一種基于模觀測法的離心機(jī)加速度計(jì)組合標(biāo)定方法研究
2021-12-02 04:58:08王世明李夢真
導(dǎo)航定位與授時(shí) 2021年6期
王世明,李夢真
(天津科技大學(xué)電子信息與自動(dòng)化學(xué)院,天津 300222)
0 引言
加速度計(jì)在慣性導(dǎo)航系統(tǒng)中處于核心地位,用于精確給出運(yùn)載體相應(yīng)的位置信息。因此,提高加速度計(jì)的標(biāo)定精度是提高慣導(dǎo)系統(tǒng)導(dǎo)航精度的必要條件[1]。目前,針對(duì)慣導(dǎo)系統(tǒng)中加速度計(jì)的標(biāo)定方法主要為分立法且大部分在重力場下進(jìn)行,通過在拆卸安裝儀表的過程中引入安裝誤差角來影響標(biāo)定精度;重力場下可提供加速度計(jì)的最大輸入比力為1g,不足以有效激勵(lì)加速度計(jì)的高階項(xiàng)誤差參數(shù),不滿足高加速度飛行的導(dǎo)航條件[2-4]。因此,大激勵(lì)且整體標(biāo)定加速度計(jì)是慣性儀表標(biāo)定研究的主流。
整體法標(biāo)定旨在標(biāo)定加速度計(jì)組合全部誤差模型系數(shù)的同時(shí),降低測試設(shè)備誤差對(duì)系數(shù)標(biāo)定精度的影響。荷蘭學(xué)者J.C.L?tters等[5]提出了一種利用模觀測標(biāo)定方法很好地解決過度依賴轉(zhuǎn)臺(tái)的問題,大大降低了轉(zhuǎn)臺(tái)誤差對(duì)誤差模型系數(shù)標(biāo)定結(jié)果的影響;董春梅等[6]在此基礎(chǔ)上利用模觀測法在重力場下標(biāo)定了單一陀螺儀和加速度計(jì)的零偏、一階標(biāo)度因數(shù),重點(diǎn)分離了安裝誤差在標(biāo)定過程中的影響;戴邵武等[7]將導(dǎo)航姿態(tài)解算引入微慣性測量單元(Micro Inertial Measurement Unit,MIMU)的標(biāo)定中,提出了在MIMU轉(zhuǎn)動(dòng)過程中采用四元數(shù)進(jìn)行姿態(tài)解算,靜止時(shí)列寫MIMU標(biāo)定模觀測非線性方程的方法,實(shí)現(xiàn)了待標(biāo)定參數(shù)的完全激勵(lì),并將基于Logistic函數(shù)的改進(jìn)粒子群優(yōu)化(Particle