基于TOF的UWB可移動基站快速自定位算法
2021-12-02 04:58:06韓玉香張曉亮張曉明耿煜琛
導(dǎo)航定位與授時(shí) 2021年6期
關(guān)鍵詞:測量
韓玉香,張曉亮,張曉明,2,耿煜琛
(1.中北大學(xué)電子測試技術(shù)國家重點(diǎn)實(shí)驗(yàn)室,太原 030051; 2.中北大學(xué)儀器科學(xué)與動態(tài)測試教育部重點(diǎn)實(shí)驗(yàn)室,太原 030051; 3. 濟(jì)南金豐源電子科技有限公司,濟(jì)南 250101 )
0 引言
現(xiàn)如今,越來越多的高新技術(shù)被應(yīng)用到各體育運(yùn)動中,以更好地對運(yùn)動員的運(yùn)動狀況進(jìn)行分析[1-2]。其中,運(yùn)動場中運(yùn)動員的定位精度要求為分米級,更新率大于10Hz,可實(shí)時(shí)準(zhǔn)確顯示運(yùn)動員的運(yùn)動軌跡。目前常用的定位技術(shù)如超聲波定位技術(shù)[3]、藍(lán)牙定位技術(shù)[4]和WiFi定位技術(shù)[5]等,在覆蓋范圍及定位精度方面均不能滿足運(yùn)動場高精度實(shí)時(shí)定位的要求;全球?qū)Ш叫l(wèi)星系統(tǒng)(Global Navigation Satellite System, GNSS)[6-7]定位技術(shù)適合室外大范圍定位,單點(diǎn)定位精度低;實(shí)時(shí)動態(tài)定位(Real-Time Kinematic,RTK)技術(shù)雖可實(shí)現(xiàn)單點(diǎn)實(shí)時(shí)定位,但所需設(shè)備復(fù)雜,操作難度大。
超寬帶(Ultra Wide Band,UWB)定位技術(shù)由于功耗低、系統(tǒng)復(fù)雜度低、多徑分辨率高、系統(tǒng)安全性高、定位精度可達(dá)分米級[8-9]等優(yōu)點(diǎn),在室內(nèi)外定位領(lǐng)域得到了廣泛應(yīng)用[10]。傳統(tǒng)的UWB可移動基站定位方法借用外部設(shè)備(如高精度全站儀)進(jìn)行人工測量以獲取基站位置[11],雖然人工測量基站位置較為精確,但使用不便,需利用全站儀等工具進(jìn)行輔助測量,不但增加了使用成本,還導(dǎo)致UWB定位系統(tǒng)的基站布設(shè)工作量增加,限制了定位系統(tǒng)的可移動性[12]。除人工測量之外,還可以將移動基站定位在標(biāo)準(zhǔn)運(yùn)動場的場地邊緣,以運(yùn)動場的標(biāo)準(zhǔn)尺寸確定基站坐標(biāo)[13]。多數(shù)運(yùn)動場地在建設(shè)時(shí)不能達(dá)到標(biāo)準(zhǔn)尺寸要求,并且基站在安裝時(shí)可能與場地邊緣不完全重合,導(dǎo)致基站坐標(biāo)存在誤差。 因此,本文提出了一種可移動基站快速自定位方法。
為滿足運(yùn)動場中可移動基站快速定位的需求,利用基于飛行時(shí)間(Time of Flight,TOF)[14]的UWB可移動基站快速自定位方法,建立局部坐標(biāo)系以獲取基站坐標(biāo)。根據(jù)需要在運(yùn)動場中布設(shè)基站,通過各基站間互相通信即可快速定位基站的相對位置。該方法可減少定位基站的布設(shè)時(shí)間和成本,降低UWB移動定位基站的布設(shè)難度,提高系統(tǒng)的可移動性,達(dá)到快速精確確定運(yùn)動場可移動基站坐標(biāo)的目的。
1 定位算法
1.1 TOF測距原理(雙邊雙向測距)
假設(shè)運(yùn)動場內(nèi)有n個(gè)定位基站,任意2個(gè)基站之間均可進(jìn)行通信,為減小基站的時(shí)鐘誤差帶來的測距誤差,基站之間進(jìn)行雙向測距,如圖 1所示。雙邊雙向測距分為兩次測距:基站j主動發(fā)起第一次測距消息并記錄發(fā)送時(shí)間戳t0,基站i記錄接收時(shí)間戳t1并產(chǎn)生應(yīng)答信息,同時(shí)記錄發(fā)送時(shí)間戳t2,當(dāng)基站j收到數(shù)據(jù)之后記錄時(shí)間戳t3;第二次為基站j返回帶有時(shí)間戳t0、t3、t4的數(shù)據(jù),基站i接收并記錄時(shí)間戳t5。最終可以得到4個(gè)時(shí)間差,根據(jù)時(shí)間差計(jì)算基站i到基站j的距離[15]。
令4個(gè)時(shí)間差分別為
treply1=t2-t1treply2=t4-t3tround1=t3-t0tround2=t5-t2
tround1為基站j發(fā)送輪詢信號到接收到基站i應(yīng)答信號的時(shí)間;tround2為基站i發(fā)送應(yīng)答信號到接收到基站j發(fā)送的測距信息的時(shí)間;treply1為基站i接收到輪詢信號到發(fā)送應(yīng)答信號的時(shí)間;treply2為基站j接收到應(yīng)答信號到發(fā)送測距信息的時(shí)間。
則進(jìn)行一次測距所需時(shí)間t可表示為
(1)
根據(jù)式(1)可進(jìn)一步得出距離d
d=ct+Δd
(2)
其中,c為無線電傳播速度;Δd為TOF測距誤差。

