方差補償自適應Kalman濾波在變形監測中的應用
2021-11-24 05:08:43曹留霞
科學與生活 2021年18期
關鍵詞:卡爾曼濾波

摘要:目前因誤差對觀測數據的影響,不能得到有效的觀測數據。本文針對因動態噪聲不準或者不確定因素的影響,對影響標準卡爾曼濾波的因素進行研究,并根據研究的結果,對方差補償自適應卡爾曼濾波進行探討。分別使用方差分量估計自適應Kalman濾波、標準Kalman濾波和方差補償自適應Kalman濾波三種方法對變形監測的數據進行處理,研究結果表明在利用以上三種方法對變形監測數據進行處理時,中方差補償自適應卡爾曼濾波剔除變形監測數據的噪聲效果更好。
關鍵詞:變形監測;卡爾曼濾波;自適應;方差補償
Abstract:At present, due to the influence of errors on observation data, effective observation data can not be obtained. In this paper, the factors that affect the standard Kalman filter are studied because of inaccurate or uncertain dynamic noise, and the variance compensation adaptive Kalman filter is discussed according to the research results. Three methods, variance component estimation adaptive Kalman filter, standard Kalman filter and variance compensation adaptive Kalman filter, are used to process the deformation monitoring data respectively. The results show that when the above three methods are used to process the deformation monitoring data, the middle variance compensation adaptive Kalman filter has better effect in eliminating the noise of deformation monitoring data.
Key words:deformation monitoring; Kalman filtering; adaptive; variance-compensating
