面向聲源定位的改進廣義互相關(guān)時延估計方法
2021-12-02 04:58:06屈順彪蘆竹茂王晨光
導(dǎo)航定位與授時 2021年6期
關(guān)鍵詞:信號
屈順彪,俞 華,蘆竹茂,申 沖,韓 鈺,王晨光
(1. 中北大學(xué)儀器科學(xué)與動態(tài)測試教育部重點實驗室,太原 030051; 2. 國網(wǎng)山西省電力公司電力科學(xué)研究院,太原 030001; 3. 中北大學(xué)信息與通信工程學(xué)院,太原 030051;4.中北大學(xué)儀器與電子學(xué)院,太原 030051)
0 引言
隨著現(xiàn)代信號處理技術(shù)的發(fā)展,當(dāng)前基于麥克風(fēng)陣列的聲源定位方法采用麥克風(fēng)陣列拾取聲源信號,再經(jīng)過一系列語音處理手段完成聲源的定位操作,在無人機定位和工業(yè)設(shè)備故障監(jiān)測方面都有著廣泛的用途。因此,該技術(shù)越來越受到國內(nèi)外相關(guān)企業(yè)、科研院所及高校的關(guān)注。文獻[1]中提出了一種基于相位變換的廣義互相關(guān)函數(shù)的聲源定位算法。該算法采用7個麥克風(fēng)接收聲源信號,并對接收到的信號進行濾波、加窗、譜減和倒譜等預(yù)處理,得到純語音信號,通過計算純語音信號的廣義互相關(guān)函數(shù)的相位變換,從而得到接收信號的時延估計值,再利用到達時間差算法和坐標(biāo)旋轉(zhuǎn)數(shù)字計算機算法計算方位角、俯仰角和距離以確定聲源方位。文獻[2]中提出了一種廣義交叉功率譜算法來濾除卷積干擾,通過對采樣信號進行白化處理,并根據(jù)信噪比變化調(diào)整交叉功率譜算法的加權(quán)值以提高抗噪和抗卷積性能,與傳統(tǒng)的廣義互功率譜算法相比,能夠克服混響和噪聲的卷積干擾,銳化峰值,從而準(zhǔn)確估計出信號的時延。
當(dāng)前基于麥克風(fēng)陣列的聲源定位主要通過三類算法模型實現(xiàn),分別是高分辨率譜估計方法[3]、可控波束形成方法[4]和基于到達時間差的時延估計方法[5]。其中高分辨率譜估計方法通過計算各個陣元的相關(guān)矩陣,獲取不同參數(shù)下的子空間,進而求取聲源的方位信息;可控波束形成方法通過對采集的信號計算加權(quán)和得到波束,然后改變麥克風(fēng)陣列接收信號的方向并計算信號的功率,不斷搜索得到輸出功率最大的波束方向,該方向即為所求的聲源方位;基于到達時間差的時延估計方法主要分為兩步實現(xiàn),首先是估算同一聲源到達陣列中不同麥克風(fēng)之間的時間差,其次再根據(jù)該差值求解聲源到達各個麥克風(fēng)之間的距離,最后再利用求解幾何的方法確定聲源的方位[6-8]。相較于前兩種方法,該方法計算量較小,實時性較高,在麥克風(fēng)聲源定位系統(tǒng)中被廣泛采用。
在傳統(tǒng)的麥克風(fēng)聲源定位系統(tǒng)中大多采用模擬麥克風(fēng)作為聲傳感器,為保證信號的穩(wěn)定可靠,需要設(shè)計復(fù)雜的信號調(diào)理電路[7],以完成信號的濾波及放大等預(yù)處理,這都將增加系統(tǒng)的復(fù)雜度。因此本文采用數(shù)字微機電系統(tǒng)(Micro-Electro-Mechanical System,MEMS)麥克風(fēng)作為聲傳感器,由于該型傳感器直接輸出數(shù)字量的脈沖密度調(diào)制(Pulse Density Modulation,PDM)信號,因此具有很強的抗干擾性,且不需要再設(shè)計外圍信號調(diào)理電路。對于時延估計過程中環(huán)境噪聲干擾導(dǎo)致時延估計誤差增大的問題,本文在傳統(tǒng)的廣義互相關(guān)方法的基礎(chǔ)上,通過改進PHAT加權(quán)函數(shù)進一步提高其抗噪能力,從而提高時延估計的精度,最后再通過實驗驗證了該方法的可靠性[9-10]。
