電液伺服泵控系統柔性傳動比理論研究
2021-11-17 00:25:24閆桂山張天貴陳革新賈春玉陳文斌
液壓與氣動 2021年11期
關鍵詞:系統
李 淵, 艾 超, 閆桂山, 張天貴, 陳革新,4, 賈春玉, 陳文斌
(1.燕山大學 機械工程學院, 河北 秦皇島 066004;2.河北省重型機械流體動力傳輸與控制實驗室, 河北 秦皇島 066004;3.燕山大學 先進鍛壓成形技術與科學教育部重點實驗室, 河北 秦皇島 066004;4.新疆工程學院 機電工程學院, 新疆維吾爾自治區 烏魯木齊 830023)
引言
電液伺服泵控系統相較于閥控系統具有抗污染能力強,設備占地面積小,功率電傳和環境友好等技術優勢[1-2],因此得到了國內外很多學者和企業的高度重視。隨著對泵控技術的深入研究和伺服電機技術的逐漸成熟,泵控技術得到進一步發展,目前已經在航空航天領域[3]得到廣泛應用,并且正在逐漸拓展應用到機器人[4]、鍛壓、風電、海工、船舶[5-6]、冶金、工程機械[7-8]等領域。
電液伺服泵控系統受參數時變及機電液耦合等綜合影響[9],系統傳動具有一定柔性傳輸規律,表現為較強的非線性。針對電液伺服泵控系統非線性柔性傳動規律,國內外進行了大量研究。YUAN H B等[10]考慮了油液壓縮、系統泄漏等非線性擾動,建立了系統的非線性傳輸數學模型,并采用灰箱系統辨識進行模型參數辨識。REN G等[11]通過研究系統油液泄漏引起非線性傳動規律,以此為基礎設計增益控制器,對系統高精度控制進行補償。HELIAN B等[12]針對液壓泵低轉速下壓力脈動非線性規律,采用自適應魯棒控制策略,顯著提高了泵控系統的動靜態特性。和東平等[13]針對系統垂直方向非線性傳輸規律,分析了非線性剛度系數、非線性阻尼系數等參數對系統控制的影響規律。袁曉明等[14]研究油液系統體積彈性模量對系統傳動特性的影響規律,運用Model1模型提高了流體壓縮和膨脹過程中動態體積彈性模量的匹配度。上述研究為電液伺服泵控系統非線性傳輸特性研究奠定了良好的基礎。
本研究針對電液伺服泵控系統中的非線性傳動問題,從廣義傳動比的角度進行研究和分析,提出柔性傳動比理論,得到伺服電機-定量泵-液壓缸之間的柔性傳動比規律,研究柔性傳動比的應用,提出基于廣義排量的壓力控制策略,并對其進行仿真和試驗研究。
1 工作原理
本研究以電液伺服泵控系統為研究對象,系統具體工作原理如圖1所示。系統采用伺服電機-定量泵-液壓缸傳動形式,與具有剛性傳動比的傳統伺服電缸的滾珠絲杠傳動形式相比,由于系統存在油液的泄漏、體積彈性模量改變等非線性因素,其具有柔性傳動比特性,具體對比如圖2所示。

1.伺服電機 2.定量泵 3.過濾器 4.單向閥 5.溢流閥 6.壓力傳感器 7.補油蓄能器 8.對稱液壓缸 9.位移傳感器

圖2 傳動比特性對比圖
2 柔性傳動比
由以上分析可知,電液伺服泵控系統表現出柔性傳動比特性,但對于系統輸入為轉速、轉矩等轉動物理特性參量,輸出為直線位移、速度等平動物理特性參量,兩者存在一定的量綱差異,無法直接應用傳統傳動比概念。為解決上述問題,本研究采用廣義傳動比方法對系統柔性傳動比規律進行表達。

(1)
從式(1)中可以解出X=L。
機械效率可用輸入、輸出動力與原機構相同,不存在摩擦的等力理想機構的廣義傳動比與實際廣義傳動比之比表示,適用于任何機械結構的傳動效率計算,使得任何機械結構的傳動效率都可以通過傳動比來計算分析,稱為傳遞效率的普遍式。同樣的,將廣義傳動比的概念引入液壓傳動系統中,由于液壓系統的柔性傳動特性,將上述的液壓傳動中廣義傳動比定義為柔性傳動比If。通過分析不同類型液壓系統的各種工況,建立對應的數學模型,見表1。

