加熱籠作為加熱手段模擬真空熱環境,引入單神經自適應PID控制算法控制紅外加熱籠的溫度變化。
單神經元的功率輸入信號分別設置為X1(k)、X2(k)和X3(k),則功率輸入信號與誤差信號關系為:
X1(k)=e(k)
X2(k)=e(k)-e(k-1)
(1)
X3(k)=e(k)-2e(k-1)+e(k-2)
其中:e(k)表示誤差信號。
利用關聯搜索生成神經元的控制信號,即:
uc(k)=uc(k-1)+Δuc(k)
(2)
(3)
其中:K為系數,用于表示神經元的比例,且大于零,wi(k)和xi(k)為相互之間呈對應關系的加權系數。
在PID控制過程中通過對3個加權系數的調整[14-15],促使紅外加熱籠控制溫度隨著環境的變化而自適應的調整,修正權值的公式為:
wi(k+1)=(1-C)wi(k)+ηe(k)uc(k)xi(k)
(4)
其中:C表示常數,取值區間為[0,1],但在實際應用中通常取值為0,η表示學習步長,且大于零。
根據式(4)可得:
Δwi(k)=wi(k+1)-wi(k)=
(5)
若wi(k)有函數對其進行偏微分的求解,則:
(6)
將公式(6)代入公式(5)中,則:
(7)
其中:函數fi(·)與加權系數wi(k)呈相對應關系,加權系數通過函數負梯度方向展開搜索修正,根據隨機逼近原理[16-18]顯示,當常數C無限小的時候,加權系數則能收斂到一個相對穩定的值,且保證與預期值相差很小,保持在允許誤差范圍之內[19-20]。
