超空泡航行體非定常流體動(dòng)力延遲效應(yīng)水洞試驗(yàn)研究
2021-11-19 07:24:50劉喜燕袁緒龍汪新禹
實(shí)驗(yàn)流體力學(xué) 2021年5期
關(guān)鍵詞:模型
劉喜燕,袁緒龍,王 鷹,羅 凱,汪新禹
西北工業(yè)大學(xué) 航海學(xué)院,西安 710072
0 引言
根據(jù)空泡截面獨(dú)立擴(kuò)張?jiān)韀1],當(dāng)航行體非定常運(yùn)動(dòng)時(shí),位于空化器之后的航行體行進(jìn)在獨(dú)立膨脹的系列空泡截面形成的隧道中,航行體改變攻角時(shí),新生成的空泡經(jīng)過一段時(shí)間才能到達(dá)航行體尾部,改變沾濕面積,從而改變流體動(dòng)力的大小。這個(gè)時(shí)間滯后,即為“超空泡航行體非定常流體動(dòng)力的延遲效應(yīng)”,簡(jiǎn)稱“空泡延遲效應(yīng)(Cavity-delay effect)”。
空泡延遲效應(yīng)將在很大程度上影響主體空泡的流型和超空泡對(duì)航行體的包絡(luò)性[2]。為了研究超空泡航行體的運(yùn)動(dòng)特性,在動(dòng)力學(xué)建模時(shí)必須考慮空泡延遲效應(yīng)。Kirschner 等[3]指出超空泡航行體的動(dòng)力學(xué)特性展現(xiàn)出斜坡不連續(xù)的力學(xué)曲線和時(shí)間延遲效應(yīng),并分析了空泡延遲對(duì)航行體流體動(dòng)力的影響。Goel[4]根據(jù)空泡截面獨(dú)立擴(kuò)張?jiān)慝@取了超空泡航行體尾部滑行的非線性力,建立了考慮流體動(dòng)力延遲效應(yīng)的非線性動(dòng)力學(xué)模型。羅凱等[5]基于超空泡的獨(dú)立擴(kuò)張?jiān)恚紤]了超空泡的時(shí)間延遲效應(yīng),提出了可以描述超空泡航行體機(jī)動(dòng)航行特性的運(yùn)動(dòng)控制模型。李代金等[6]在超空泡時(shí)間延遲效應(yīng)的基礎(chǔ)上,建立了超空泡航行體空間運(yùn)動(dòng)模型。韓云濤等[7]針對(duì)航行體運(yùn)動(dòng)時(shí)存在的時(shí)滯問題,提出了一種狀態(tài)空間預(yù)測(cè)控制方法,建立的預(yù)測(cè)模型對(duì)具有時(shí)滯特性的超空泡航行體控制效果良好。
如果延遲時(shí)間為零,航行體與空泡之間的相對(duì)位置關(guān)系與定常運(yùn)動(dòng)時(shí)相同。延遲效應(yīng)的存在使得超空泡航行體動(dòng)力學(xué)模型出現(xiàn)振蕩,即尾部來回撞擊空泡壁,稱為“尾拍現(xiàn)象”。近年來,國內(nèi)外許多學(xué)者針對(duì)超空泡航行體的尾拍現(xiàn)象進(jìn)行了研究,李東旭[8]對(duì)超空泡射彈水下運(yùn)動(dòng)的空泡形態(tài)、尾拍運(yùn)動(dòng)進(jìn)行了試驗(yàn)分析,并對(duì)射彈空化流場(chǎng)進(jìn)行了數(shù)值模擬,模擬結(jié)果與試驗(yàn)結(jié)果吻合很好。