圖1 TOF測距原理圖Fig.1 TOF ranging schematic diagram
1.2 基站快速定位原理
由于運(yùn)動場地面平坦,將地面定義為三維坐標(biāo)系的xoy平面。運(yùn)動場內(nèi)任意不同的2個(gè)基站作為基站1和基站2。基站1和基站2在地面投影點(diǎn)的連線定義為三維坐標(biāo)系的x軸,將經(jīng)過基站1的地面法線定義為三維坐標(biāo)系的z軸,根據(jù)右手定則,得到y(tǒng)軸方向。利用測量工具測得各基站到地面的距離作為z軸坐標(biāo),測量誤差在0.001m內(nèi)。不失一般性,假設(shè)基站均在xoy平面的第一象限內(nèi),如圖2所示。基站1的坐標(biāo)為(0,0,z1),基站2的坐標(biāo)為(x2,0,z2),基站i的坐標(biāo)為(xi,yi,zi),基站j的坐標(biāo)為(xj,yj,zj),則每2個(gè)基站之間的距離表示為
dij2=(xi-xj)2+(yi-yj)2+(zi-zj)2i=1,2,3,…,n;j=1,2,3,…,n;i≠j
(3)
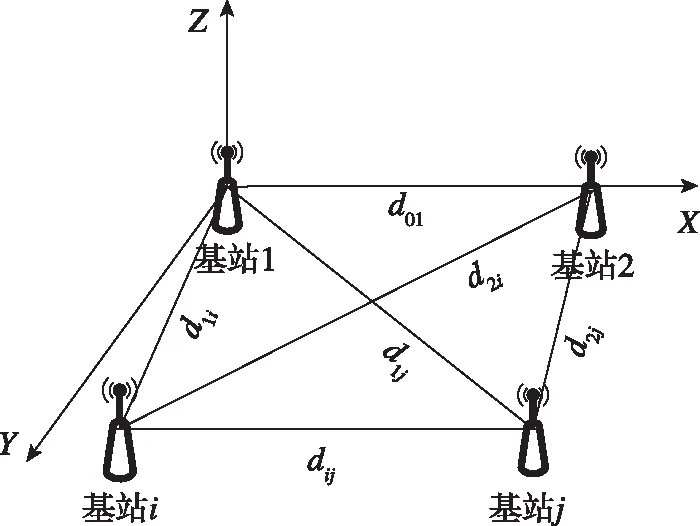
圖2 基站快速定位原理圖Fig.2 Schematic diagram of base station rapid positioning
根據(jù)式(3)可得關(guān)于距離及基站坐標(biāo)的非線性方程組,本文采用牛頓迭代法求解基站坐標(biāo)。假設(shè)Xk為第k次迭代的坐標(biāo)值,則
Xk=[x1k,x2k,y2k…xik,yik…xnk,ynk]T
對式(3)所得的非線性方程組進(jìn)行泰勒展開得
(4)
其中,Δxi=xi-xik,i=2,3,…,n;Δyi=yi-yik,i=3,4,…,n。
由文獻(xiàn)[16]以及實(shí)驗(yàn)數(shù)據(jù)可知,距離值的測量存在誤差且誤差服從正態(tài)分布。由數(shù)理統(tǒng)計(jì)知識:當(dāng)誤差服從正態(tài)分布時(shí),最小二乘是最優(yōu)線性無偏估計(jì)。通過最小二乘求解,使得測距誤差的平方和為最小。下文將通過上述泰勒展開式求方程的最小二乘解。
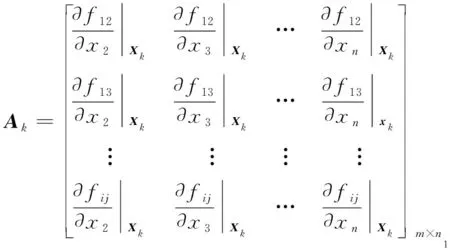
記系數(shù)矩陣Hk為
Hk=[Ak(m×n1)Bk(m×n2)]
其中
Xk迭代初始值由非線性方程組解得