采用規范化處理式(1)~(4),依次確保算法具備更好的收斂性和魯棒性,處理公式為:
(8)
(9)
w1(k+1)=w1(k)+ηIe(k)uc(k)x1(k)
w2(k+1)=w2(k)+ηPe(k)uc(k)x2(k)
(10)
w3(k+1)=w3(k)+ηDe(k)uc(k)x3(k)
其中:ηI表示加權系數對應的比例系數學習速率,ηP表示積分系數學習速率,ηD表示微分系數學習速率。根據式(10)調節PID參數,實現溫度隨環境的變化而自適應調整。
2.2 深空探測器真空熱環境模擬流程
根據單神經自適應PID控制算法實現對紅外加熱籠的溫度變化的控制,將控制輸出值與硬件結構相連接,共同實現對深空探測器真空熱環境的模擬,其流程如圖4所示。

圖4 異常數據分析試驗結果對比示意圖
如圖4所示,通過PID算法確定加熱籠的溫度變化并對其進行控制,將數據傳輸至遠程監控站模擬深空探測器真空熱環境,根據GIS技術對深空探測器真空熱環境進行模擬,通過真空抽氣系統實現對真空環境的模擬。據此,實現基于GIS的深空探測器真空熱環境模擬測試系統設計。
3 試驗結果與分析
以模擬的深空探測真空熱環境系統為試驗對象,熱沉加工合格率最重要的指標為漏檢率,利用氦質譜檢漏儀針對系統的熱沉系統的機械泵機組進行檢漏試驗,采用噴吹法檢驗焊縫漏率,氦罩法檢驗總漏率。試驗參數如表1所示。

表1 試驗參數