何乾坤等[9]結(jié)合超空泡航行體尾拍運(yùn)動(dòng)與空泡變化互相耦合的特點(diǎn),建立了耦合運(yùn)動(dòng)方程,并對(duì)超空泡擺動(dòng)與尾拍的互相作用過程進(jìn)行了數(shù)值模擬,得到了不同速度和角速度的超空泡航行體運(yùn)動(dòng)過程以及超空泡擺動(dòng)對(duì)尾拍的影響規(guī)律。Kulkarni 等[10]基于滑水力模型計(jì)算航行器的尾拍受力,在忽略重力影響以及航行器以頭部為中心進(jìn)行旋轉(zhuǎn)的假設(shè)下,建立了超空泡射彈在單平面內(nèi)高速運(yùn)動(dòng)的動(dòng)力學(xué)簡(jiǎn)易模型,并成功預(yù)報(bào)了射彈尾部和空泡壁的拍擊運(yùn)動(dòng)。趙成功等[11-13]采用CFD 方法,通過耦合求解流場(chǎng)控制方程與剛體動(dòng)力學(xué)方程,建立了超空泡射彈平面運(yùn)動(dòng)的數(shù)值計(jì)算方法,研究了射彈在不同參數(shù)影響下的空泡形態(tài)、尾拍現(xiàn)象和彈道特性。
綜上所述,目前的研究主要集中在考慮延遲效應(yīng)的動(dòng)力學(xué)建模以及非定常運(yùn)動(dòng)尾拍過程中的流體動(dòng)力特性等方面,而對(duì)非定常流體動(dòng)力延遲效應(yīng)的定量試驗(yàn)研究較少。本文通過搭建連續(xù)變攻角測(cè)力試驗(yàn)平臺(tái),對(duì)超空泡航行體非定常流體動(dòng)力的延遲效應(yīng)進(jìn)行研究,為進(jìn)一步研究超空泡航行體尾拍現(xiàn)象形成機(jī)理及動(dòng)力學(xué)建模、超空泡航行體彈道特性和機(jī)動(dòng)航行控制技術(shù)打下一定基礎(chǔ)。
1 試驗(yàn)方法與裝置
本試驗(yàn)依托于西北工業(yè)大學(xué)高速水洞實(shí)驗(yàn)室開展,提出了連續(xù)變攻角測(cè)力試驗(yàn)方案,用于驗(yàn)證空泡延遲效應(yīng)對(duì)航行體流體動(dòng)力的影響。該水洞為封閉式循環(huán)水洞,是開展水下航行器流體力學(xué)研究的大型基礎(chǔ)試驗(yàn)平臺(tái),如圖1所示。
1.1 試驗(yàn)方法
超空泡航行體連續(xù)變攻角測(cè)力試驗(yàn)系統(tǒng)主要由攻角調(diào)節(jié)與測(cè)量系統(tǒng)、通氣流量控制與測(cè)量系統(tǒng)、流體動(dòng)力測(cè)量系統(tǒng)、壓力測(cè)量系統(tǒng)、圖像采集系統(tǒng)及模型主體組成,系統(tǒng)結(jié)構(gòu)如圖2所示。
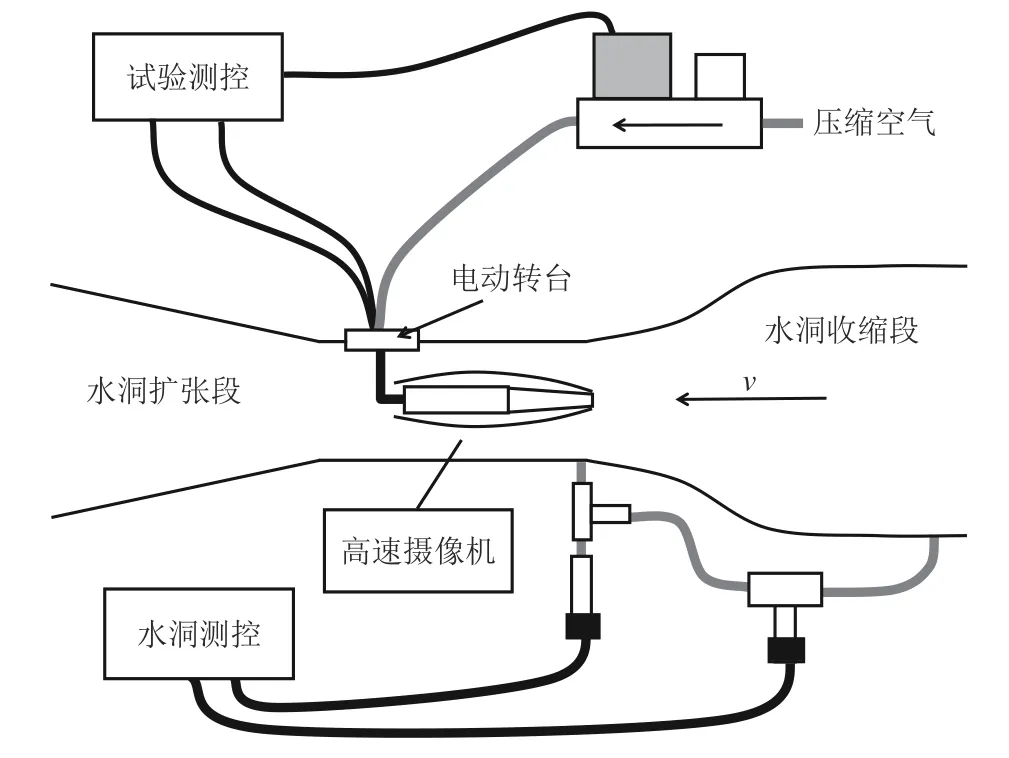
圖2 試驗(yàn)系統(tǒng)圖Fig.2 Diagram of experimental system