(5)
其中

(6)
令各個(gè)基站到地面的距離差為Δz,則Δz可表示為
Δz={Δzij|1≤i≤n,1≤j≤n,i≠j}
令
ΔXk=[Δx2k,Δxik…Δxnk,Δy2k,Δyik…Δynk]T
令
ΔRk=f-fk
(7)
其中
f=[f12,f1i…fij]TXk=[x1,x2,…xi…xn,y2…yi…yn]Tfk=[f12|Xk,d1i|Xk…fij|Xk]T
則
ΔRk=HkΔXk
(8)
運(yùn)用最小二乘法解算ΔXk,得
(9)
第一次迭代的X1為
X1=ΔX+X0
(10)
通過牛頓迭代法對ΔXk進(jìn)行解算,當(dāng)ΔXk小于誤差閾值時(shí)停止迭代,此時(shí)的Xk+1為
Xk+1=Xk+ΔXk
(11)
最終基站x、y軸坐標(biāo)值為Xk+1,z軸坐標(biāo)值為基站和地面之間的距離,實(shí)現(xiàn)了基于TOF測距的UWB基站快速定位方式。
在設(shè)定的局部坐標(biāo)系內(nèi)求得基站坐標(biāo)后,在運(yùn)動場自身坐標(biāo)系x′o′y′以及建立的局部坐標(biāo)系xoy內(nèi)選取典型位置點(diǎn),求得坐標(biāo)轉(zhuǎn)換關(guān)系,將坐標(biāo)進(jìn)行平移旋轉(zhuǎn)即可得到基站在運(yùn)動場內(nèi)的坐標(biāo)。
2 定位誤差傳播規(guī)律
基站坐標(biāo)ΔXk的期望為
(12)
基站坐標(biāo)ΔXk的方差為
(13)