在表1所示的試驗參數下進行深空探測器真空熱環境模擬測試,流程如圖5所示。

圖5 深空探測器真空熱環境模擬測試流程圖
為確保真空熱環境的可靠性,共設計了6組機械泵機組,通過漏檢率試驗選取最優機組作為真空系統結構部分,試驗結果如圖6所示。

圖6 機械泵機組漏率結果示意圖
由圖6可知,設計的6組機械泵機組,焊縫漏率最低的為4號機組,總漏率最低的為5號機組,從綜合角度考量,5號機組為最優機組,焊縫漏率和總漏率分別為0.78×10-10Pa·m3/s和4.82×10-10Pa·m3/s,漏率值在真空試驗設備的標準之內,故整體系統采用5號泵組為系統組成部分。
采用復合真空機和真空規進行真空抽氣試驗,真空度測量值在105~10-6Pa范圍內,采用載荷條件下展開試驗,試驗結果如圖7所示。
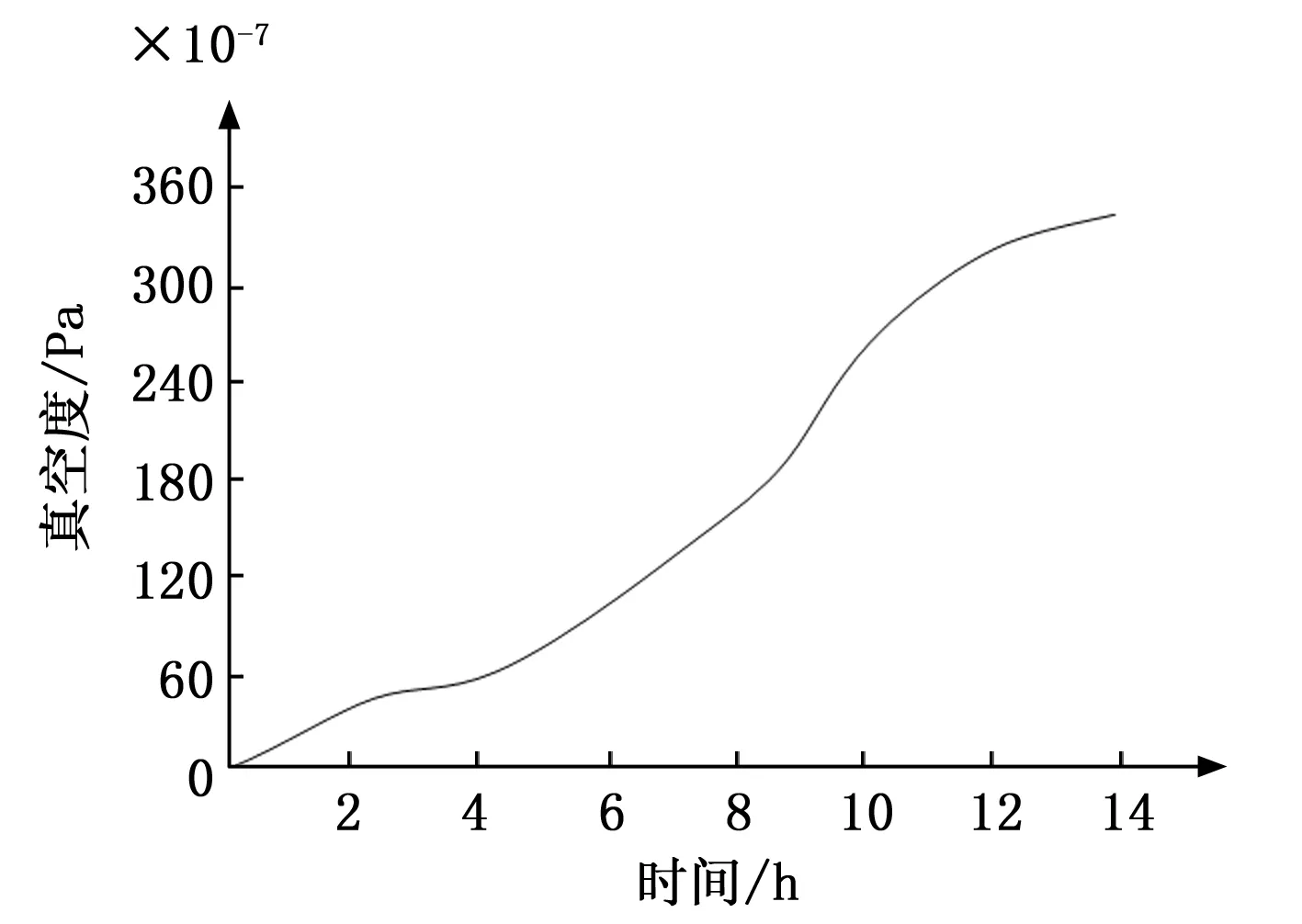
圖7 真空度變化示意圖
液氮輸入真空容器輔助子系統熱沉內部靜置12小時后,熱沉內部真空度值為3.3×10-5Pa,該結果與設計目標值相比高出一個數量級,表明真空抽氣系統具備良好抽氣效果。
在不同溫度工作狀態下進行加熱籠的輻照熱流密度試驗,試驗結果如圖8所示。
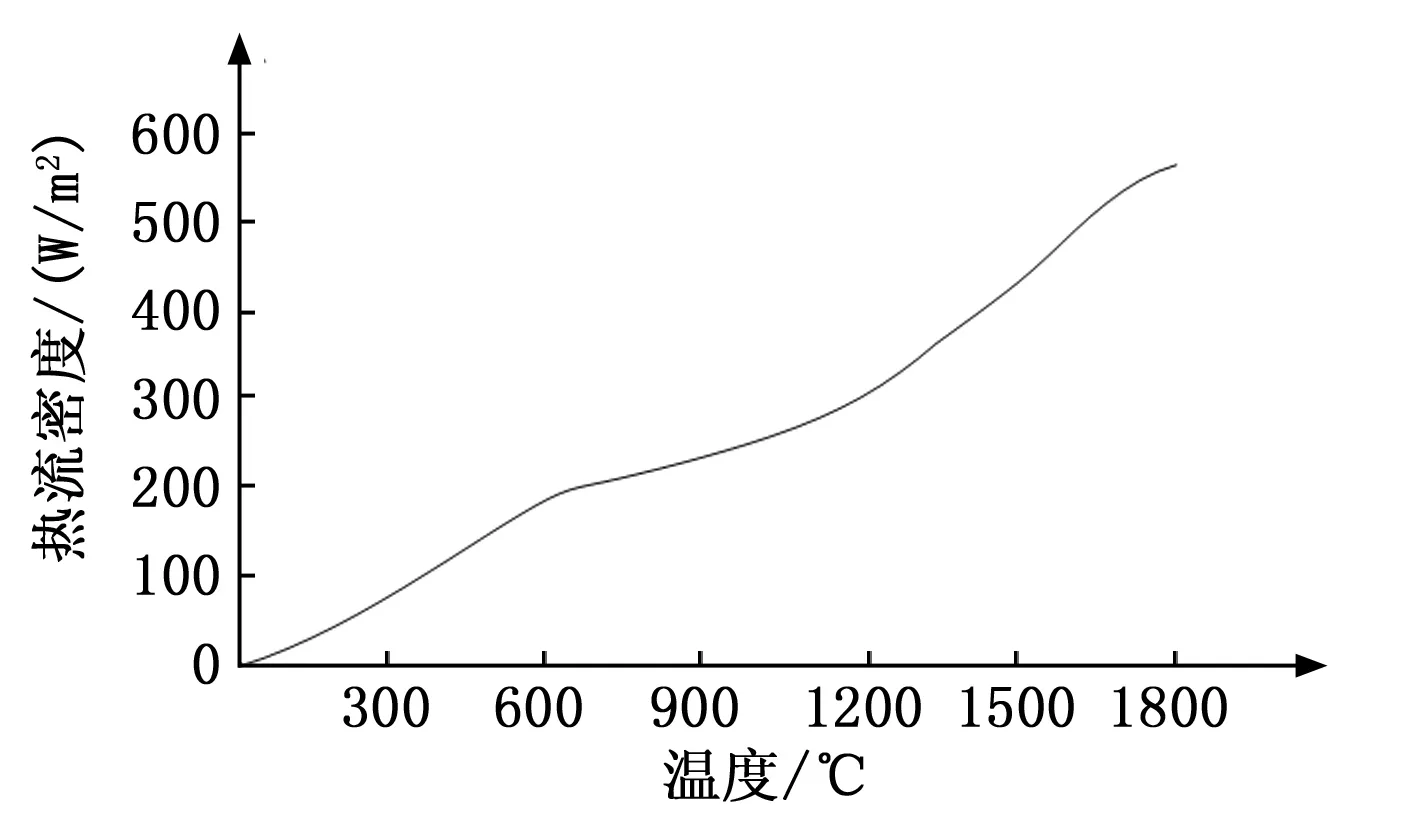
圖8 輻照熱流密度試驗結果示意圖
由圖8可知,當工作狀態處于1 800 ℃的極高溫度時,紅外加熱籠中各加熱區的輻照熱流密度平均為586 W/m2,當低于100 ℃的極低溫度時,加熱區的輻照熱流密度平均僅為27 W/m2,該結果完全滿足設計需求。