1 麥克風(fēng)陣列定位系統(tǒng)設(shè)計
1.1 麥克風(fēng)陣列電路的設(shè)計
本設(shè)計中采用鈺太科技推出的型號為ZTS6032的數(shù)字MEMS麥克風(fēng),該型傳感器輸出數(shù)據(jù)為1bit的PDM信號,具有很強的抗干擾能力,工作電壓范圍為2.4~3.3V,工作電流為500μA,其麥克風(fēng)陣列的電路設(shè)計如圖1所示。將現(xiàn)場可編程邏輯門陣列(Field Programmable Gate Array,F(xiàn)PGA)的IO端口分別和麥克風(fēng)的時鐘引腳以及數(shù)據(jù)引腳相連,F(xiàn)PGA提供給4路麥克風(fēng)正常工作所需要的4路同步時鐘信號,保證輸出的PDM數(shù)據(jù)和輸入的時鐘信號同步,F(xiàn)PGA將采集到的4路麥克風(fēng)數(shù)據(jù)在先進先出(First Input First Output,F(xiàn)IFO)模塊中進行簡單的處理后,等待寫入DDR3 SDRAM中緩存。

圖1 麥克風(fēng)陣列電路工作示意圖Fig.1 Schematic diagram of microphone array circuit
1.2 麥克風(fēng)數(shù)據(jù)采集系統(tǒng)的設(shè)計
在電路工作過程中,F(xiàn)PGA同步控制4路MEMS麥克風(fēng)進行聲源信號的同步采集,設(shè)置一幀信號的采集時長為10s,即一幀數(shù)據(jù)的數(shù)據(jù)量為2.86MB。采集的大量數(shù)據(jù)先經(jīng)由FPGA進行緩存處理,由于MEMS數(shù)字麥克風(fēng)的工作時鐘和DDR3 SDRAM的工作時鐘不一致,因此分別設(shè)置2個FIFO用作數(shù)據(jù)的中間緩沖。FIFO的數(shù)據(jù)位寬設(shè)置為128bit,深度為512,將每個麥克風(fēng)輸出的1bit PDM數(shù)據(jù)聯(lián)合組成一個16字節(jié)的數(shù)據(jù),再通過寫FIFO模塊寫入DDR3 SDRAM中緩存等待以太網(wǎng)的發(fā)送,數(shù)據(jù)采集系統(tǒng)的整體架構(gòu)如圖2所示。
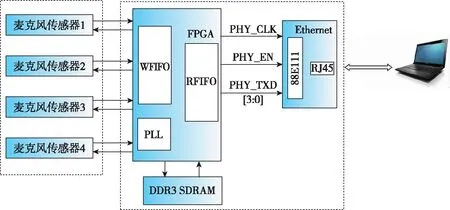
圖2 多通道麥克風(fēng)陣列數(shù)據(jù)采集系統(tǒng)Fig.2 Multi-channel microphone array data acquisition system
使用Xilinx的Vivado軟件開發(fā)平臺自帶的內(nèi)部邏輯分析儀可實時抓取到FPGA同步采集的4路麥克風(fēng)輸出的PDM數(shù)據(jù),其結(jié)果如圖3所示。

圖3 同步采集4路麥克風(fēng)輸出的PDM數(shù)據(jù)Fig.3 Simultaneous collection of PDM data from four microphones
2 麥克風(fēng)輸出的PDM信號解碼
2.1 CIC抽取濾波器的設(shè)計