(14)
每個(gè)基站坐標(biāo)處的誤差系數(shù)可表示為

(15)
通過誤差系數(shù)及測距標(biāo)準(zhǔn)差,可進(jìn)一步得到基站x坐標(biāo)和y坐標(biāo)的標(biāo)準(zhǔn)差
誤差系數(shù)反映了測距誤差和定位誤差的關(guān)系。根據(jù)文獻(xiàn)[17],誤差系數(shù)與基站個(gè)數(shù)及基站布設(shè)方式有關(guān)。
3 仿真實(shí)驗(yàn)
假設(shè)UWB可移動基站的測距誤差服從均值為0、標(biāo)準(zhǔn)差為0.1m的正態(tài)分布。通過上述定位算法解算基站坐標(biāo),并進(jìn)行誤差系數(shù)及標(biāo)準(zhǔn)差計(jì)算,分析布設(shè)數(shù)目分別為4、6、8時(shí),對UWB可移動基站自定位精度的影響。

表1 基站坐標(biāo)仿真數(shù)據(jù)(4個(gè)基站)
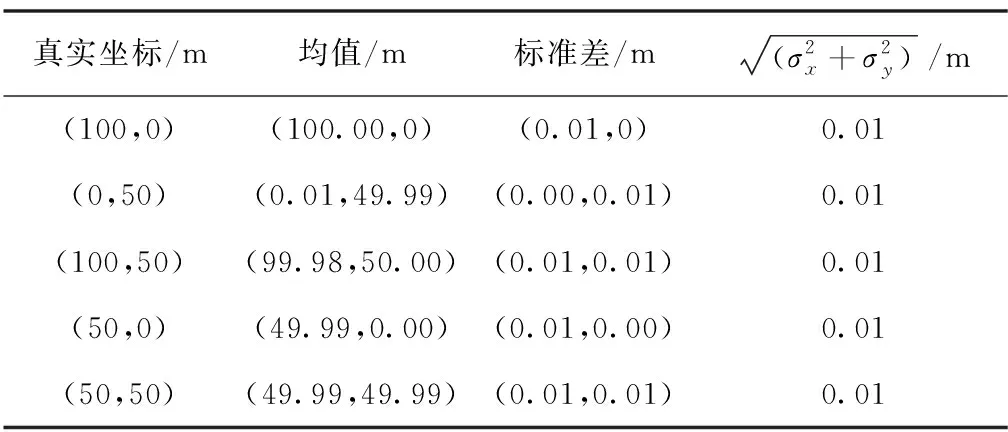
表2 基站坐標(biāo)仿真數(shù)據(jù)(6個(gè)基站)

表3 基站坐標(biāo)仿真數(shù)據(jù)(8個(gè)基站)
3組仿真實(shí)驗(yàn)結(jié)果表明,基站數(shù)目多的一組相較于基站數(shù)目少的一組,測量誤差及標(biāo)準(zhǔn)差均減小。在100m×50m區(qū)域內(nèi),布設(shè)6個(gè)UWB可移動基站時(shí),誤差均值及標(biāo)準(zhǔn)差均在誤差可接受范圍內(nèi)。布設(shè)8個(gè)UWB可移動基站時(shí),相對于6個(gè)基站布設(shè)情況,誤差標(biāo)準(zhǔn)差有所減少,但是減小效果不明顯。在100m×50m區(qū)域內(nèi),布設(shè)6個(gè)基站即可達(dá)到理想定位精度,繼續(xù)增加基站數(shù)目,定位精度的提高效果并不明顯,同時(shí)提高了系統(tǒng)復(fù)雜度,使得定位速度變慢。因此,在長為100m、寬為50m的運(yùn)動場內(nèi),布設(shè)6個(gè)UWB基站即可達(dá)到精確定位的目的。
以6個(gè)基站布局仿真圖中(50,0)為例,測量坐標(biāo)的誤差情況如圖3所示。