各支管內的液氮流量分布直接影響著整體的制冷性能及各子系統溫度的均勻性,而影響液氮流量是否能夠分布均勻的關鍵因素為支管之間的距離和支管自身尺寸,支管距離對液氮流量的影響如圖9所示。
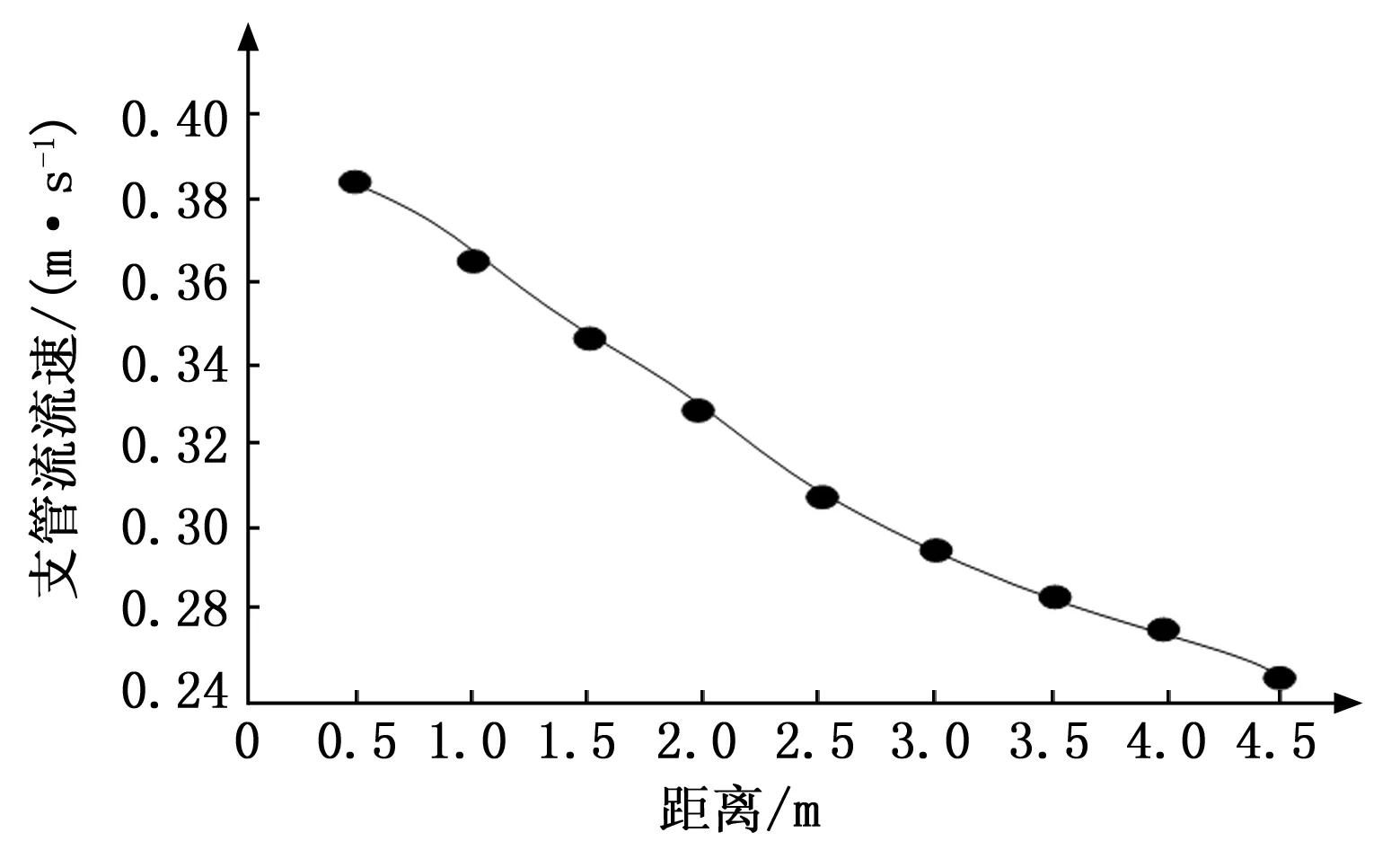
圖9 支管流速分布分析示意圖
圖9中的距離是指各支管與主管之間的間距,從分布結果可以看出,所有支管的流速均保持在0.26~0.40 m/s之內,與主管之間的間距越小則支管流速越大,液氮流量分布不均會導致系統制冷能力下降。為此降低各支管與主管之間的間距,本系統將熱沉管路中各支管之間的距離設為0.15 m,采用靜壓分布和流量分布的方式進行真空系統中的液氮流量流動分布均勻性的試驗,試驗結果如圖10所示。

圖10 支管流速分布結果示意圖
由圖10可知,采用本系統的支管配置后,各支管的流速均保持在0.356~0.374 m/s以內,所有支管液氮流量分布較均勻,表明該設計方式能夠有效提高系統的制冷能力,保證各子系統的溫度均衡,間接提升系統的可靠性和有效性。
采用本文系統和文獻[8]基于參數化設計的空間環境模擬器系統和文獻[9]離子探測分析器地面標定系統進行異常數據的檢測率和誤報率的對比試驗,試驗結果如圖11所示。

圖11 異常數據分析試驗結果對比示意圖
