艦基旋翼無人機的試驗實況航拍應用研究
2021-11-02 11:54:58蘇里陽陳實璇
海洋技術學報 2021年4期
關鍵詞:作業
田 政,蘇里陽,陳實璇
(1.國家海洋技術中心,天津 300112;2. 中國人民解放軍91550部隊43分隊,遼寧 大連 116023;3. 中國人民解放軍32023部隊,遼寧 大連 116023)
無人機(Unmanned Aerial Vehicle,UAV),具有使用成本低、機動靈活和超視距控制等特點,通過搭載不同類型載荷,可服務于實時監測、無線覆蓋、搜索救援、商業表演、物流運輸和精準農業等多個民用領域,亦可執行雷達欺騙、導彈誘餌、反潛作戰、電子情報和偵查打擊等軍事任務[1-3]。隨著無人機應用技術不斷發展和低空空域逐步開放,無人機有望在不同的應用領域迎來新的機遇,在諸多行業中能夠突破傳統工作方式,有效降低風險、節約成本,在軍用、民用等領域應用前景十分廣闊。
航空拍攝又稱航拍,是指攝像機位空中對地形地貌、城市景觀和工程建設等地理形態進行攝影攝像以獲取空照圖的活動,具有高清晰、大比例尺和高現勢性等優點,特別適合地理測繪、動態目標跟蹤和快速動感效果影像獲取,已在地理調查、農業作業、公共安全、國防事業和數字地球等領域得到應用[4-5]。
目前,航拍主要有兩種方式:無人機航拍和載人機航拍。無人機航拍是指采用無人機作為空中平臺,以機載攝影攝像設備為圖像采集器,集成高空拍攝、遙測遙控、視頻圖像傳輸與圖像處理的應用技術。無人機航拍轉場高效便捷、操作靈活機動、人力經濟成本低,在設計和最優化組合方面具有突出的特點,對拍攝主體影響較小,利于執行隱蔽、危險任務。載人機航拍是指攝影師攜帶影像記錄設備位直升機、飛艇等載人飛行平臺進行空中攝影攝像的特種作業形式。載人飛行平臺作業半徑大、留空時間長、飛行時速快、環境適應性強,可搭載大型專業攝錄設備,攝影師能夠根據預先設計或現場實際采用個性化拍攝手法,在拍攝高度、跨度、效率和成像質量上具有優勢[6],但是存在飛行成本高,人力需空中作業,危險系數高等問題。
指揮決策提供重要判斷依據。艦基試驗實況航拍無人機可大視角、近距離觀測海上運動平臺試驗實況,實時記錄、回傳關鍵目標環節實況信息,提供岸上指揮控制中心全方位試驗現場實況信息,服務于試驗組織指揮、結果評估和故障分析等全過程,是實現海上運動平臺試驗全過程可視化管理的重要手段。然而,當前利用無人機航拍對試驗過程進行監控雖然有了一定的應用,但是并沒有艦基結合應用的實例。鑒于目前航拍無人機上艦缺乏相關現實案例參考,本文對航拍無人機上艦問題進行了探索性研究,從起降方式、飛控等級和環境適應性等選型要素分析了適用艦基試驗實況航拍無人機的應用特點,針對影響艦基旋翼航拍無人機現實應用的關鍵要素進行了重點研究,利用模糊綜合評判方法建立艦基旋翼無人機飛行安全評估模型,克服了量化評估作業安全的難點,能夠較好地評估艦基旋翼無人機海上作業的安全性,驗證了航拍無人機上艦的可行性。
