基于LSTM 模型的飛行器智能制導(dǎo)技術(shù)研究
2021-11-09 06:26:56惠俊鵬俞啟東李天任
力學(xué)學(xué)報 2021年7期
關(guān)鍵詞:模型
汪 韌 惠俊鵬 俞啟東 李天任 楊 奔
(中國運載火箭技術(shù)研究院研究發(fā)展部,北京 100076)
引言
高升阻比飛行器具有飛行速度快、升阻比高、航程遠(yuǎn)、機(jī)動突防能力強(qiáng)等特點,在軍事和民用領(lǐng)域發(fā)揮著重要的作用.高升阻比飛行器再入制導(dǎo)技術(shù)是通過設(shè)計制導(dǎo)律,在動力學(xué)方程、過程約束、控制量約束等條件下,使得飛行器在中末交班點滿足再入終端約束.因臨近空間環(huán)境的復(fù)雜性和不確定性,飛行器再入制導(dǎo)技術(shù)已成為航空航天領(lǐng)域研究的熱點之一[1].
高升阻比飛行器再入制導(dǎo)方法主要分為兩種:基于標(biāo)稱軌跡的制導(dǎo)方法和預(yù)測校正制導(dǎo)[2-3].基于標(biāo)稱軌跡的制導(dǎo)方法離線設(shè)計標(biāo)稱軌跡,在飛行過程中跟蹤標(biāo)稱軌跡進(jìn)行制導(dǎo).離線設(shè)計的標(biāo)稱軌跡可以是阻力加速度?速度剖面、高度?速度剖面等.由于標(biāo)稱軌跡是離線設(shè)計所得,因而該方法對復(fù)雜環(huán)境的適應(yīng)性和魯棒性方面存在明顯的不足.預(yù)測校正制導(dǎo)方法基于當(dāng)前飛行狀態(tài),對動力學(xué)方程進(jìn)行積分預(yù)測飛行器的終端狀態(tài),并基于終端狀態(tài)與目標(biāo)點的偏差來校正制導(dǎo)指令,從而實現(xiàn)對飛行器的精確制導(dǎo).相比于基于標(biāo)稱軌跡跟蹤的制導(dǎo)方法,預(yù)測校正制導(dǎo)具有更強(qiáng)的自主性和對復(fù)雜環(huán)境的適應(yīng)能力.
近年來,人工智能(artificial intelligence)技術(shù)的突破性發(fā)展為飛行器再入制導(dǎo)技術(shù)的研究提供了新的技術(shù)途徑,已成為學(xué)術(shù)界和工業(yè)界的研究熱點.人工智能的核心目標(biāo)是讓機(jī)器在復(fù)雜、不確定、多變化場景下具備類似于人類的感知、決策和行動等能力.機(jī)器學(xué)習(xí)(machine learning)技術(shù)是支撐人工智能發(fā)展的核心技術(shù),機(jī)器學(xué)習(xí)主要包括監(jiān)督學(xué)習(xí)(supervised learning)、無監(jiān)督學(xué)習(xí)(unsupervised learning)和強(qiáng)化學(xué)習(xí)(reinforcement learning).尤其是以深度學(xué)習(xí)[4]和強(qiáng)化學(xué)習(xí)[5]為代表的智能技術(shù),包括經(jīng)典的深度學(xué)習(xí)模型如AlexNet[6],VGG[7],ResNet[8],SSD[9],YOLO v4[10]等,以及經(jīng)典的強(qiáng)化學(xué)習(xí)算法如DQN[11],DDPG[12],PPO[13],SAC[14]等,其具備網(wǎng)絡(luò)映射能力強(qiáng)、學(xué)習(xí)速率快、在與環(huán)境交互“試錯”中學(xué)習(xí)等能力,已經(jīng)廣泛應(yīng)用于目標(biāo)檢測與識別、自然語言處理、文本處理、智能機(jī)器人等領(lǐng)域,其表現(xiàn)出的卓越性能已經(jīng)超出人類的想象.
基于人工智能的飛行器制導(dǎo)控制技術(shù)研究尚處于起步階段.程林等[15]綜述了深度學(xué)習(xí)在飛行器動力學(xué)與控制中的應(yīng)用,從3 個方面總結(jié)了深度學(xué)習(xí)在飛行器動力學(xué)與控制中的應(yīng)用,包括:在動力學(xué)建模中應(yīng)用深度學(xué)習(xí)來提升模型計算效率和建模精度、求解模型反問題;在最優(yōu)控制中應(yīng)用深度學(xué)習(xí)來提升軌跡規(guī)劃速度、最優(yōu)控制實時性和自主性;在飛行器任務(wù)設(shè)計中應(yīng)用深度學(xué)習(xí)來提升任務(wù)優(yōu)化的計算效率和決策水平.在制導(dǎo)律設(shè)計方面,文獻(xiàn)[16-18]將深度學(xué)習(xí)技術(shù)應(yīng)用于飛行器制導(dǎo)和在線軌跡優(yōu)化問題,基于大量的飛行軌跡訓(xùn)練神經(jīng)網(wǎng)絡(luò)模型,從而實現(xiàn)飛行器實時狀態(tài)到制導(dǎo)指令的快速映射;文獻(xiàn)[19-24]研究了基于Q-Learning、PPO等強(qiáng)化學(xué)習(xí)算法的智能制導(dǎo)律,該方法消除了傳統(tǒng)制導(dǎo)律對飛行器附加的一些不必要約束,通過飛行器與環(huán)境的大量交互和試錯,并基于獎勵信息來學(xué)習(xí)制導(dǎo)律,使得飛行器初步具備了自主決策能力.在姿態(tài)控制方面,文獻(xiàn)[25-26]在傳統(tǒng)PID 控制的基礎(chǔ)上,進(jìn)一步利用強(qiáng)化學(xué)習(xí)技術(shù)實現(xiàn)對飛行器六自由度的穩(wěn)定控制,并驗證了該方法在控制精度和實時性方面的優(yōu)勢.在飛行器協(xié)同制導(dǎo)與軌跡規(guī)劃方面,方科等[27]開展了高升阻比飛行器時間協(xié)同再入制導(dǎo)研究,將協(xié)同再入制導(dǎo)結(jié)構(gòu)分為兩層,其中底層提出了基于神經(jīng)網(wǎng)絡(luò)的時間可控再入制導(dǎo)律,以再入飛行時間的可知性與可控性為實現(xiàn)目標(biāo);上層根據(jù)不同再入階段特點設(shè)計相應(yīng)的協(xié)調(diào)函數(shù),生成時間協(xié)調(diào)信息.周宏宇等[28]提出了一種改進(jìn)粒子群優(yōu)化(PSO)算法的飛行器協(xié)同軌跡規(guī)劃,并借助強(qiáng)化學(xué)習(xí)方法構(gòu)建協(xié)同需求與慣性權(quán)重間的動態(tài)映射網(wǎng)絡(luò),提高在線軌跡規(guī)劃效率.
