鋼懸鏈線立管舷側(cè)安裝過程動(dòng)力學(xué)仿真及耦合分析
2021-11-05 02:58:16昝英飛祝港袁利毫黃闊黃福祥羅超
哈爾濱工程大學(xué)學(xué)報(bào) 2021年10期
昝英飛, 祝港, 袁利毫, 黃闊, 黃福祥, 羅超
(1.哈爾濱工程大學(xué)船舶與海洋工程學(xué)院,黑龍江 哈爾濱 150001; 2.海洋石油工程股份有限公司, 天津 300461)
鋼懸鏈線立管是20世紀(jì)90年代初期提出的概念,隨著世界第1條鋼懸鏈線立管于1994年,由殼牌公司在墨西哥灣處的一座張力腿平臺(tái)上安裝完成[1]。鋼懸鏈線立管引起了諸多學(xué)者的注意,為了增加鋼懸鏈線立管使用的安全性,各國學(xué)者對(duì)鋼懸鏈線立管展開了一系列研究降低鋼懸鏈線立管使用風(fēng)險(xiǎn)。Mekha等[2]對(duì)PrinceTLP平臺(tái)上鋼懸鏈線立管設(shè)計(jì)過程中的設(shè)計(jì)和疲勞等難題進(jìn)行分析,研究表明鋼懸鏈線立管大偏離角有助于減輕鋼懸鏈線立管在波浪中的疲勞損傷。Nakhaee等[3]研究了海床溝槽對(duì)鋼懸鏈線立管動(dòng)力特性的影響。吳劍國等[4]研究了浮體的慢漂運(yùn)動(dòng)對(duì)鋼懸鏈線立管的影響。Duan等[5]對(duì)深水鋼懸鏈線立管傳遞過程進(jìn)行靜力學(xué)分析,通過大撓度梁理論、Winkler地基模型和懸鏈線方法建立力學(xué)模型,重點(diǎn)研究了海床剛度、水深、初始安裝角度等影響因素。數(shù)值分析結(jié)果表明,在鋼懸鏈線立管傳遞過程中,較硬的海床會(huì)對(duì)鋼懸鏈線立管產(chǎn)生較大的彎曲應(yīng)力,海床剛度對(duì)鋼懸鏈線立管的應(yīng)力影響不大。初始安裝角度越大,水深越深,彎曲應(yīng)力會(huì)越小。Wang等[6]基于非線性大撓度梁理論建立深水緩波立管傳遞過程力學(xué)模型,基于有限差分法對(duì)傳遞過程中立管參數(shù)進(jìn)行一系列數(shù)值分析,研究結(jié)果表明,立管觸地點(diǎn)位置以及軸向張力均呈變化趨勢(shì)。Bai[7]研究了鋼懸鏈線立管的縮小比例模型動(dòng)態(tài)測(cè)試,進(jìn)行不同振幅和頻率下的受迫振動(dòng)分析,并用CABLE3D軟件進(jìn)行時(shí)域數(shù)值分析。研究結(jié)果表明平臺(tái)平面內(nèi)的運(yùn)動(dòng)與立管模型動(dòng)力響應(yīng)一致,觸地點(diǎn)位置隨著船舶偏移而改變,并且立管頂端和觸地點(diǎn)有著較大的內(nèi)力。石錦坤等[8]對(duì)鋼懸鏈立管回接預(yù)鋪設(shè)安裝的關(guān)鍵過程進(jìn)行靜力學(xué)分析,得到絞車受力等數(shù)值結(jié)果,但其在研究過程中并未考慮環(huán)境與船舶運(yùn)動(dòng)影響。Zan等[9]提出了一種鋪管船與管道耦合動(dòng)力學(xué)模型,研究了耦合因素對(duì)鋪管船和管道動(dòng)力學(xué)的影響。Han等[10]基于“S”型鋪設(shè),提出了一種鋪管船-纜繩-管道終端-管道的時(shí)域耦合模型,研究了管道終端設(shè)施在全耦合作用下的動(dòng)力學(xué)特性。尤巖巖等[11]研究了平臺(tái)激勵(lì)下鋼懸鏈線立管觸地點(diǎn)附近的動(dòng)力響應(yīng),研究結(jié)果發(fā)現(xiàn),平臺(tái)的垂蕩運(yùn)動(dòng)對(duì)鋼懸鏈線立管觸地區(qū)響應(yīng)影響最大、縱蕩次之、橫蕩影響最小。
