基于嵌入式的智能礦燈設計
2021-11-07 10:32:17王凱陳賀杜開宸車秀媛孟樂錦
科技信息·學術版 2021年22期
關鍵詞:嵌入式
王凱 陳賀 杜開宸 車秀媛 孟樂錦
摘要:本文針對地下礦道內危險發生或即將發生時,如何預警、緊急避難以及被困自救,設計了一種基于嵌入式的智能礦燈,該礦燈以STM32為核心控制器,利用GPRS、H2S、CO傳感器等模塊采集地下人員和環境信息,通過數據傳輸模塊將數據上傳至地面控制中心,進行分析與處理。
關鍵詞:嵌入式;智能礦燈;氣體檢測;坍塌監測
引言
礦燈的好壞影響著井下礦工的安全與效益[1]。如今部分礦井開采深度和范圍都在逐步擴大,但有的礦燈功能單一,報警方式一般采用傳統的聲音報警,但作業人員很難聽到報警聲音,從而錯過撤離的最佳時機。
本文設計的智能礦燈除了基本的照明功能外,還具有H2S、CO檢測超限報警、坍塌預警、被困定位、信息交流等功能。通過自動組網將井下人員位置信息以及危險氣體檢測等信息傳輸至地面,可以利用多功能礦燈提高煤礦安全生產和防災救援能力。
1 系統硬件設計
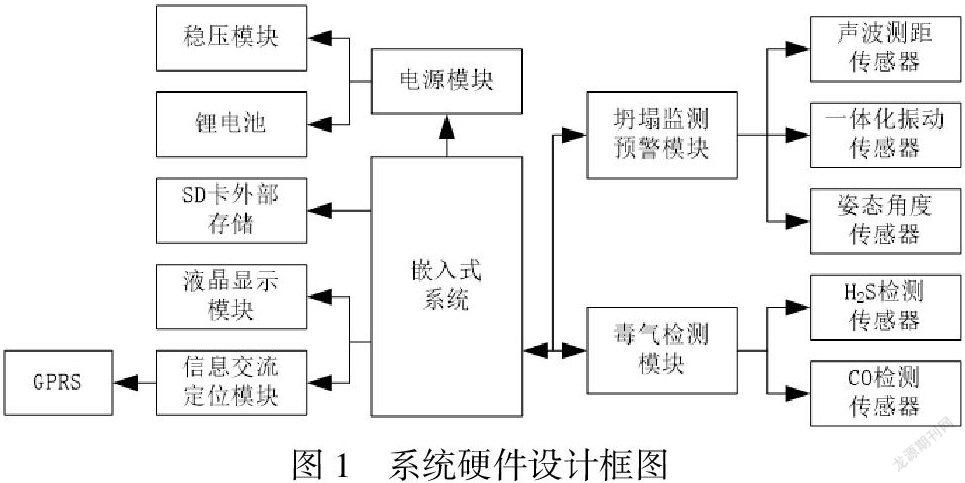
礦燈系統主要硬件和軟件兩大部分組成。硬件部分主要包括H2S檢測模塊、CO檢測模塊、坍塌檢測預警模塊、信息交流定位模塊等,如圖1所示。
1.1 H2S檢測模塊
H2S氣體檢測原理的核心部件是催化燃燒式高溫傳感器,工作原理是氣敏材料在通電狀態下,可燃性氣體氧化燃燒,電熱絲升溫,使其電阻值發生變化。
1.2 CO檢測模塊
CO氣體傳感器,是以定電位電解為基本原理,當CO擴散到氣體傳感器時,輸出端產生電流輸出給報警器中的采樣電路,當氣體濃度發生變化時,傳感器的輸出電流成正比,經報警器的中間電路轉換放大輸出,以驅動不同的裝置。
1.3 坍塌監測預警模塊
本模塊通過一體化振動傳感器、姿態角度傳感器和聲波測距傳感器,分別檢測燈身的抖動、轉過的角度以及對地高度。以三組監測數據對坍塌等級進行綜合評定,當三者之中任意一組、任意二組或三組監測數值超過閾值,則分別定為初級、中級、高級警告。一旦礦燈發出警告,立即將監測信息傳輸至地面控制中心;同時反饋給礦道內所有礦燈,為礦工提供實時信息。
1.4 信息交流定位模塊
通過毒氣檢測模塊、坍塌監測預警模塊等獲得地下礦道內人員與環境信息后,通過Zigbee模塊進行數據的傳輸,并自動組網,將該信息與嵌入式系統做出的實時反饋信息發送至地面控制中心[2,3]。