本文首先針對預(yù)測校正制導(dǎo)算法進(jìn)行深入地分析,其存在兩方面的不足,一是由于對預(yù)測校正制導(dǎo)的實時性要求很高,因此在縱向制導(dǎo)中每隔固定的周期(一般為50 s,20 s 等量級)預(yù)測飛行器的待飛射程并校正一次傾側(cè)角的幅值,而在橫向制導(dǎo)中,需要時刻(一般每隔0.1 s)判斷橫程誤差或航向角與視線角的誤差是否超出走廊邊界.因而,對于傾側(cè)角這一控制量來說,存在兩個制導(dǎo)周期,其幅值的制導(dǎo)周期是其符號制導(dǎo)周期的上百倍,存在明顯的不匹配.二是,預(yù)測校正制導(dǎo)需分別在縱向和橫向制導(dǎo)中對動力學(xué)方程進(jìn)行兩次積分,縱向制導(dǎo)中的積分預(yù)測飛行器的待飛射程,橫向制導(dǎo)中的積分確定飛行狀態(tài),進(jìn)而確定傾側(cè)角的符號,兩次積分過程存在明顯的冗余計算,所需要的制導(dǎo)指令解算時間較長.
針對上述預(yù)測校正制導(dǎo)中存在的不足,本文提出基于長短期記憶網(wǎng)絡(luò)(long short-term memory,LSTM)[29]模型的飛行器再入制導(dǎo),其核心思想:一是不再通過對動力學(xué)方程進(jìn)行積分來預(yù)測飛行器的待飛射程和基于割線法校正傾側(cè)角的幅值;二是將預(yù)測校正中“縱向制導(dǎo)確定傾側(cè)角的幅值”和“橫向制導(dǎo)確定傾側(cè)角的符號反轉(zhuǎn)”兩個過程相融合,即去除“預(yù)測”環(huán)節(jié)、“校正”環(huán)節(jié).利用深度學(xué)習(xí)在神經(jīng)網(wǎng)絡(luò)映射能力和實時性方面的天然優(yōu)勢,基于飛行器再入段的實時狀態(tài)信息,采用LSTM 模型實時生成傾側(cè)角,包括其幅值和符號.傾側(cè)角的制導(dǎo)將只有一個周期,從而進(jìn)一步確保制導(dǎo)系統(tǒng)滿足在線制導(dǎo)實時性的要求.選取LSTM 模型的根本原因在于飛行器的傾側(cè)角決策過程是一個典型的序貫決策過程.這是因為在傳統(tǒng)的預(yù)測校正制導(dǎo)中每一時刻的傾側(cè)角符號不僅取決于當(dāng)前時刻的狀態(tài),還與上一時刻的傾側(cè)角符號以及上一時刻航向角誤差與走廊的關(guān)系有關(guān).因而,飛行器傾側(cè)角的確定不僅需要基于當(dāng)前時刻的狀態(tài)信息還需要歷史時刻的狀態(tài)信息.從智能決策的角度來說,在決策傾側(cè)角時需考慮飛行器在相鄰時刻的狀態(tài)關(guān)系,而LSTM 是解決序貫決策問題的經(jīng)典模型.
本文圍繞基于LSTM 模型的飛行器再入制導(dǎo)開展研究,首先在第1 章描述了飛行器再入制導(dǎo)問題,包括再入飛行器運動模型以及再入制導(dǎo)的約束;第2 章研究了預(yù)測校正制導(dǎo),包括傾側(cè)角幅值的求解、傾側(cè)角幅值的約束以及傾側(cè)角符號的設(shè)計;第3 章深入研究基于LSTM 模型的再入飛行器制導(dǎo)律設(shè)計,詳細(xì)描述了模型的架構(gòu)和設(shè)計;在第4 章的仿真中,給出了LSTM 模型的訓(xùn)練、測試、蒙特·卡羅仿真分析和實時性分析.
1 飛行器再入制導(dǎo)問題
1.1 再入飛行器運動模型
再入飛行器三自由度動力學(xué)方程如下
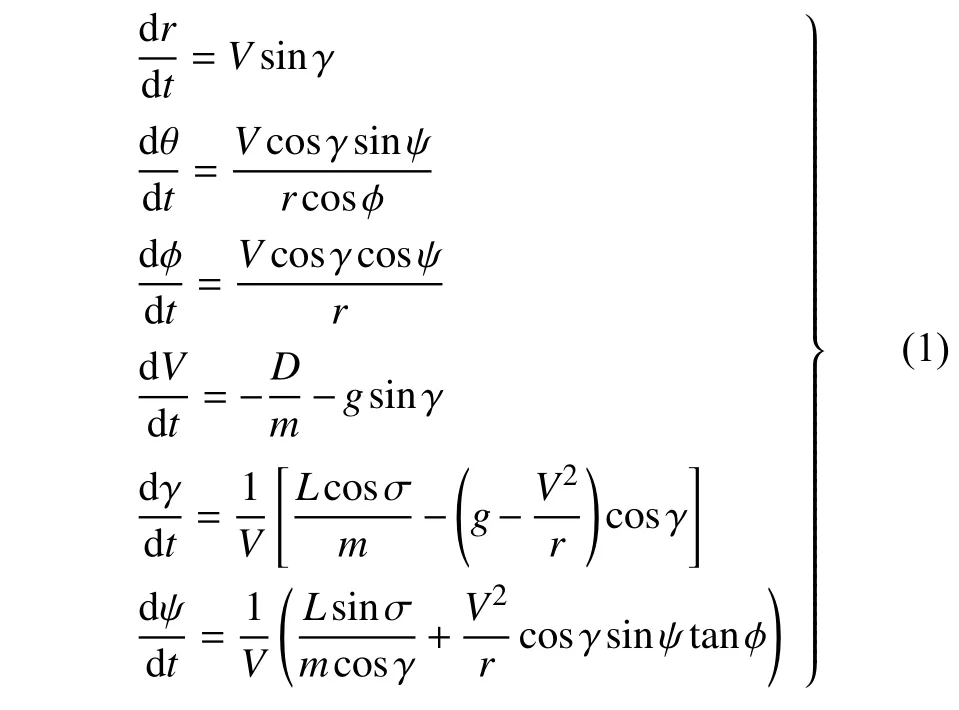
其中,r為地心距,θ 和 φ 分別表示飛行器的經(jīng)緯度,V為飛行速度,γ 和 ψ 分別表示飛行器的航跡角和航向角,σ 表示傾側(cè)角,m為飛行器的質(zhì)量,g為重力加速度,L和D分別表示飛行器受到的升力和阻力.升力L和阻力D的計算公式為
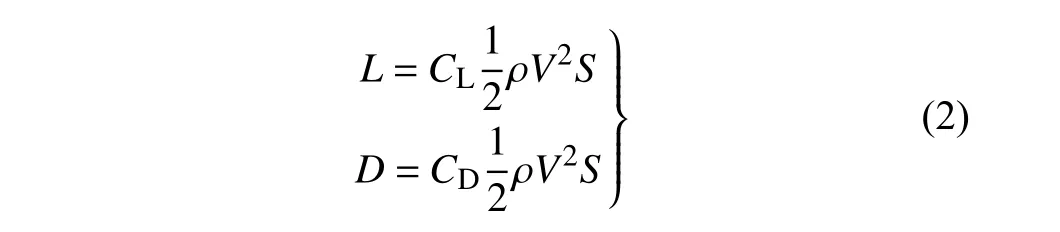
式中,ρ=ρ0e?βH為飛行器所在高度的大氣密度,ρ0為海平面大氣密度,β=1/HMCP,HMCP=7.11 km 為基準(zhǔn)高度;S為特征面積;CL和CD分別為升力系數(shù)和阻力系數(shù),一般為飛行器攻角 α和速度V的函數(shù),具體視不同的飛行器而定.再入飛行器的狀態(tài)量sss=[r,θ,φ,V,γ,ψ]T,控制量uuu=[α,σ]T.
1.2 再入制導(dǎo)約束
為了保證再入飛行器成功地完成飛行任務(wù),飛行器需滿足各種條件約束,其中核心的約束條件包括再入過程約束、終端約束和傾側(cè)角控制約束.
1.2.1 硬約束
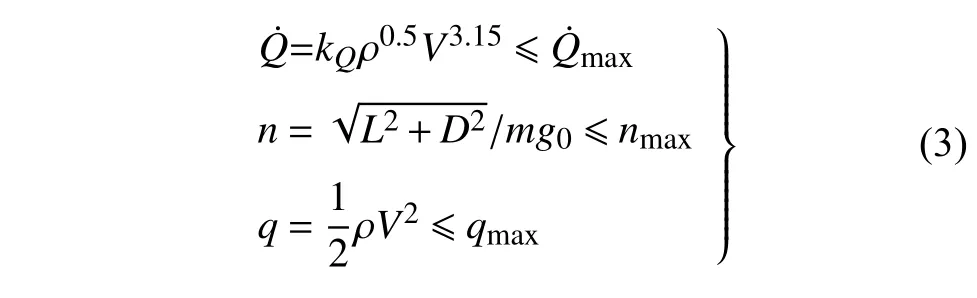
飛行器再入過程中高超聲速氣流會產(chǎn)生嚴(yán)重的氣動熱,尤其是飛行器的駐點區(qū)域.為保證飛行器各個部件正常運行,再入段制導(dǎo)必須考慮駐點區(qū)的熱流率約束.其次,飛行器機(jī)身和機(jī)翼結(jié)構(gòu)強(qiáng)度的上限以及氣動舵面鉸支鏈的承受能力,決定了再入飛行過程中的最大允許過載和動壓.熱流率約束、過載約束和動壓約束是飛行器再入飛行中必須要滿足的“硬約束”條件.其表達(dá)式為
1.2.2 軟約束
相比于上述的“硬約束”,擬平衡滑翔條件(qusiequilibrium glide condition,QEGC)是飛行器再入制導(dǎo)的一種“軟約束”,即保證飛行器不再跳出大氣層.擬平衡滑翔條件是令三自由度動力學(xué)方程中航跡角γ及其導(dǎo)數(shù) γ˙ 同時為零,即