以上研究內(nèi)容得出了諸多影響鋼懸鏈線立管應(yīng)力的結(jié)果,鋼懸鏈線立管舷側(cè)安裝作為一種工程中新的鋼懸鏈線立管安裝方法,尚未有針對(duì)船舶-鋼懸鏈線立管-收放(abandonment & recovery, A&R)纜多系統(tǒng)耦合動(dòng)力學(xué)響應(yīng)的數(shù)值仿真研究,本文依托于國內(nèi)水深為1500級(jí)的陵水17-2工程項(xiàng)目,基于有限元法建立安裝A&R纜與鋼懸鏈線立管模型并進(jìn)行舷側(cè)安裝過程仿真,分析在舷側(cè)安裝過程中A&R纜以及鋼懸鏈線立管的彎矩與張力,以及安裝作業(yè)船舶-鋼懸鏈線立管-A&R纜在動(dòng)力定位系統(tǒng)控制下的耦合因素影響。
1 鋼懸鏈線立管舷側(cè)安裝作業(yè)
1.1 鋼懸鏈線立管舷側(cè)安裝作業(yè)流程
鋼懸鏈線立管布放一般可分為鋪管——提管——移管3個(gè)過程[12],其中提管過程是鋼懸鏈線立管舷側(cè)安裝的主要過程,本文依托陵水17-2工程項(xiàng)目開展6"鋼懸鏈線立管舷側(cè)安裝過程動(dòng)力學(xué)仿真及耦合分析研究,本文以“海洋石油201”作為安裝船進(jìn)行鋼懸鏈線立管的安裝作業(yè)。立管提升作業(yè)如圖1所示,提管過程首先需要“海洋石油201”船到達(dá)海床上的鋼懸鏈線立管首端所在位置,通過舷側(cè)系統(tǒng)垂直下放A&R纜連接海床上鋼懸鏈線立管,然后繼續(xù)下放A&R纜并駛離平臺(tái)至安全距離后,向平臺(tái)方向靠近,通過舷側(cè)的管道回收系統(tǒng)回收A&R纜,將海床處的鋼懸鏈線立管逐漸提升,直至“海洋石油201”船行駛至目標(biāo)位置。
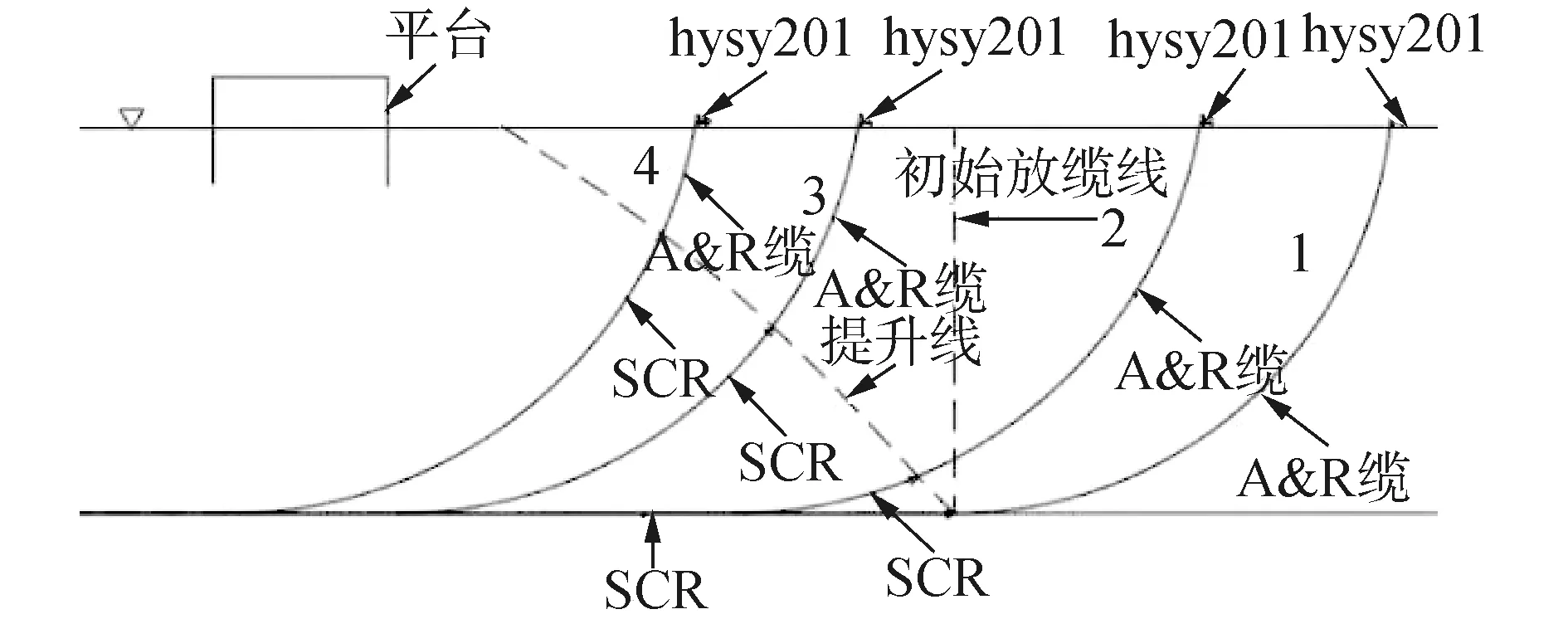
圖1 鋼懸鏈線立管提升作業(yè)流程Fig.1 Steel catenary riser lifting operation
1.2 主要設(shè)備參數(shù)
1.2.1 鋼懸鏈線立管主要參數(shù)
本文選用鋼懸鏈線立管型號(hào)為6"MEG(Monoethylene glycol),管材為API-5L-X65的鋼管。其主要參數(shù)如表1所示。
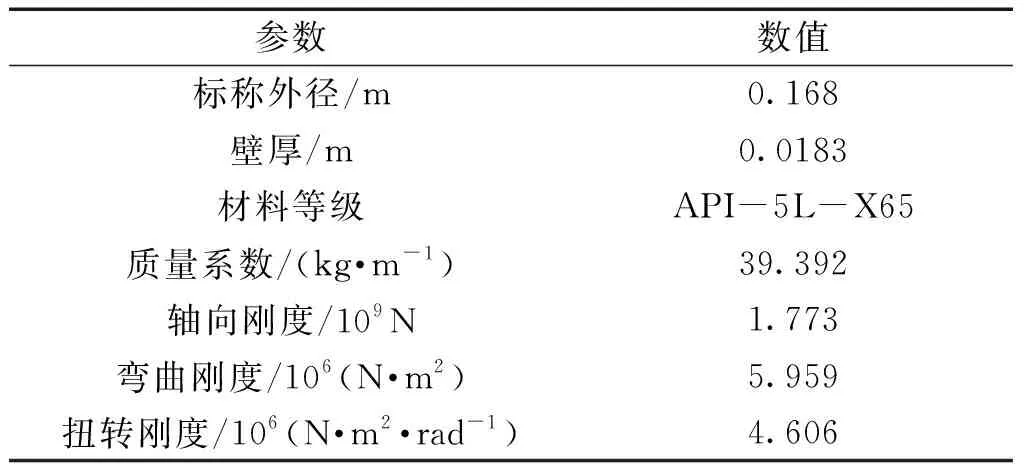
表1 6"鋼懸鏈線立管主要參數(shù)Table 1 The main parameters of 6"steel catenary riser
1.2.2 A&R纜主要參數(shù)
A&R纜常用于深水作業(yè),主要用于下放立管和回收立管,軸向剛度需保證在作業(yè)過程中不會(huì)輕易破損,A&R纜設(shè)計(jì)參數(shù)如表2所示。由于A&R纜的幾乎沒有彎曲剛度、剪切剛度和扭轉(zhuǎn)剛度,可以忽略不計(jì)。