將模型以尾支撐方式安裝于水洞工作段的電動(dòng)轉(zhuǎn)臺(tái)上,通氣管路、測(cè)壓管路和天平導(dǎo)線從導(dǎo)流罩內(nèi)孔引出至洞體外,壓縮空氣經(jīng)流量控制器接至模型通氣管。試驗(yàn)開始前調(diào)整模型方向,使模型保持在0°攻角位置上。自編擺動(dòng)程序,由單片機(jī)控制步進(jìn)電機(jī),實(shí)現(xiàn)模型按設(shè)定規(guī)律連續(xù)擺動(dòng)。高速攝像機(jī)安置在模型前方和模型上方,記錄空泡隨航行體的變化過程。
1.2 試驗(yàn)裝置
為了開展此次試驗(yàn),搭建了專用的綜合測(cè)控系統(tǒng),此系統(tǒng)可以實(shí)現(xiàn)通氣流量控制與測(cè)量、模型攻角調(diào)節(jié)與測(cè)量、流體動(dòng)力測(cè)量和高速攝像機(jī)啟停控制等功能。
圖像采集系統(tǒng)主要由兩臺(tái)索尼DSC-RX10M2 高速攝像機(jī)構(gòu)成,由支架分別固定在模型前方和上方,透過水洞工作段的有機(jī)玻璃窗進(jìn)行拍攝,相機(jī)分辨率為1920 pixel×1080 pixel,拍攝幀速為1000 幀/s。
攻角調(diào)節(jié)與測(cè)量系統(tǒng)主要由電動(dòng)轉(zhuǎn)臺(tái)、步進(jìn)電機(jī)、旋轉(zhuǎn)編碼器、步進(jìn)電機(jī)驅(qū)動(dòng)器、單片機(jī)、控制器、直流電源構(gòu)成。測(cè)控計(jì)算機(jī)通過控制器向步進(jìn)電機(jī)驅(qū)動(dòng)器發(fā)送指定頻率的脈沖和轉(zhuǎn)向信號(hào);驅(qū)動(dòng)步進(jìn)電機(jī)以指定速度和方向轉(zhuǎn)動(dòng),進(jìn)而驅(qū)動(dòng)電動(dòng)轉(zhuǎn)臺(tái)帶動(dòng)模型按照指定規(guī)律轉(zhuǎn)動(dòng),從而實(shí)現(xiàn)攻角的連續(xù)調(diào)節(jié)動(dòng)作。旋轉(zhuǎn)編碼器則持續(xù)向測(cè)控計(jì)算機(jī)反饋其測(cè)量所得的模型旋轉(zhuǎn)角度。
流體動(dòng)力測(cè)量系統(tǒng)主要由內(nèi)置高精度三分力天平和NI9237 應(yīng)變數(shù)據(jù)采集器構(gòu)成。天平總長(zhǎng)120 mm,直徑20 mm;量程為軸向力±7 kg,側(cè)向力±5 kg,力矩±1 kg·m,精度5‰。通氣流量控制與測(cè)量系統(tǒng)主要由ALICAT 質(zhì)量流量控制器組成。該流量控制器量程為0~100 SLPM(標(biāo)準(zhǔn)升每分鐘,1SLPM=0.06 m3/h),精度為滿量程的1%;采用自編通氣流量控制軟件實(shí)現(xiàn)通氣流量的定時(shí)定量控制,且通氣過程中的實(shí)際流量參數(shù)由控制器實(shí)時(shí)采集并記錄。
2 試驗(yàn)?zāi)P?/h2>