當(dāng)滿足擬平衡滑翔條件時,飛行器所受重力與升力的合力恰好與其所受的向心力平衡,此時飛行軌跡高度變化較小,航跡角保持很小的量.
1.2.3 再入終端約束
再入段的終端約束為中末交班點參數(shù),再入終端約束一般包括高度、速度、經(jīng)緯度等約束,可表示為

式中,tf表示中末交班時刻,rf,Vf,θf,φf分別為交班時刻的地心距、速度、經(jīng)度和緯度.
1.2.4 控制量約束
在三自由度飛行器再入制導(dǎo)中,攻角 α 和傾側(cè)角 σ 為控制量,由于飛行器內(nèi)部控制機(jī)構(gòu)的作用,控制量的變化需要一定的變化時間和變化速度,不能瞬間變化到指定值.由于攻角采用標(biāo)準(zhǔn)攻角剖面,因而控制量的約束主要限制在傾側(cè)角的幅值及其變化率上,即

式中,σmax和表示傾側(cè)角的幅值和變化率的上界.
2 再入飛行器預(yù)測校正制導(dǎo)
在再入飛行器制導(dǎo)中,控制量包括攻角 α 和傾側(cè)角 σ.在縱向制導(dǎo)中,設(shè)計攻角 α 和傾側(cè)角的幅值|σ|,在側(cè)向制導(dǎo)中,設(shè)計傾側(cè)角 σ 的符號.
2.1 攻角剖面
攻角 α 一般通過預(yù)先設(shè)定的速度?攻角剖面生成.在再入初期為滿足熱流率約束采用大攻角飛行,在中后段為滿足飛行器的射程需求,采用最大升阻比對應(yīng)的攻角飛行.本文采用的攻角剖面為
式中,V0,Vf分別為初始、末端速度;V1,V2為可調(diào)的速度參數(shù); αmax,αmaxL/D分別為最大攻角和最大升阻比對應(yīng)的攻角.
2.2 傾側(cè)角幅值求解
傾側(cè)角 σ 需通過縱向制導(dǎo)和橫向制導(dǎo)兩個步驟來確定.在彈道坐標(biāo)系中,氣動力的投影為

由上式可以看出,在攻角剖面確定的情況下,再入飛行器的縱向制導(dǎo)只與傾側(cè)角 σ 的幅值有關(guān),與其正負(fù)號無關(guān),傾側(cè)角 σ 的正負(fù)號需通過橫向制導(dǎo)律來確定,這也可以從式(1)的三自由度動力學(xué)方程中得出相同的結(jié)論.
由再入飛行器運動學(xué)模型可知,在一個縱向預(yù)測校正周期內(nèi),飛行器以當(dāng)前的傾側(cè)角 σ 為控制量,通過對動力學(xué)方程積分,得到滿足終端能量約束的縱平面射程S(σ),射程S(σ) 關(guān)于時間的導(dǎo)數(shù)為

式中,R0為地球半徑.另一方面,飛行器距離中末制導(dǎo)交班點的剩余射程為

縱平面內(nèi)預(yù)測校正制導(dǎo)的目標(biāo)是使得飛行器將要飛出的射程S(σ)與剩余射程Ltogo相等,即

式中,σopt為待求解的傾側(cè)角.S(σ) 通過對式(9)數(shù)值積分得到,因此需采用迭代算法求得上述方程的解,一般采用割線法(secant method)

