Mecanum 輪底盤坡道行駛的運動學研究
2021-11-29 04:40:24崔孟楠竇志紅劉星棟吳平
應用科技 2021年5期
關鍵詞:分析
崔孟楠,竇志紅,劉星棟,吳平
北京航天自動控制研究所,北京 100854
隨著人工智能的發展,以自動導引運輸車(automated guided vehicle,AGV)為代表的移動機器人產品在生產和生活領域應用獲得了前所未有的發展[1?3]。Mecanum 輪由于其多自由度的特點,被廣泛應用于有全向移動需求的各類型移動機器人底盤上。
Mecanum 輪 是1973 年由瑞士人Bengt Ilon 設計的,由一個輪轂支撐架和若干沿一定角度排布安裝在輪轂周圍自由運動的輥子組成,輥子的外表面形狀是曲面,輪轂周圍的輥子的輪體的包絡線形成一個完整的圓。
特殊的結構使Mecanum 輪具有3 個自由度,分別為繞輪子軸線轉動、繞輥子與地面接觸點的轉動和沿輥子軸線垂直方向的平動。由于特殊的結構及其動力特性,使得采用Mecanum 輪的底盤大多應用于較為平整的路面上,這也在一定程度上限制了該種車輪底盤的應用和推廣。通過研究Mecanum 輪底盤在復雜路況下的運動特性,可以在一定程度上擴展底盤及整機的應用范圍[4?5]。
1 Mecanum 輪底盤運動學及動力學分析
1.1 Mecanum 輪受力情況分析
Mecanum 輪結構如圖1 所示,在平面運動時,輪轂外沿輥子的圓柱包絡面與地面接觸,且在任意時刻至少有一個輥子與地面接觸[6?7]。

圖1 Mecanum 輪結構示意
底盤行駛過程中,電機的輸出扭矩Td經過離合器、減速機、傳動軸、驅動橋傳到車輪上,則驅動輪的扭矩T可表示為[8]

式中:i為 減速機的減速比,η為傳動效率。
圖2 為驅動輪滾動過程受力示意圖。

圖2 驅動輪滾動過程受力示意
如圖2 所示,驅動輪部位正壓力為FN,輪緣與地面接觸部位為靜摩擦,車輪對地面產生作用力Fo,路面給車輪的反作用摩擦力即為車輪前進的驅動力Fk。工程上通過試驗可以測得車輪與地面的附著系數 φ,當驅動力大于車輪對地面的附著力Fφ時會產生打滑,則車輪進行純滾動的條件為[7?8]

圖3 為Mecanum 輪輥子受力示意圖。
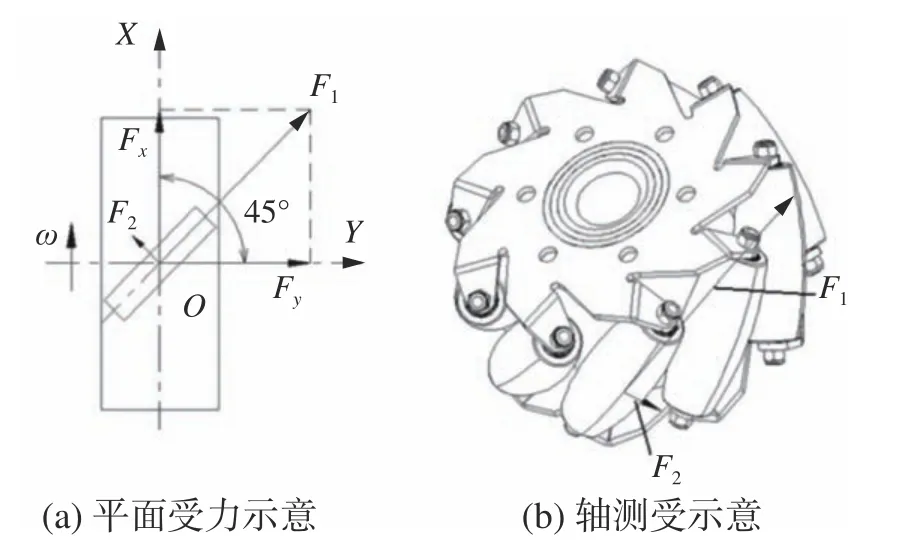
圖3 Mecanum 輪輥子受力示意
如圖3 所示,斜線方向為底部輥子與地面接觸時的方向,輥子的傾斜角度一般為45°。牽引力Fk是 由沿輥子軸線方向上的靜摩擦力F1和垂直于輥子軸線方向的滾動摩擦力F2兩個力合成所得。