Sw-arm Optimization,PSO)算法應(yīng)用于MIMU的標(biāo)定;王世明等[8]引入了一種無轉(zhuǎn)臺(tái)標(biāo)定中高精度慣導(dǎo)系統(tǒng)的方法,依據(jù)正交軸上加速度計(jì)輸出的矢量和等于重力的原理,標(biāo)定出加速度計(jì)輸出模型中的相關(guān)參數(shù);張紅良等[9]推導(dǎo)了基于高精度轉(zhuǎn)臺(tái)的慣性測量單元(Inertial Measurement Unit,IMU)標(biāo)定方法的誤差解析式,提出了一種抑制轉(zhuǎn)臺(tái)誤差的標(biāo)定編排改進(jìn)方案,建立了IMU標(biāo)定參數(shù)模型,并研究了靜態(tài)多位置IMU模觀測標(biāo)定方法。上述模觀測法仍在重力靜力場或轉(zhuǎn)臺(tái)低轉(zhuǎn)速模式下進(jìn)行研究,誤差模型中不包含高次項(xiàng)系數(shù),無法適應(yīng)慣導(dǎo)系統(tǒng)高加速度飛行的應(yīng)用環(huán)境。
精密離心機(jī)能夠持續(xù)提供大于1g的高精確度的加速度,通常用于辨識(shí)加速度計(jì)的高階系數(shù)模型[10-11],為得到帶有高階項(xiàng)的加速度計(jì)系數(shù)模型奠定了良好的基礎(chǔ)。但是,標(biāo)定方法的差異對(duì)標(biāo)定精度產(chǎn)生了一定的影響,實(shí)際標(biāo)定過程中常需要設(shè)計(jì)相應(yīng)的測試方法[12-14]對(duì)其產(chǎn)生的誤差進(jìn)行補(bǔ)償、規(guī)避、抑制甚至消除。
基于模觀測法的標(biāo)定思想,以高速旋轉(zhuǎn)的精密離心機(jī)作為標(biāo)定設(shè)備,研究加速度計(jì)組合的整體標(biāo)定方法,重點(diǎn)研究模觀測法對(duì)加速度計(jì)二次項(xiàng)系數(shù)的標(biāo)定原理,借助Tylor級(jí)數(shù)展開和最小二乘法[15-16]等數(shù)學(xué)方法,給出誤差模型系數(shù)標(biāo)定結(jié)果的數(shù)學(xué)表達(dá),同時(shí)考慮安裝誤差角和桿臂誤差對(duì)標(biāo)定結(jié)果精度的影響,為提高慣性組合標(biāo)定精度打下基礎(chǔ)。
