基于模糊控制的智能感控視力保護(hù)儀
2021-11-01 13:16:46付深圳張麗娜魯旭濤高英姿
計(jì)算機(jī)測(cè)量與控制 2021年10期
張 柱,付深圳,張麗娜,魯旭濤,王 英,高英姿
(1.浪潮電子信息產(chǎn)業(yè)股份有限公司,濟(jì)南 250014;2.中北大學(xué) 信息與通信工程學(xué)院,太原 030051;3.中北大學(xué) 能源動(dòng)力工程學(xué)院,太原 030051)
0 引言
我國(guó)作為一個(gè)近視大國(guó),總近視人口在世界上位居第一,根據(jù)最新的衛(wèi)計(jì)委數(shù)據(jù)顯示,我國(guó)當(dāng)前的近視人口達(dá)到7億以上,兒童的近視率約14%,小學(xué)生的近視率約48%,初中生的近視率約73.6%,高中生的近視率高達(dá)85%。尤為重要的是,有超過(guò)50%的家長(zhǎng)并不重視孩子視力問(wèn)題,對(duì)于視力下降以及視力矯正等問(wèn)題并未作出任何的補(bǔ)救措施,做一些專(zhuān)業(yè)的醫(yī)療救治的學(xué)生更是少之又少。因此,戴近視眼鏡的學(xué)生屢見(jiàn)不鮮。確保健康的閱讀時(shí)間、培養(yǎng)良好的學(xué)習(xí)習(xí)慣以及創(chuàng)造良好的學(xué)習(xí)環(huán)境顯得尤為重要。通過(guò)視力保護(hù)儀來(lái)避免長(zhǎng)時(shí)間的讀寫(xiě),降低近視眼的發(fā)生率,減少青少年的身體損傷是當(dāng)前發(fā)展的必然趨勢(shì)。
對(duì)于此類(lèi)問(wèn)題的研究,主要集中于視力保護(hù)儀器設(shè)計(jì)和視力檢測(cè)的精度兩方面。對(duì)于視力保護(hù)設(shè)計(jì)方面,張文玥等人利用PWM脈寬調(diào)制技術(shù)對(duì)LED臺(tái)燈進(jìn)行光照度的自動(dòng)調(diào)節(jié),能在人體與臺(tái)燈距離小于25 cm時(shí)進(jìn)行聲光報(bào)警[1];胡景勤等人通過(guò)實(shí)時(shí)顯示距離和光強(qiáng)等參數(shù)來(lái)提示學(xué)生,達(dá)到調(diào)整坐姿的目的[2]。對(duì)于視力檢測(cè)的精度方面,主要通過(guò)智能算法來(lái)實(shí)現(xiàn)視力保護(hù)。王娟等人利用深度學(xué)習(xí)中Faster-RCNN來(lái)實(shí)現(xiàn)瞳孔檢測(cè),利用特定的體征參數(shù)來(lái)計(jì)算出近視的程度,進(jìn)而采取救治措施[3];陳超等人根據(jù)用戶(hù)的喜好等參數(shù),定制視覺(jué)設(shè)備并通過(guò)云端數(shù)據(jù)處理來(lái)增強(qiáng)視覺(jué)效果,進(jìn)而保護(hù)視力[4];文獻(xiàn)[5]采用AdaBoost算法和級(jí)聯(lián)方法用實(shí)測(cè)的數(shù)據(jù)計(jì)算出人的學(xué)習(xí)狀態(tài)[5]。綜合分析上述兩方面的研究,考慮的場(chǎng)景都比較單一,將視力監(jiān)測(cè)的精度加入智能視力保護(hù)儀中,提高保護(hù)效率。