1 艦基試驗實況航拍無人機應用特點
1.1 選型分析
無人機位空中拍攝海上運動艦船試驗實況與陸基航拍不同,艦載航拍無人機工況環境復雜,并應具備較強的空中懸停拍攝能力,航拍作業風險等級高,對無人機平臺的選型設計更具針對性,主要表現在以下幾方面。
(1)起降方式
無人機續航時間有限,為保證視距內/外飛行安全,無人機應能夠在目標試驗船上靈活起降。水面艦船通常可提供無人機起降的場地空間較小,不利于配備復雜、大體積的發射回收系統,垂直起降是適用于航拍無人機上艦工作的理想起降方式。
(2)飛控等級
艦船本身是巨大的磁性物體,船體自身與其載有的各類型雷達與電臺工作中會干擾無人機的通信系統。無人機通訊鏈路應該采用冗余設計,電磁兼容性要求高,飛控系統可靠性必須得到保證,至少達到工業級標準以上,且具備較強的智能飛行能力。
(3)環境適應性
海上環境復雜,無人機遭遇大風和擾流情況增多,空氣中水汽含量豐富,空氣相對濕度、鹽度較大,在相對濕度達到80%時,常會有海霧出現,易對作業設備產生腐蝕作用。嚴酷的海上作業條件要求無人機具有較強的抗風性能和一定的防潮、防鹽霧能力[7]。
綜合考慮以上選型要素,兼顧航拍飛行器的經濟性、安全性和易操作性,本文采用工業級電動多旋翼無人機用于航拍海上運動艦船試驗實況。
1.2 系統組成
系統主要由旋翼無人機平臺分系統、任務載荷分系統和控制傳輸分系統等3部分組成。系統組成如圖1所示。
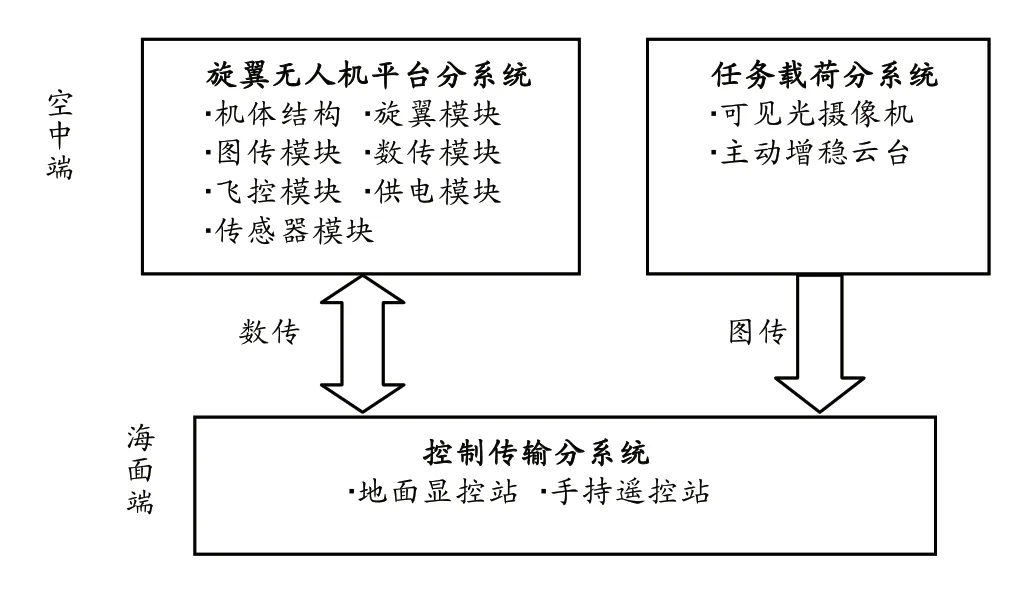
圖1 系統組成圖
旋翼無人機平臺分系統由機體結構、旋翼模塊、圖傳模塊、數傳模塊、傳感器模塊、飛控模塊和供電模塊等組成,具備自主起降、定位懸停、伴隨飛行、失聯返航、低電報警返航和斷槳保護等智能飛控功能,可在遙控與自主導航兩種飛行模式下執行任務。平臺配備意外墜海漂浮裝置,確保無人機意外墜海后無人機平臺及任務載荷能夠安全回收,重要試驗數據無丟失風險。
任務載荷分系統由可見光高清攝像機與主動增穩云臺等組成。高清攝像機具有無級光學變焦拍攝高清圖像能力;主動增穩云臺可有效降低無人機飛行中高頻、低頻振動對拍攝的影響,使拍攝的畫面清晰穩定,具備水平、俯仰和橫滾3軸轉向能力。
控制傳輸分系統由地面顯控站和手持遙控站組成。地面顯控站能夠實現飛行任務設置,實時顯示無人機的位置(經度、緯度、高度)、姿態角(俯仰、滾轉、航向)、航速、電池電壓、飛控通信鏈路質量參數和航拍實況圖像;手持遙控站可帶屏操作。
2 影響艦基旋翼無人機海上航空拍攝要素
2.1 環境調度