1 標(biāo)定設(shè)備
為準(zhǔn)確標(biāo)定各項(xiàng)系數(shù),選用帶有反轉(zhuǎn)平臺(tái)的高精度離心機(jī)作為標(biāo)定設(shè)備,建立此系統(tǒng)的坐標(biāo)系及結(jié)構(gòu)圖如圖1所示。此系統(tǒng)的地理(主軸)坐標(biāo)系為OnXnYnZn,主軸軸套坐標(biāo)系為O0X0Y0Z0,水平軸坐標(biāo)系為O2X2Y2Z2,水平軸軸套坐標(biāo)系為O2tX2tY2tZ2t。
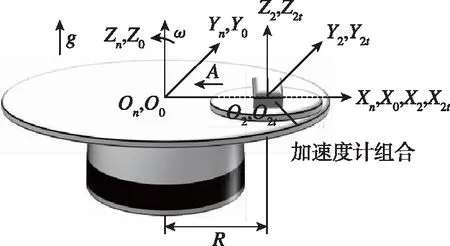
圖1 加速度計(jì)組合結(jié)構(gòu)示意圖Fig.1 Schematic diagram of inertial assembly structure for centrifuge calibration
加速度計(jì)組合內(nèi)部加速度計(jì)各軸的取向如圖2所示。

圖2 加速度計(jì)組合內(nèi)部示意圖 Fig.2 Internal schematic diagram of accelerometer combination
2 標(biāo)定設(shè)備離心機(jī)模觀測法標(biāo)定原理
IMU在重力場靜態(tài)條件下的輸入比力滿足[7]
(1)
應(yīng)用模觀測法,對(duì)式(1)兩邊分別取模,得
(2)

類似地,在離心機(jī)上進(jìn)行加速度計(jì)標(biāo)定時(shí)輸入比力滿足
(3)

應(yīng)用模觀測法,對(duì)式(3)兩邊分別取模,得
(4)
由式(4)可知,在離心機(jī)標(biāo)定加速度計(jì)組合時(shí),3個(gè)方向加速度計(jì)輸入比力的合成等于向心加速度和重力加速度的合成,可用式(5)進(jìn)一步表示
(5)
其中,A=ω2R,ω為離心機(jī)旋轉(zhuǎn)角速度,R為半徑標(biāo)稱值。
由于加速度計(jì)的輸出值與輸入比力正相關(guān)。因此,只要獲得加速度計(jì)輸出值,就可以通過取模的方式構(gòu)建辨識(shí)加速度計(jì)誤差模型系數(shù)的條件。
3 加速度計(jì)的模型
考慮一階及二階誤差模型系數(shù),則加速度計(jì)的誤差模型如式(6)所示