本文針對(duì)視力保護(hù)系統(tǒng)的飛線(xiàn)性和時(shí)變性,設(shè)計(jì)了基于模糊控制的智能感控視力保護(hù)儀,通過(guò)豐富模糊控制規(guī)則來(lái)解決參數(shù)難調(diào)節(jié)的問(wèn)題,進(jìn)一步完善視力保護(hù)系統(tǒng)的控制性能。
1 系統(tǒng)結(jié)構(gòu)及原理
本系統(tǒng)的視力保護(hù)儀可以通過(guò)光照強(qiáng)度和距離等參數(shù)來(lái)實(shí)現(xiàn)實(shí)時(shí)的顯示、定時(shí)和無(wú)線(xiàn)通信。各個(gè)功能模塊之間互相協(xié)調(diào),系統(tǒng)的控制策略通過(guò)軟件設(shè)計(jì)實(shí)現(xiàn),系統(tǒng)的監(jiān)測(cè)和報(bào)警通過(guò)硬件設(shè)計(jì)來(lái)完成。通過(guò)傳感器技術(shù)、數(shù)字信號(hào)處理技術(shù)以及模糊控制智能算法等技術(shù)的融合來(lái)搭建智能感控視力保護(hù)平臺(tái)。智能感控視力保護(hù)儀的系統(tǒng)如圖1和圖2所示。

圖1 控制主機(jī)框圖

圖2 遙控器框圖
該視力保護(hù)儀能實(shí)現(xiàn)的具體的各部分功能:
1)微控制器部分:采用STM32單片機(jī),實(shí)現(xiàn)數(shù)據(jù)的采集、數(shù)據(jù)處理以及控制信號(hào)的輸出。
2)定位部分:采用步進(jìn)電機(jī)和熱釋紅外傳感器,監(jiān)測(cè)使用者的使用狀態(tài)。通過(guò)步進(jìn)電機(jī)的轉(zhuǎn)動(dòng)驅(qū)動(dòng)紅外傳感器來(lái)尋找使用者,當(dāng)檢測(cè)到有人靠近時(shí),傳感器將采集到的數(shù)據(jù)傳輸給單片機(jī),步進(jìn)電機(jī)停止轉(zhuǎn)動(dòng)。
3)步進(jìn)電機(jī)驅(qū)動(dòng)部分:本系統(tǒng)采用的型號(hào)為ULN2003來(lái)驅(qū)動(dòng)電機(jī),通過(guò)識(shí)別電源脈沖信號(hào)來(lái)旋轉(zhuǎn)一定的角度,進(jìn)而帶動(dòng)傳感器的感應(yīng)。
4)超聲波測(cè)距部分:超聲波測(cè)距是利用時(shí)間渡越法,根據(jù)超聲波的反射特性,測(cè)出超聲波的傳輸距離后再計(jì)算出障礙物與發(fā)射源的距離。在測(cè)量前要先減少溫度對(duì)速度的影響,降低誤差。
