無人機實時攝影測量關鍵技術研究
2021-11-11 02:54:56李永鵬吳永春楊軍義
甘肅科技 2021年18期
張 軍,李永鵬,申 靜,吳永春,楊軍義
(1 甘肅工業職業技術學院,甘肅 天水 741025;2 甘肅省測繪工程技術研究中心,甘肅 天水 741025;3 甘肅省地質礦產勘查開發局第一地質礦產勘察院,甘肅 天水 741025;4 江西省地質礦產勘查開發局贛西地質調查大隊,江西 南昌 330002)
近年來無人機技術逐漸成熟,帶動攝影測量取得了突飛猛進的發展,無人機攝影測量應運而生。無人機攝影測量飛速發展取得了突破性成就,對測繪地理信息行業發展做出了巨大貢獻。然而,該技術今后的發展方向在哪里也是眾多學者爭相研究的重要課題。目前無人機攝影測量技術的發展依賴無人機、傳感器、GNSS 技術及相關數據解算技術的發展,這些技術的都是圍繞如何快速準確的獲取影像數據,并高效便捷地進行高精度數據解算來展開的。然而通過分析攝影測量技術發展歷程可見,攝影測量技術始終都分內外業兩個過程,如何打破傳統技術理念,實現內外業一體化,使攝影測量更加方便、快捷、智能化,無人機實時攝影測量就是發展方向。
1 無人機實時攝影測量解決方案
無人機實時攝影測量的發展目標是將無人機數據采集、數據預處理及數據解算過程高度集成,通過內外業一體化實現實時獲取測繪成果的目的,這就需要從數據采集、數據傳輸、數據處理等方面進行系統的設計并解決一些技術瓶頸問題。從數據處理的角度分析,實時攝影測量可以有3 種方案。一是將數據處理模塊內嵌到無人機系統,此方案的優勢在于影像數據不需要傳輸,只傳輸壓縮后的成果數據,因成果數據較小,所以數據傳輸負擔較小,系統設計的重點在無人機系統上,要求無人機系統在進行飛控的同時還需承擔數據解算的功能,在此情況下無人機系統的負擔就會過大,基于目前的技術手段此種方案不易實現;二是基于地面站實時數據處理獲取產品,此方案設計對無人機的圖傳系統要求很高,同時從數據解算的角度來分析,解算方法要進行優化,傳統的航攝數據整體處理技術不能滿足實時變化數據解算的要求,需要從實時數據更新的角度重新設計數據解算算法,且此方案對地面站數據處理設備的要求較高,以上兩點問題從技術層面來分析都可實現,小范圍信息獲取對設備要求不高的情況下,這種方案是可行的;三是基于“云”計算的實時數據處理方案,基于“云”計算進行影像數據實時處理的優勢在于數據解算的速度會大大增加,可以處理海量數據,存在的問題是對數據傳輸的要求很高,但在5G 技術成熟的情況下,此方法無疑是最佳方案。
2 無人機實時攝影測量發展關鍵技術
通過分析基于地面站或“云”計算的實時攝影測量技術是可行的,在進行技術創新過程中,需要解決以下幾個關鍵問題。
2.1 無人機實時攝影測量對傳感器的要求
航攝影像在進行數據解算時需要進行影像畸變誤差的改正,這需要耗費數據解算的時間成本。影像畸變誤差是由傳感器自身成像特點及加工工藝等因素引起,傳統航攝相機采用球面鏡片,球面鏡片由于像差的存在,導致攝影光線不能很好地匯聚,影像模糊度較大、影像畸變較大且存在邊緣色差,這些問題會降低數據處理的準確度,同時增加數據處理時間復雜度。無人機攝影測量技術要滿足實時測繪的要求,較小數據解算速度是核心問題之一,因此,減少影像畸變增加的解算時間成本,是實時攝影測量技術發展的要求。從目前航攝傳感器發展現狀來看,配備ED(超低色散能力)非球面鏡片的傳感器能較好地適應實時攝影測量的基本要求。