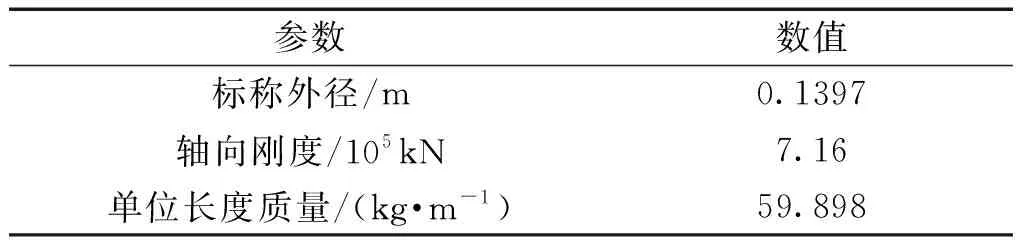
表2 A&R纜設(shè)計(jì)參數(shù)Table 2 The parameters of A&R cable
1.2.3 舷側(cè)安裝系統(tǒng)
舷側(cè)安裝系統(tǒng)位于安裝作業(yè)船“海洋石油201”船左舷位置處,其作用是提升深水海底管道至適當(dāng)位置。如圖2所示,舷側(cè)安裝系統(tǒng)由2根支腿和一個(gè)橫梁組成的框架結(jié)構(gòu)、一組位于橫梁中心的A&R纜滑輪、一個(gè)可以調(diào)整角度的柱狀框架結(jié)構(gòu)以及一個(gè)固定裝置的柱狀結(jié)構(gòu)組成。在舷側(cè)安裝系統(tǒng)頂部滑輪處裝有張力極限為400 t的絞車,通過調(diào)整角度,將A&R纜垂直下放至海底與立管進(jìn)行連接,通過回收A&R纜完成立管的提升。

圖2 舷側(cè)安裝系統(tǒng)Fig.2 The installation system
2 耦合仿真模型搭建
耦合仿真模型如圖3所示,主要由安裝船“海洋石油201”、A&R纜、6”鋼懸鏈線立管3部分組成,耦合模型中的各部分都受到環(huán)境載荷的作用,“海洋石油201”船與A&R纜通過A&R纜頂端張力作用相互拖動(dòng),在A&R纜與6”鋼懸鏈線立管間存在張力作用,除此之外,6”鋼懸鏈線立管觸地段還受到海床支撐作用。當(dāng)“海洋石油201”偏離目標(biāo)位置時(shí),動(dòng)力定位系統(tǒng)計(jì)算當(dāng)前位置與輸入目標(biāo)位置得到偏差,計(jì)算各推進(jìn)器復(fù)位需提供的推力,推力作用于船舶,船舶運(yùn)動(dòng)位置改變,鋼懸鏈線立管與A&R纜軸向張力隨之改變,新的循環(huán)產(chǎn)生,為保證船舶定位于目標(biāo)位置,該循環(huán)系統(tǒng)會(huì)持續(xù)工作。
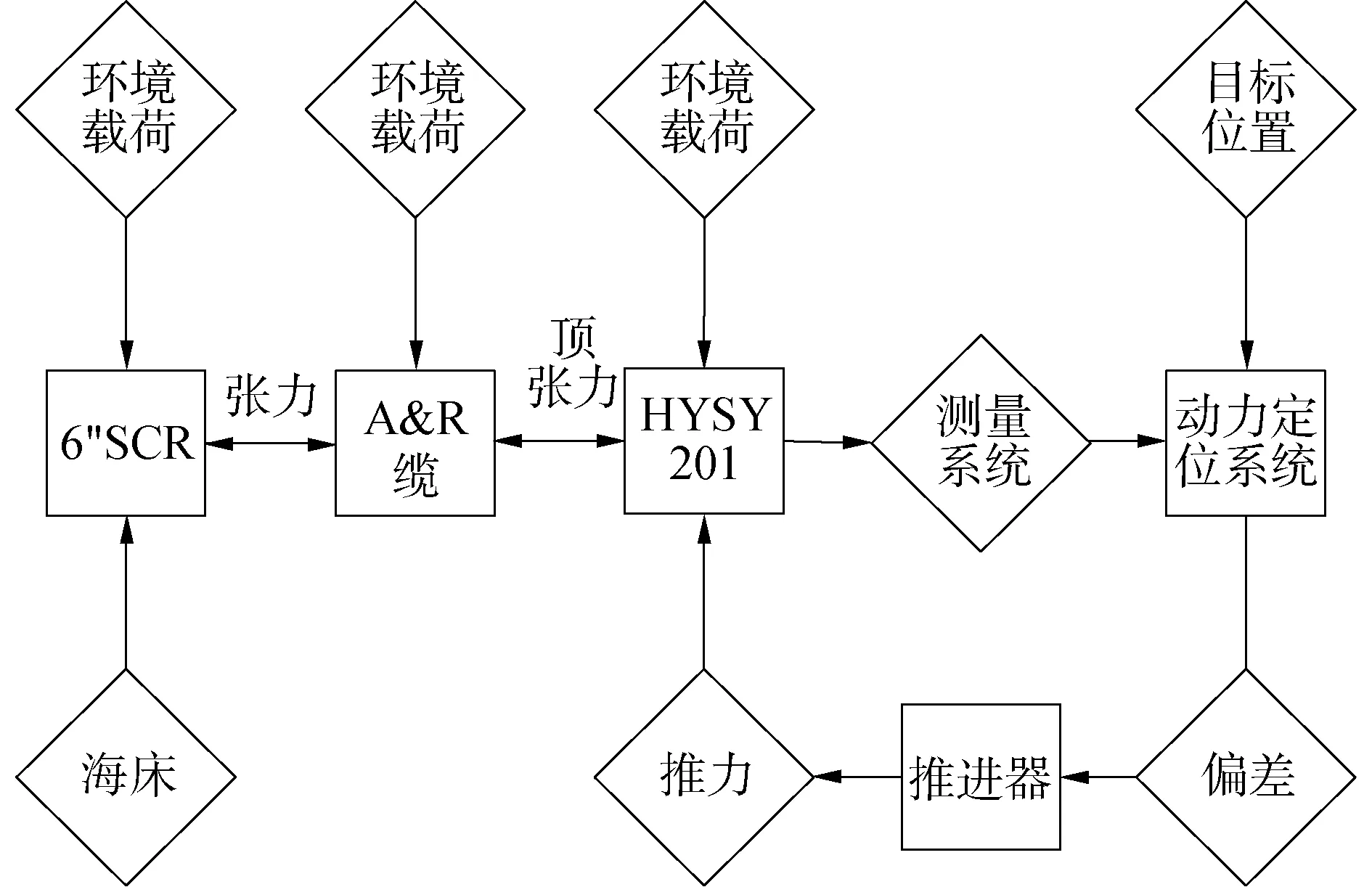
圖3 仿真模型耦合系統(tǒng)Fig.3 The coupling system of simulation model
基于牛頓第二定律,安裝作業(yè)船舶的六自由度運(yùn)動(dòng)方程可以表示為:
(1)
式中:M表示慣性矩;x(t)為作業(yè)船舶的運(yùn)動(dòng);FR(t)為作業(yè)船舶強(qiáng)迫振動(dòng)時(shí)所產(chǎn)生的輻射力;FH(t)為船舶偏離平衡位置而產(chǎn)生的靜水回復(fù)力;FW(t)為作用于作業(yè)船舶上的波浪力;FE(t)為其他荷載:
FE(t)=Fc(t)+Fw(t)+Fd(t)+FT(t)
(2)
式中:Fc(t)表示流作用力;Fw(t)表示風(fēng)作用力;Fd(t)表示動(dòng)力定位的推進(jìn)器系統(tǒng)的作用力;FT(t)表示舷側(cè)頂張力。
2.1 船舶時(shí)域仿真理論