5)無(wú)線(xiàn)通信部分:通過(guò)無(wú)線(xiàn)收發(fā)模塊來(lái)實(shí)現(xiàn)遙控和主板之間的無(wú)線(xiàn)數(shù)據(jù)傳輸。
6)模數(shù)轉(zhuǎn)換部分:數(shù)模轉(zhuǎn)換主要用來(lái)處理光強(qiáng)傳感器采集的模擬數(shù)據(jù)量,通過(guò)數(shù)模轉(zhuǎn)換來(lái)得到單片機(jī)能夠識(shí)別的信息量。
2 系統(tǒng)硬件設(shè)計(jì)
2.1 主控模塊的設(shè)計(jì)
微控制器是視力保護(hù)系統(tǒng)最主要的組成部分,要進(jìn)行數(shù)據(jù)的傳輸和處理,需要將采集到的光強(qiáng)、距離以及溫濕度等數(shù)據(jù)進(jìn)行分析并處理,從而控制儀器的使用狀態(tài)。
單片機(jī)包括三大總線(xiàn):數(shù)據(jù)總線(xiàn)、地址總線(xiàn)、控制總線(xiàn)。四大單元:CPU 、數(shù)據(jù)存儲(chǔ)器、程序存儲(chǔ)器、定時(shí)/計(jì)數(shù)器。單片機(jī)的核心是CPU,控制著整個(gè)單片機(jī)主要有運(yùn)算器、控制器,這兩個(gè)重要元素決定著CPU的主要性能,二者能夠?qū)崿F(xiàn)運(yùn)算、控制等功能,可以進(jìn)行一系列運(yùn)算的數(shù)據(jù)運(yùn)算,如邏輯運(yùn)算、算術(shù)運(yùn)算、數(shù)據(jù)傳送及位操作等,都是靠運(yùn)算器來(lái)實(shí)現(xiàn)。控制器主要是對(duì)單片機(jī)工作起到一定的輔助作用,產(chǎn)生時(shí)序脈沖,為單片機(jī)提供限制電路信號(hào)等。
當(dāng)前的微控制器也可使用最傳統(tǒng)的8位單片機(jī),但是其處理數(shù)據(jù)的速度和處理的數(shù)據(jù)量都有局限。因此采用實(shí)效性強(qiáng)、功耗低、易于開(kāi)發(fā)的STM32處理器。
2.2 超聲波測(cè)距設(shè)計(jì)
超聲波測(cè)距通常采用渡越時(shí)間法,通過(guò)測(cè)量發(fā)射出去的超聲波和反射回的超聲波的時(shí)間來(lái)計(jì)算保護(hù)儀與障礙物之間的距離。超聲波傳感器主要由雙壓電晶片振子、圓錐共振板以及電極等組成。在電極兩端施以電壓,晶片就會(huì)發(fā)生形變,如果加上一定頻率的電壓,形變也會(huì)保持頻率,即發(fā)射出超聲波。時(shí)間渡越法的原理如圖3所示。

圖3 超聲波測(cè)距原理
設(shè)超聲波在空氣中的傳播速度為v,超聲波發(fā)射電路和超聲波接收電路中心距離的一半為L(zhǎng),需要測(cè)的保護(hù)儀與障礙物之間的距離為S,則:

其中:t為超聲波發(fā)出的時(shí)間與返回的時(shí)間差,微控制器記錄的時(shí)間,v為聲波在介質(zhì)中的傳播速率。