Na=Ka[fb+Da(fb)2]+ba+na
(6)
其中,Ka=SaΦa,代入即可建立加速度計(jì)的誤差模型分解形式
SaΦa[fb+Da(fb)2]=(Na-ba-na)
(7)
Naz]T為加速度計(jì)輸出值;ba=[baxbaybaz]T為零偏;na=[naxnaynaz]T為測量誤差。
4 模觀測法標(biāo)定加速度計(jì)組合方法
對(duì)式(7)進(jìn)行化簡,并忽略高階無窮小項(xiàng),可得
(8)
式中
(9)
式(8)為3個(gè)加速度計(jì)輸入比力的二元一次方程,利用求根公式并根據(jù)輸入比力的值為正,舍去數(shù)值為負(fù)的一項(xiàng),計(jì)算輸入比力的表達(dá)式為
(10)
從式(10)可知,3個(gè)加速度計(jì)的輸入比力與(1-4DaΔ)0.5相關(guān),該項(xiàng)表達(dá)式在參數(shù)辨識(shí)過程中不易于參數(shù)分離,因此考慮將式(10)用Tylor級(jí)數(shù)展開式展開。通過數(shù)值仿真可知,Tylor級(jí)數(shù)展開至第二項(xiàng)后,輸入比力的誤差與真值偏差小于10-4量級(jí),滿足加速度計(jì)輸出精度要求,故以展開至二次項(xiàng)系數(shù)為輸入比力關(guān)系表達(dá)式,可得
(11)
若以g為計(jì)量單位,將式(11)代入式(5)中,忽略高階無窮小項(xiàng),同時(shí)忽略安裝誤差角的影響,可得
(12)

(13)
式中
(14)
根據(jù)式(13)可知,若標(biāo)定過程中給予加速度計(jì)組合不同的測試位置,則可以獲得若干個(gè)加速度計(jì)的輸出,通常測試位置數(shù)N≥4n+2,n為擬辨識(shí)系數(shù)個(gè)數(shù)。式(13)中,C為待辨識(shí)參數(shù),共13項(xiàng),故測試位置數(shù)N至少為54個(gè)。則可得出N個(gè)方程,可表示為
(15)
式中

進(jìn)而利用最小二乘法,可得13項(xiàng)待辨識(shí)參數(shù)的計(jì)算公式為
(16)
通過觀察式(15)系數(shù)之間的關(guān)系,可知
(17)

(18)
則可解得
(19)
進(jìn)而可求得3個(gè)加速度計(jì)的標(biāo)度因數(shù)為
(20)