試驗(yàn)?zāi)P筒捎眯¢L(zhǎng)徑比超空泡航行體外形,空化器直徑為19 mm,柱段直徑為54 mm,空化器前端面到圓柱段尾端面為362.7 mm。整套模型由空化器、圓錐段、圓柱段、尾噴管、整流罩和立支桿6 部分組成,其中空化器為可更換的獨(dú)立構(gòu)件。空化器前端面后方開有一圈通氣孔,壓縮空氣由PU 管引入航行體前錐段后經(jīng)過空化器后方的環(huán)狀縫隙,沿著航行體軸線方向往空泡內(nèi)補(bǔ)氣。在航行體肩部和圓柱段距尾部22.0 mm 處分別開有測(cè)壓孔,用PU 管將此處的壓力引出洞體外測(cè)量。立支桿安裝在電動(dòng)轉(zhuǎn)臺(tái)上,帶動(dòng)模型轉(zhuǎn)動(dòng)。試驗(yàn)?zāi)P偷膬?nèi)部結(jié)構(gòu)和安裝分別如圖3 和4所示。
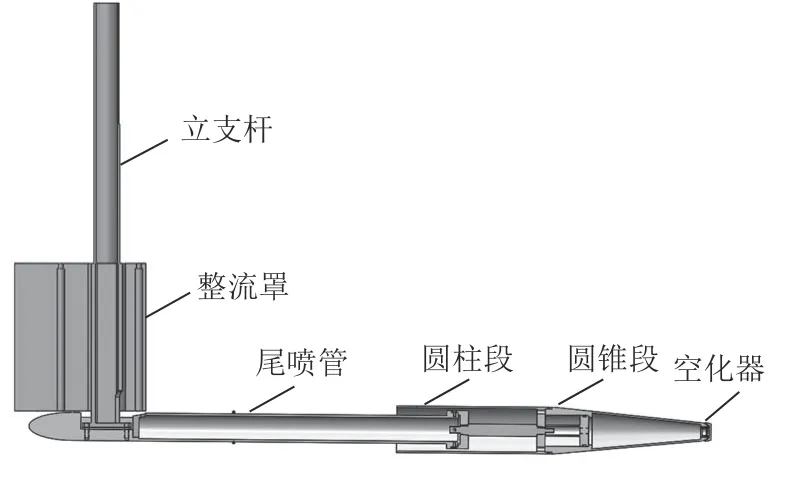
圖3 模型內(nèi)部結(jié)構(gòu)圖Fig.3 Internal structure of the model

圖4 試驗(yàn)?zāi)P涂傃b圖Fig.4 General assembly drawing of the experimental model
3 試驗(yàn)結(jié)果與分析
本文開展了水流速度、空化器舵角和擺動(dòng)頻率等參數(shù)對(duì)流體動(dòng)力延遲效應(yīng)的影響規(guī)律試驗(yàn),研究真實(shí)狀態(tài)下的流體動(dòng)力延遲效應(yīng)。試驗(yàn)工況如表1所示。
表1 試驗(yàn)工況Table 1 Experimental conditions
試驗(yàn)開始前,通過調(diào)節(jié)壓縮空氣流量來控制空泡形態(tài),確定在標(biāo)準(zhǔn)工況下通氣流量為80 SLPM。在試驗(yàn)的通氣過程中,水洞壓力會(huì)逐漸升高,洞體內(nèi)壓力通過控制系統(tǒng)自動(dòng)控制并穩(wěn)定在80 kPa 左右。
試驗(yàn)中,為消除通氣流量和水洞水流速度的脈動(dòng)變化帶來的誤差,保證結(jié)果的準(zhǔn)確性,每個(gè)工況均做重復(fù)試驗(yàn)。通過模型的運(yùn)動(dòng)角度與側(cè)向力數(shù)據(jù)對(duì)比來分析出現(xiàn)的延遲效應(yīng),計(jì)算各個(gè)運(yùn)動(dòng)周期下角度峰值與流體動(dòng)力峰值之間的時(shí)間差Δt,取均值作為該次試驗(yàn)的流體動(dòng)力延遲時(shí)間。對(duì)多次重復(fù)試驗(yàn)得到的延遲時(shí)間數(shù)據(jù)取均值,作為該工況下的流體動(dòng)力延遲時(shí)間t。
為方便對(duì)比分析,對(duì)延遲時(shí)間進(jìn)行無量綱化處理。取航行體長(zhǎng)度L=432 mm 為參考長(zhǎng)度,水流速度v為參考速度,則參考時(shí)間表達(dá)式如下:

其物理含義是流體介質(zhì)流經(jīng)航行體長(zhǎng)度所需的特征時(shí)間。以各工況的平均延遲時(shí)間t'除以參考時(shí)間tck可得一無量綱參數(shù),定義為延遲系數(shù)Cyc。
3.1 空泡生成及變化過程