超聲波在空氣的傳播速度受溫度的影響較大,在標(biāo)準(zhǔn)狀態(tài)時(shí)候,傳播速度v0一般為331.5 m/s。在正常室溫t下,超聲波的傳播速度為:
其中:r為相對(duì)濕度,Ps為某時(shí)刻的空氣飽和蒸氣壓,P為標(biāo)準(zhǔn)大氣壓強(qiáng)。
超聲波測(cè)距模塊的標(biāo)準(zhǔn)工作電壓為5 V,工作電流為15 mA,工作頻率為40 Hz,最遠(yuǎn)的射程可達(dá)到4 m。該模塊的具體電路如圖4所示。
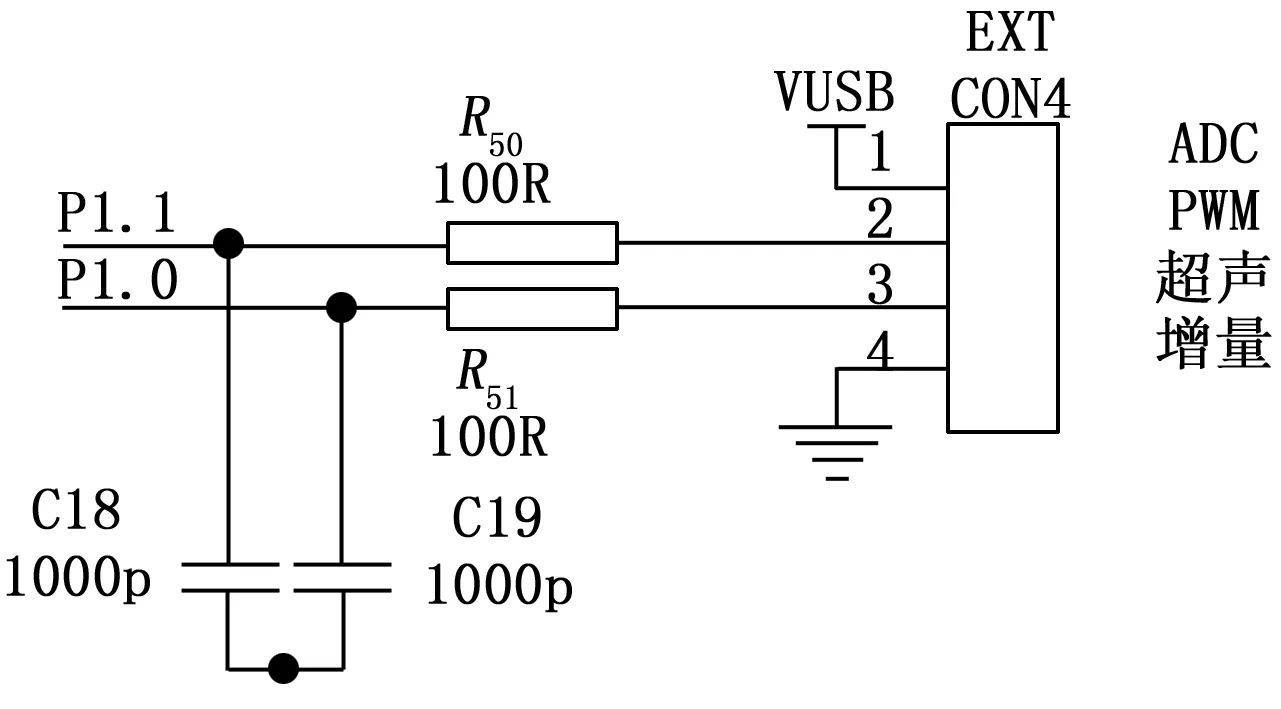
圖4 超聲波測(cè)距模塊電路圖
2.3 光照強(qiáng)度檢測(cè)電路設(shè)計(jì)
光敏電阻、定值電阻、數(shù)模轉(zhuǎn)換器件以及電源構(gòu)成光照強(qiáng)度檢測(cè)電路。
通過(guò)光敏電阻的阻值大小反應(yīng)光照的強(qiáng)度。根據(jù)串聯(lián)分壓的原理,當(dāng)光強(qiáng)增大的時(shí)候,電阻里的電子被激發(fā),光敏電阻的阻值減小;相反,當(dāng)光強(qiáng)較小時(shí),阻值增大。檢測(cè)到的電阻值會(huì)通過(guò)固定引腳發(fā)送到芯片,再有數(shù)模轉(zhuǎn)換器輸出一個(gè)可識(shí)別的二進(jìn)制數(shù),即為當(dāng)前的電壓大小,進(jìn)而推理光照的強(qiáng)弱。本設(shè)計(jì)使用的光照傳感器的光照強(qiáng)度計(jì)算公式:
N=0.467 5*(221-R)
其中:N為當(dāng)前光照強(qiáng)度,R為光敏電阻的阻值。在測(cè)得電阻值后,由CH0引腳把電阻值輸給芯片,經(jīng)由AD轉(zhuǎn)換器輸出一個(gè)8位二進(jìn)制數(shù),得到當(dāng)前電壓值。電路如圖5所示。

圖5 光照強(qiáng)度檢測(cè)模塊電路圖
2.4 無(wú)線(xiàn)通信模塊設(shè)計(jì)
本設(shè)計(jì)選用抗干擾能力強(qiáng)、功耗低、傳輸數(shù)據(jù)穩(wěn)定的nRF24L01無(wú)線(xiàn)收發(fā)芯片來(lái)完成遙控器和主控制器之間的數(shù)據(jù)通信,收發(fā)頻率為2.4~2.5 GHz,能夠進(jìn)行自動(dòng)地應(yīng)答和重發(fā)等。遙控器可以對(duì)主控制器件設(shè)置時(shí)間,控制通斷,相反,主控制器也可以把溫濕度、距離以及光照強(qiáng)度等信息傳送給遙控器從而達(dá)到實(shí)時(shí)的數(shù)據(jù)傳輸與控制。具體電路如圖6所示。
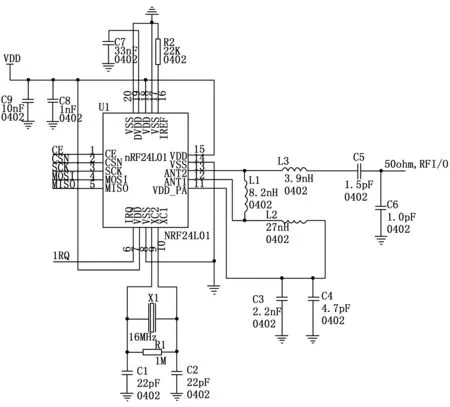
圖6 無(wú)線(xiàn)收發(fā)模塊電路圖
3 系統(tǒng)軟件設(shè)計(jì)