2.3 傾側(cè)角幅值約束
飛行器在再入段必須滿足式(3)的“硬約束”條件,按照式(12)迭代求解出的傾側(cè)角幅值一般難以滿足過程約束,需對傾側(cè)角幅值加以約束.將式(2)代入式(3)的約束條件得到在高度?速度(H-V)剖面再入走廊的下邊界
式中,HQ˙max(V),Hnmax(V)和Hqmax(V) 分別為熱流率、過載和動壓約束下飛行器高度的下界.
然而,在再入飛行過程中,如果時時刻刻判斷高度?速度剖面是否滿足再入走廊的邊界約束會帶來巨大的計算量,為此將上述再入走廊的約束直接轉(zhuǎn)化為對傾側(cè)角幅值的約束

為進(jìn)一步抑制再入飛行軌跡的振蕩,尤其是要確保再入后第一個波谷處滿足熱流率的約束,在上述傾側(cè)角約束的基礎(chǔ)上增加高度變化率的反饋控制,其目的是為了根據(jù)飛行器高度的變化自動調(diào)節(jié)傾側(cè)角的幅值,進(jìn)而實現(xiàn)升力在負(fù)重力方向的投影Lcosσ能更好地滿足式(4)中的擬平衡滑翔條件,具體為

2.4 傾側(cè)角符號設(shè)計
傾側(cè)角符號的設(shè)計需通過預(yù)測校正橫向制導(dǎo)來完成,傾側(cè)角符號的設(shè)計又包含兩個方面,即橫向控制量和控制量走廊,當(dāng)橫向控制量到達(dá)走廊邊界時,傾側(cè)角符號反轉(zhuǎn).橫向控制量可以是橫程誤差或航向角與視線角誤差,通過設(shè)置合適的橫程誤差或航向角與視線角誤差走廊來進(jìn)行橫向制導(dǎo),本文選取第二種橫向控制量.
飛行器與目標(biāo)點的視線角可通過球面三角形求得,其表達(dá)式為

則飛行器航向角與視線角的偏差為

橫向制導(dǎo)律為當(dāng)航向角與視線角誤差超過走廊邊界時,傾側(cè)角反轉(zhuǎn),即

通過控制傾側(cè)角符號的反轉(zhuǎn)來使得飛行器滿足再入終端的經(jīng)緯度約束.
3 基于LSTM 模型的飛行器再入制導(dǎo)律設(shè)計
3.1 解決的問題
在傳統(tǒng)的預(yù)測校正制導(dǎo)中,傾側(cè)角的幅值一般基于預(yù)測的待飛射程與剩余射程的差,采用割線法迭代求解傾側(cè)角的幅值.由于對預(yù)測校正制導(dǎo)的實時性要求很高,所以在縱向制導(dǎo)中每隔固定的周期(一般為50 s,20 s 等量級)校正一次傾側(cè)角的幅值.而在橫向制導(dǎo)中,需要時刻判斷航向角與視線角的誤差是否超出走廊邊界,一般每隔0.1 s 甚至更小的周期判斷一次,一旦超出走廊則傾側(cè)角的符號反轉(zhuǎn).因而,對于傾側(cè)角這一控制量來說,其幅值的制導(dǎo)周期是其符號制導(dǎo)周期的上百倍,存在明顯的不匹配.此外,由圖1(a)可以看出,預(yù)測校正制導(dǎo)每確定一次傾側(cè)角,需分別在縱向制導(dǎo)和橫向制導(dǎo)中對動力學(xué)方程進(jìn)行兩次積分,縱向制導(dǎo)中的積分預(yù)測飛行器的待飛射程,橫向制導(dǎo)中的積分是為了確定飛行狀態(tài),進(jìn)而確定傾側(cè)角的符號,兩次積分過程存在明顯的冗余計算.
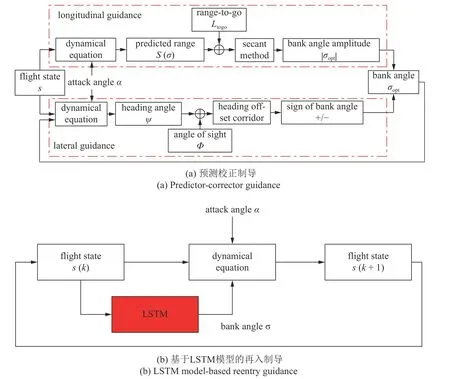
圖1 預(yù)測校正制導(dǎo)與基于LSTM 模型的再入制導(dǎo)對比Fig.1 Comparison of predictor-corrector guidance and LSTM model-based reentry guidance
針對上述預(yù)測校正制導(dǎo)中存在的不足,本文研究基于LSTM 模型的飛行器再入制導(dǎo),如圖1(b)所示,其核心思想為:一是不再通過對動力學(xué)方程進(jìn)行積分來預(yù)測飛行器的待飛射程和基于割線法校正傾側(cè)角的幅值,二是將預(yù)測校正中“縱向制導(dǎo)確定傾側(cè)角的幅值”和“橫向制導(dǎo)確定傾側(cè)角的符號反轉(zhuǎn)”兩個過程相融合,即去除“預(yù)測”環(huán)節(jié)、“校正”環(huán)節(jié),基于飛行器再入段的實時狀態(tài)信息,利用LSTM 模型實時生成傾側(cè)角,包括其幅值和符號.
具體為:一方面,輸入t0時刻的飛行器狀態(tài),基于LSTM 模型輸出傾側(cè)角,本文中制導(dǎo)周期設(shè)置為1s,即下一次在t0+1 時刻更新傾側(cè)角;另一方面,在t0到t0+1這一時間段內(nèi),將t0時刻輸出的傾側(cè)角帶入動力學(xué)方程(1)進(jìn)行積分,動力學(xué)方程積分步長為0.1s,進(jìn)而得到 [t0,t0+1]時間段內(nèi)t0,t0+0.1,t0+0.2,···,t0+1 各時刻的飛行狀態(tài).以此類推,在t0+1時刻,基于LSTM 模型輸出新的傾側(cè)角,在t0+1到t0+2這一時間段內(nèi),再將t0+1 時刻輸出的傾側(cè)角代入動力學(xué)方程進(jìn)行積分,進(jìn)而得到[t0+1,t0+2]時間段內(nèi)的飛行狀態(tài).
該方法的優(yōu)越性具體體現(xiàn)在以下幾個方面:
(1)在計算速度方面,傳統(tǒng)預(yù)測校正制導(dǎo)中大量的計算集中在“預(yù)測”環(huán)節(jié)和“校正”環(huán)節(jié),基于LSTM 模型的飛行器再入制導(dǎo),一方面不再需要縱向制導(dǎo)中對動力學(xué)方程的積分來預(yù)測待飛射程,即去除“預(yù)測”過程,大大減小計算量,提高計算速度;另一方面,不再基于割線法迭代求解傾側(cè)角的幅值,即沒有了傾側(cè)角的“校正”過程,訓(xùn)練完成的LSTM模型具備天然的計算速度快的優(yōu)勢,模型的輸入為飛行器實時的狀態(tài)信息,將傾側(cè)角的幅值和符號一并輸出.
(2)在傾側(cè)角的制導(dǎo)周期方面,不存在幅值校正周期和符號反轉(zhuǎn)兩個周期,對傾側(cè)角的制導(dǎo)將只有一個周期,該周期的大小介于幅值的制導(dǎo)周期和符號的制導(dǎo)周期中間,從而進(jìn)一步確保制導(dǎo)系統(tǒng)滿足在線制導(dǎo)實時性的要求.
3.2 基于LSTM 模型的傾側(cè)角設(shè)計
基于LSTM 模型實時輸出飛行器的傾側(cè)角,網(wǎng)絡(luò)模型的結(jié)構(gòu)如圖2 所示.其中,網(wǎng)絡(luò)的輸入為飛行器的實時狀態(tài)向量,本文定義狀態(tài)向量為
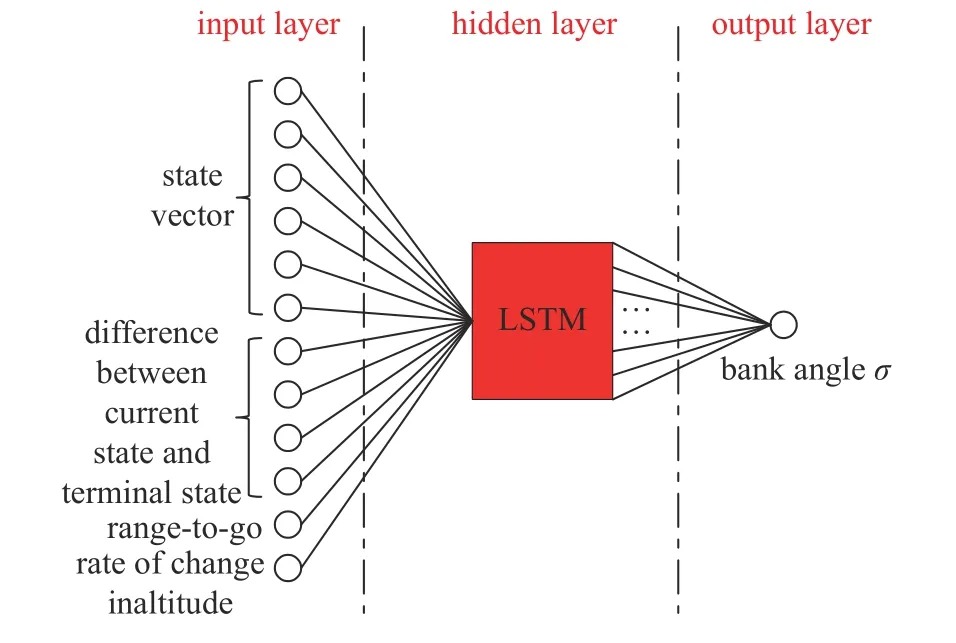
圖2 基于LSTM 的神經(jīng)網(wǎng)絡(luò)模型架構(gòu)Fig.2 Structure diagram of LSTM-based neural network