式中:μ1為 摩擦系數,由試驗測得;μ2為滾動摩擦系數,由試驗測得。
由于輥子外側采用具有彈性且摩擦系數較大的聚氨酯、橡膠等材料制成,而輥子轉軸兩側安裝有滾動順暢的軸承,因此Mecanum 輪輥子的靜摩擦力F1遠 大于滾動摩擦力F2,一般在分析時取牽引力Fk≈F1。在圖3 所示的車輪坐標系下,牽引力Fk可 分解為Fx及Fy共2 個方向的分力,其中Fx作為車輪整體向前滾動的驅動力,根據與驅動扭矩的關系可以得到[9]:

1.2 Mecanum 輪底盤運動學分析
四輪Mecanum 輪底盤是目前工業應用中最為常見的結構形式,四輪布置位置及方向在很大程度上會影響底盤整體的運動特性,綜合多種運動特性分析,較為常用的一種結構布局如圖4所示[10]。

圖4 四輪Mecanum 底盤廣義坐標系示意
建立底盤廣義坐標系XOY(圖4)和單輪局部坐標系xioiyi(i=1,2,3,4)如 圖5,其中R為Mecanum輪半徑,I1、I2分 別為底盤輪距、軸距的一半,α為Mecanum 輪輥子軸線與輪轂軸線的夾角,4 個車輪均為45°。設4 個輪的角速度分別為 ω1~ ω4,每個輪輥子滾動速度為vg1~vg4,底盤的縱向速度為vx,橫向速度為vy,旋轉速度為 ωo。

圖5 單輪局部坐標系示意
將第1 個Mecanum輪在局部坐標系和整車廣義坐標系中分別進行運動參數分析,其運動學方程分別如下:
在局部坐標系x1o1y1中有:

在廣義坐標系XOY中有:

式(1)和式(2)聯立求得:

對4 個車輪進行相同的分析,則得到整車的逆運動學方程:
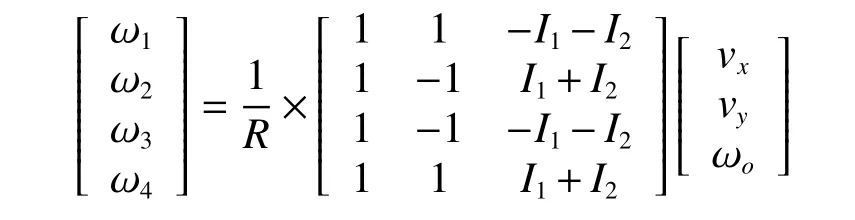
對于運動協調平穩的底盤,4 個車輪轉速的線性關系為

如式(3)不成立,則表明出現了底盤運動打滑現象,影響平臺的正常運行。
根據底盤運動學方程可看出,通過分別控制4 個車輪的轉速,車輪旋轉過程中輥子與地面接觸,由此產生沿輥子自身軸線方向的摩擦力,4 個車輪的摩擦力作為驅動力,通過不同組合實現底盤的各種運動模式。典型運動模式下車輪受力情況如圖6。分別將4 個車輪的驅動力在底盤質心上進行合成,即可得到底盤整體的驅動合力Fk及轉矩T[9?10]。