軟件設(shè)計(jì)也是智能感控視力保護(hù)儀的重要部分,硬件的設(shè)計(jì)需要軟件的技術(shù)支持,合理的編程設(shè)計(jì)能夠更準(zhǔn)確的完成系統(tǒng)的功能。通過(guò)模塊化編程,將各個(gè)模塊獨(dú)立編寫(xiě),然后用工程整合后可以更方便地調(diào)試程序,方便后續(xù)軟件的修復(fù)和升級(jí)。主程序流程如圖7所示。

圖7 主流程圖
1)開(kāi)始給系統(tǒng)上電,判斷系統(tǒng)的復(fù)位鍵是否按下,復(fù)位鍵按下,系統(tǒng)進(jìn)行初始化。
2)系統(tǒng)初始化后,判斷學(xué)習(xí)鍵是否按下,按下學(xué)習(xí)鍵后,可以啟動(dòng)系統(tǒng)的各個(gè)功能模塊,正常運(yùn)行系統(tǒng)。
3)調(diào)用系統(tǒng)的功能模塊后,對(duì)采集的數(shù)據(jù)進(jìn)行分析和處理,進(jìn)而完成設(shè)計(jì)功能。
4 系統(tǒng)智能算法設(shè)計(jì)
4.1 模糊控制系統(tǒng)模型
模糊控制器能夠通過(guò)操作者的經(jīng)驗(yàn)來(lái)控制對(duì)象,不完全依靠被控對(duì)象的特點(diǎn),采用IF-THRN的控制規(guī)則,參數(shù)的不便于調(diào)整,能夠保證數(shù)據(jù)的完整性。自適應(yīng)模糊控制是集自適應(yīng)學(xué)習(xí)算法的模糊控制器,利用操作者給的模糊信息來(lái)進(jìn)行控制處理,對(duì)參數(shù)變化較大,不確定的系統(tǒng)有著重要的作用。模糊控制集合理論和模糊邏輯推理是模糊控制的基礎(chǔ),模糊控制規(guī)則是核心,可以通過(guò)隸屬度函數(shù)來(lái)表現(xiàn)。隸屬度函數(shù)是人為定義的函數(shù),具有連續(xù)可調(diào)的特點(diǎn)。具體形式分以下幾種,圖像分別如圖8(a),(b),(c)所示。
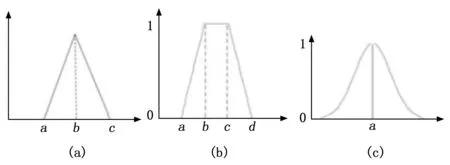
圖8 隸屬度函數(shù)圖像
1)三角形:
2)梯形:
3)高斯形:
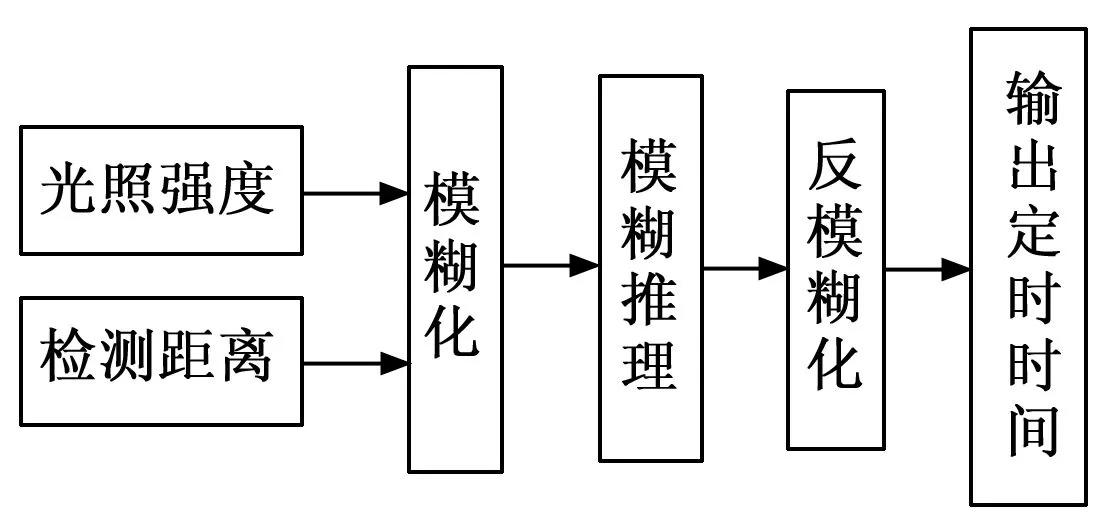
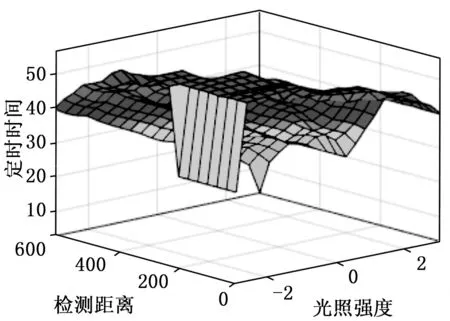
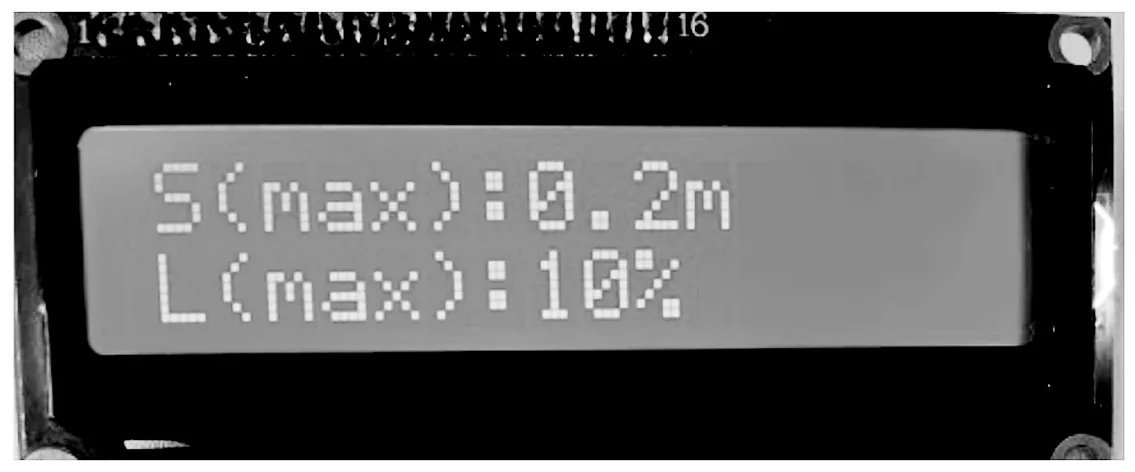
A(x)=e-[(x-a)/σ]2,-∞ 將采集到的光照強(qiáng)度和距離等參數(shù)進(jìn)行模糊控制處理,通過(guò)模糊化分析、模糊控制規(guī)則建立以及反模糊控制來(lái)輸出定時(shí)時(shí)間參數(shù)。解模糊的幾種常見(jiàn)方式如下: 重心法: 最大隸屬度法:輸出最大的隸屬度的值。 