圖5 給出了工況4 在連續(xù)變攻角測(cè)力試驗(yàn)過程中的空泡變化過程。可以看出,從時(shí)序1 到時(shí)序5 完整地展示出了空泡的生成過程。時(shí)序1,試驗(yàn)開始,啟動(dòng)水洞達(dá)到試驗(yàn)水速要求。時(shí)序2,通氣系統(tǒng)啟動(dòng),開始通氣,可以看到模型頭部開始出現(xiàn)水汽混合的云狀空泡。隨著通氣量的增加,空泡在時(shí)序3~4 進(jìn)一步發(fā)展。在時(shí)序3 可以清晰地看到空化器形成的空泡中存在明顯的回射流沖刷模型壁面,模型尾部開始出現(xiàn)空化。時(shí)序4,空泡發(fā)展到尾部,與尾部空泡開始融合,最終發(fā)展為時(shí)序5所示的閉合在尾噴管的完整透亮的超空泡。
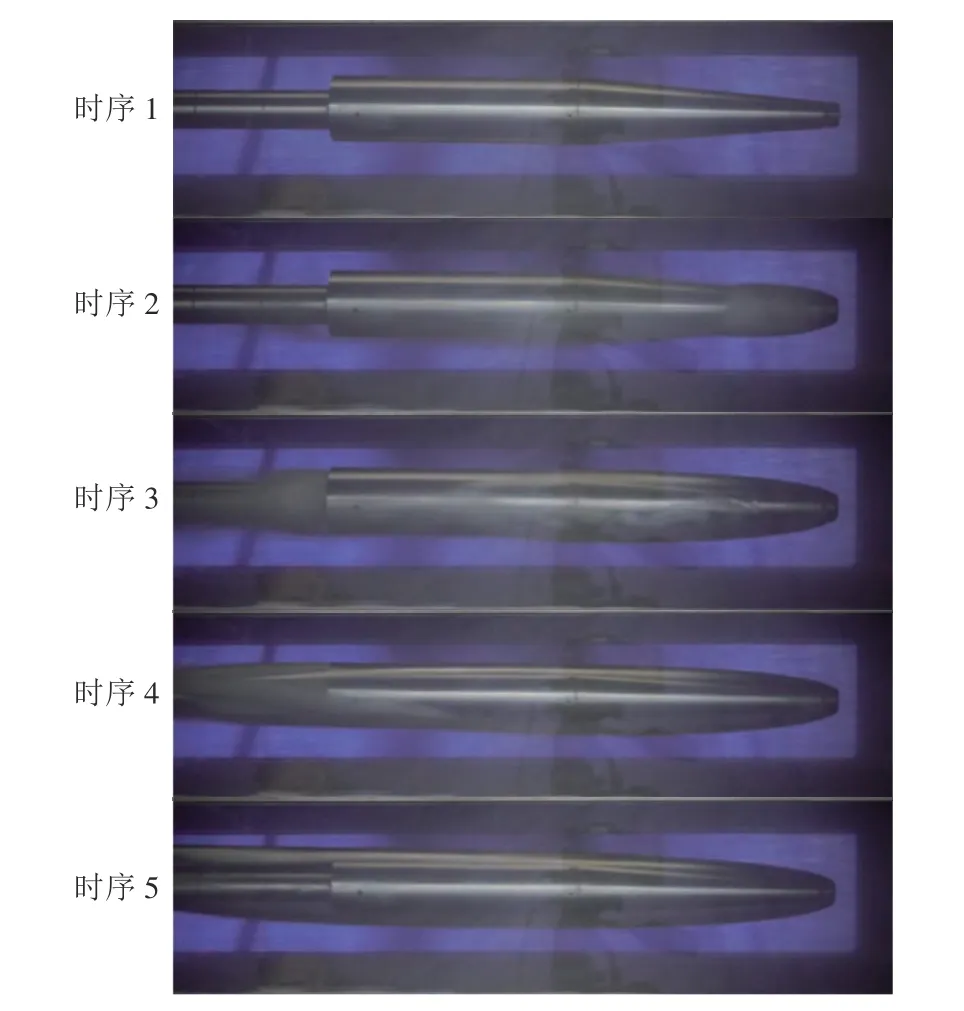
圖5 空泡生成及變化Fig.5 Generation and variation of cavity
為了更直觀地看到擺動(dòng)時(shí)空泡的延遲效應(yīng),在圖6 中給出了模型上方高速攝像機(jī)拍攝的空泡圖,圖中的黑線為模型中軸線位置。可以看出,時(shí)序1,空泡剛生成,關(guān)于中軸線對(duì)稱。之后,模型開始擺動(dòng),時(shí)序2~4 為模型擺動(dòng)到一側(cè)后又回到中軸線的過程。對(duì)比時(shí)序2 與3 的空泡圖,可以看出模型在時(shí)序2 擺動(dòng)到達(dá)預(yù)設(shè)位置,空泡發(fā)生延遲,在時(shí)序3 才產(chǎn)生與模型位置相對(duì)應(yīng)的空泡。時(shí)序4,模型回到中軸線位置,與時(shí)序1 的圖像對(duì)比發(fā)現(xiàn),此時(shí)空泡不對(duì)稱,同樣發(fā)生了延遲。之后的時(shí)序5~7 為模型擺動(dòng)到另一側(cè)后又回到中軸線的過程,同樣可以明顯地觀察到時(shí)序2~4 中的空泡延遲效應(yīng)。
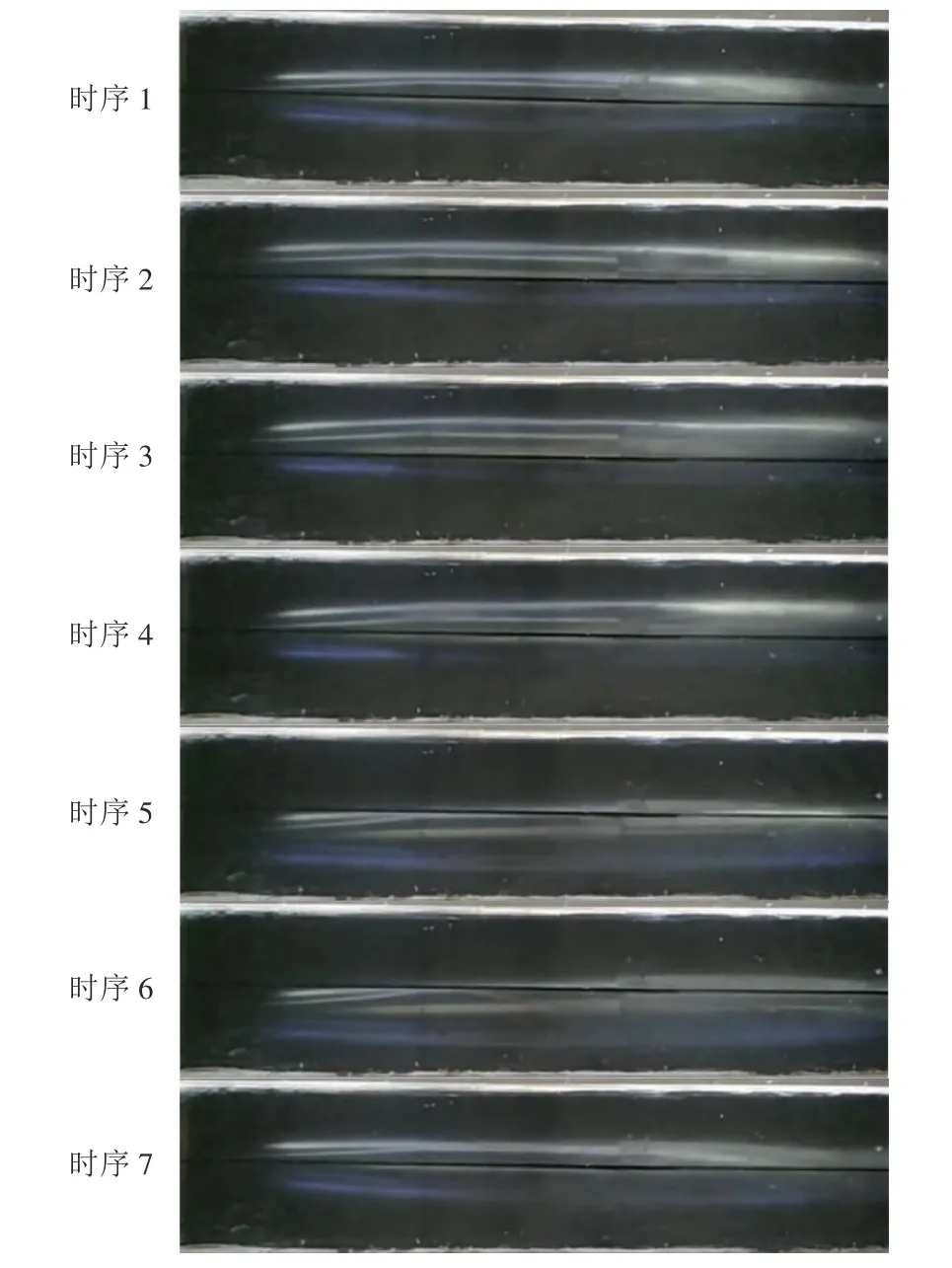
圖6 擺動(dòng)過程中空泡變化Fig.6 The change diagram of cavity during oscillation
3.2 水流速度影響分析
工況1~4 分別針對(duì)不同的水流速度展開研究,試驗(yàn)結(jié)果如圖7所示。圖中Fz–1 和Fz–2 分別為兩次重復(fù)試驗(yàn)中航行體模型所受到的側(cè)向力,Angle 代表擺動(dòng)角度,可以明顯看出,不同工況下側(cè)向力的大小存在明顯差異。
以工況4(圖7(d))為例進(jìn)行分析,結(jié)合空泡圖可以看出,在模型未擺動(dòng)前,空泡處于穩(wěn)定狀態(tài),模型被完整地包裹在空泡內(nèi),此時(shí)側(cè)向力基本不存在。隨著模型開始朝一側(cè)擺動(dòng),尾部迎流面出現(xiàn)沾濕,側(cè)向力開始逐漸增大。當(dāng)模型擺動(dòng)到最大幅值后開始回?cái)[,由于空泡形態(tài)發(fā)展相對(duì)于姿態(tài)改變的延遲特性,沾濕面積會(huì)繼續(xù)增大,側(cè)向力繼續(xù)增大,但變化率開始降低。當(dāng)側(cè)向力達(dá)到峰值時(shí),模型已經(jīng)擺回,側(cè)向力的峰值滯后于模型擺動(dòng)角度的峰值。