三維勢(shì)流理論是將結(jié)構(gòu)物周圍流場(chǎng)中的流體視為均勻、不可壓縮、無旋、無粘的流體,此時(shí)可用速度勢(shì)的梯度來表示流場(chǎng)的速度。在勢(shì)流理論中,微幅波問題可以轉(zhuǎn)化為入射繞射和輻射問題,即在微幅波假定下的波浪流場(chǎng)中的速度勢(shì)可用入射勢(shì)、繞射勢(shì)和輻射勢(shì)來表示,即:
(3)
式中:φI為入射勢(shì);φD為繞射勢(shì);φRj為j個(gè)運(yùn)動(dòng)模態(tài)下的輻射勢(shì)。
在理想流體狀況下可用最基本的Laplace方程來求解速度勢(shì),在微幅波條件下,運(yùn)用線性理論可以得到空間定常流動(dòng)不可壓縮流體速度勢(shì)的基本控制方程和其定解條件:
控制方程:
▽2φ(x,y,z)=0
(4)
邊界條件:
(5)
(6)
(7)
輻射條件:
(8)
式中:xj是在j個(gè)運(yùn)動(dòng)模態(tài)下的運(yùn)動(dòng)幅值;nj是在j個(gè)運(yùn)動(dòng)模態(tài)下的廣義法向分量;k為輻射波的波數(shù)。根據(jù)入射勢(shì)、繞射勢(shì)、輻射勢(shì)各自的定解條件最終求得速度勢(shì)。
分別計(jì)算各個(gè)浪向下“海洋石油201”船垂蕩、縱搖以及橫搖下的運(yùn)動(dòng)幅值響應(yīng)算子(response amplitude operaters, RAO),計(jì)算結(jié)果與船模試驗(yàn)下的結(jié)果對(duì)比后基本吻合。具體計(jì)算結(jié)果見圖4。
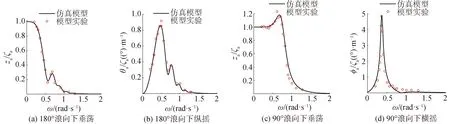
圖4 各浪向下RAOFig.4 The RAO in each direction
2.2 鋼懸鏈線立管與A&R纜動(dòng)力學(xué)仿真原理
基于連續(xù)介質(zhì)力學(xué)理論,采用有限元法建立鋼懸鏈線立管與A&R纜相關(guān)理論模型。材料中微粒的運(yùn)動(dòng)可用拉格朗日方程表示,微小粒子在以基向量Ii定義的坐標(biāo)系中運(yùn)動(dòng)如圖5所示[13]。
粒子P在任意結(jié)構(gòu)形態(tài)中都可通過位置矢量X來辨別,如圖5所示,P在C0結(jié)構(gòu)中的運(yùn)動(dòng)可表示為:
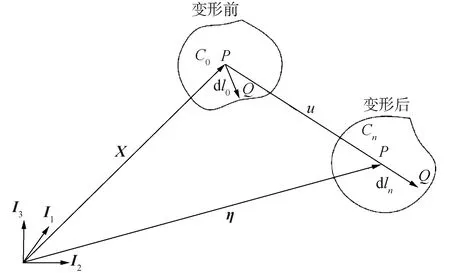
圖5 微小粒子在空間中的運(yùn)動(dòng)Fig.5 The motion of small particles in space
η=η(X,t)
(9)
式中:η表示表示微粒經(jīng)過時(shí)間t后所在的位置矢量;X表示粒子P在初始時(shí)的位置矢量;t表示運(yùn)動(dòng)的時(shí)長,位移矢量為:
η=X+u
(10)
拉格朗日公式中,應(yīng)變可通過Green應(yīng)變張量E來測(cè)量,以初始結(jié)構(gòu)C0為例,應(yīng)變張量可定義為:
dln2-dl02=dX·E·dX
(11)
式中:dl0表示PQ形變前長度;dln表示PQ形變后長度。
空間有限元系統(tǒng)模型的動(dòng)態(tài)平衡一般可以表達(dá)為:

(12)

3 鋼懸鏈線立管安裝過程耦合仿真分析
3.1 作業(yè)仿真工況
3.1.1 環(huán)境參數(shù)