式中,Δr=r?rf,Δθ=θ ?θf,Δφ=φ?φf,ΔV=V?Vf.隱層為LSTM 模型,其具體結(jié)構(gòu)如圖3 所示,隱層輸出的節(jié)點數(shù)為64 個,隱層到輸出層是全連接,輸出為傾側(cè)角 σ.
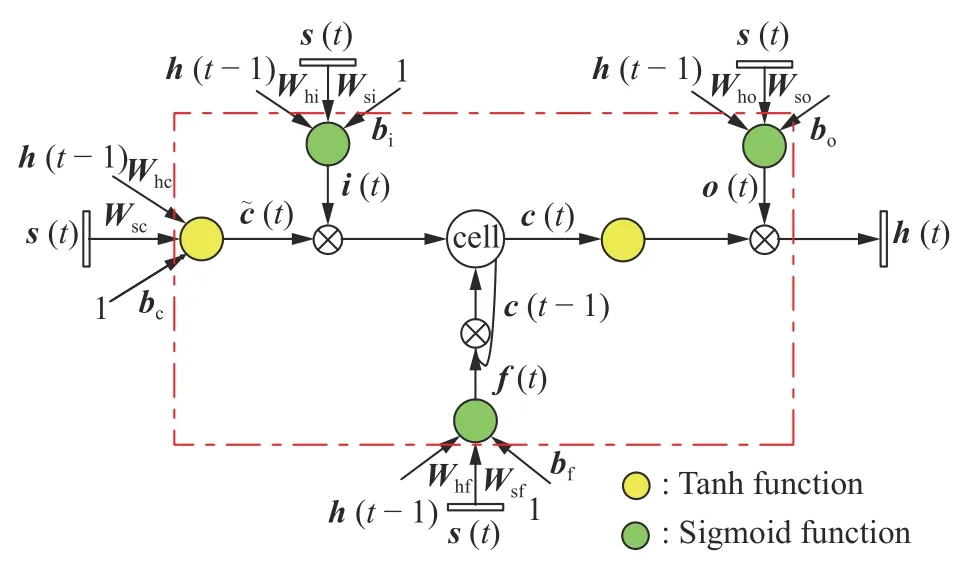
圖3 LSTM 模型Fig.3 LSTM model
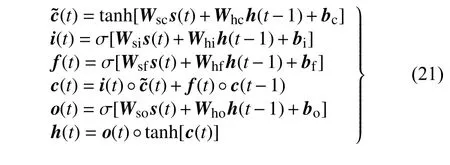
LSTM 模型的表達(dá)式為
4 仿真與分析
4.1 LSTM 網(wǎng)絡(luò)模型的訓(xùn)練
LSTM 模型的訓(xùn)練分兩步,一是訓(xùn)練樣本的生成,二是網(wǎng)絡(luò)模型的訓(xùn)練.
4.1.1 訓(xùn)練樣本的生成
在訓(xùn)練樣本的生成方面,本文選取美國通用航空飛行器CAV-H 為研究對象,基于傳統(tǒng)預(yù)測校正制導(dǎo)產(chǎn)生仿真數(shù)據(jù),參數(shù)設(shè)置如下.
(1) 飛行器參數(shù):質(zhì)量m=907.20 kg,參考面積S=0.4839 m2,過程約束中為最大允許熱流率=2000 kw/m2,最大允許過載nmax=3g,最大允許動壓qmax=100 kPa.