3個(gè)加速度計(jì)的二次項(xiàng)系數(shù)為
(21)
3個(gè)加速度計(jì)的零偏為
(22)
至此,誤差模型(5)中的待標(biāo)定系數(shù)的表達(dá)式如式(20)~式(22)所示。實(shí)際標(biāo)定過程中,通過設(shè)定多位置,采集3個(gè)加速度計(jì)在不同位置的輸出,按照式(16)~式(22)的計(jì)算過程即可完成對(duì)加速度計(jì)組合的整體標(biāo)定,特別實(shí)現(xiàn)了模觀測法對(duì)加速度計(jì)二次項(xiàng)系數(shù)的標(biāo)定。
5 實(shí)驗(yàn)仿真與誤差分析
設(shè)置仿真條件:假設(shè)如圖1所示離心機(jī)標(biāo)稱半徑為1m,g為9.8 m/s2,實(shí)驗(yàn)當(dāng)?shù)鼐暥葹楸本?9°。
擬選用的加速度計(jì)標(biāo)度因數(shù)分別為
Sax=1.29,Say=1.21 ,Saz=1.26
加速度計(jì)零偏分別為
bax=0.213g,bay=0.256g,baz=0.516g
加速度計(jì)二次項(xiàng)系數(shù)分別為
Dax=0.57 ×10-4g/g2,Day=0.31×10-4g/g2,Daz=0.45×10-4g/g2
加速度計(jì)測量噪聲為10-5V 。采集測試位置數(shù)N為60個(gè),此時(shí)N>54,故滿足要求。加速度計(jì)的三軸轉(zhuǎn)向具體示意圖如圖3所示,仿真過程中各加速度計(jì)具體輸出如表1所示。
根據(jù)式(8)~式(22),在不考慮安裝誤差角和桿臂誤差的情況下,可得出3個(gè)加速度計(jì)零偏、標(biāo)度因數(shù)以及二次項(xiàng)系數(shù)的具體數(shù)值。仿真標(biāo)定結(jié)果如表2所示。


圖3 20位置下3個(gè)加速度計(jì)的輸入軸指向示意圖Fig.3 Schematic diagram of the input axis of the three accelerometers at 20 positions
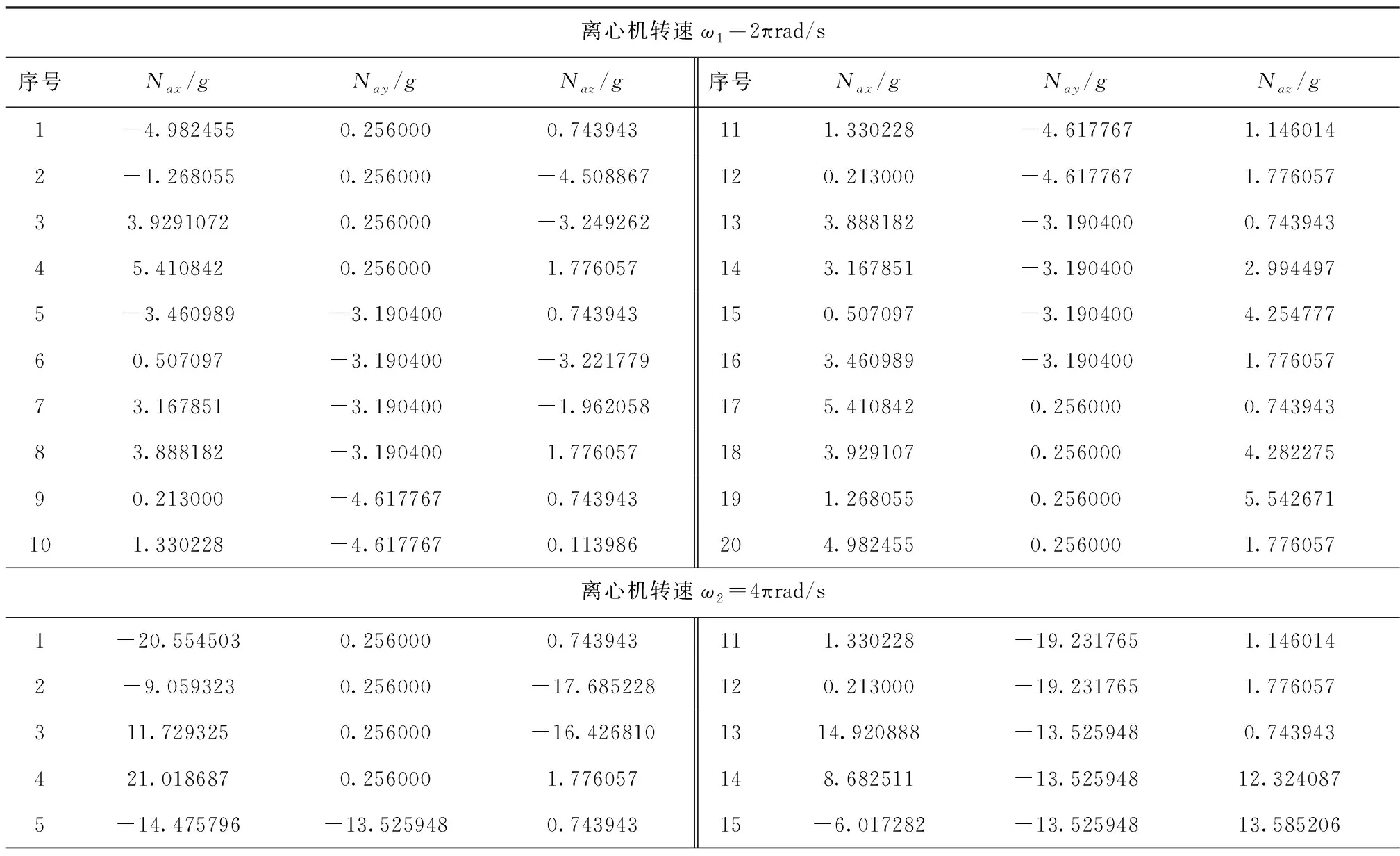
表1 20位置下3個(gè)加速度計(jì)不同離心機(jī)轉(zhuǎn)速下的實(shí)際輸出
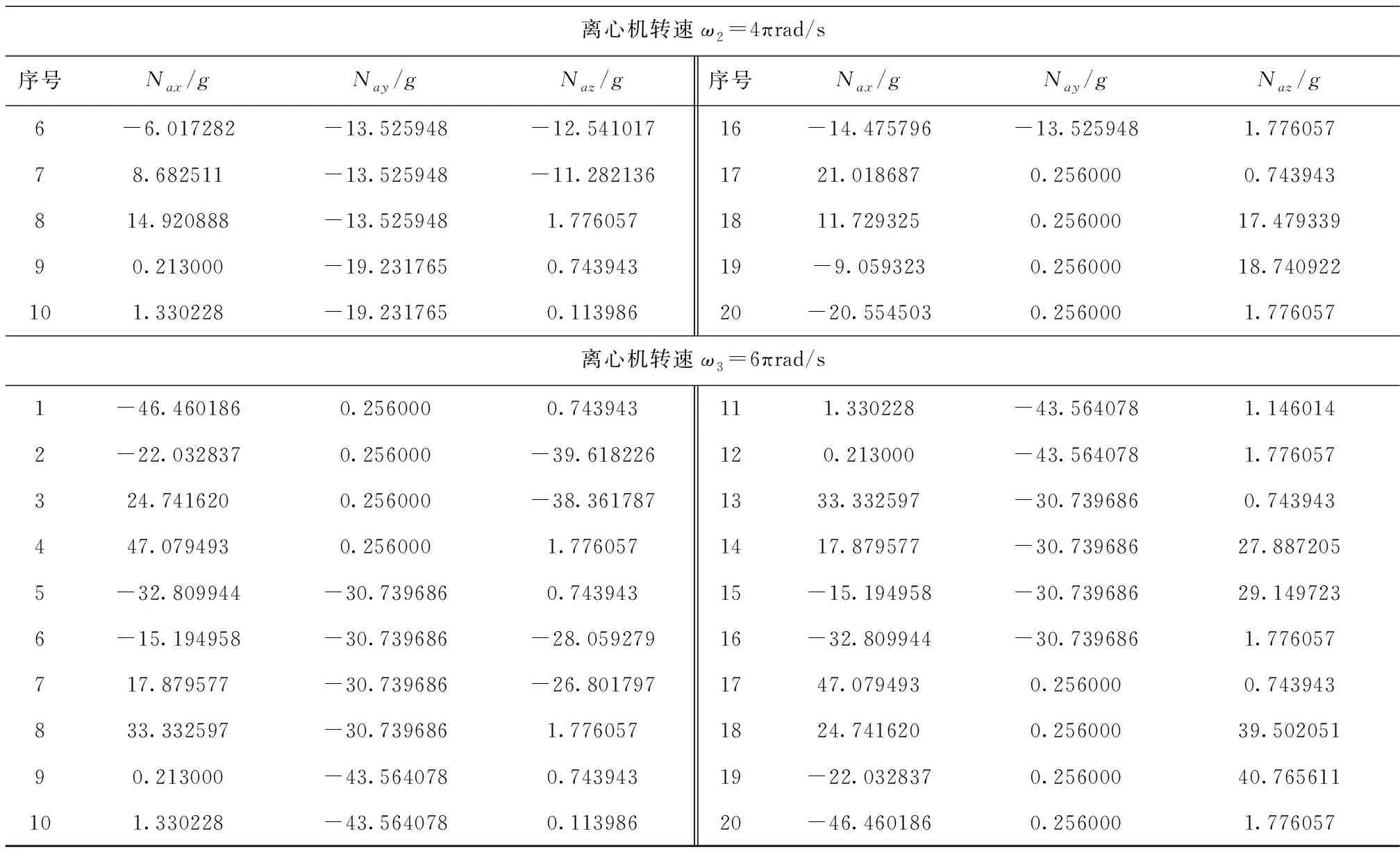