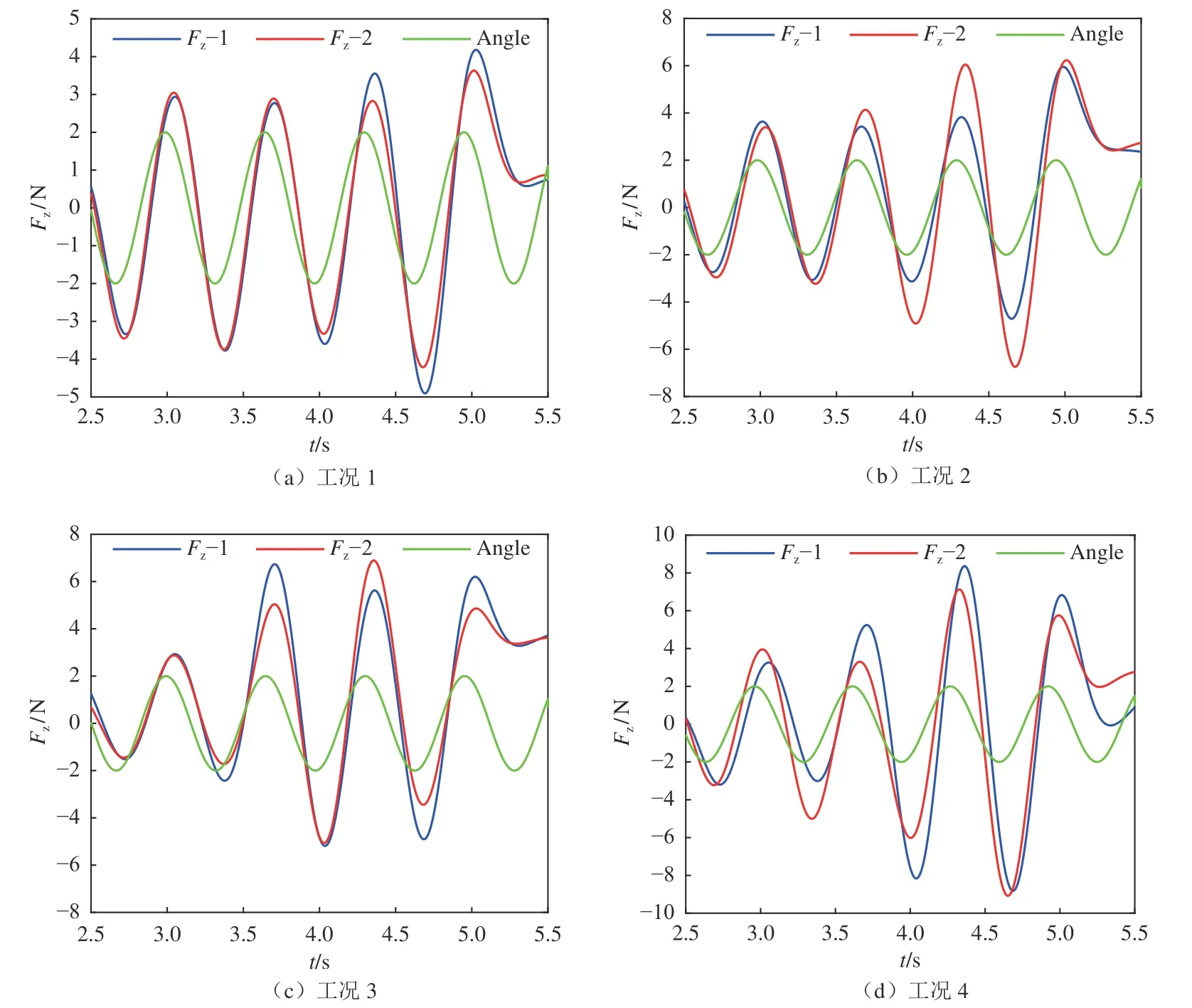
圖7 試驗(yàn)結(jié)果Fig.7 Experimental results
隨著模型繼續(xù)回?cái)[,附體空泡發(fā)展,圓柱段的沾濕面積持續(xù)減小。當(dāng)模型擺動(dòng)到初始位置時(shí),尾部仍然存在部分沾濕,側(cè)向力不為零。之后模型向另一側(cè)繼續(xù)擺動(dòng),空泡發(fā)展至完全包裹模型,側(cè)向力減小至零。隨著擺動(dòng)的繼續(xù),出現(xiàn)沾濕且面積逐漸增大,側(cè)向力隨之增大。當(dāng)擺動(dòng)達(dá)到最大幅值時(shí),側(cè)向力同樣并未達(dá)到峰值,側(cè)向力的峰值仍然滯后于模型擺動(dòng)角度的峰值。之后幾個(gè)周期的變化類似,故不再贅述。
表2 給出了不同水流速度下的流體動(dòng)力延遲時(shí)間和流體動(dòng)力延遲系數(shù)。
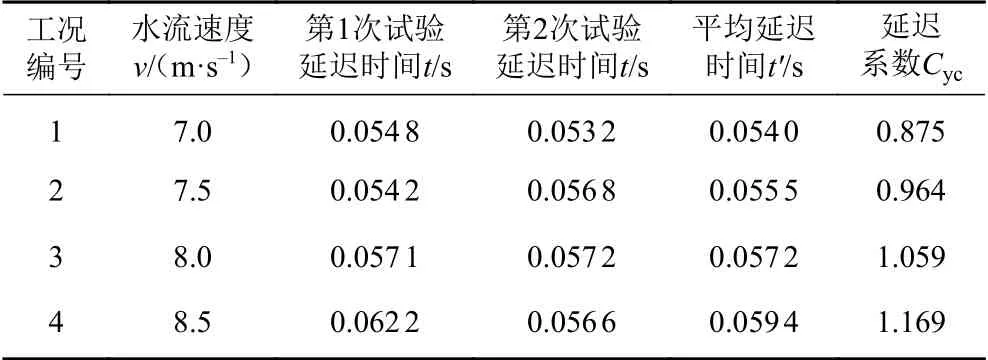
表2 不同水流速度下延遲時(shí)間對(duì)比Table 2 Comparison of delay time at different water velocity
圖8 給出了延遲系數(shù)隨水流速度的變化規(guī)律。可以看到,空泡引起的流體動(dòng)力延遲時(shí)間近似為水流過航行體全長(zhǎng)的時(shí)間,水流速度越高,延遲系數(shù)越大,與水流速度近似成線性關(guān)系,擬合關(guān)系式見圖8。從宏觀上看,模型處于靜止?fàn)顟B(tài)時(shí),空泡穩(wěn)定,泡內(nèi)流場(chǎng)結(jié)構(gòu)近似于層流。當(dāng)模型開始擺動(dòng),其產(chǎn)生的影響可以分為軸向擾動(dòng)和側(cè)向擾動(dòng),使得泡內(nèi)流動(dòng)從近似層流狀態(tài)向湍流狀態(tài)改變。空泡形狀改變的滯后正是由于擾動(dòng)經(jīng)水介質(zhì)傳播需要時(shí)間造成的。水流速度越高,擺動(dòng)時(shí)產(chǎn)生的擾動(dòng)越大,空泡形狀改變所需要的時(shí)間越長(zhǎng),延遲時(shí)間就越長(zhǎng)。
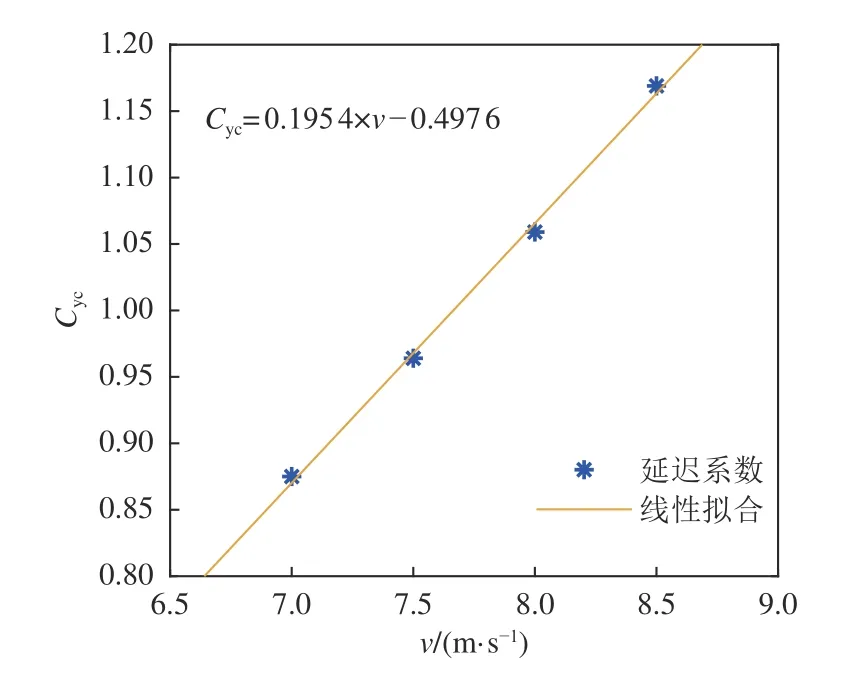
圖8 延遲系數(shù)隨水流速度的變化規(guī)律Fig.8 Variation of time-delay coefficient with water velocity
3.3 空化器舵角影響分析
