空管自動化系統引接ADS-B信號后目標異常問題分析
2021-11-07 10:32:17胡今晶
科技信息·學術版 2021年22期
胡今晶

摘要:伴隨空管自動化行業的高速發展,S模式雷達、ADS-B等多種監視新技術廣泛應用,自動化系統已實現多監視源的融合,進而實現對單一目標位置的精確計算。因此,對多雷達融合機制的深入研究,有助于自動化系統運行維護人員快速分析日常運行問題。本文結合運行實際,闡述了對ADS-B原始數據中位置信息的解析以及西安區域管制中心所轄主備用自動化系統多雷達融合處理中航向數據的融合機制,希望對航跡融合問題的深入排查分析提供有力幫助。
關鍵詞:空管自動化系統;多雷達融合;航向融合;異常現象;監視數據;目標航向。
1 ADS-B系統原理
廣播式自動相關監視(ADS-B)是國際民航組織確定的未來主要監視技術。ADS-B 基于衛星定位和地/空數據鏈通信,提供了更加安全、高效的空中交通監視手段,能有效提高管制員和飛行員的運行態勢感知能力,擴大監視覆蓋范圍,提高空中交通安全水平、空域容量與運行效率。
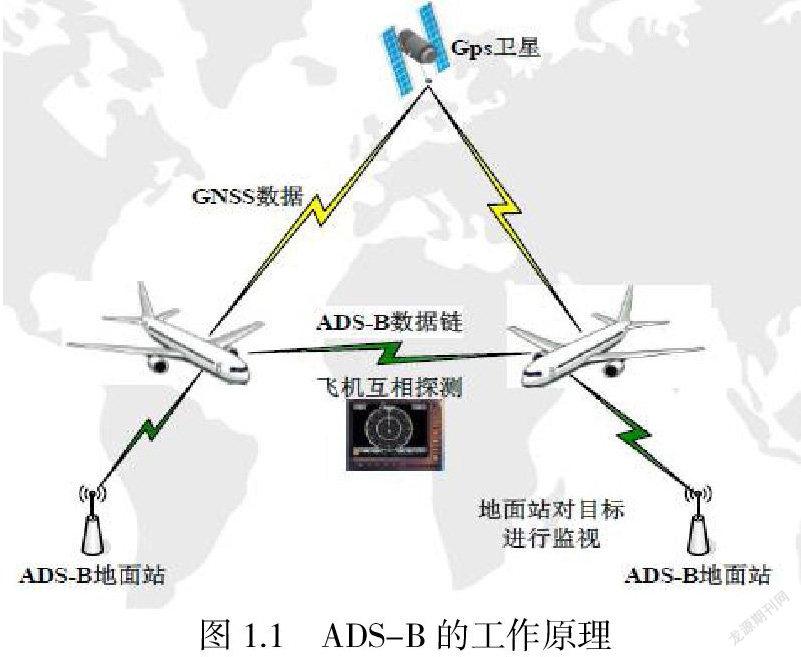
ADS-B的工作原理是通過機載系統導出飛機定位的四維位置信息(包括經度、緯度、高度和時間)以及其他的必要飛行參數,地面基站通過對接收的報文信息進行解析,并將位置和高度信息實時在監視器上顯示,從而實現對飛機動態的實時監視。它是集現代最先進的數據通信、衛星導航和監視技術千一體的新一代航行系統的先進技術,主要用于空中交通管理對航空器飛行動態的跟蹤監視,其工作原理如圖所示1.1所示。
ADS-B系統是一種雙向數據鏈的廣播監視系統,不僅用于空對地的下行通信鏈路,下傳飛機位置報告,而且也能實現飛行員同管制員之間直接雙向數據通信和上傳飛行報文信息。裝備 ADS-B設備的飛機,依靠機載導航設備全球導航衛星系統和其他機載信息源(如慣性導航系統等)獲取自身位置、速度等信息以及其他飛行所需信息,并通過數據鏈周期性地向周邊自動廣播出去,供外界對其進行監視。同時,該系統也能接收鄰近目標飛機的廣播信息,使得飛行員能更好地了解空中附近其他飛機的飛行動態,并自主地保持合適的安全間隔,能有效地保障飛機的飛行安全和防止目標飛機的非法入侵。
2 主備用自動化系統多雷達融合航向信息融合機制
空管自動化系統是以計算機為核心,實現對雷達、飛行計劃、氣象等信息的自動化處理系統。通過人機交互界面為管制員提供對整個管制區內飛行活動的監視、預測和告警信息,從而大大提高了空域的使用效率,增強了空中飛行的安全度,減輕了管制員的工作負荷。空管自動化系統的核心是多雷達航跡融合與飛行計劃處理。
西安區管主用INDRA自動化系統監視數據處理模塊設有MAIN組和FALLBACK組。其中每組配置兩臺RDCU服務器,用于進行監視數據前端處理,每臺RDCU負責處理一路監視原始數據;配置兩臺SDP,熱備份互為冗余。MAIN組采用卡爾曼濾波,FALLBACK組采用α-β濾波方法。