續(xù)表

表2 仿真標(biāo)定結(jié)果(不考慮安裝誤差與桿臂誤差)
1)考慮安裝誤差角
將式(9)代入式(10)~式(12)中,可得帶誤差項(xiàng)且校正過的輸入比力表達(dá)式,如式(23)所示
(23)
其中

由此可知,安裝誤差角主要影響式(14)中的C11、C12和C13項(xiàng),而應(yīng)用式(17)~式(22)計(jì)算各誤差模型系數(shù)時(shí)對(duì)各系數(shù)標(biāo)定結(jié)果均有影響。設(shè)3個(gè)加速度計(jì)安裝誤差角的變化范圍從2×10-4rad~10×10-4rad,計(jì)算安裝誤差角對(duì)標(biāo)度因數(shù)、二次項(xiàng)系數(shù)以及零偏的影響,如圖4所示。
由圖4中可知,隨著安裝誤差角的增大,其對(duì)所有誤差模型系數(shù)標(biāo)定精度的影響也隨之增大。其中,誤差角的存在對(duì)3個(gè)加速度計(jì)的標(biāo)度因數(shù)影響最大,對(duì)零偏的影響次之,對(duì)二次項(xiàng)系數(shù)的影響最小。從影響大小的角度分析,安裝誤差角的影響遠(yuǎn)小于誤差模型系數(shù)的精度要求。因此,實(shí)際標(biāo)定過程中,可以忽略安裝誤差角對(duì)誤差模型系數(shù)標(biāo)定精度的影響。
2)考慮桿臂誤差

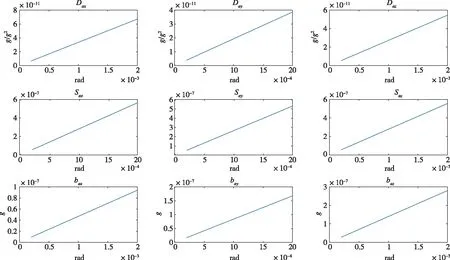
圖4 安裝誤差角對(duì)于二次項(xiàng)系數(shù)、標(biāo)度因數(shù)和零偏的影響Fig.4 The influence of installation misalignment on quadratic term coefficient, scale factor and bias
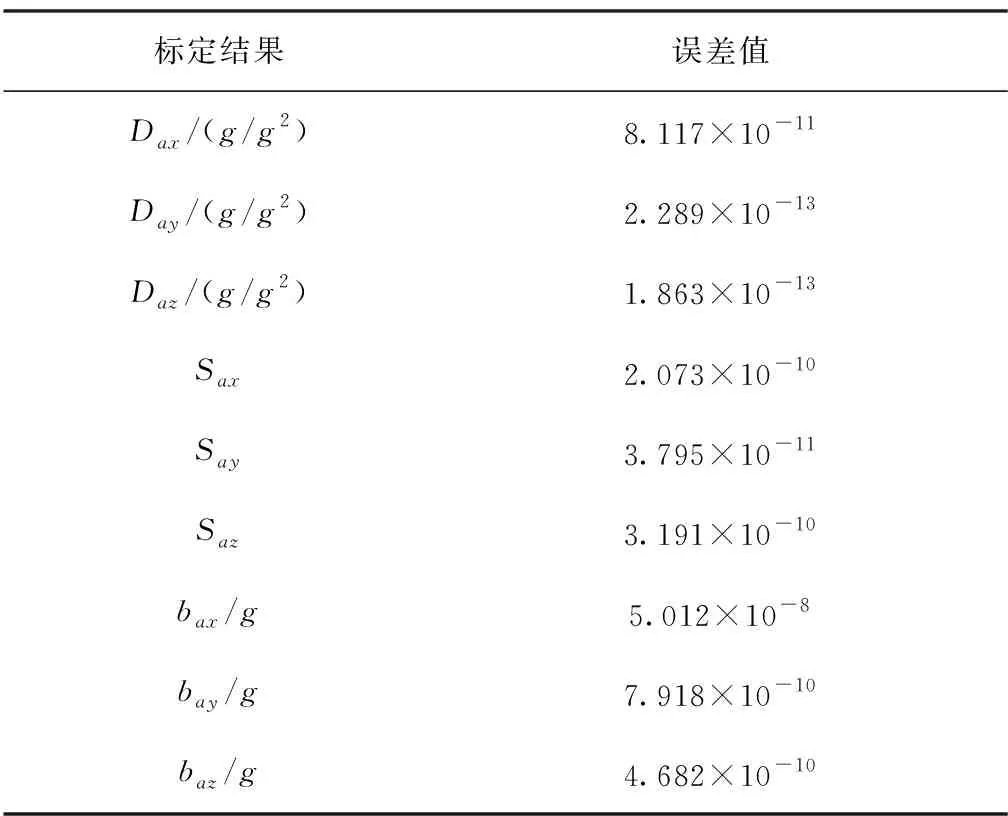
表3 桿臂誤差對(duì)誤差模型系數(shù)的影響
由表3可知,在標(biāo)定誤差系數(shù)時(shí),桿臂誤差對(duì)3個(gè)加速度計(jì)的零偏系數(shù)、標(biāo)度因數(shù)和二次項(xiàng)系數(shù)都會(huì)產(chǎn)生一定的影響。其中,對(duì)加速度計(jì)A的誤差模型系數(shù)影響相對(duì)較大。從影響大小的角度分析,桿臂誤差的影響遠(yuǎn)小于誤差模型系數(shù)的精度要求。