空化器舵角使流場(chǎng)環(huán)境更加復(fù)雜,根據(jù)已有的研究經(jīng)驗(yàn),在同一擺動(dòng)周期,不同的運(yùn)動(dòng)方向會(huì)導(dǎo)致流體動(dòng)力的不對(duì)稱分布。考慮到試驗(yàn)條件和數(shù)據(jù)處理過程可能會(huì)丟失某些特征,對(duì)工況5 和6 各安排4 次重復(fù)試驗(yàn),試驗(yàn)結(jié)果分別如圖9 和10所示。
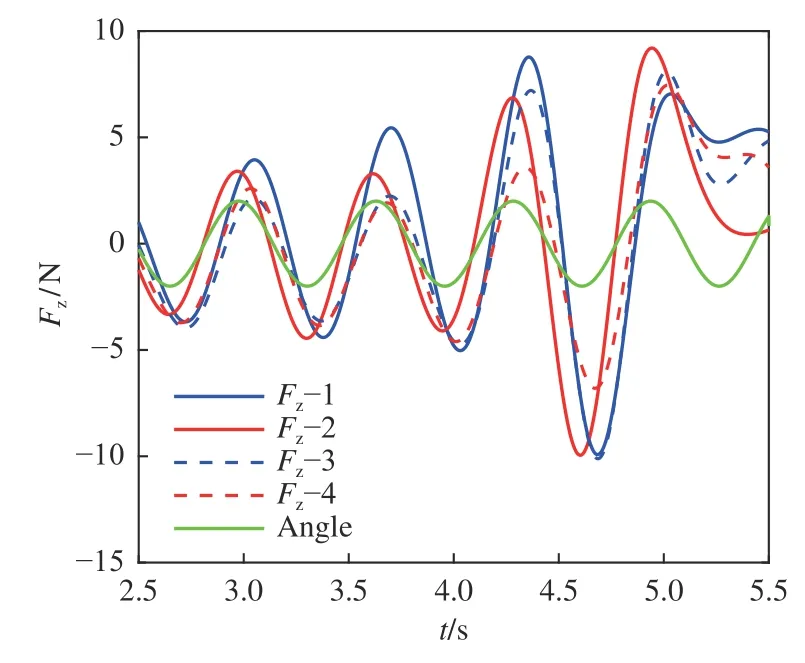
圖9 工況5 試驗(yàn)結(jié)果Fig.9 Results of Case 5
對(duì)試驗(yàn)結(jié)果進(jìn)行數(shù)據(jù)處理,并與預(yù)置舵角為0°的工況4 的試驗(yàn)結(jié)果進(jìn)行對(duì)比,得到空化器不同舵角下的流體動(dòng)力延遲時(shí)間和流體動(dòng)力延遲系數(shù),如表3所示。
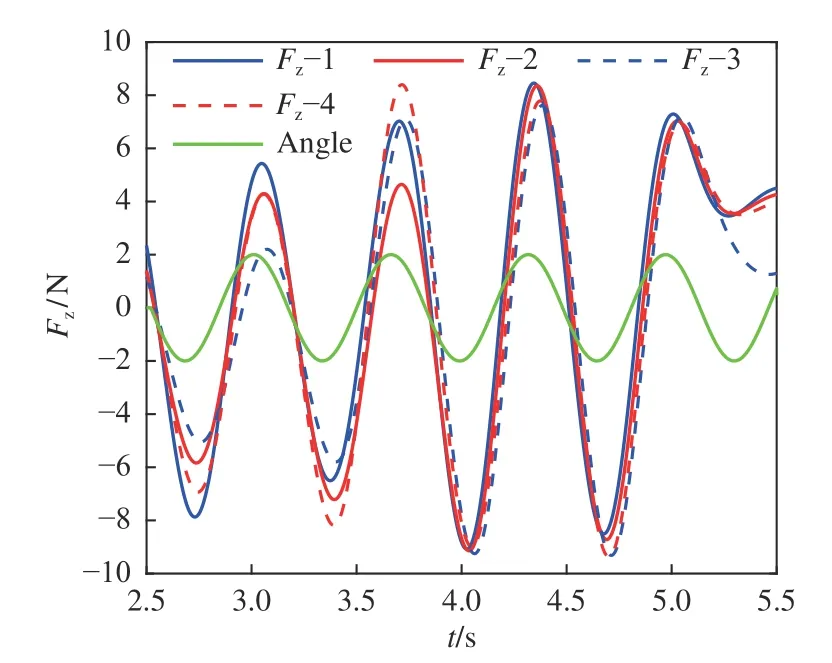
圖10 工況6 試驗(yàn)結(jié)果Fig.10 Results of Case 6

表3 空化器不同舵角下的延遲時(shí)間對(duì)比Table 3 Comparison of delay time at different rudder angle
延遲系數(shù)隨空化器舵角的變化規(guī)律如圖11所示,可以發(fā)現(xiàn)在試驗(yàn)的預(yù)置舵角范圍內(nèi),隨著預(yù)置舵角的增大,延遲時(shí)間增加。延遲系數(shù)與舵角近似成線性關(guān)系,擬合關(guān)系式見圖11。
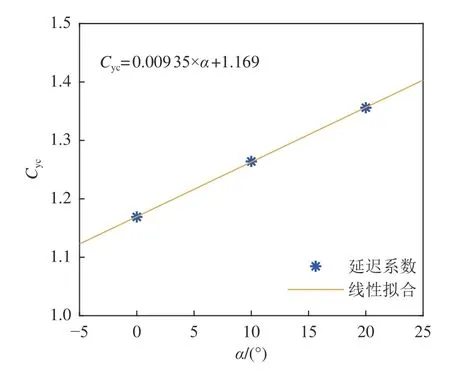
圖11 延遲系數(shù)隨舵角的變化規(guī)律Fig.11 Variation of time-delay coefficient with rudder angle
空化器預(yù)置舵角的存在使得航行體周圍流場(chǎng)呈現(xiàn)不對(duì)稱分布,導(dǎo)致空泡截面變形,從而出現(xiàn)斜流。舵角越大,空泡的傾斜越大,航行體尾部就越容易出現(xiàn)沾濕。沾濕時(shí),空泡邊界與尾部壁面的碰撞必然會(huì)導(dǎo)致空泡內(nèi)流場(chǎng)變復(fù)雜、擾動(dòng)增大,空泡形狀改變所需要的時(shí)間增加,即延遲時(shí)間增加。
3.4 擺動(dòng)頻率影響分析
航行體的擺動(dòng)頻率作為決定航行狀態(tài)的另一個(gè)重要特征參數(shù),與超空泡航行體非定常流體動(dòng)力的延遲特性密切相關(guān)。在一定程度上,可以用航行體連續(xù)往復(fù)擺動(dòng)來類比航行體在超空泡狀態(tài)下自由航行過程中發(fā)生的尾拍現(xiàn)象。試驗(yàn)針對(duì)1.00 和1.53 Hz擺動(dòng)頻率的延遲特性進(jìn)行了研究。對(duì)擺動(dòng)頻率為1.00 Hz 的工況7 安排了2 次重復(fù)試驗(yàn),試驗(yàn)結(jié)果如圖12所示。側(cè)向力的變化規(guī)律與工況4 類似,在之前已經(jīng)進(jìn)行了詳細(xì)的分析,這里不再贅述。數(shù)據(jù)處理后,與擺動(dòng)頻率為1.53 Hz 的工況4 的試驗(yàn)結(jié)果進(jìn)行對(duì)比,得到不同擺動(dòng)頻率下的流體動(dòng)力延遲時(shí)間和流體動(dòng)力延遲系數(shù),如表4所示。