隨著技術的發展,GPS、三維激光掃描儀和測量機器人等新技術在變形監測中的應用越來越多,面對監測信息數據量大、信息面交廣等問題,應及時高效快速地從大量的變形監測數據中對所需信息進行挖掘,來對變形進行分析和解釋[1],并及時對存在的隱患進行排查[1]。卡爾曼濾波是對存在的一系列誤差的實際觀測量進行處理來得到物理參數的最佳估值,它還具有最小無偏方差性[2],所以Kalman在變形監測數據處理中的應用越來越廣泛。它對狀態和量測兩個方程進行建立,從而用此來描述系統的動態過程,對濾波增益矩陣的變化進行觀察來定量識別并提取觀測數據中的有效數據,然后對狀態參量進行修正,在處理過程中無需對各個不同時間的觀測數據進行存儲,對數據進行實時處理[3]。本文對該問題進行研究,討論將方差補償法與自適應卡爾曼濾波方法相結合,即自適應卡爾曼濾波的方法來對該問題進行處理,此方法的構想思路主要為:在進行濾波中,使用已知的信息對動態噪聲方差陣濾波進行實時監測估計,并且補償噪聲方差或者協方差存在的不足。
1、自適應卡爾曼濾波模型的建立及其算法流程
1.1方差補償自適應濾波模型的建立
通過對消除誤差模型數據的分析和需要實時處理變形監測數據的要求,討論利用方差補償自適應卡爾曼濾波的方法來處理濾波模型中發散的問題。該方法主要是利用預測殘差的方法來處理動態噪聲中的協方差向量,從而使協方差向量得到修正,來使計算得到的狀態向量更加準確的接近實際[4]。該方法的基本思路為:
1.2方差補償自適應濾波的算法介紹
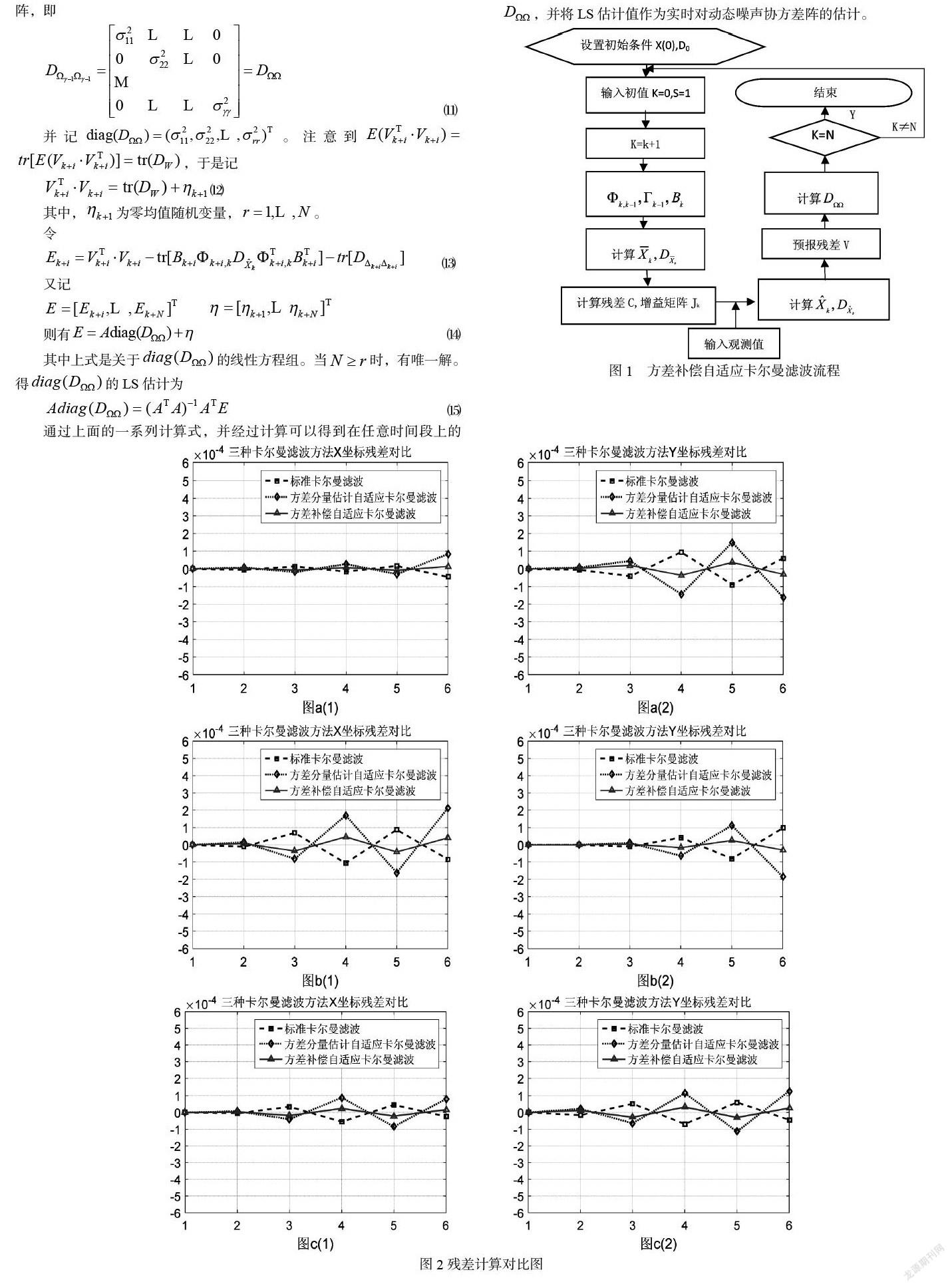
在變形監測過程中利用不同的物理量,可以對觀測方程和狀態方程進行構建[6]。利用上面的動態方程、觀測方程以及自適應卡爾曼濾波的遞推計算方程,可以對該濾波進行推算,其計算流程見圖1。
通過對圖1的觀察不難看出,只要給定開始的初始狀態,輸入觀測數據,相應的狀態估值可以立即得到。殘差在濾波過程完整地反映了 和 的綜合影響,同時它也是一個評價指標針對濾波質量進行評價[7]。預測殘差值影響增益矩陣值,濾波的穩定性通過預測狀態協方差陣的變化情況進行判斷[10]。分析可以得到修正協方差 可以對濾波偏差及濾波預報偏差的估計值進行影響。
2自適應卡爾曼濾波的應用
2.1監測實施方案
本監測實施方案中共布設了2個(J1、J2)基準點,3個(B1、B2、B3)滑坡監測點。每5天對監測點進行觀測一次,一共監測6期。利用布設的兩個基準點以及三個滑坡監測點構建成GPS觀測網,采用強制歸心裝置對監測點上的觀測墩進行設置。
2.2數據處理及分析結果
首先利用GPPS和GAMIT/GLOBK軟件對觀測的數據進行處理,基準點分別是以J1和J2兩個參考點,使用經典最小二乘平差方法對監測點的每期坐標進行計算。第二步分別使用以上三種方法對觀測數據進行濾波處理,通過實時地觀察分析觀測值與濾波值的一致性[8-9]。借助MATLAB編程軟件,使得計算過程得以實現[11],利用三種不同的方法對3個監測點的殘差計算對比圖分別為圖a、b、c。
從各監測點的三種卡爾曼濾波方法的殘差對比圖中可以看出三種卡爾曼濾波值與真實值的殘差都不超過1mm,以上結果說明在變形監測的實際情況反應方面標準卡爾曼濾波和自適應卡爾曼濾波都比較好。從圖中也不難發現標準卡爾曼濾波和方差估計卡爾曼濾波殘差值的波動都比較大,并且隨著濾波次數的增加波動的趨勢一直在增大,收斂性不好。通過對加上方差補償改正后的結果,可以明顯看出加上方差補償歸正后的累計殘差均明顯小于未進行改正的濾波值殘差和方差分量估計的濾波殘差,并且有較好的收斂性和平穩性。