ZTS6032型數(shù)字MEMS麥克風(fēng)輸出信號采用PDM信號編碼,傳感器輸出信號的幅值由多個脈沖的平均值決定。由于輸出的PDM信號采用過采樣技術(shù),因此在數(shù)據(jù)解碼過程中首先需要降低信號的采樣頻率以降低硬件系統(tǒng)的功耗,這里選擇使用Q級CIC(Cascade Integrator Comb)濾波器級聯(lián)的方式降低系統(tǒng)的采樣頻率。CIC濾波器由積分器和微分器共同組成,積分器是單極點的IIR(Infinite Impulse Response)濾波器,微分器是對稱的 FIR (Fi-nite Impulse Response)濾波器,其各自的傳遞函數(shù)和CIC濾波器的傳遞函數(shù)分別為式(1)和式(2)
(1)
|H(z)|=HI(z)QHc(z)Q
(2)
將z=ejω代入系統(tǒng)函數(shù)H(z), 最終可得
(3)
其中,D為降采樣倍數(shù),Q為濾波器級聯(lián)級數(shù),CIC濾波器的系統(tǒng)函數(shù)由D和Q唯一確定。圖4所示為CIC濾波器的幅頻響應(yīng)曲線,抽取倍數(shù)D越大,通帶內(nèi)降幅越大,第一旁瓣抑制比隨著Q的增大而增加,Q級CIC濾波器級聯(lián)的旁瓣抑制比為13.46Q,該參數(shù)直接關(guān)系到后續(xù)的抽取是否會發(fā)生頻譜混疊現(xiàn)象。

圖4 CIC幅頻圖Fig.4 CIC amplitude frequency diagram
由圖4可知,隨著濾波器級聯(lián)級數(shù)的增加,阻帶衰減增大,當(dāng)濾波器的級聯(lián)級數(shù)為5時,阻帶最小衰減能達到67.3dB,基本能滿足實際的應(yīng)用需求。
2.2 CIC補償濾波器的設(shè)計
由CIC濾波器的特性可知,增加濾波器的級聯(lián)級數(shù)雖然能夠增大阻帶衰減,但是同時也會帶來通帶衰減。當(dāng)信號通帶頻率為2kHz,以2.4MHz作為信號的采樣頻率,采用5級CIC濾波器級聯(lián)以150倍抽取時,CIC濾波器的頻率響應(yīng)如圖5所示。在通帶內(nèi)信號幅值有將近3.57dB的衰減,當(dāng)信號通過時會出現(xiàn)比較嚴重失真的情況,因此需要設(shè)計一個補償濾波器以改善CIC濾波器的通帶衰減問題,CIC補償濾波器的幅頻響應(yīng)曲線如圖5所示。
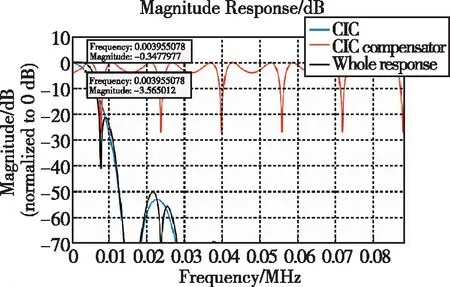
圖5 CIC補償濾波器的幅頻響應(yīng)Fig.5 Amplitude frequency response of CIC compensation filter
由圖5CIC補償濾波器的幅頻響應(yīng)曲線可知,經(jīng)過CIC的補償之后,通帶內(nèi)的幅值衰減下降到0.35dB,因此該濾波器能達到補償CIC濾波器通帶內(nèi)幅值衰減的目的。
3 聲源定位模型的建立
3.1 麥克風(fēng)陣列結(jié)構(gòu)的設(shè)計
麥克風(fēng)陣列的設(shè)計對聲源信號的成功定位起著關(guān)鍵作用,在對空間信號進行定位時至少需要4個麥克風(fēng)傳感器放置在不同的方位。理論上聲傳感器越多能獲得的定位結(jié)果越精確,但同時也會帶來陣列冗余和計算量加大的問題,對時延估值造成一定的影響。因此,本文綜合考慮各方面因素,選擇基于四元麥克風(fēng)陣列的聲源定位模型。