(2)升力系數(shù)CL和阻力系數(shù)CD與攻角 α 和速度V的函數(shù)關(guān)系為其中,CL0=?0.2355,CL1=2.9451,CL2=0.2949,CL3=?3.3943×10?4;CD0=0.0234,CD1=2.3795,CD2=0.3983,CD3=?1.0794×10?3.
(3)中末交班點參數(shù):高度hf=23 km,經(jīng)度θf=50°,緯度φf=3°,速度Vf=1100 m/s.
(4)攻角剖面:最大攻角 αmax=20°,最大升阻比對應(yīng)的攻角 αmaxL/D=10°,式(7)中可調(diào)的速度參數(shù)V1=5000 m/s,V2=2500 m/s.
(5) 縱向預(yù)測校正的周期:當(dāng)剩余射程大于500 km 時,T=50 s;當(dāng)剩余射程小于500 km,大于200 km 時,T=15 s;當(dāng)剩余射程小于200 km 時,T=5 s.
(6)動力學(xué)方程積分步長:縱向制導(dǎo)的積分步長為1 s,橫向制導(dǎo)的積分步長為0.1 s.
(7)飛行器再入初始點的狀態(tài)參數(shù)見表1.
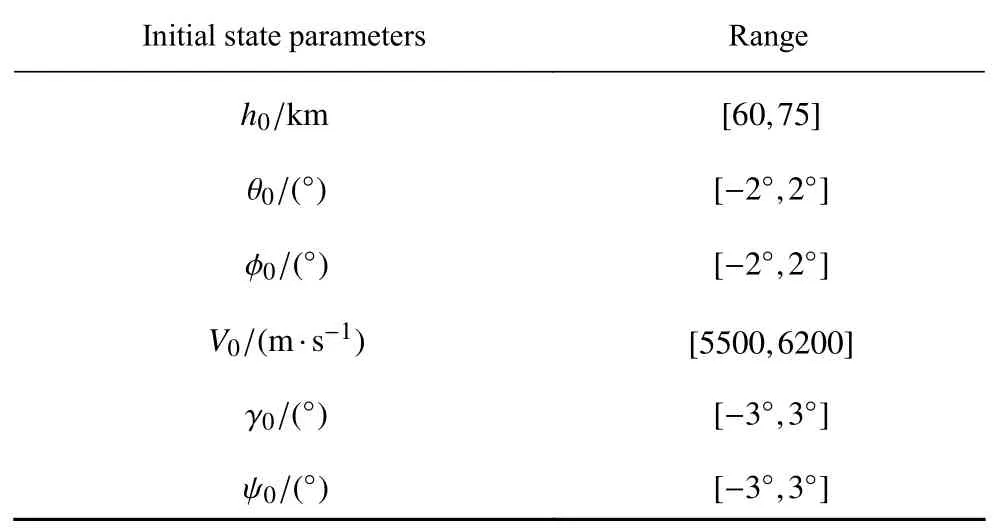
表1 飛行器再入初始點的參數(shù)范圍Table 1 Range of initial state parameters
在上述參數(shù)范圍內(nèi)隨機(jī)設(shè)置飛行器的再入初始點參數(shù),在預(yù)測校正制導(dǎo)下可以獲得大量的飛行軌跡數(shù)據(jù).本文選取其中1331 條飛行軌跡,每條軌跡約16 000 個樣本點.
4.1.2 模型的訓(xùn)練
將1331 條飛行軌跡數(shù)據(jù)輸入圖2 的基于LSTM的飛行器傾側(cè)角設(shè)計模型中,在訓(xùn)練時目標(biāo)損失函數(shù)(loss function)定義為

其中,S表示軌跡的數(shù)目,R表示每一條軌跡的樣本點數(shù).采用SGDM (stochastic gradient descent with momentum) 算法[30],模型中參數(shù)的初始化采用Xavier 方法[31].學(xué)習(xí)率設(shè)置為1.0×10?3,批處理時“batchsize”設(shè)置為50,最大迭代次數(shù)(epoch)設(shè)置為1000.除了采用損失函數(shù)描述訓(xùn)練效果外,還采用均方根誤差(root mean square error,RMSE)作為定量評價指標(biāo),其定義為