綜上,安裝誤差角與桿臂誤差對(duì)加速度計(jì)誤差模型系數(shù)標(biāo)定的影響很小,實(shí)際標(biāo)定過程中可以忽略。
6 結(jié)論
采用模觀測法的標(biāo)定思想,以精密離心機(jī)作為標(biāo)定設(shè)備,實(shí)現(xiàn)了對(duì)加速度計(jì)組合的整體標(biāo)定,重點(diǎn)實(shí)現(xiàn)了對(duì)加速度計(jì)二次項(xiàng)系數(shù)的標(biāo)定,通過仿真驗(yàn)證了該方法的有效性。其創(chuàng)新性在于:
1)應(yīng)用Tylor級(jí)數(shù)對(duì)加速度模型的解進(jìn)行多項(xiàng)式展開,并利用最小二乘法實(shí)現(xiàn)了模觀測對(duì)非線性系數(shù)的標(biāo)定,給出了加速度計(jì)的二次項(xiàng)系數(shù)、標(biāo)度因數(shù)以及零偏的計(jì)算公式。
2)設(shè)計(jì)了20位置法標(biāo)定加速度計(jì)組合誤差模型系數(shù),通過仿真驗(yàn)證了該方法的有效性。
3)分析了安裝誤差角和桿臂誤差對(duì)誤差模型系數(shù)的影響,仿真驗(yàn)證了安裝誤差角和桿臂誤差對(duì)誤差模型系數(shù)標(biāo)定的影響很小,實(shí)際標(biāo)定過程中可以忽略。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2022年3期)2022-03-16 05:55:08
當(dāng)代陜西(2021年2期)2021-03-29 07:41:24
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
媽媽寶寶(2017年3期)2017-02-21 01:22:28
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
中國塑料(2016年3期)2016-06-15 20:30:00
通信電源技術(shù)(2016年3期)2016-03-26 07:13:38
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