以O(shè)為原點建立如圖6所示的空間坐標(biāo)系,聲源S到原點O的距離為l,其在平面的投影與X正半軸的夾角為φ,與Z正半軸的夾角為θ,聲傳感器依次放置在圖6所示的位置,其中S1(d,0,0),S2(0,d,0),S3(-d,0,0),S4(0,-d,0)分別表示4個聲傳感器的坐標(biāo)位置。在近場模式下聲信號以球面波的形式傳播,以τij表示聲源到傳感器Si與Sj之間的時間延遲,v表示聲音在空氣中的傳播速度,聲源S到達各個傳感器的距離分別為l1、l2、l3和l4。

圖6 麥克風(fēng)陣列原理圖Fig.6 Schematic diagram of microphone array
根據(jù)以上條件可得
(4)
(5)
再將直角坐標(biāo)系轉(zhuǎn)化為球面坐標(biāo)系可得

(6)
聯(lián)立以上方程組化簡可得
(7)
根據(jù)式(4)、式(5)、式(6)和式(7)即可求得聲源到達各個傳感器之間的時延值和其方位角與俯仰角,從而確定聲源的方位[11-13]。
3.2 廣義互相關(guān)時延估計算法
在麥克風(fēng)陣列的聲源定位系統(tǒng)中,采用基本互相關(guān)算法進行時延估計時,由于環(huán)境中噪聲的影響導(dǎo)致所求得的互相關(guān)函數(shù)峰值難以和噪聲等干擾形成的偽峰值明顯區(qū)分開,進而影響到時延估計和方位估計的精度。為了抑制噪聲提高信噪比[14],在基本互相關(guān)算法的基礎(chǔ)上采用頻域加權(quán)的方式對信號的互功率譜進行處理,銳化信號的峰值。將處理后的信號通過傅里葉逆變換到時域,進一步求解信號到達相鄰2個麥克風(fēng)的時延值,基于加權(quán)函數(shù)的廣義互相關(guān)函數(shù)Rx1x2(τ)表達式為

(8)
其中,ψ(ω)為加權(quán)函數(shù);Gx1x2(ω)為信號x1(t)和x2(t)的互功率譜;當(dāng)互相關(guān)函數(shù)Rx1x2(τ)取得最大值時所對應(yīng)的τ值即為所求的時延估計值。在不同的環(huán)境下選擇不同的加權(quán)函數(shù)對整個系統(tǒng)有著不同的影響,通過選擇合適的加權(quán)函數(shù)可以極大地增強系統(tǒng)抗環(huán)境干擾的能力,從而提高時延估計精度。傳統(tǒng)的加權(quán)函數(shù)有ROTH加權(quán)函數(shù)、SCOT加權(quán)函數(shù)和PHAT加權(quán)函數(shù)[15],PHAT加權(quán)函數(shù)的表達式為
(9)
3.3 改進后的廣義互相關(guān)時延估計算法
在低信噪比時,基于PHAT的加權(quán)函數(shù)在同等條件下相較于前兩者有著更好的表現(xiàn),但是隨著信噪比的降低,其時延估計精度也隨之下降,因此在實際應(yīng)用中如何提高時延估計精度是當(dāng)前基于麥克風(fēng)陣列聲源定位系統(tǒng)研究的重點。本文充分考慮在PHAT加權(quán)函數(shù)的基礎(chǔ)上進一步優(yōu)化,提出了一種改進的PHAT加權(quán)函數(shù),通過給PHAT加權(quán)函數(shù)增加權(quán)重的方式提高其在低信噪比條件下抑制偽峰值的能力,降低噪聲對時延估值的影響。將改進后的PHAT加權(quán)函數(shù)定義為PHAT-σ加權(quán)函數(shù),其表達式為
(10)
加權(quán)因子σ的取值通過在不同信噪比條件下多次實驗估計出最優(yōu)值,根據(jù)經(jīng)驗選擇合適的加權(quán)因子σ以降低PHAT加權(quán)函數(shù)在低信噪比下的時延估計誤差和提升抗噪能力,從而達到達銳化信號峰值和提高時延估計準(zhǔn)確性的目的。改進后的廣義互相關(guān)函數(shù)表達式為