表1 SI標準力學量綱
通過分析系統的低速低壓、高壓低速工況,建立對應柔性傳動比的數學模型。
(1) 定義電機-泵的柔性傳動比為:
(2)
(3)
電機-泵的傳遞效率:
(4)
式中, [ε(p,T′)]反映了泵控系統的負載能力;[ε(q,n)]反映了泵控的速度變化能力;η(a,b)反映了泵控系統的功率特性。
(2) 定義泵-液壓缸的柔性傳動比為:
(5)
(6)
(7)
泵-液壓缸的傳遞效率:
(8)
(9)
(3) 定義電機-液壓缸的柔性傳動比:
(10)
(11)
電機-液壓缸的傳遞效率:
(12)
3 電液伺服泵控系統柔性傳動比
以電液伺服泵控系統的柔性傳動比研究為例,在伺服電機輸入轉速和外負載力FL作用下,液壓泵的流量連續性方程、液壓缸流量連續性方程和負載的力平衡方程為:
(13)
式中,dp—— 定量泵排量
nm—— 電機輸出轉速
Ctp—— 液壓泵泄漏系數
Ctc—— 液壓缸泄漏系數
Ap—— 液壓缸活塞有效面積
qL—— 液壓泵輸出流量
xp—— 液壓缸活塞位移
βe—— 油液有效體積彈性模量
K—— 彈性負載系數
Bp—— 黏性阻尼系數
mt—— 等效質量
pL—— 負載壓力
根據上述方程,當系統處于空載狀態(FL=0)且不考慮黏性阻尼和彈性負載(Bp=0,K=0)時,得到系統的柔性傳動比為:
(14)
式中,vp—— 電機輸出轉速
Ct—— 總泄漏系數(Ct=Ctp+Ctc)
其中,X6量綱為L。由式(14)可知,柔性傳動比的影響因素有系統的泄漏系數、外負載力、有效體積彈性模量以及油液的黏度。
將柔性傳動比概念應用到電液伺服泵控系統的壓力控制中,伺服電機-泵的能量傳遞關系為:
(15)
式中,ηm—— 電機-泵的傳遞效率
T′ —— 電機輸出扭矩
ω—— 電機輸出轉速
Δp—— 定量泵吸、排油口兩側壓差
q—— 定量泵輸出流量
將式(15)的表達形式擴展至描述液壓缸活塞速度和伺服電機輸出轉速之間的關系,把伺服電機-液壓缸之間的部分等效為廣義定量泵的概念,則液壓缸高壓腔的輸入流量等于伺服電機輸出轉速和廣義定量泵排量的乘積,定義廣義排量為Dg,其應用柔性傳動比的表達式為:
(16)
基準扭矩Tb計算公式為:
Tb=pLDg
(17)
廣義排量控制器通過給定壓力與液壓缸的速度反饋,計算得到基準扭矩Tb,壓力偏差信號ep經PID控制器作用后得到扭矩的補償值eT,兩者相互作用,作為伺服電機的扭矩輸入信號,實現對系統輸出壓力的精確閉環控制,電液伺服泵控系統中的壓力閉環控制框圖如圖3所示。

圖3 壓力閉環控制框圖
4 仿真與試驗研究
電液伺服泵控系統試驗臺整體包括工裝臺架、液壓系統、控制系統和軟件,其整體外形如圖4所示。

圖4 電液伺服泵控系統試驗臺
4.1 系統組成
1) 液壓系統
試驗臺的液壓系統主要由動力單元、補油蓄能器、吸收壓力脈動蓄能器、執行單元和安全卸荷模塊等組成,其中動力單元是整個系統試驗臺的核心部分。
系統的動力單元為MOOG電動伺服泵控單元(Electrohydrostatic Pump Unit,EPU),該動力單元結合了機電和液壓技術,具有高度集成、緊湊的優點,符合機電液一體化對于能源效率、環境清潔和高功重比的要求,其外形如圖5所示。

圖5 電動伺服泵控單元
EPU由伺服電機和定量泵組成,通過控制伺服電機的轉速,調節系統中的流量和壓力,其主要性能參數見表2。

表2 EPU主要參數
2) 電氣控制系統
電氣控制系統主要由上位機PLC、MOOG MSCII運動控制器、伺服驅動器和伺服電機組成,其結構框架如圖6所示。

圖6 電氣框架示意圖
4.2 軟參數測量模型
在MATLAB/Simulink中建立基于柔性傳動比控制策略的廣義排量控制器模型,該模型考慮了系統有效體積彈性模量、動態泄漏系數以及油液黏度對柔性傳動比的影響。通過模型的仿真分析來驗證所提出的柔性傳動比控制策略在階躍響應和正弦響應下的控制性能。
為得到系統的泄漏系數、油液有效體積彈性模量及油液的黏度等軟參量參數,應用伺服驅動軟測量方法,其軟參量測量模型框圖如圖7所示。定量泵的輸出流量、輸出壓力由泵的輸入轉速、轉矩及相關參數決定,其中轉速可以通過伺服電機的編碼器測得,轉矩通過轉矩電流和電機參數間接獲得。泄漏系數是系統在低壓低速工況時計算得到的,此時溫度變化不大,對油液有效體積彈性模量和黏度影響很小,故忽略對流量的影響,只考慮油液的泄漏。系統的泄漏主要包括泵和液壓缸的泄漏。