3結論
方差補償自適應卡爾曼濾波在變形監測數據處理過程中對模型的不斷修正,使其更能接近最真實的變形過程。同時很好的解決了傳統卡爾曼濾波在處理變形監測數據時出現的動態噪聲模糊以至于對結果的準確性造成影響的問題。通過研究分析不難看出,本文采用方差補償自適應卡爾曼濾波的方法能很好的剔除變形監測數據中的噪聲,并且效果比較明顯。
參考文獻
[1]王利,李亞紅,劉萬林.卡爾曼濾波在大壩動態變形監測數據處理中的應用[J].西安科技大學學報,2006,26(03):353-357.
[2]衛建東.現代變形監測技術的發展現狀與展望[J].測繪科學,2007,32 (06):10-13.
[3]胡友健,梁新美,許成功.論GPS變形監測技術的現狀與發展趨勢[J].測繪科學,2006,31(05):155-157.
[4]毛亞純.基于測量機器人的變形監測系統研究[D].東北大學,2011.
[5]徐進軍,王海城,羅喻真,王尚慶,嚴學清.基于三維激光掃描的滑坡變形監測與數據處理[J].巖土力學,2010,31(07):2188-2191.
[6]郭樹人,郭海榮,何海波,李獻球,李彥.GPS動態數據處理中的快速Kalman濾波算法[J].測繪科學技術學報,2006,23(03):171-173.
[7]高雅萍.GPS變形監測網穩定性分析及自適應卡爾曼濾波除噪[D].長安大學,2005.
[8]陳遠,張小紅,郭斐,熊旭,李海英.自適應卡爾曼濾波在GPS/DR組合導航中的應用[J].測繪科學,2010,25(03):169-170.
[9]陳慧香,孫蕾.基于自適應卡爾曼濾波的高層建筑物沉降預測模型研究[J].北京測繪,2015,03:51-54.
[10]賈萍.自適應卡爾曼濾波在變形監測數據處理中的應用研究[D].昆明理工大學,2012.
[11]張福榮.自適應卡爾曼濾波在變形監測數據處理中的應用研究[D].長安大學,2009.
[12]李奕.自適應卡爾曼濾波在變形監測數據處理中的應用研究[D].成都理工大學,2012.
作者簡介
曹留霞(199002),女,漢族,河南西華,助理工程師,碩士研究生,貴州省測繪資料檔案館,測繪方向。
猜你喜歡
測控技術(2018年11期)2018-12-07 05:49:38
測控技術(2018年12期)2018-11-25 09:37:34
電測與儀表(2017年20期)2017-12-19 05:14:28
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
中國慣性技術學報(2017年1期)2017-06-09 08:15:14
電測與儀表(2016年21期)2016-04-11 12:42:44
電源技術(2016年9期)2016-02-27 09:05:39
江蘇科技大學學報(自然科學版)(2015年4期)2015-12-17 12:42:50
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36