備用民航二所自動化系統監視數據處理模塊設有兩臺SDFP服務器,進行監視數據前端處理,兩臺MSDP服務器,進行監視數據融合處理,一臺BSDP服務器,進行監視數據旁路處理。民航二所自動化系統對各監視源接入的數據進行關聯處理,確定同一個航跡的所有數據源,并為它們分配相同的系統航跡號。相關條件為:相同應答機編碼、且距離、航向差、高度差、速度差均小于配置文件中的相關值。
民航二所自動化系統中,當一個目標可以被多部監視源探測到,該目標的位置由探測到它的多個監視數據共同確定。配置每部監視源在各個區域的靜態權重;另外,對單監視源目標進行濾波產生的協方差以及單雷達測試目標偏移量、通道延時可形成動態權重。結合靜態權重和動態權重,采用加權融合的方式來確定目標的準確位置。
西安區管主備用自動化系統航向融合模式為動態加權平均算法,即多部探測到該目標的雷達數據按照權重進行累加,最終得到融合航跡的航向數據。其中動態加權權重由雷達實時質量監控結果,對單雷達目標的跟蹤處理效果,以及單雷達信息與多雷達融合信息的比較結果所決定。
實時質量監控由監視數據前端處理模塊實現,主要包括通道狀態檢查、幀校驗、服務信息連續性檢驗、數據必備項檢查、測試目標驗證、數據項有效性驗證、航跡連續性檢驗。其中,對動態權重有貢獻的主要為通道狀態檢查和測試目標驗證。
自動化系統融合航跡的位置、航向等信息的刷新周期為4秒,當系統收到對于同一目標、相同雷達源的數據時,航向融合參考的數據源均為最新一個到達自動化系統的雷達數據包。
3 異常現象研究及分析
3.1 異常現象統計
2020年INDRA自動化系統接入ADS-B二級數據中心融合信號后,自動化系統SDD界面中,本場起飛航班偶有目標位置跳變等異常現象。截止2021年3月4日,問題統計如表1所示。
技術人員分別回放INDRA自動化系統和民航二所自動化系統錄像發現,目標位置跳變期間,可被本場雷神二次、INDRA二次、移動雷達和ADS-B信號多重覆蓋。目標跳變期間,二次雷達融合目標正常顯示在南跑道,ADS-B信號跳變至北跑道,進而造成北跑道落地航班出現錯相關等異常情況。
3.2 監視數據排查分析
西安區管INDRA自動化系統引接的雙路ADS-B信號在負四米機房網絡傳輸設備落地后,接入二層交換機,經二層交換機分路后分別傳輸至INDRA自動化系統四臺RDCU監視數據前端處理服務器。
參照ASTERIX數據協議標準,對發生航向漂移期間的雷神二次、INDRA二次和移動雷達的ASTERIX原始數據進行逐一分析,分析結果如下:
ADS-B二級數據中心數據分析:
通過對ADS-B二級數據中心錄像進行回放,回放發現問題航班在ADS-B二級數據中心的融合ADS-B目標位置自起飛后持續正常,沿南跑道正常飛行。隨后對ADS-B二級數據中心原始數據包進行詳細解析。
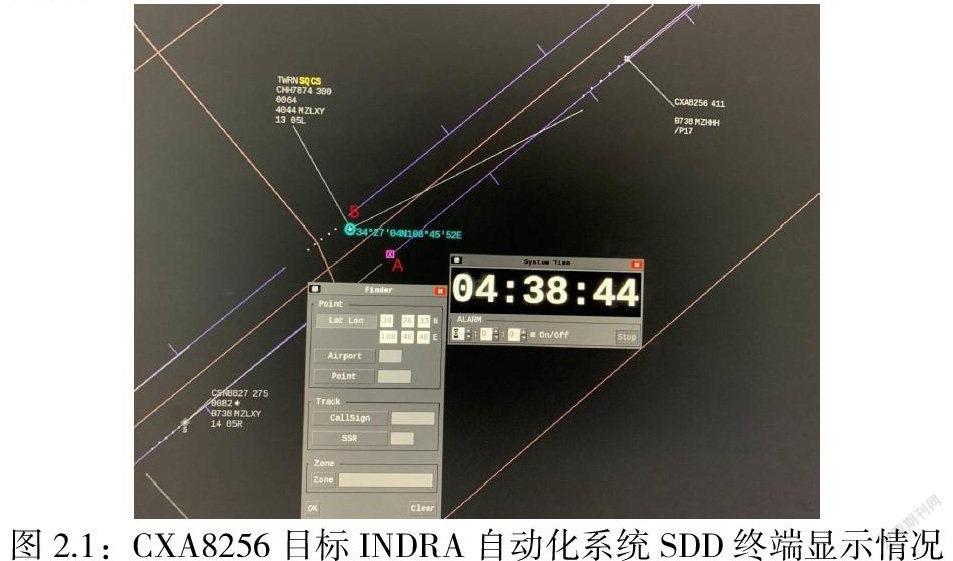
經過對ADS-B二級數據中心原始數據的分析及與INDRA自動化系統錄像對比,發現ADS-B二級數據中心輸出的ADS-B融合航跡在12:38:44時目標位置位于南跑道(如圖2中的位置A),而INDRA自動化系統SDD終端上該目標顯示在北跑道范圍內(如圖2.1中的位置B),初步分析ADS-B二級數據中心輸出的ADS-B融合航跡與INDRA自動化系統處理后的ADS-B融合航跡位置不一致[1]。
INDRA自動化系統數據分析:
為進一步確認目標位置跳變產生問題的故障節點,技術人員進行了INDRA自動化系統RDCU服務器錄像回放分析。經過回放發現RDCU錄像中位置跳變航班的ADS-B信號自南跑道起飛后,持續沿南跑道直線飛行進入一邊,未發生位置跳變現象,分析確認INDRA自動化系統引接的ADS-B融合信號正常,INDRA自動化系統RDCU服務器對ADS-B信號的前端預處理正常,初步判定目標位置跳變原因為INDRA自動化系統SDP服務器多雷達融合處理異常導致[1]。
民航二所自動化系統接收ADS-B原始數據包分析:
為進一步確認自動化系統引接的ADS-B數據狀態,技術人員選取2月23日個別ADS-B原始數據包進行解析,同時與民航二所自動化系統多雷達融合處理和顯示結果進行對比,分析結果如下:
1)本場離港航班第一個數據包
通過對比確認,ADS-B原始數據包中航班號、24位地址碼、二次代碼、目標飛行高度、速度、航向、位置信息與自動化系統SDD終端顯示均一致。
2)離港航班飛行高度3000米時的數據包
通過對比確認,ADS-B原始數據包中航班號、24位地址碼、二次代碼、目標飛行高度、速度、航向、位置信息與自動化系統SDD終端顯示均一致。
3)飛越航班飛行高度9000米時的數據包
通過對比確認,ADS-B原始數據包中航班號、24位地址碼、二次代碼、目標飛行高度、速度、航向、位置信息與自動化系統SDD終端顯示均一致。
4)本場進港航班最后一個數據包
通過對比確認,ADS-B原始數據包中航班號、24位地址碼、二次代碼、目標飛行高度、速度、航向、位置信息與自動化系統SDD終端顯示均一致[1]。
3.3 目標航向漂移原因分析及改進建議
3.3.1 原因分析
通過對各高度層、多種飛行姿態航班的ADS-B原始數據進行分析,發現ADS-B二級數據中心輸出至自動化系統的ADS-B原始數據中航班號、24位地址碼、二次代碼數據等目標識別信息與自動化系統處理結果一致,高度、速度、航向、NUC精度值等動態數據與自動化系統處理結果一致。
綜上,判定INDRA自動化系統ADS-B目標位置跳變是由于INDRA自動化系統中個別目標的多雷達航跡融合結果異常導致。
3.3.2 改進建議
1)廠家已提供新版本軟件,新版本軟件中已修復ADS-B信號引起的本場跑道范圍內目標異常問題,新版軟件發布后可解決該問題;
2)已于3月5日晚在ADS-B二級數據中心設置ADS-B信號屏蔽區緩解該問題,至今再未發生ADS-B目標漂移的問題;
3)加強對INDRA自動化系統ADS-B信號的狀態監控和巡視,發現異常情況及時進行處置。
4 結束語
通過對自動化系統監視數據前端處理、融合處理以及對雷達原始數據的深入分析,可實現對空管日常運行中出現的目標異常問題(目標丟失、目標分裂、假目標、航向跳變、高度跳變等)的快速定位,豐富問題排查方法。同時,可通過對問題的精確定位,促進各運行單位有效管控運行隱患,避免對管制運行安全造成影響。
未來,伴隨ADS-B、S模式雷達的廣泛應用,技術人員可通過對監視原始數據的解析,全面掌握監視數據源和機載設備間的雙向交互信息,進而為管制用戶提供更加高效可靠的監視數據保障手段。
參考文獻:
[1]西安區域管制中心AirNet空管自動化備份系統技術手冊