圖6 底盤運動控制模式
1.3 Mecanum 輪底盤坡道靜力學分析
車輛在坡道上行駛過程中,驅動輪產生驅動合力Fk,需要克服的各種阻力包括:摩擦阻力Fg、空氣阻力Fw、坡道阻力Ft及 加速阻力Fa。Mecanum輪底盤在坡道上穩定低速行駛時,加速阻力Fa為0,空氣阻力Fw微小可忽略,運行中的滾動摩擦阻力Fg與 由重力分量產生的坡道阻力Ft相比也較小可忽略,因此坡道行駛過程中底盤主要受坡道阻力Ft影響。
坡道阻力Ft為底盤在坡道行駛時重力沿坡道方向的分力,底盤在坡道行駛可分為直線行駛和斜向行駛2種狀態。直線行駛時坡道阻力Ft=G·sinθ。斜向行駛時,如圖7 所示,底盤縱向軸線與坡道縱向存在一定的偏向角δ。

圖7 斜向坡道底盤受力分解示意

由于底盤運動過程的牽引力是以摩擦力表現出來的,如果摩擦力(牽引力)小于下滑分量就會出現打滑現象。綜合以上分析,底盤滿足坡道上穩定行駛的工作條件為[12]

式中Ti為第i個驅動輪扭矩,i=1,2,3,4。
1.4 Mecanum 輪底盤動力學分析
圖8 為底盤坡道行駛過程中坐標轉換示意圖,采用運動學轉化方法,在廣義坐標系下,定義底盤沿XG方 向的位移分量SX,沿YG方向的位移分量SY,回轉角度 θO。

圖8 底盤坐標轉換運動簡圖

式中:J為底盤的轉動慣量,Jω為底盤驅動輪的轉動慣量,Jm為電機的轉動慣量。根據靜力學分析可知摩擦力在動態變化,因此需要動態控制各電機的驅動力矩,動力學分析可為底盤在斜路面上的運動平穩性控制研究提供理論依據。
1.5 坡道行駛特性分析
圖9(a)為直線坡道行駛示意圖,圖9(b)為斜向坡道行駛示意圖。在底盤上坡過程中,可分為3 個階段:階段1 為駛入階段,該階段4 個車輪先后從平面駛上坡道;階段2 為全坡道階段,該階段4 個車輪與坡道完全接觸;階段3 為駛離階段,該階段4 個車輪先后從駛離坡道。

圖9 底盤上坡行駛3 個階段示意
直線坡道行駛較為簡單,與水平路面直線行駛相似,只要驅動合力Fk≥Ft即可保證底盤順利駛上坡道。
斜向坡道行駛較為復雜,在駛入階段,由于偏向角 α的存在,4 個車輪先后與坡道接觸,造成兩側車輪的對地正壓力不同,受力無對稱性,由此產生的驅動合力Fk及 轉矩T會致使底盤出現橫向滑移、方向轉向等現象。駛離階段和駛入階段相似,而在全坡道階段4 個車輪與地面接觸良好,受力情況相對簡單,運動狀態較為平穩。
Mecanum 輪底盤的運動狀態會受到整體結構、懸掛剛度、坡道坡度、偏移角度等諸多因素的影響,會隨過程實時變化,因此無法通過簡單的理論計算和分析獲取準確的運行狀態。本文通過對Mecanum 輪底盤斜向坡道的理論分析和運動仿真分析,提出底盤設計的優化方案,從而減小爬坡過程中底盤的橫向偏移量,提高運動穩定性和對窄坡道的通過性。
2 運動仿真分析
2.1 仿真模型及系統搭建
某型機器人及底盤結構示意圖如圖10 所示,機器人采用四輪式Mecanum 輪底盤,前后輪采用圖示的單擺臂式懸掛減震系統。在Adams 中對機器人整機進行運動學分析,仿真模型如圖11 所示,由車架、Mecanum 輪、擺臂、減震器及配重等組成,定義機器人的總重為100 kg,輪距530 mm;軸距600 mm;輪半徑100 mm。仿真模型對車架及懸掛部分進行了一定的簡化,將配重分為前、后兩塊,用于模擬質心位置不同時對運動的影響;添加輥子繞自身軸的旋轉副和Mecanum 輪繞輪轂的旋轉副;用Impact函數模擬輥子與地面的碰撞,采用Coulomb 準則模擬輥子與地面的摩擦;在擺臂式懸掛端設置4 組彈簧阻尼器,通過設置剛度系數模擬不同的彈簧減震器。