圖7 軟參量測量模型結構框圖
泄漏系數可表示為:
(18)
式中,qt—— 泄漏量
Δp—— 高、低壓腔兩腔壓差
泄漏量qt為輸入流量的理論值和實際值的差值。其中,液壓泵輸入流量的理論值由實際轉速和排量計算得出,液壓缸輸入流量的理論值由活塞桿有效面積和活塞桿的速度計算得出,活塞桿速度通過速度傳感器測得。輸入流量的實際值通過流量傳感器測得,高、低壓兩側壓差Δp通過壓力傳感器測得。
油液的黏度和有效彈性模量是在高壓低速工況時計算得到的。油液的黏度與溫度和壓力有關,其關系式為:
(19)
式中,ν—— 油液動力黏度
A,B,C—— 與液壓油有關的系數
λ—— 黏壓系數
T—— 油液溫度
p—— 系統工作壓力
其中,溫度和壓力通過傳感器測得,液壓油的黏壓系數由油液的相關參數和種類決定。
液壓油的有效體積彈性模量受油液體積及系統壓力影響,具體關系式為:
(20)
式中,V—— 液壓油的總體積
其中,油液的總體積通過流量和液壓缸活塞運行到極限位置的時間計算得到,系統的工作壓力通過壓力傳感器測得。
4.3 試驗與仿真分析
1) 廣義傳動比特性
將系統仿真模型的采樣周期設置為0.5 s,得到廣義傳動比If特性仿真曲線,如圖8所示。

圖8 廣義傳動比特性仿真曲線
由圖8可以看出,系統的廣義排量的變化是非線性的,在0.3 s之前系統流量提供液壓缸活塞桿運動,在到達穩態之后系統流量用來維持系統的泄漏,這與實際工作情況符合。
2) 階躍信號響應
在搭建好的仿真模型中,對系統施加從0~5 MPa的階躍信號,采用廣義排量控制方法和PID控制方法,同時觀察液壓缸高壓腔實際壓力與期望壓力的跟隨過程,如圖9、圖10所示。可以看出,基于傳統PID控制難以調節出最優的參數,穩態誤差比較大,達到±0.5 MPa;而基于柔性傳動比的廣義排量控制策略在跟隨期望階躍信號壓力曲線時,有較好的響應特性,穩態誤差達到±0.1 MPa,沒有明顯振蕩。

圖9 廣義排量控制壓力階躍響應曲線

圖10 PID控制壓力階躍響應曲線
3) 正弦信號響應
對系統施加從幅值為5 MPa的正弦信號,同時觀察采用廣義排量控制方法和PID控制方法時液壓缸高壓腔實際壓力與期望壓力的跟隨過程,如圖11、圖12所示。可以看出,傳統PID控制下壓力滯后現象比較突出;而基于柔性傳動比的廣義排量控制策略在跟隨壓力正弦曲線時,表現出良好的跟隨特性。
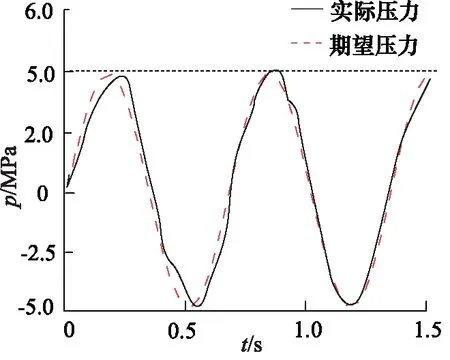
圖11 廣義排量控制壓力正弦響應曲線
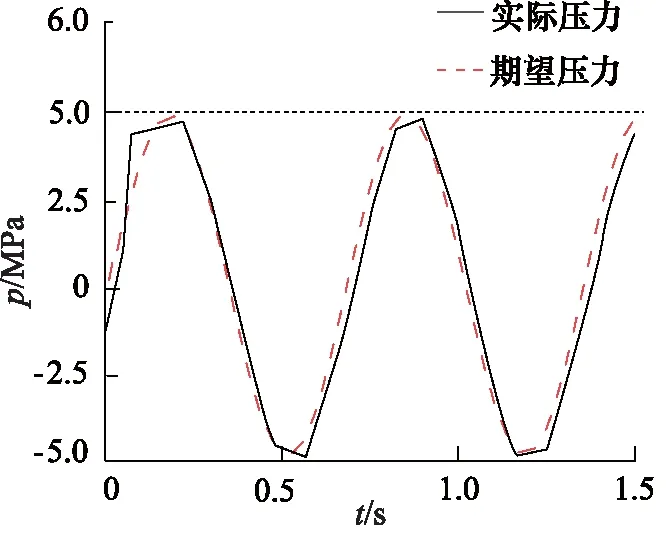
圖12 PID控制壓力正弦響應曲線
5 結論
針對電液伺服泵控系統柔性傳動特性進行研究,通過理論研究和仿真試驗分析,主要得到以下結論:
(1) 提出了電液伺服泵控柔性傳動比理論, 得到伺服電機-定量泵-液壓缸之間的柔性傳動比規律;
(2) 對柔性傳動比理論進行應用研究,提出了基于廣義排量的壓力控制策略;
(3) 對柔性傳動比理論應用進行了仿真和試驗研究,結果表明,柔性傳動比理論的應用對壓力控制具有良好的控制效果。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