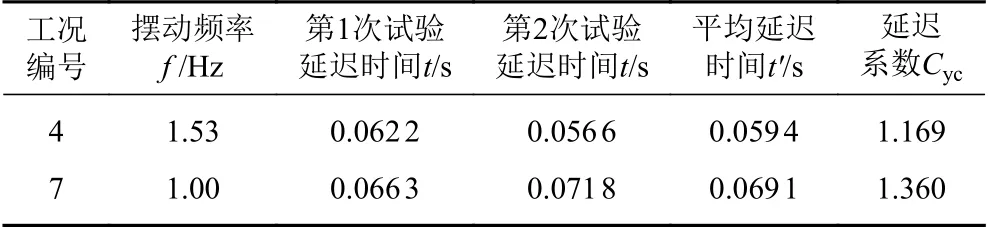
表4 不同擺動(dòng)頻率下延遲時(shí)間對(duì)比Table 4 Comparison of delay time at different oscillation frequency
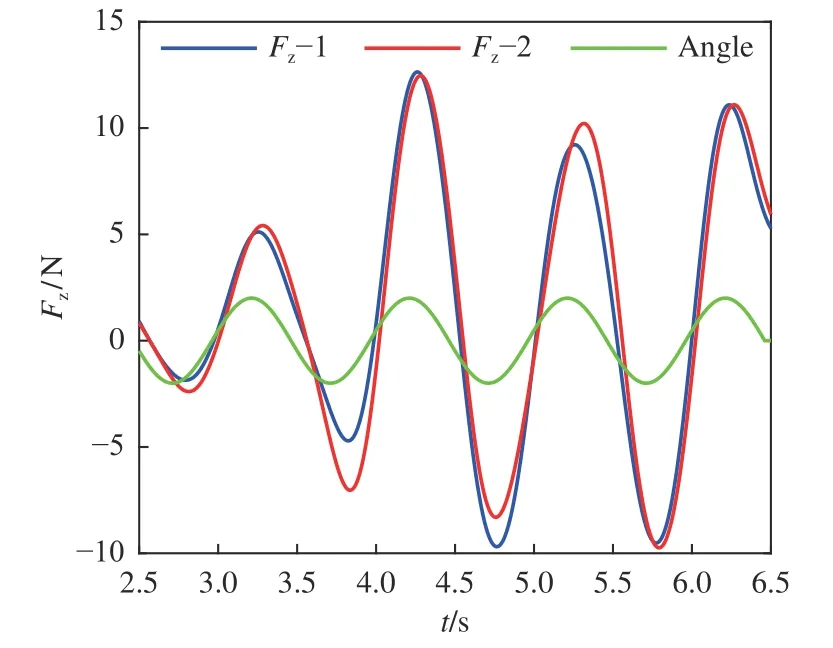
圖12 工況7 試驗(yàn)結(jié)果Fig.12 Results of Case 7
延遲系數(shù)隨擺動(dòng)頻率的變化規(guī)律如圖13所示。通過數(shù)據(jù)的對(duì)比可以看到,在試驗(yàn)設(shè)置的擺動(dòng)頻率范圍下,擺動(dòng)頻率越大,延遲時(shí)間越少。
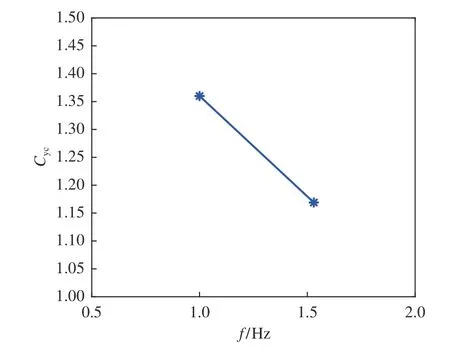
圖13 延遲系數(shù)隨擺動(dòng)頻率的變化規(guī)律Fig.13 Variation of time-delay coefficient with oscillation frequency
由于航行體擺動(dòng)頻率發(fā)生變化,空泡隨航行體位置改變進(jìn)行狀態(tài)更新的頻率也發(fā)生變化。擺動(dòng)頻率越大,即擺動(dòng)周期越小,對(duì)流場(chǎng)產(chǎn)生的擾動(dòng)間隔越小,空泡延遲時(shí)間相應(yīng)的也越少。
4 結(jié)論
本文通過連續(xù)變攻角測(cè)力試驗(yàn),測(cè)量并分析了超空泡航行體的空泡及流體動(dòng)力的延遲效應(yīng),在水洞試驗(yàn)條件下獲得了水流速度、空化器舵角和擺動(dòng)頻率對(duì)延遲效應(yīng)的影響規(guī)律,得到以下結(jié)論:
1)在航行體擺動(dòng)過程中,模型尾部會(huì)出現(xiàn)反復(fù)沾濕,內(nèi)流場(chǎng)變復(fù)雜,從拍攝圖像中可以明顯觀察到空泡的延遲效應(yīng)。
2)水流速度越高,擺動(dòng)時(shí)產(chǎn)生的擾動(dòng)越大,空泡形狀改變所需要的時(shí)間越長(zhǎng),即延遲時(shí)間越長(zhǎng),延遲時(shí)間約為水流流經(jīng)模型全長(zhǎng)的時(shí)間,且延遲系數(shù)與水流速度近似成線性關(guān)系。
3)在試驗(yàn)預(yù)置舵角范圍內(nèi),隨著預(yù)置舵角的增大,航行體尾部出現(xiàn)沾濕,擾動(dòng)增大,空泡形狀改變所需要的時(shí)間增加,延遲時(shí)間增加,延遲系數(shù)與舵角近似成線性關(guān)系;在試驗(yàn)設(shè)置的兩個(gè)擺動(dòng)頻率下,擺動(dòng)頻率越大,延遲時(shí)間越少。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