圖10 某型機器人及底盤結構示意

圖11 運動學仿真模型
建立4 種坡道仿真路面,分別為直線行駛上坡、斜向行駛上坡、直線行駛下坡和斜向行駛下坡。由于篇幅所限,本文僅結合相對復雜的斜向行駛上坡工況的仿真結果及其影響因素進行分析和論證。
2.2 減震彈簧剛度的影響分析
根據前文分析,斜向坡道行駛過程中車輪發生瞬時離地時會產生橫向滑移,結合車體結構特點,懸掛減震的剛度系數會對離地幅度及離地時間產生影響,會直接影響運動過程的偏移量。
仿真工況為未加載配重質心居中的狀態,坡道傾角為5°、10°和15°,底盤采用直線運動控制模式,4 個車輪的轉速均為460 °/s,駛入坡道時的偏向角為10°,仿真時間6 s。
圖12 為彈簧剛度系數k=800 N/mm 時底盤在10°傾角坡道上的運動情況,從圖中可以看出與1.5 節中的分析一致,底盤在駛入及駛離坡道過程中個別車輪會出現瞬時離地現象,產生沿Y方向的橫向驅動力及由于驅動力不平衡產生的車體扭轉,由此造成在這2 個階段發生明顯的橫向滑移。在全坡道行駛階段,由于4 車車輪與地面接觸良好,運行狀態較為穩定,未發現明顯的偏移。

圖12 斜向坡道行駛軌跡示意(k=800 N/mm)
圖13 為設置不同減震剛度后,底盤在3 種傾角坡道上的偏移量曲線。

圖13 不同剛度系數橫向偏移量曲線
通過表1 可以看出,當剛度參數相同時,隨著坡道傾角的加大偏移量會隨之增大。在傾角5°的坡道上,偏移量呈現隨剛度線性變化的趨勢,但在10°和15°坡道上卻不存在該規律,偏移量較小的反而是剛度較大的兩種狀體。因此在較大傾角坡道上需要注意選擇1 個合適的剛度系數才有利于減小最大偏移量。

表1 不同剛度系數橫向偏移量數據表 mm
2.3 質心位置的影響
根據前文的分析,增加驅動輪部位的正壓力可以有效提高車輪的附著力Fφ,減少車輪空轉,提升底盤對牽引力的利用,從而提高運動的穩定性。因此通過調整質心位置,理論上可以減小坡道運行時的偏移量。
以2.2 中3 種坡道最大偏移狀態為基線,保證整體重量不變,通過調整前、后配重的方式將質心位置前移、后移80 mm。圖14 為彈簧剛度系數為k=1 000 N/mm,質心向后調整80 mm 的底盤在10 °傾角坡道上的運動情況。

圖14 斜向坡道行駛軌跡示意(質心靠后狀態)
圖15 為底盤在3 種傾角坡道上的偏移量曲線。

圖15 不同質心位置橫向偏移量曲線
從表2 中數據可以看出:質心前移后,在5°及10°傾角坡道上,均能減小一定的橫向偏移,但在15°坡道時卻出現較為嚴重的側滑而無法完成爬坡動作。與之不同的是質心后移狀態的底盤,側向偏移量明顯減低。因此對于本文分析中所采用的“O 型布局”麥克納姆輪底盤,質心后移更有利于提高坡道行駛過程中的運動穩定性,提升底盤的爬坡能力。

表2 不同質心位置橫向偏移量數據表 mm
2.4 偏向角的影響分析
根據前文的分析,當偏向角增大時橫向坡道阻力Fty也相應增大,也會對運動過程中的橫向偏移產生影響。以2.2 節中3 種坡道最大偏移狀態為基線,將偏向角從10°增大至15°。橫向偏移曲線如圖16 所示。

圖16 15°偏向角橫向偏移量曲線
從表3 中數據可以看出:偏向角增大后,橫向偏移量也會隨之增大,其中在2 種工況下出現較為嚴重的側滑,如圖17 所示,底盤無法爬坡。因此增大偏向角及選擇不合適的減震器會影響底盤的爬坡能力。