中國南海北部陵水17-2氣田所在的海域?qū)崪y(cè)取得環(huán)境參數(shù)如表3所示。風(fēng)浪流方向?yàn)?0°,垂直于“HYSY201”船中縱剖面。

表3 作業(yè)環(huán)境參數(shù)Table 3 Working environment parameters
3.1.2 立管安裝階段參數(shù)
為了方便對(duì)比分析將安裝過程按照船舶距平臺(tái)位置劃分為5個(gè)作業(yè)階段,具體安裝階段參數(shù)如表4所示。
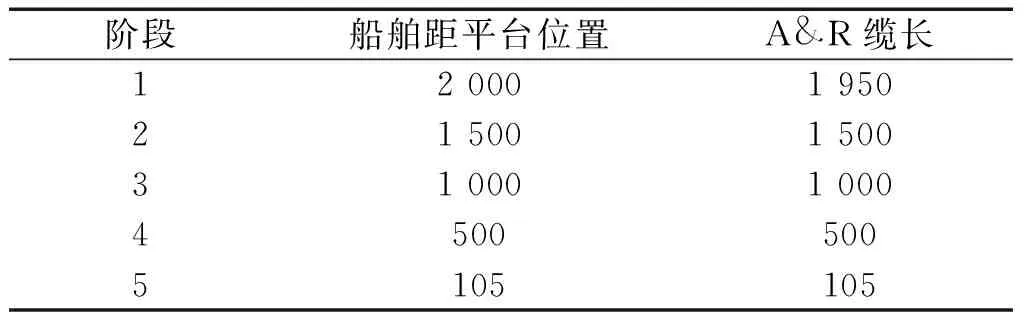
表4 安裝階段參數(shù)Table 4 Installation process parameters m
3.2 耦合仿真模型驗(yàn)證
為了驗(yàn)證模型建立的準(zhǔn)確性,以第5階段為例,將本文計(jì)算的結(jié)果與商用軟件Orcaflex計(jì)算結(jié)果進(jìn)行了對(duì)比,對(duì)比靜態(tài)結(jié)果如圖6、圖7所示,可以看出鋼懸鏈線立管與A&R纜的軸向拉力分布與彎矩分布幾乎沒有差異。為進(jìn)一步驗(yàn)證模型準(zhǔn)確性,本文模型所計(jì)算的A&R纜頂張力時(shí)歷結(jié)果也需要與Orcaflex結(jié)果進(jìn)行對(duì)比,考慮到Orcaflex沒有動(dòng)力定位模塊,無法進(jìn)行全耦合模型仿真,故將本文模型所得船舶六自由度作為Orcaflex輸入?yún)?shù),確保運(yùn)動(dòng)狀態(tài)一致,頂張力時(shí)歷對(duì)比結(jié)果如圖8所示,對(duì)比結(jié)果基本一致,得以驗(yàn)證本文所用仿真模型準(zhǔn)確性。
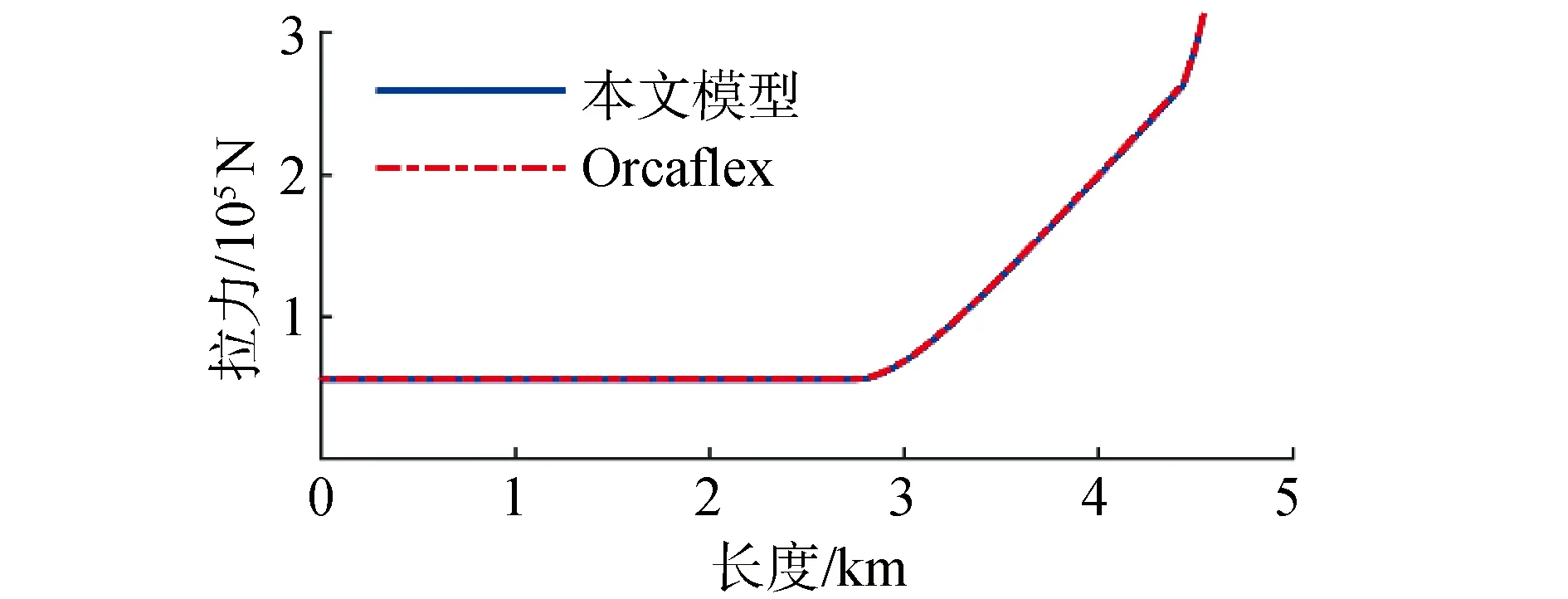
圖6 鋼懸鏈線立管與A&R纜拉力分布Fig.6 Tension distribution of SCR and A&R cables
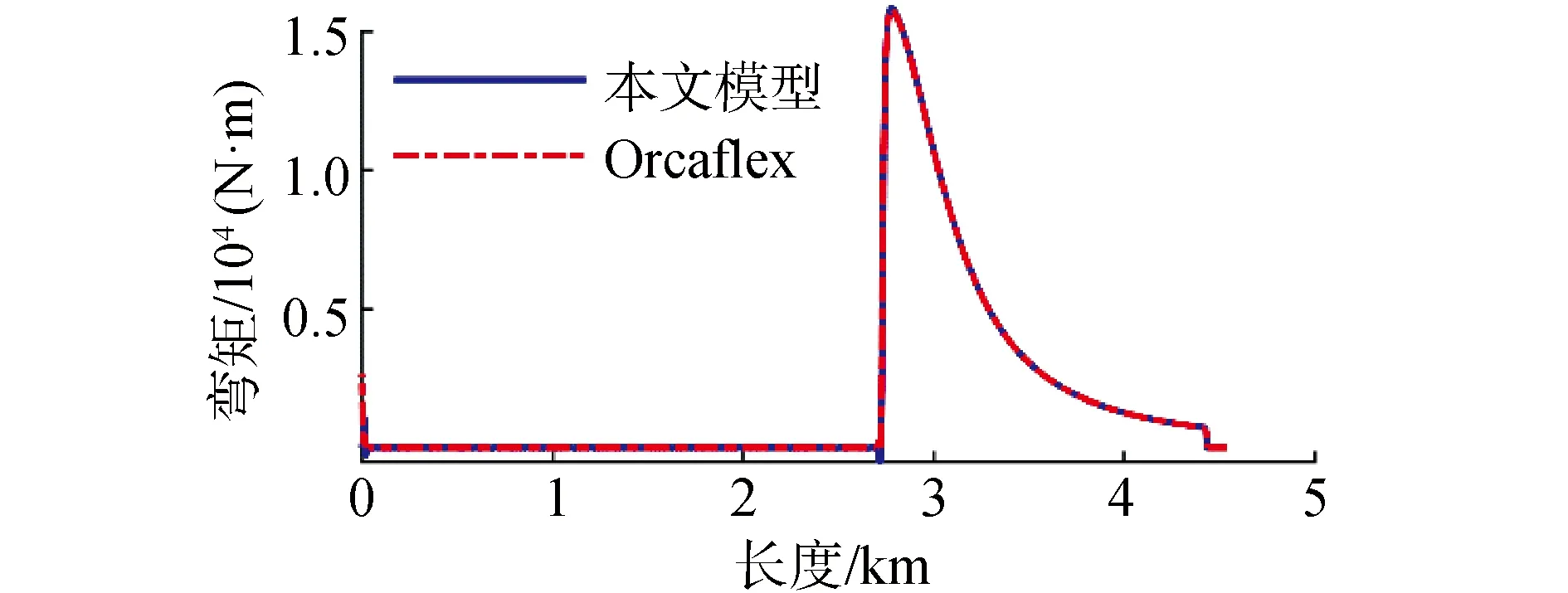
圖7 鋼懸鏈線立管與A&R纜彎矩分布Fig.7 Moment distribution of SCR and A&R cables

圖8 頂張力時(shí)歷對(duì)比Fig.8 The time histories of top tension
3.3 靜力學(xué)計(jì)算結(jié)果
如圖9所示為5個(gè)階段下鋼懸鏈線立管與A&R纜拉力分布,圖中虛線部分為A&R纜各段拉力,實(shí)線部分為鋼懸鏈線立管各段拉力。通過分析發(fā)現(xiàn),由于舷側(cè)位置受到A&R纜頂端向下作用力,各階段下海床上的鋼懸鏈線立管與A&R纜所受拉力基本一致。由于重力的作用,在懸垂段隨著長度增加,鋼懸鏈線立管與A&R纜所受拉力增加。由于A&R纜的質(zhì)量系數(shù)比鋼懸鏈線立管要高,在A&R纜與鋼懸鏈線立管2段有著較為明顯的單位長度上拉力增加程度的變化。著船舶向海洋平臺(tái)靠近,鋼懸鏈線立管懸垂長度增加,使用的A&R纜懸垂長度減少,隨著整個(gè)懸垂段重力減小,張緊器所需要提供的張力也會(huì)越來越小。如表5所示為各階段下頂張力A&R纜所受張力,最大值發(fā)生在初始階段,最大值為835.5 kN,小于其承受極限400 t,在作業(yè)安全范圍內(nèi)。