2.2 基于5G 網聯無人機的實時攝影測量
一般無人機以點對點的方式與地面站進行通信,通過Wi-Fi 或藍牙作為通訊手段,通訊內容包含三個方面:圖傳、數傳、遙控,其中圖傳對無人機通信方式要求最高。以Wi-Fi 為例,雖然圖傳速度達到了1080p(分辨率1920×1080),能夠滿足小像幅影像圖傳基本要求(達不到全畫幅影像實時圖傳要求),但是通信質量、速度和距離受環境影響很大,一般在300~500m 的視距范圍以內(特定條件限制下,才可以達到1km 以上)才能保障正常通信[1],這些問題都嚴重制約實時攝影測量技術實施應用。如果用網聯無人機,基于4G LTE 蜂窩通信技術,網絡基站覆蓋到位的情況下,理論上通信不受距離限制,但圖傳能力只能達到720p(分辨率1280×720)左右,可見基于4G 的網絡無人機也滿足不了實時攝影測量的通信要求。
5G 技術的產生,使實時攝影測量成為可能,首先從通訊距離看來,網絡無人機可以不受距離限制實現實時通信,其次5G 技術的理論帶寬可達20Gbps 以上,已建實驗網絡也普遍達到了1Gbps 的通信速率,一般無人機影像不會超過1Gbps[2]。可見基于5G 的網絡無人機可以實時與地面站或者“云”端數據解算系統實現高速通訊,為實時攝影測量的實現提供了通訊保障。
2.3 基于“云”計算的數據實時處理關鍵技術
1)技術方案。從數據解算的角度分析,實時攝影測量需要解決兩方面的問題,一是從環境的角度出發提高數據解算速度,二是改善數據解算算法。實時攝影測量,需要超強設備的數據解算能力,依靠“云”計算,代替傳統工作站數據解算的模式,完全滿足數據解算在速度方面的要求,是實時攝影測量得以實現的又一保障。如圖1 所示,基于5G 及“云”計算的數據實時處理的技術方案。
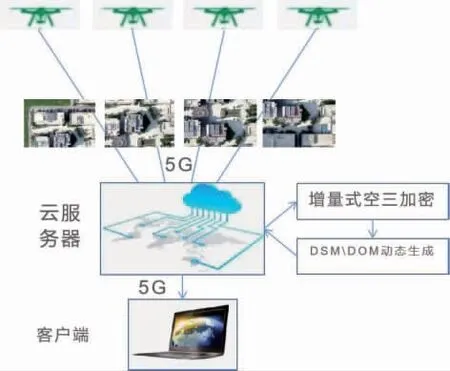
圖1 實時攝影測量技術方案
2)增量式空三加密。攝影測量數據解算包含空三、DSM 及DOM 的生成,從這兩個方面對傳統攝影測量數據解算方法進行改進,使其滿足實時攝影測量要求。傳統空三采用控制點區域網平差來獲取高精度加密點云成果,要實現實時空三就需要改變傳統空三解算的思路。第一,實時攝影測量要求逐影像快速匹配加密點,在影像數據不多的前提下,基于網絡“云”計算,影像匹配算法效率影響很小,可選擇成熟穩定、匹配精度高的SIFT 算法;第二,參考同步定位和地圖構建(simultaneous localization and mapping,SLAM)的思想,基于空間前方交會及光束法平差(bundle adjustment,BA)提出增量式光束法平差的加密方案。如圖2 所示增量式光束法平差方案。
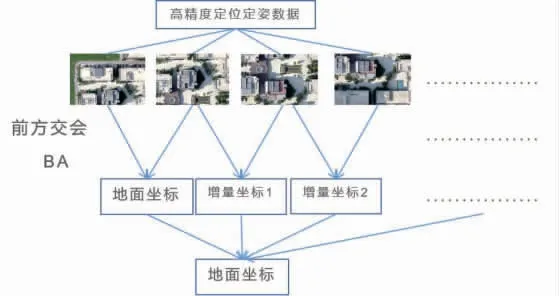
圖2 增量式光束法平差方案
SLAM 是在沒有預知地圖信息的條件下進行動態特征提取、數據解算、數據狀態檢查、數據更新定位自身和對周圍環境建圖的方法[3],增量式空三加密就是借鑒SLAM 的思路,利用基于共線方程的空間前方交會法及BA 相結合,得到漸變式加密成果,其中共線方程是前方交會及BA 的核心方程式,如公式(1)共線方程。增量式空三加密基本流程如下:一是以高精度POS 獲取的外方位元素進行單模型定向,前方交會計算加密點坐標;二是以加密點坐標為初始值通過BA 進行加密點優化;三是加密點逐相對拼接。增量式空三加密前提是無人機需要配備高精度定位定姿設備,在影像采集的同時獲取影像高精度外方位元素,外方位元素已知的前提下才可以直接利用基于共線條件方程的空間前方交會法獲取地面點坐標。