訓(xùn)練效果如圖4 和圖5 所示.
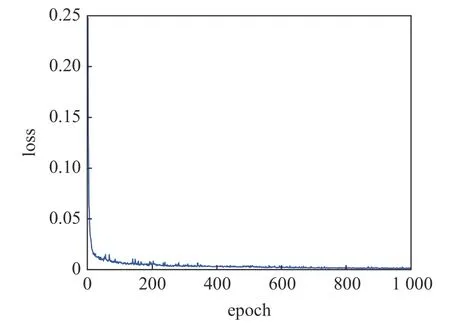
圖4 損失函數(shù)隨迭代次數(shù)的變化曲線Fig.4 Loss function-epoch curve
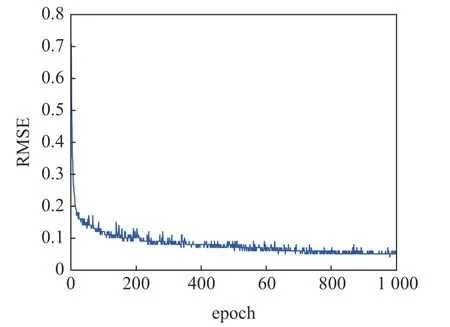
圖5 均方根誤差隨迭代次數(shù)的變化曲線Fig.5 RMSE-epoch curve
由圖可以看出目標(biāo)損失函數(shù)和均方根誤差隨著訓(xùn)練迭代次數(shù)的增加逐漸減小且趨于收斂,表明上述訓(xùn)練參數(shù)設(shè)置的合理性.
4.2 LSTM 網(wǎng)絡(luò)模型的測試
基于上述訓(xùn)練的LSTM 模型進(jìn)行飛行器再入制導(dǎo)仿真,并與預(yù)測校正制導(dǎo)進(jìn)行對比,如圖6~ 圖10所示.
由圖6~ 圖10 可以看出,兩種制導(dǎo)方式下的曲線基本重合,基于訓(xùn)練的LSTM 制導(dǎo)模型,使得飛行器在滿足熱流率約束、過載約束和動壓約束的前提下,能夠安全可靠地完成既定的飛行任務(wù).
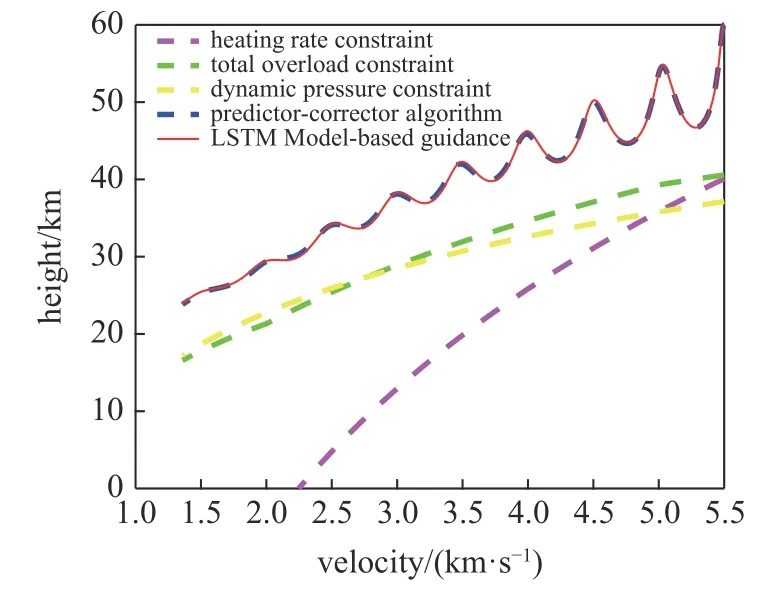
圖6 高度?速度曲線對比Fig.6 Comparison of height-velocity curve
4.3 蒙特·卡羅仿真分析
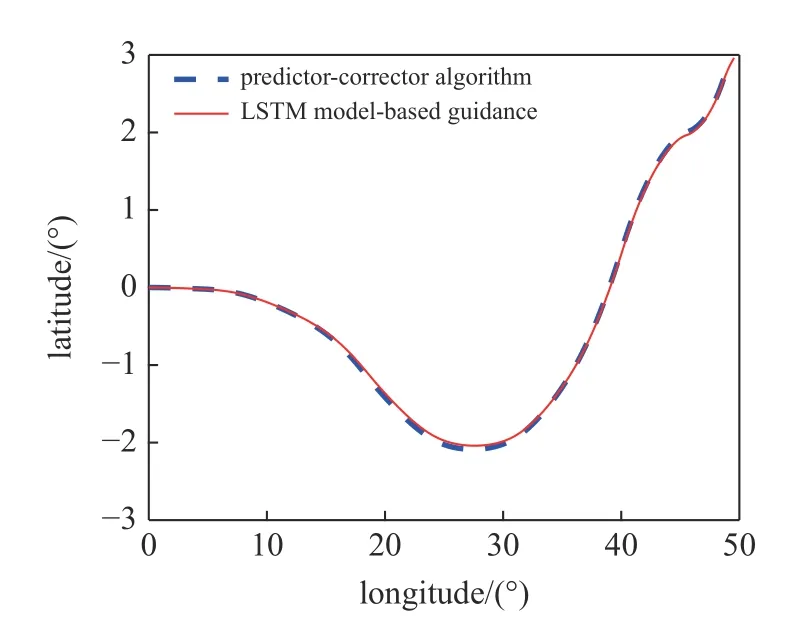
圖7 橫向軌跡曲線對比Fig.7 Comparison of horizontal trajectory curve
為驗證基于LSTM 模型的飛行器再入制導(dǎo)的魯棒性和對參數(shù)偏差的適應(yīng)性,本文對飛行器再入初始狀態(tài)、氣動參數(shù)進(jìn)行拉偏仿真分析,飛行器再入初始狀態(tài)和氣動參數(shù)偏差見表2.
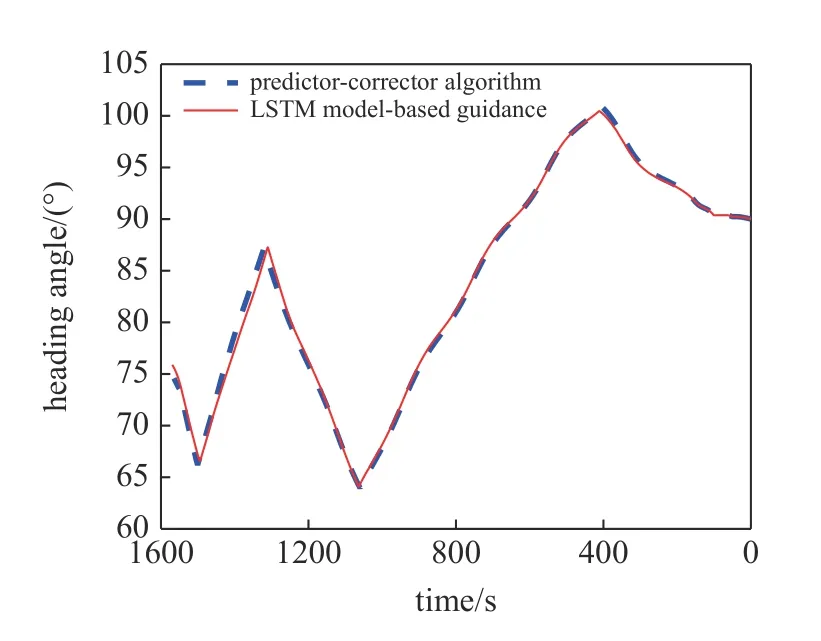
圖10 航向角?時間曲線對比Fig.10 Comparison of heading angle-time curve
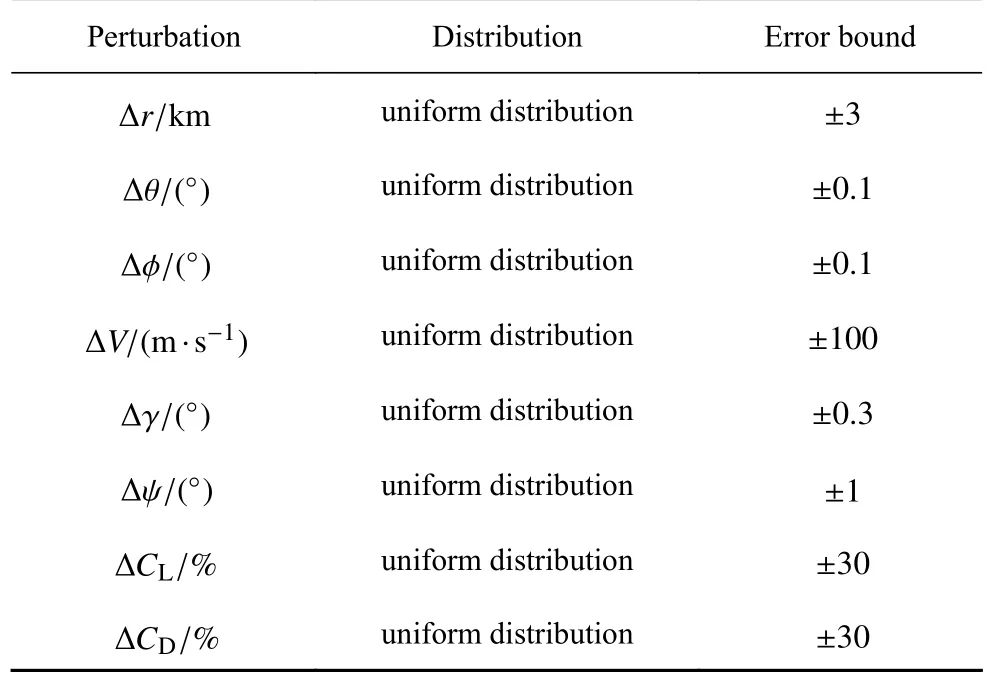
表2 飛行器再入初始狀態(tài)和氣動參數(shù)偏差Table 2 Initial state error and aerodynamic parameter perturbation
在再入初始狀態(tài)擾動和氣動偏差的條件下,利用訓(xùn)練的LSTM 模型進(jìn)行400 組的蒙特·卡羅仿真,落點經(jīng)緯度的散布圖如圖11 所示,并與傳統(tǒng)的預(yù)測校正制導(dǎo)進(jìn)行比較.由圖11 可以看出,在滿足中末交班點能量約束的前提下,相比于傳統(tǒng)的預(yù)測校正制導(dǎo)方法,基于LSTM 的飛行器再入制導(dǎo)的末端狀態(tài)更加靠近中末交班點,即更加靠近 θf=50°,φf=3°點.顯然,在初始狀態(tài)有擾動和氣動參數(shù)有偏差的情形下,基于LSTM 模型的再入制導(dǎo)方法具有更高的精度,其原因在于采用LSTM 模型輸出傾側(cè)角指令時需對輸入的飛行器狀態(tài)向量進(jìn)行歸一化處理,該過程會降低對狀態(tài)偏差的敏感性,加上LSTM 神經(jīng)網(wǎng)絡(luò)模型具有天然的泛化能力,因而對于參數(shù)的偏差具有更強(qiáng)的魯棒性.
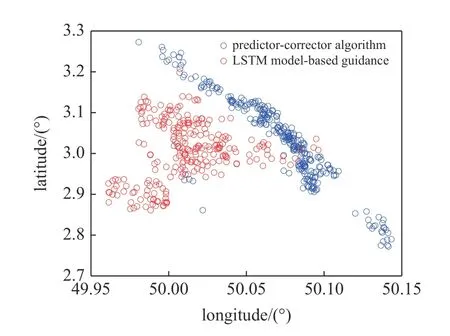
圖11 初始狀態(tài)和氣動參數(shù)擾動下落點經(jīng)緯度的散布圖Fig.11 Scatter diagram of longitude and latitude under initial state error and aerodynamic parameter perturbation
4.4 實時性分析