(11)
4 仿真與實驗驗證
采用2kHz的余弦信號模擬聲源信號,在信噪比為-5dB的條件下采用兩種不同加權(quán)函數(shù)的廣義互相關(guān)算法進行時延估計,其結(jié)果如圖7所示。通過比較兩圖可以發(fā)現(xiàn),在低信噪比情況下直接使用PHAT加權(quán)函數(shù)計算的信號互功率譜偽峰值較為嚴重,極值不太明顯;而采用改進后的PHAT-σ加權(quán)函數(shù)處理后的信號互功率譜偽峰值得到了明顯的抑制,其抗噪性能更強。
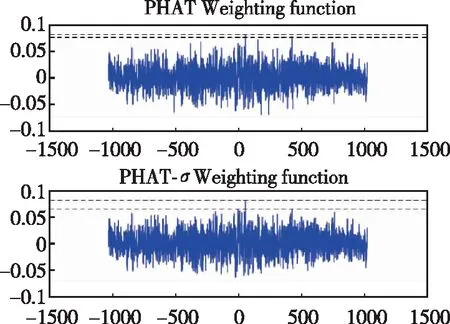
圖7 不同加權(quán)函數(shù)下的互功率譜Fig.7 Cross power spectrum under different weighting functions
通過圖7可以發(fā)現(xiàn),在信噪比較低的環(huán)境下,PHAT加權(quán)函數(shù)對噪聲的抑制能力相對較弱,信號的偽峰值較明顯,而改進的PHAT-σ加權(quán)函數(shù)表現(xiàn)更為良好,能起到很好地銳化信號峰值的作用。因此在信噪比為-5dB條件下,對同一聲源S采用PHAT加權(quán)函數(shù)算法和PHAT-σ加權(quán)函數(shù)算法進行實驗測試。將4路麥克風(fēng)S1、S2、S3、S4放置成均勻線陣,相鄰2路麥克風(fēng)傳感器的間距為0.07m,麥克風(fēng)陣列的參考陣元S1與聲源的方位角為120°,聲源處于遠場模型,設(shè)定聲速為340m/s,信號到達相鄰2路傳感器之間的理論延遲應(yīng)為0.1029ms,取10次實驗結(jié)果進行誤差分析,測試結(jié)果如表1所示。
根據(jù)表1可知,基于PHAT加權(quán)函數(shù)的時延估計相對誤差為4.22%,角度估計相對誤差為1.16%;基于PHAT-σ加權(quán)函數(shù)的時延估計相對誤差為1.46%,角度估計誤差為0.39%。綜上,在低信噪比條件下,對比兩種加權(quán)函數(shù)處理后的結(jié)果可知,經(jīng)過改進后的加權(quán)函數(shù)算法抗噪性能得到了加強,并且時延估計誤差和角度估計誤差都有了不同程度的降低,在聲源定位系統(tǒng)中能夠更加有效地確定聲源所在方位。

表1 采用兩種不同算法進行時延估計的測試結(jié)果
5 結(jié)論與展望
本文設(shè)計的聲源定位系統(tǒng)中,使用數(shù)字MEMS麥克風(fēng)傳感器采集聲源信號,采用FPGA作為核心控制系統(tǒng)完成多通道聲源信號的同步采集和數(shù)據(jù)傳輸,并且針對傳統(tǒng)廣義互相關(guān)算法的加權(quán)函數(shù)在信噪比較低的環(huán)境下時延估計誤差較大的問題,提出了一種改進PHAT加權(quán)函數(shù)的方法,實驗結(jié)果表明:
1)在相同的環(huán)境下采用改進后的PHAT-σ加權(quán)函數(shù)進行時延估計時,誤差將進一步降低,且其抗噪能力更強。
2)本文提出的改進廣義互相關(guān)加權(quán)函數(shù)算法未充分考慮室內(nèi)回聲對麥克風(fēng)陣列接收到的信號的干擾,在麥克風(fēng)陣列接收到的信號較弱時,加權(quán)函數(shù)可能會出現(xiàn)較大的偏差導(dǎo)致定位誤差變大,因此在未來的研究中需要進一步加強這一方面的研究。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