公式(1)中包含像點坐標x、y,地面點坐標XA、YA、ZA,影像主距f 及外方位元素XS、YS、ZS、Φ、ω、K(a1、a2、a3、b1.......)。
3)基于Delaunay 三角網動態更新算法構建動態DSM。實時攝影測量需要通過動態空三加密成果進行三角網 (Delaunay Triangulation Irregular Network,D-TIN)的動態更新,制定三角網頂點動態插入、調整和刪除策略,才可以及時內插出DSM 并糾正影像獲取DOM 成果,達到實時攝影測量的目的。從20 世紀80 年代開始,國內外學者已經展開了D-TIN 更新算法的研究,為了增加D-TIN 的現勢性,90 年代初國內外學者又展開了大量有關DTIN 動態更新算法的研究[4]。動態D-TIN 算法要通過實時空三加密點對D-TIN 進行動態更新,后內插出DSM,這個過程中D-TIN 是末端實時更新,所以要等D-TIN 模型趨于穩定后再內插DSM,由于滯后速度很短,對實時DSM 生成是沒有影響的[5-7]。動態D-TIN 構建核心是點及約束線的動態更新,點動態更新要點包括點的定位、點的位置判斷、點的刪除,在此基礎上進行約束線的重構。D-TIN 生成算法研究相對成熟,動態更新算法研究越來越受到人們的重視,基于現代信息獲取實時性的要求,D-TIN 局部快速更新已成為了眾多學者研究的熱點。目前由于“云”計算的優勢,動態D-TIN 更新算法是滿足實時攝影測量速度要求的[8-9]。
4)實時攝影測量產品輸出形式。實時攝影測量概念的提出最大的優勢在于數據獲取的時效性要求很高,時效性對各類應急應用是非常關鍵的。從產品形式分析,攝影測量基礎產品包含DSM、DOM 及實景三維模型,由于建模需要消耗較多的時間,所以實景三維模型目前暫不建議作為實時攝影測量的產品。DSM 及DOM 是基于高程及平面的獨立產品,為了方便實時應用,將兩者融合構建影像高程同步模型(OESM),基于OESM測圖可獲得與立體測圖一致的精度,測圖精度可靠[10],可以方便用戶通過統一數據進行信息提取、分析、應用。
3 結論
在結合分析當前無人機攝影測量技術發展現狀的基礎上,研究實時攝影測量技術發展過程中的關鍵問題,提出實時攝影測量各技術環節在設備、算法、產品等方面的建設意見,并基于SLAM 的思想提出增量式空三加密等新的理論方法來解決實時攝影測量技術發展過程中的關鍵問題,推動實時攝影測量技術較快發展,為各類應急基礎數據獲取提供新的技術方案。
猜你喜歡
心理學報(2022年4期)2022-04-12 07:38:02
水泵技術(2021年3期)2021-08-14 02:09:20
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
當代化工研究(2016年9期)2016-03-20 16:22:13
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
西華師范大學學報(自然科學版)(2015年3期)2015-02-27 15:31:22
測繪科學與工程(2013年3期)2013-03-11 15:07:36