圖3 仿真結(jié)果與實(shí)際位置對比效果Fig.3 Comparison between simulation results and actual position
4 運(yùn)動場實(shí)驗(yàn)
仿真結(jié)果表明,100m×50m的運(yùn)動場內(nèi)6個(gè)UWB基站及8個(gè)UWB基站均可達(dá)到精確定位的目的。考慮到運(yùn)動場定位精度的要求,采用仿真實(shí)驗(yàn)中6個(gè)UWB基站的布局方式驗(yàn)證算法的可行性。在足球場布設(shè)基站,用全站儀進(jìn)行測量,全站儀測量精度為0.001m,如圖4所示。基站1坐標(biāo)為(0,0,1),測得其余5個(gè)基站坐標(biāo)情況如表4所示。6個(gè)UWB基站完成一次定位用時(shí)小于1s,可達(dá)到快速定位的目的。

圖4 基站布設(shè)環(huán)境Fig.4 Layout environment of base station
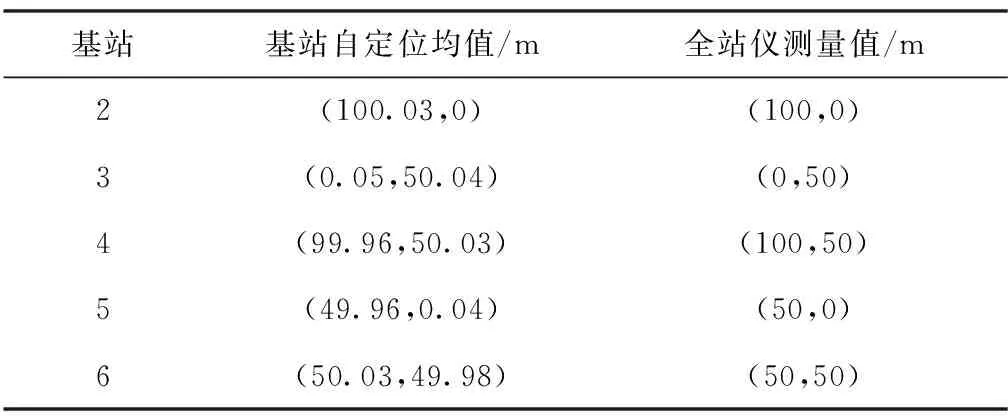
表4 運(yùn)動場基站坐標(biāo)數(shù)據(jù)
實(shí)驗(yàn)結(jié)果表明,基于該算法的UWB移動基站自定位結(jié)果與全站儀的標(biāo)定結(jié)果相比,坐標(biāo)相對誤差最大為0.05m,因此基站的自定位結(jié)果準(zhǔn)確。
5 結(jié)論
本文提出了一種基于TOF的UWB可移動基站快速自定位方法。
1)通過最小二乘法及牛頓迭代法對算法進(jìn)行了誤差傳播規(guī)律的推導(dǎo);通過室外運(yùn)動場定位實(shí)驗(yàn)進(jìn)行算法的可行性驗(yàn)證,定位結(jié)果表明,可移動基站的定位精度在0.05m以內(nèi)。
2)相對于人工測量基站的位置,本文算法不需要借助高精度儀器輔助測量,大大節(jié)省了基站布設(shè)時(shí)間,解決了傳統(tǒng)的UWB可移動基站布設(shè)復(fù)雜、成本高等方面的問題。
3)本文算法利用所有可移動基站互相通信的方式,采用最小二乘法求解,可實(shí)現(xiàn)誤差補(bǔ)償。通過對誤差傳遞系數(shù)的分析,該算法在誤差傳遞過程中,可減小測距誤差對測量結(jié)果的影響,提高了定位結(jié)果的準(zhǔn)確度。該算法可實(shí)現(xiàn)運(yùn)動場內(nèi)運(yùn)動員的三維定位,適用于UWB定位等無線定位技術(shù)中局部定位系統(tǒng)的組建,具有很強(qiáng)的指導(dǎo)意義和使用價(jià)值。
猜你喜歡
小學(xué)科學(xué)(學(xué)生版)(2021年5期)2021-07-22 02:40:06
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學(xué)少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學(xué)少年(2017年2期)2017-04-26 21:58:43
中學(xué)生數(shù)理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學(xué)低年級版)(2015年4期)2015-04-29 00:00:00