系數(shù)加權(quán)平均法: 模糊控制仿真的具體操作是先將采集到的光照強(qiáng)度和距離作為輸入的模糊量,設(shè)計(jì)合理的模糊規(guī)則后輸出定時(shí)時(shí)間參數(shù)。具體的實(shí)現(xiàn)流程如圖9所示。 圖9 模糊控制流程圖 1)輸入輸出變量論域。本文的控制器的輸入是光照強(qiáng)度L和檢測(cè)距離S兩個(gè)變量。輸出量是定時(shí)時(shí)間T。L的變化范圍為-3~3 lx;S的變化范圍為0~600 cm;T的時(shí)間變化范圍為0~60 min。 2)模糊語(yǔ)言及其量化論域。模糊控制的規(guī)則根據(jù)不同的輸入輸出的級(jí)別來(lái)確定,首先將輸入輸出3個(gè)變量進(jìn)行等級(jí)定義,然后根據(jù)實(shí)際情況排列組合得到模糊控制規(guī)則。本文L的變化分為7個(gè)等級(jí),從0~6;S的變化分為7個(gè)等級(jí),從0~6;T的變化分為8個(gè)等級(jí),從0~7。對(duì)應(yīng)的語(yǔ)言如表1所示。 表1 L、S、T的模糊語(yǔ)言變量 3)隸屬度函數(shù)。采用三角隸屬函數(shù)將輸入與模糊控制規(guī)則聯(lián)系起來(lái),隸屬函數(shù)的形式會(huì)影響定時(shí)時(shí)間。輸入輸出變量的隸屬度函數(shù)結(jié)果如圖10~12所示。 圖10 L的隸屬度函數(shù) 圖11 S的隸屬度函數(shù) 4)規(guī)則表。模糊控制主要是通過(guò)設(shè)定好的控制規(guī)則來(lái)實(shí)現(xiàn)的,模糊控制規(guī)則作為模糊控制器的核心,在設(shè)計(jì)模糊控制規(guī)則的時(shí)候,不僅要根據(jù)理論知識(shí)推理還要借鑒一些實(shí)際經(jīng)驗(yàn)。本文的輸入為7個(gè)等級(jí),因此共有49個(gè)控制的規(guī)則組合,具體的模糊控制規(guī)則表2所示。 表2 模糊控制規(guī)則表 在Matlab的工具箱中設(shè)置模糊控制器,設(shè)置為雙輸入單輸出的控制器,并將輸入輸出變量的命名進(jìn)行更改,設(shè)計(jì)的控制器結(jié)構(gòu)如圖13所示。 圖13 模糊控制器結(jié)構(gòu) 對(duì)模糊控制器的輸入和輸出函數(shù)的隸屬度進(jìn)行編輯后,建立模糊控制規(guī)則,對(duì)本設(shè)計(jì)的49條控制規(guī)則逐一設(shè)置。模糊控制規(guī)則設(shè)計(jì)窗口如圖14所示。 圖14 模糊控制規(guī)則 在建立了模糊控制規(guī)則后,模糊控制系統(tǒng)建立完成,在模糊控制規(guī)則器中查看模糊規(guī)則推理,監(jiān)測(cè)模糊控制系統(tǒng)。具體的模糊控制規(guī)則觀(guān)測(cè)器如圖15所示。 圖15 模糊控制規(guī)則觀(guān)測(cè)器 模糊控制器建立完成后,設(shè)置x軸為光照強(qiáng)度,y軸為檢測(cè)距離,z軸為計(jì)算的定時(shí)時(shí)間。