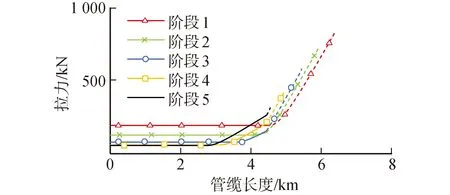
圖9 鋼懸鏈線立管與A&R纜各段初始拉力Fig.9 Initial tension of SCR and A&R cable

表5 各階段下頂張力Table 5 The top tension of each step
圖10為5個(gè)階段下鋼懸鏈線立管與A&R纜彎矩分布,表6為各階段下最大彎矩。其中分界線標(biāo)志著鋼懸鏈線立管與A&R纜的交點(diǎn),在分界線左側(cè)為鋼懸鏈線立管段,右側(cè)為A&R纜段,從圖10中可以看到,由于海床整體平整,鋼懸鏈線立管基本不會(huì)彎曲,在海床上的鋼懸鏈線立管所受彎矩作用約為零。在海床上的鋼懸鏈線立管由于末端固定,末端處鋼懸鏈線立管局部曲率較大,會(huì)產(chǎn)生較大的彎矩。A&R纜彎曲剛度在仿真中忽略不計(jì),所以A&R纜不會(huì)產(chǎn)生彎矩。對(duì)比分析彎矩圖可知在鋼懸鏈線立管在觸地點(diǎn)位置附近會(huì)產(chǎn)生最大彎矩,因?yàn)榇藭r(shí)鋼懸鏈線立管曲率達(dá)到最大。隨著船舶向平臺(tái)位置靠近,由于鋼懸鏈線立管觸底點(diǎn)與末端固定點(diǎn)距離逐漸縮短,觸地點(diǎn)附近曲率逐漸增大,因此管道最大彎矩會(huì)越來越大,且最大彎矩位置向管道末端逐漸靠攏。鋼懸鏈線立管在最終階段時(shí)彎矩極值最高,最大值為15.82 kN·m。對(duì)同一作業(yè)階段下的彎矩變化而言,在觸地點(diǎn)附近時(shí)鋼懸鏈線立管曲率達(dá)到最大,此時(shí)鋼懸鏈線立管彎矩達(dá)到最大,在鋼懸鏈線立管懸垂段曲率變化率逐漸減小。鋼懸鏈線立管彎矩變化越來越緩慢,在到達(dá)與A&R纜連接處會(huì)減少為0。在第一階段時(shí),由于此時(shí)鋼懸鏈線立管未被提升,所以沒有像其他4個(gè)階段在觸地點(diǎn)產(chǎn)生大彎矩,在這個(gè)作業(yè)狀態(tài)時(shí)的最大彎矩發(fā)生在鋼懸鏈線立管末端固定端,彎矩最大值為1075 N·m。
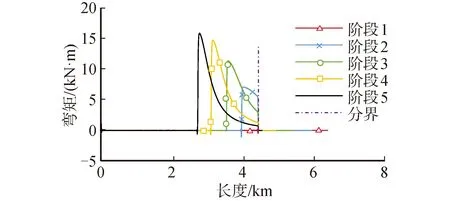
圖10 鋼懸鏈線立管與A&R纜各段所受彎矩Fig.10 The bending moment of SCR and A&R cable

表6 各階段下最大彎矩Table 6 The maximum bending moment of each step
3.4 動(dòng)力學(xué)計(jì)算結(jié)果
圖11是初始階段“海洋石油201”船六自由度運(yùn)動(dòng)的時(shí)歷曲線。表7為初始階段下船舶1 000 s內(nèi)六自由度運(yùn)動(dòng)特征數(shù)據(jù)。如圖11(a)~11(c)所示,由于船舶舷側(cè)受到A&R纜與鋼懸鏈線立管產(chǎn)生的拉力,所以船舶運(yùn)動(dòng)的初始6自由度狀態(tài)并非為0,而是向舷側(cè)系統(tǒng)所在位置發(fā)生了一定傾斜。
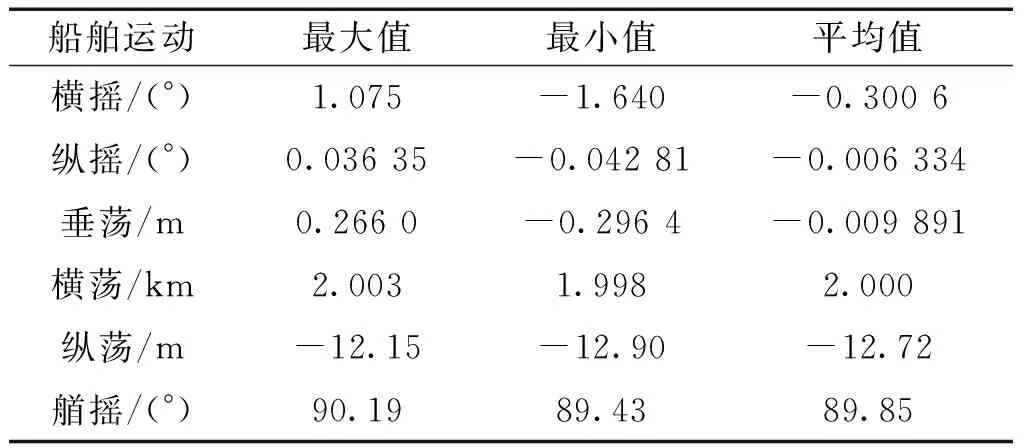