無人機在海上運動平臺上起降和飛行受起降場地、海況等級和風力等級等多種因素影響[8]。應視無人機展開尺寸,合理選擇起降區域,避開桅桿、線纜等障礙物,充分預留空間供無人機起降,一般以艦尾甲板為宜;實時關注艦船平臺受浪涌影響情況,因浪涌作用,甲板長期處于6自由度運動狀態,橫搖、縱搖和升沉等3個自由度對無人機著艦影響最大,當艦船運動幅度超出允許邊界時,如果強行降落,可能導致起落架受到嚴重撞擊,甚至造成單點觸艦而導致側翻,因艦船搖擺和浪涌周期不同、互相抵消,艦船在每3—4個浪涌后會出現一個5~37 s的平靜期,應避免無人機在平臺搖擺/升沉幅度過大工況下完成起降操作,保證飛機硬件系統中的IMU、GPS和磁羅盤等傳感器模塊在相對平穩環境中完成初始化,通過飛控自檢;實時利用測風儀測量風速、風向,考慮艦船航行風作用影響,不可直接采用氣象風數據。當實測瞬時風速大于飛機最大抗風能力時,謹慎飛行操作,留出速度余量,上調報警電壓,確保安全返航。風速矢量關系如圖2所示。

圖2 風速矢量關系圖
2.2 視場選擇
為獲取最佳試驗實況信息,應綜合考慮拍攝需求、艦船航行以及無人機自身飛行控制等要素,無人機起飛后根據任務需要在空中作出定點懸停、伴航飛行和環繞飛行等動作,機載攝像機搜尋試驗實況目標區域并拍攝成像,飛行高度選擇應以達到覆蓋試驗現場全局、不影響艦船航行安全為原則,避免出現在艦船航線正上方和逆光拍攝位置,嚴格控制無人機飛行速度與艦船航行速度大體一致,利用地面設備嚴密監控無人機空中飛行狀態以及與艦艇間相對位置,防止云臺水平/俯仰調整加速度過大至圖像模糊,調節鏡頭焦距獲得適宜視場角后保持狀態。以無人機位艦船正后方900 m,飛行高度200 m,兩者保持相對靜止,機載攝像機的最大視場角為50°×28°為例,根據幾何關系可以算出,將試驗目標調整至畫幅下部時,系統拍攝縱向視場高度約為448 m,橫向視場寬度約為839 m,為此狀態下可覆蓋最大視場。
2.3 手法應用
無人機航拍主要包含升降拍攝、平移拍攝、環繞拍攝和跟蹤拍攝等4種拍攝手法[9]。升降拍攝構圖連續轉換,能夠由近及遠展現大范圍場景/由遠及近縮小展示范圍直到停留在具體事物,適合表現人或物在環境中所處的位置;平移拍攝分為前后平移拍攝和左右平移拍攝,適用于表現距離長、面積大的拍攝對象,無人機保持固定高度飛行,拍攝鏡頭延伸感更強;環繞拍攝是指無人機以固定坐標點為圓心、一定距離為半徑拍攝,適用于突出表現目標物體,可全方位展示前景,背景變化迅速,具有較強的視覺沖擊效果;跟蹤拍攝是指無人機跟隨運動物體移動拍攝,可更為輕松鎖定拍攝目標,到達攝影師難以接近的拍攝點,不受自然條件的限制而保持鏡頭的連續性。基于試驗實況航拍的實際需求,針對海上作業現實特點,應主要采用跟蹤拍攝與升降拍攝相結合的拍攝手法,以環繞拍攝和平移拍攝為輔助手段。
2.4 鏈路控制