本節(jié)進(jìn)一步分析基于LSTM 模型的飛行器再入制導(dǎo)在實時性方面的性能.
在蒙特·卡羅仿真中,基于LSTM 的制導(dǎo)模型完成一次再入段飛行的平均時長為10.18 s,其具體分布如圖12 所示,其中基于LSTM 模型生成傾側(cè)角的時長占其中的7.30 s,龍哥庫塔RK-4 積分時長占其中的2.63 s.
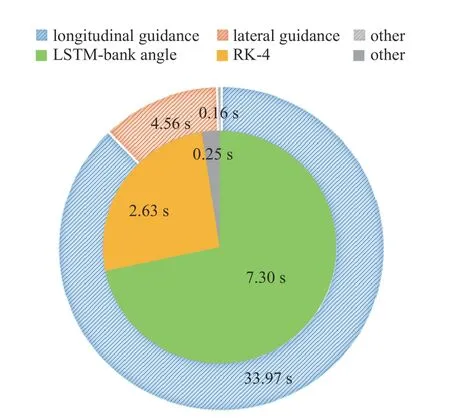
圖12 計算實時性對比分析Fig.12 Comparison of computing time analysis
與之對比,預(yù)測校正制導(dǎo)在蒙特·卡羅仿真中完成一次再入段飛行的平均時長為38.69 s,其中縱向制導(dǎo)過程占其中的33.97 s,橫向制導(dǎo)過程占其中的4.56 s.這是因為在縱向制導(dǎo)中,對動力學(xué)方程進(jìn)行積分的預(yù)測過程和基于割線法求解傾側(cè)角的迭代過程計算量較大,占用的時間較長.而基于LSTM 模型的飛行器再入制導(dǎo)中沒有“預(yù)測”環(huán)節(jié)和“積分”環(huán)節(jié),大大減少了計算量,提高了計算速度.因而,在實時性方面,基于LSTM 模型的飛行器再入制導(dǎo)相比于傳統(tǒng)預(yù)測校正制導(dǎo)具有明顯的優(yōu)勢.
5 結(jié)論
本文針對傳統(tǒng)預(yù)測校正制導(dǎo)中存在的兩方面問題,一是縱向預(yù)測中積分計算量大、割線法迭代求解傾側(cè)角幅值難以滿足實時性的問題,二是縱向制導(dǎo)和橫向制導(dǎo)中都需要對動力學(xué)方程進(jìn)行積分,存在明顯的冗余計算問題,提出基于LSTM 模型的飛行器智能制導(dǎo)技術(shù),并基于飛行器的實時狀態(tài)信息輸出傾側(cè)角指令.該方法的優(yōu)勢體現(xiàn)在兩個方面,一方面不再需要縱向制導(dǎo)中對動力學(xué)方程的積分來預(yù)測待飛射程,即去除“預(yù)測”過程,大大減小計算量,提高計算速度;另一方面,不再基于割線法迭代求解傾側(cè)角的幅值,即去除傾側(cè)角的“校正”過程,訓(xùn)練完成的LSTM 模型具備天然的計算速度快的優(yōu)勢.此外,在傾側(cè)角的制導(dǎo)周期方面,不存在幅值校正周期和符號反轉(zhuǎn)兩個周期,傾側(cè)角的制導(dǎo)將只有一個周期,從而進(jìn)一步確保制導(dǎo)系統(tǒng)滿足在線制導(dǎo)實時性的要求.
盡管新興的人工智能技術(shù)具有非線性映射能力和實時性方面的天然優(yōu)勢,但目前的人工智能技術(shù)存在難以回避的缺點:一是,針對飛行器制導(dǎo)控制任務(wù),目前的深度學(xué)習(xí)是純數(shù)據(jù)驅(qū)動的模式,需要大量的樣本數(shù)據(jù)來訓(xùn)練神經(jīng)網(wǎng)絡(luò)模型,但在航天領(lǐng)域,真實的數(shù)據(jù)往往難以獲取,樣本數(shù)據(jù)不足時容易出現(xiàn)過擬合問題;二是,目前的人工智能仍然處于計算智能階段,神經(jīng)網(wǎng)絡(luò)模型只能在訓(xùn)練樣本數(shù)據(jù)集覆蓋的范圍內(nèi)有效,依然不具備較強(qiáng)的泛化能力,實際飛行中若出現(xiàn)數(shù)據(jù)集范圍外的情況,神經(jīng)網(wǎng)絡(luò)的性能將難以保證.制導(dǎo)控制技術(shù)與人工智能技術(shù)不是簡單的替代關(guān)系,制導(dǎo)控制技術(shù)可以在關(guān)鍵點上吸納人工智能技術(shù)在記憶、推理、擬合等方面的優(yōu)勢,兩個領(lǐng)域的交叉融合是飛行器智能制導(dǎo)控制領(lǐng)域的熱門研究方向.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19