表7 船舶六自由度運(yùn)動(dòng)Table 7 The six degrees of freedom motion of ship

圖11 六自由度運(yùn)動(dòng)時(shí)歷曲線Fig.11 The time histories of six dements
船舶在橫搖、縱搖以及垂蕩3個(gè)自由度上的變化較為劇烈,由于風(fēng)浪流垂直作用于船的中縱剖面,船舶橫搖幅度較大,在2.715°范圍內(nèi)搖動(dòng),船舶縱搖、垂蕩幅度總體較小,船舶縱搖在0.079 16°范圍內(nèi)搖動(dòng),船舶垂蕩在0.562 4 m范圍內(nèi)運(yùn)動(dòng),船舶在這3個(gè)自由度方向的運(yùn)動(dòng)符合海上船舶運(yùn)動(dòng)規(guī)律。船舶在橫蕩、縱蕩以及艏搖3個(gè)自由度方向的運(yùn)動(dòng)由動(dòng)力定位系統(tǒng)控制,在推進(jìn)器推力作用下,船舶在這3個(gè)自由度上始終在目標(biāo)位置附近進(jìn)行運(yùn)動(dòng),且運(yùn)動(dòng)較為平穩(wěn),同樣由于風(fēng)浪流作用,船舶橫蕩幅度較大,在5 m范圍內(nèi)運(yùn)動(dòng),船舶縱蕩與艏搖運(yùn)動(dòng)幅度較小,船舶縱蕩在0.75 m范圍內(nèi)運(yùn)動(dòng),船舶艏搖在0.76°范圍內(nèi)搖動(dòng)。
圖12為在鋼懸鏈線立管舷側(cè)安裝不同階段下,船舶舷側(cè)位置最大頂張力以及鋼懸鏈線立管最大彎矩變化曲線。如圖12所示,在整個(gè)作業(yè)過程中,隨著鋼懸鏈線立管的逐漸提升,船舶所受的頂張力在逐漸減小,而鋼懸鏈線立管所承受的最大彎矩則是在逐漸增加。最大頂張力發(fā)生在作業(yè)船舶距平臺(tái)2 000 m位置處,最大彎矩則發(fā)生在鋼懸鏈線立管安裝最終位置處,與靜力學(xué)仿真結(jié)論一致。
為了減小安裝過程中的風(fēng)險(xiǎn),對(duì)仿真工程中最大風(fēng)險(xiǎn)位置進(jìn)行動(dòng)態(tài)分析校核,圖13為最大頂張力時(shí)歷變化曲線,圖14與圖15分別為最大彎矩時(shí)歷變化曲線與最大彎曲應(yīng)力時(shí)歷變化曲線。
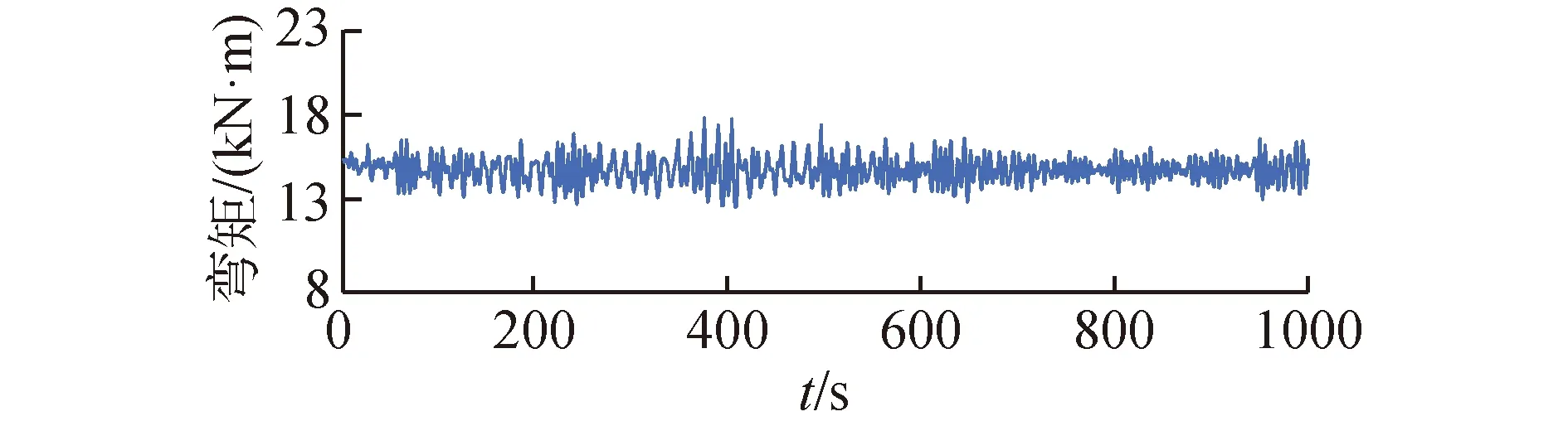
圖14 彎矩時(shí)歷曲線Fig.14 The time histories of bending moment
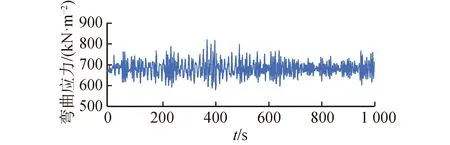
圖15 彎曲應(yīng)力時(shí)歷曲線Fig.15 The time histories of bending stress