表3 不同偏向角橫向偏移量數據表 mm

圖17 斜向坡道行駛軌跡示意(嚴重橫向側滑狀態)
3 實物驗證試驗
采用某型機器人實物進行了實際路況下的斜向坡道行駛測試,坡道角度約10°,分別進行偏向角為10°和45°兩種情況進行試驗,提取機器人差分GPS 軌跡數據,并與前文仿真數據進行比對。圖18、19 為10°偏向角機器人樣機試驗圖和采集的位置曲線圖,樣機爬坡過程中運行較為平穩,未出現明顯的滑移,實物試驗位置曲線與仿真分析的曲線基本吻合;圖20、21 為45°偏向角機器人樣機試驗圖和采集的位置曲線圖,樣機在駛入坡道階段發生了較為明顯的側向滑移,未能完成爬坡動作,與仿真分析的結果基本一致。由于條件所限現場坡道并非標準角度坡道,在坡度、偏向角、地面平整度等方面與仿真的標準坡道存在一定差異,但通過試驗中實物的運行軌跡及變化規律可以看出,實物試驗和仿真分析的情況相吻合,驗證了前文理論分析的正確性。

圖18 10°偏向角坡道行駛試驗

圖19 10°偏向角坡道行駛位置曲線對比

圖20 45°偏向角坡道行駛試驗
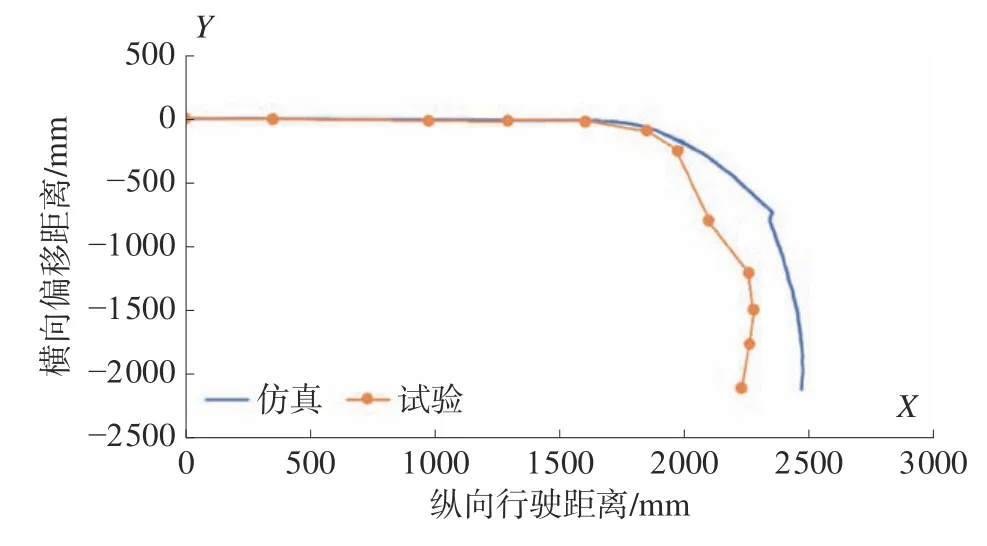
圖21 45 °偏向角坡道行駛位置曲線對比
4 結論
通過仿真分析和實物試驗測試可以看出,Mecanum 輪底盤在斜向坡道行駛中,尤其是大偏向角狀態下確實存在滑移現象。在一定偏向角范圍內,通過優化減震懸掛、調整質心位置等方式,能夠使其較為平穩地進行斜向坡道行駛。后續進一步結合運動控制算法優化,例如通過加裝IMU檢測底盤方位狀態并實時調整運動控制模式對運動偏移的趨勢進行修正,相信將進一步提升Mecanum 輪底盤對復雜路況下的適應能力。
猜你喜歡
現代畜牧科技(2021年9期)2021-10-13 06:39:14
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
當代經濟研究(2016年5期)2016-12-01 03:12:05
現代農業(2016年5期)2016-02-28 18:42:46
出版與印刷(2016年3期)2016-02-02 01:20:11
財經界(學術版)(2015年20期)2015-12-23 09:20:13
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
華北水利水電大學學報(社會科學版)(2014年3期)2014-04-16 04:38:31