礦燈進行定距離安裝,然后通過GPRS模塊對每一個礦燈進行初始定位;當監測到坍塌時,報警點兩側礦燈將信息上傳至地面控制中心進行分析與處理。
2 系統軟件設計
該部分主要包括主程序、初始化、數據采集處理、液晶顯示、聲波通信及定位等子程序。下面主要介紹主程序和UWB+GPRS子程序。
2.1主程序設計
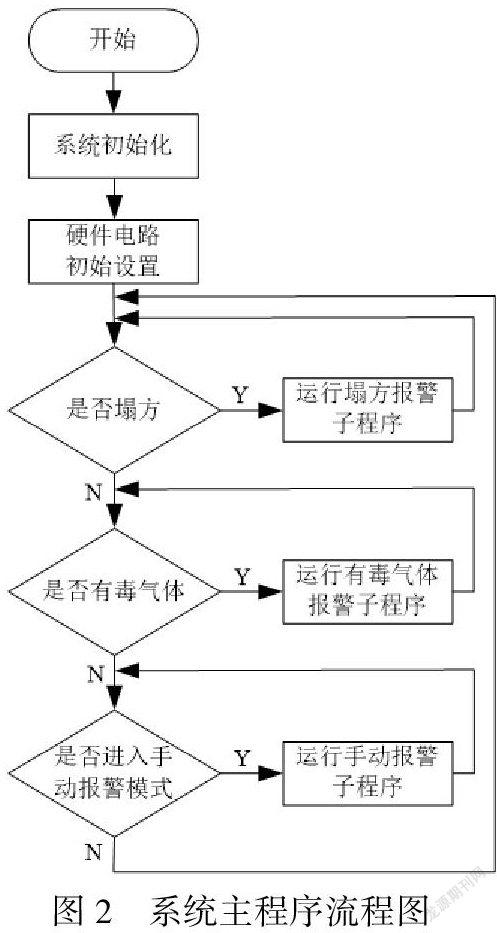
主程序流程圖如下圖2所示,首先是進行系統初始化,開始硬件電路初始設置,采集地下環境信息,把采集到的數據進行分析與顯示;緊接著判斷是否坍塌,若塌方則運行塌方報警子程序觸發裝置進行報警;然后判斷毒氣濃度是否超過規定的闕值,若超限則運行有毒氣體報警子程序觸發裝置進行報警;緊接著判斷是否進入手動報警模式,若為否則重新進行數據分析。
2.2 UWB+GPRS子程序設計
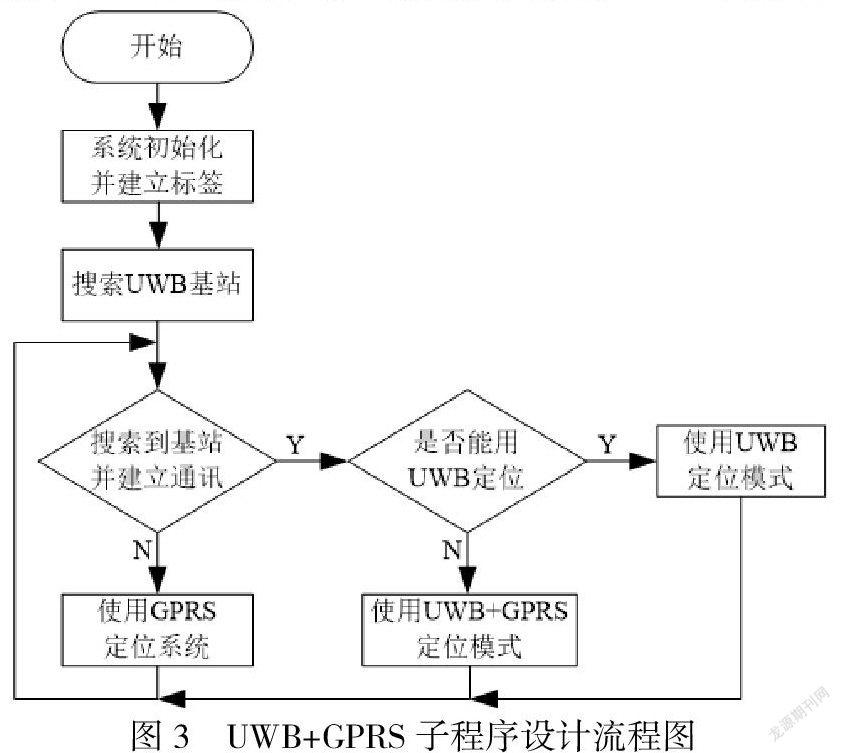
UWB+GPRS子程序流程設計如圖3所示,首先系統初始化并建立標簽,搜索UWB基站,若搜索到基站并成功建立通訊,則判斷是否能用UWB定位模式定位,若可以則使用UWB定位模式,如不能則使用UWB+GPRS定位模式;若搜不到基站或無法有效通訊,則使用GPRS定位模式,之后跳回到搜索UWB基站步驟[4]。
3 實驗測試
3.1測試結果
在12V、9600mA·h鋰電池供電下,經實測,LED燈頭的平均輸出電流為300mA,H2S氣體傳感器和CO氣體傳感器平均供電電流分別為180mA和200mA,超聲波測距模塊平均供電電流為15mA。同時濾波角度傳感器和Zigbee傳感器監測正常,新型礦燈與上位機系統數據雙向通信正常,詳細測試數據如下。
(1)采用不同體積分數H2S氣體的測試組數為五組,H2S體積分數/%分別為:0.5、1.0、1.5、2.0、2.5;檢測數據/%為:0.52、1.06、1.53、2.07、2.55;得出誤差/%分別為0.02、0.06、0.03、0.07、0.05。同樣可測出CO檢測結果亦在誤差允許的范圍內。
(2)T=25℃時傾角傳感器的測試數據為五組,Y軸基準值/°分別為:-3、0、3、6、9;Y軸測量值/°分別為-2.992、0.011、2.983、5.985、8.991;得出誤差/°分別為:0.008、0.011、0.017、0.015、0.009。