如圖13~15所示,頂張力、彎矩和彎曲應(yīng)力都隨著船舶的運(yùn)動(dòng)發(fā)生著變化,表8為1 000 s時(shí)歷內(nèi)頂張力與彎矩特征值。在1 000 s內(nèi)頂張力的最大值為930.6 kN,比靜力計(jì)算結(jié)果增加11.4%,最小值為737.1 kN,比靜力計(jì)算結(jié)果減小11.8%。1 000 s內(nèi)頂張力的平均值為836 kN,與靜力分析時(shí)的初始力基本一致。對(duì)比分析船舶運(yùn)動(dòng)時(shí)歷曲線與頂張力時(shí)歷曲線,可知船舶六自由度運(yùn)動(dòng)與頂張力變化有一定聯(lián)系,船舶的運(yùn)動(dòng)對(duì)頂張力的變化影響非常大,在動(dòng)力定位系統(tǒng)的影響下船舶不會(huì)偏移初始位置太多,A&R纜頂端位置在區(qū)間內(nèi)運(yùn)動(dòng),所以頂張力在193.5 kN波動(dòng)。彎矩在時(shí)域內(nèi)最大彎矩為17.96 kN·m,較靜力計(jì)算值增加13.5%,時(shí)域內(nèi)最小彎矩為12.80 kN·m,較靜力計(jì)算值減小19.1%,時(shí)域內(nèi)彎矩平均值為14.97 N·m。同頂張力一樣,彎矩受船舶運(yùn)動(dòng)影響較大,由于動(dòng)力定位系統(tǒng)的影響,A&R纜與鋼懸鏈線立管懸垂段形態(tài)穩(wěn)定在一定范圍內(nèi),所以觸地點(diǎn)彎矩在5.16 kN·m波動(dòng)。在整個(gè)安裝過程中鋼懸鏈線立管承受的最大彎曲應(yīng)力為81.82 kN/m2。

表8 頂張力與彎矩特征值Table 8 Eigenvalues of top tension and bending moment
4 結(jié)論
1)由于重力的作用,在懸垂段隨著長度增加,鋼懸鏈線立管與A&R纜所受拉力增加。由于A&R纜重度大于鋼懸鏈線立管重度,且在舷側(cè)安裝過程中懸垂段A&R纜長度減少并且懸垂段總長減少,舷側(cè)安裝過程的初始階段,A&R纜頂端張力最大。
2)當(dāng)觸地點(diǎn)存在時(shí),鋼懸鏈線立管的最大彎矩發(fā)生在觸地點(diǎn)附近,舷側(cè)安裝過程中鋼懸鏈線立管觸地點(diǎn)附近曲率越來越大,所以其最大彎矩值在逐漸增加,舷側(cè)安裝過程的最終階段,鋼懸鏈線立管所受彎矩最大。
3)在耦合作用下,船舶在橫搖縱搖垂蕩3個(gè)自由度方向運(yùn)動(dòng)符合海上船舶運(yùn)動(dòng)規(guī)范,船舶在橫蕩縱蕩以及艏搖3個(gè)自由度方向會(huì)在目標(biāo)位置附近運(yùn)動(dòng),且由于風(fēng)浪流方向垂直于船的中縱剖面,船舶在橫搖以及橫蕩方向運(yùn)動(dòng)幅度較大。
4)在耦合作用下,由于船舶在區(qū)間內(nèi)運(yùn)動(dòng),A&R纜頂端張力與鋼懸鏈線立管彎矩始終在范圍內(nèi)波動(dòng),且船舶運(yùn)動(dòng)對(duì)A&R纜頂端張力與鋼懸鏈線立管彎矩幅值影響較大,對(duì)安裝作業(yè)安全風(fēng)險(xiǎn)評(píng)估有重要意義。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學(xué))(2019年10期)2020-01-18 09:16:22
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
故事大王(2016年7期)2016-09-22 17:30:08
兒童故事畫報(bào)(2013年3期)2013-06-24 05:40:30