實(shí)際的輸出結(jié)果如圖16所示。 圖16 模糊控制結(jié)構(gòu)曲面圖 智能感控視力保護(hù)的智能算法經(jīng)過(guò)模糊控制仿真實(shí)驗(yàn)表明,在檢測(cè)到任意一組光照強(qiáng)度和檢測(cè)距離時(shí)候,都可以通過(guò)嚴(yán)謹(jǐn)?shù)哪:刂埔?guī)則得到定時(shí)時(shí)間。如光照強(qiáng)度為2.15 lx,檢測(cè)距離為270 cm時(shí),定時(shí)時(shí)間為57.1 min。 為了驗(yàn)證上述模糊控制仿真實(shí)驗(yàn)的隸屬度函數(shù)和模糊控制規(guī)則建立的完整性以及可靠性,本文采用自適應(yīng)模糊PID控制進(jìn)行對(duì)比仿真實(shí)驗(yàn)。該控制方式是一種線(xiàn)性控制,根據(jù)定值d(t)與實(shí)際的輸出值f(t)構(gòu)成誤差值d(t)-f(t)。本設(shè)計(jì)是在連續(xù)狀態(tài)下得出控制的時(shí)間。具體模型為: PID控制過(guò)程是將誤差和誤差變化率作為輸出,通過(guò)模糊控制規(guī)則將模糊參數(shù)進(jìn)行調(diào)整。經(jīng)過(guò)PID控制調(diào)整后的輸入輸出參數(shù)得出的模糊控制查看器如圖17所示。 圖17 調(diào)整后的模糊控制曲面圖 通過(guò)上述的對(duì)比實(shí)驗(yàn)發(fā)現(xiàn),在同一組輸入?yún)?shù)光照強(qiáng)度為2.15 lx,檢測(cè)距離為270 cm時(shí),PID控制得到的定時(shí)時(shí)間為46.5 min。然而本系統(tǒng)采用的模糊控制規(guī)則使得定時(shí)時(shí)間增加了10.6 min,相對(duì)時(shí)間增大了18.563%,可以有效地為學(xué)生提供學(xué)習(xí)時(shí)間,保證良好的光照。經(jīng)過(guò)調(diào)整的定時(shí)時(shí)間更為集中,不符合實(shí)際情況。原模糊控制規(guī)則得出的定時(shí)時(shí)間更為精確,控制更加精準(zhǔn)。 在對(duì)系統(tǒng)進(jìn)行上電調(diào)試前,首先對(duì)系統(tǒng)的硬件部分進(jìn)行仿真檢測(cè),系統(tǒng)的硬件仿真也是一種建模形式,通過(guò)對(duì)實(shí)際的電路進(jìn)行虛擬處理,用虛擬的電路對(duì)硬件設(shè)計(jì)進(jìn)行電路分析與處理。本設(shè)計(jì)的系統(tǒng)測(cè)試將對(duì)每個(gè)功能模塊都進(jìn)行電路仿真實(shí)驗(yàn),各個(gè)功能模塊要分開(kāi)測(cè)試。通過(guò)仿真實(shí)驗(yàn)的測(cè)試,可以判斷電路是否正常連通,功能模塊是否完整,以便進(jìn)行后續(xù)的修復(fù)和完善。