(3)T=25℃時聲波測距模塊對地高度精度測試組數為六組,對地實際值/cm分別為:60、90、120、150、180、210;測量值分別為61、91.3、121、151、180.2、210.1;得出誤差百分比分別為:1.7%、1.4%、0.8%、0.7%、0.1%、0.05%。
(4)人員定位信息測試組數為五組,實際位置/m分別為100、200、300、400、500;系統定位/m結果分別:101、201.5、301.8、401.5、502.1;得出誤差百分比分別為:1%、0.75%、0.6%、0.375%、4.2%。
通過實驗測試結果與實際數值對比可知,誤差均在允許范圍內,各項預期功能都可實現。
4 結語
本文設計了一種基于嵌入式的新型智能礦燈,經過多次實驗、調試,該礦燈滿足設計要求,具有功能多、測量精度高、響應速度快、定位準確、安全可靠、性能穩定等優點。
參考文獻
[1]臧財運.新型多功能礦燈的探討[J].煤礦機電,2003(05):64-66.
[2]劉江霞,武強,范寶德. 基于ZigBee的智能瓦斯報警礦燈設計[J]. 工礦自動化,2013(12):13-17.
[3]王克權,仲從建,滕道祥等.基于礦燈的自動組網無線預警系統[J].山東工業技術,2014(7):126+132.
[4]朱廣. 基于人員定位及瓦斯監測的智能礦燈設計[J].機械工程師,2013(05):79-81.
作者簡介:王凱2000.09湖北荊州 男 本科在讀 漢族 長春工程學院 電氣工程及其自動化 國家級大學生創新創業訓練計劃項目“基于嵌入式的新型智能礦燈的研制”項目編號:202111437010
猜你喜歡
家庭影院技術(2021年7期)2021-08-14 02:58:44
電子制作(2019年7期)2019-04-25 13:17:14
成都信息工程大學學報(2018年4期)2019-01-23 06:57:18
電子制作(2018年18期)2018-11-14 01:48:16
電子制作(2018年16期)2018-09-26 03:27:18
鐵道通信信號(2018年2期)2018-04-18 12:18:23
制造技術與機床(2017年3期)2017-06-23 08:11:50
電子制作(2017年8期)2017-06-05 09:36:15
電鍍與環保(2016年3期)2017-01-20 08:15:32
單片機與嵌入式系統應用(2014年9期)2014-03-11 15:35:13