由圖11可知,本文系統的異常數據分析效果相對最好,平均檢測率為98.73%,比文獻[8]系統和文獻[9]系統的平均檢測率分別高1.41%和2.87%;本文系統誤報率為0.18%,比文獻[8]系統和文獻[9]系統的平均誤報率分別低1.41%和2.87%;表明本文基于GIS的深空探測器真空熱環境模擬測試系統在監測過程中,具備較好的異常數據監測能力,能夠有效提升系統的有效性。
由于本文系統應用GIS 對深空探測器真空熱環境進行監測,并優化設計了真空系統中的熱沉和紅外加熱籠部分,并一一優化設計了環境監測系統、真空容器、真空抽氣系統、外熱流模擬系統及一些輔助系統,因此對深空探測器真空熱環境的模擬測試較為準確。
4 結束語
基于GIS構建的深孔探測器真空熱環境模擬測試系統,可解決大熱流對真空容器系統中的熱沉子系統產生的溫度和流量分布不均等問題,設計中對其采取了結構優化策略,采用提升紅外加熱籠的溫度控制能力的方法,并結合地理信息系統GIS,實現對模擬深空熱環境的實時檢測和分析,該真空熱環境模擬測試系統的各項指標均滿足設計要求。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中國生殖健康(2020年6期)2020-02-01 06:28:50
中國生殖健康(2019年11期)2019-01-07 01:28:02
藝術啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