采用Proteus軟件進(jìn)行仿真設(shè)計(jì),其主要有以下優(yōu)點(diǎn):可以智能設(shè)計(jì)電路原理圖,自動(dòng)連線(xiàn),可以減少繪圖時(shí)間;具有完備的仿真功能,仿真器件庫(kù)龐大,虛擬儀器豐富;特有的單片機(jī)協(xié)同仿真功能,可以進(jìn)行實(shí)時(shí)仿真;PCB設(shè)計(jì)平臺(tái)合理,可以支持多種格式輸出。硬件測(cè)試無(wú)誤后,對(duì)系統(tǒng)進(jìn)行上電調(diào)試。首先設(shè)置光照強(qiáng)度和檢測(cè)距離的閾值,將檢測(cè)距離的閾值設(shè)置為0.2 m,光照強(qiáng)度的變化閾值設(shè)置為10%,設(shè)置結(jié)果如圖18所示。 圖18 閾值顯示圖 點(diǎn)擊確認(rèn)按鍵后,系統(tǒng)會(huì)根據(jù)當(dāng)前的光照強(qiáng)度以及檢測(cè)距離計(jì)算出定時(shí)時(shí)間,當(dāng)檢測(cè)具體顯示結(jié)果如圖19所示。 圖19 測(cè)試結(jié)果 經(jīng)測(cè)試,本設(shè)計(jì)的功能都可以完整的實(shí)現(xiàn),各個(gè)功能模塊都能正常工作。 本系統(tǒng)所設(shè)計(jì)的智能感控視力保護(hù)儀能夠完成定位、數(shù)據(jù)的采集、智能控制、數(shù)據(jù)的無(wú)線(xiàn)通信和數(shù)據(jù)的處理及顯示,還另外增加了模糊控制定時(shí)功能。最終實(shí)驗(yàn)測(cè)試表明,相對(duì)于PID控制而言,相對(duì)時(shí)間可增加18%左右,此設(shè)備能夠精確地計(jì)算出定時(shí)時(shí)間,并對(duì)異常數(shù)據(jù)迅速做出反應(yīng),具有實(shí)際的應(yīng)用價(jià)值,能廣泛應(yīng)用于生活中。
4.2 模糊控制器設(shè)計(jì)




4.3 仿真實(shí)驗(yàn)




4.4 對(duì)比實(shí)驗(yàn)
5 系統(tǒng)測(cè)試

6 結(jié)束語(yǔ)
猜你喜歡
小獼猴智力畫(huà)刊(2022年3期)2022-03-29 01:09:42
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
數(shù)學(xué)小靈通(1-2年級(jí))(2021年4期)2021-06-09 06:26:14
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
Coco薇(2017年11期)2018-01-03 20:59:57
暨南學(xué)報(bào)(哲學(xué)社會(huì)科學(xué)版)(2016年9期)2017-01-15 13:52:02