試驗實況航拍無人機的主要任務為在遠程遙控狀態下實時、穩定攝錄回傳試驗實況視頻數據。無人機圖傳是指采用視頻壓縮、信號處理和調制解調等技術將機載攝像機采集的視頻數據以無線方式實時傳送至遠端接收設備的系統[10]。受艦載各類電子設備影響,無人機工作的頻譜環境較為復雜,可預先利用便攜式頻譜儀測量空間頻譜分布情況,按照現場實際,合理設置圖傳信號中心頻率,避開艦載電子設備工作頻段,保證回傳圖像質量穩定、可靠,帶寬設置應防止過寬,保證信號能量集中,圖傳距離具備保障。無人機數傳雖多為跳頻設計,但數傳頻率可選區間有限,當外界頻譜環境惡劣時,不應執行飛行操作。
2.5 模式設置
無人機在GPS定位模式下,磁羅盤參與工作用以定向。磁羅盤工作原理是利用地磁場固有指向性測量空間姿態角度,地磁場強度約為0.4~0.65 Gs,用于計算航向的水平分量十分小,易受外界磁性環境干擾影響。艦船本身主要由鋼鐵制造,會對周圍磁場環境產生干擾,受到磁場的影響,導致方向傳感錯誤,無人機會向某個方向漂移,產生碰撞風險,故磁羅盤校準應在無人機上艦之前完成,不要在建筑內或船邊等強磁體環境下校準,并將起飛飛行模式設置為姿態模式,若無人機采用雙GPS差分定向技術替代磁羅盤,則起飛模式設置可繼續采用GPS定位模式。此外,因無人機起飛時會記錄現有坐標為返航點,當艦船平臺運動后,無人機墜海風險極高,應避免執行“一鍵返航”命令,并將無人機失控保護模式設置為“失控懸停”。
3 艦基旋翼無人機海上作業安全性分析
旋翼無人機海上作業飛行安全難度遠高于陸上飛行,由于動態艦面效應、船上建筑干擾、艦船六自由度運動以及水文氣象條件等各方面因素影響,無人機起降、飛行中易發生狀態不穩和抖動現象,作業難度較大。
模糊綜合評判方法能夠根據實際需要,靈活構造模糊因素集、權集、評判集和綜合運算模型,無人機自身、平臺艦艇、海上環境和操管人員水平是影響其作業安全性的重要因素[11-12]。本文利用模糊綜合評判法對旋翼無人機海上作業安全進行評估,建立模型如下:采用模糊綜合評估法建立層次遞階圖,目標層為旋翼無人機海上安全作業,第一、二層分別是4個關鍵影響因素與對應具體內容,詳見圖3。
為達成旋翼無人機海上安全作業目標,建立第一層指標集b={b1,b2,b3,b4},第二層指標集b1={b11,b12,b13,b14},b2={b21,b22,b23},b3={b31,b32,b33},b4={b41,b42},記第一層指標bi(i=1,2,3,4),bi包含的次層指標bij(1≤j≤qi),qi為bi包含的指標數,各層指標權重分別為wi、wij,滿足:
評估方法中,先由底層基本指標來給出上層指標的評估結果,采取逐層向上方式,綜合得到目 標能力的評估結果。確定評語集V= {V1,V2,....,Vn},評語Vg(1 ≤g≤n) 表示各指標評價等級,對應評價值可表示為p(V) = {p(V1),p(V2),...p(Vn)}。設指標bij(1 ≤j≤qi) 關于等級Vg的隸屬度為rjg,則對指標bij的單因素評價為Rij= (rj1,rj2,...,rjn),從而可知第一層指標bi的綜合評判矩陣為:
經模糊變換,可得Bi={bi1,bi2,...,bin} 。令
由式(3)可得評價對象的評價等級量化值,即最終評價結果。
設定海浪3級,風速10 m/s(逆風),能見度1.852 km,艦船平臺運動速度10 kn,駕駛與勤務人員技能水平良好,無人機抗風等級不小于7級,具備北斗/GPS/GLONASS三模衛星導航定位、授時功能,圖、數傳頻譜與船上大型通信設備不沖突,艦船甲板尺寸、安全支援措施等均滿足無人機起降要求。
建立模糊綜合評判模型對艦載旋翼無人機飛行安全進行評估。選取評語集為V={V1(很差),V2(差),V3(一般),V4(較好),V5(好)},對應評價分值分別為:0.1,0.3,0.5,0.7,0.9。艦載旋翼機安全飛行評估第二層指標的權重和在評語集上的隸屬度如表1所示。首層指標的權重由專家直接給出w={w1,w2,w3,w4}={0.3,0.2,0.3,0.2}。
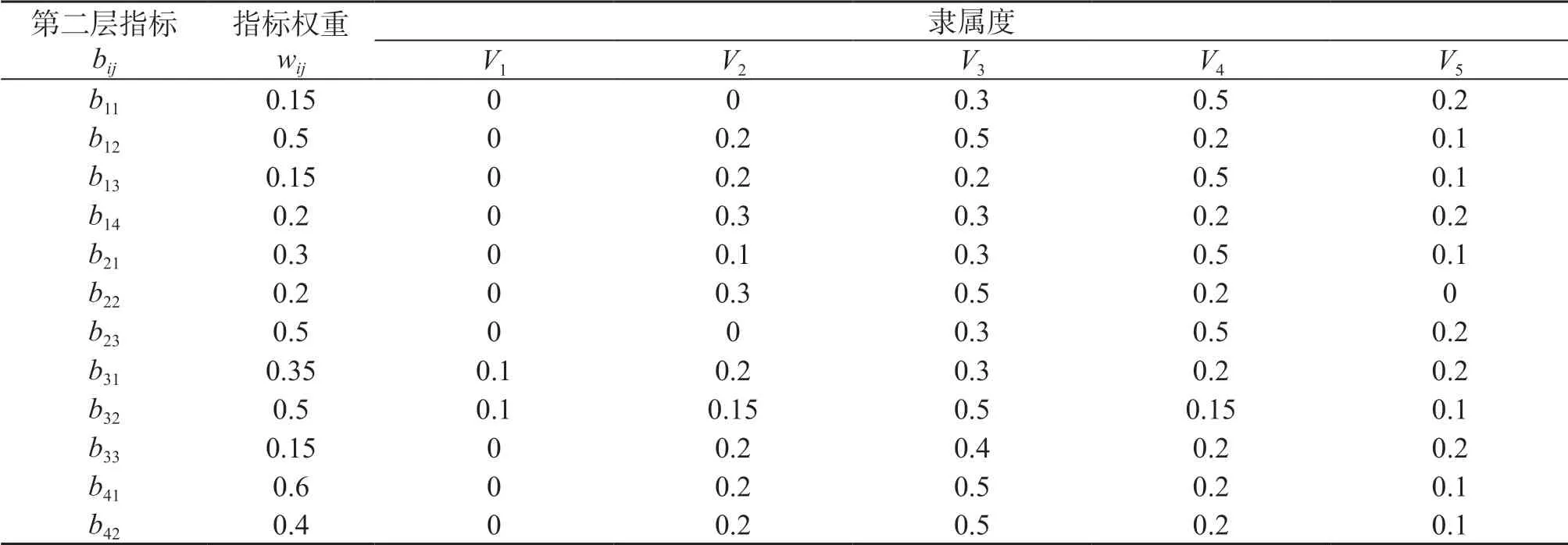
表1 艦載旋翼機安全飛行評估指標、權重和評語集隸屬度的關系
由表1可得的綜合評判矩陣如下。
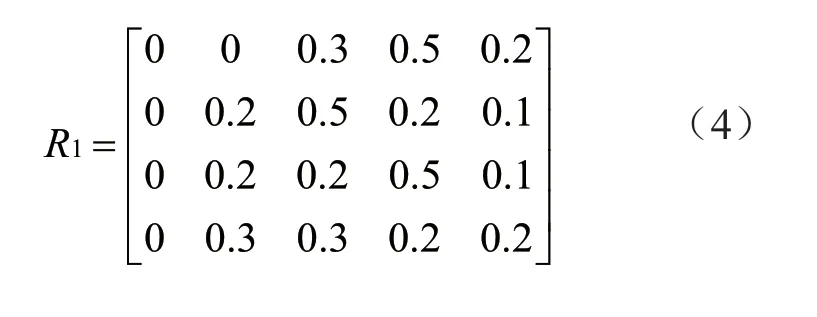
b1={b11,b12,b13,b14}的綜合評判評價向量B1=w1j,R1=(0.000,0.190,0.385,0.290,0.135)。同理可得:

艦載旋翼機安全飛行的綜合評判矩陣為

綜合評價向量B1=w1j,R=(w1,w2,w3,w4),R=(0.0255,0.1675,0.4080,0.2675,0.1315)。
4 結 論
本文基于無人機航空拍攝的一系列優點,對艦基試驗實況航拍無人機的應用特點進行了分析,針對影響艦基旋翼航拍無人機現實應用的關鍵要素進行了重點研究,并利用模糊綜合評判方法建立艦基旋翼無人機飛行安全評估模型,原理清晰,計算便捷,易于操作。所建模型能夠較好地評估艦基旋翼無人機海上作業的安全性,為艦基試驗航拍無人機的應用提供了可行性論證,進一步拓寬了航拍無人機的應用場景,具有一定的工程應用價值。可以預見的是,伴隨無人機控制技術和艦機配合技術的日趨成熟,無人機的使用方法和使用場景也將更加多樣化,無人機航空拍攝將在海上試驗可視化保障中發揮重要作用。
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學版(2020年7期)2020-01-02 10:10:44
趣味(數學)(2018年12期)2018-12-29 11:24:10
小學生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08
