基于抗差估計(jì)改進(jìn)的GNSS/INS組合導(dǎo)航完好性監(jiān)測(cè)方法*
2021-12-07 03:10:20任利簡(jiǎn)趙修斌龐春雷
航天控制 2021年5期
任利簡(jiǎn) 趙修斌 龐春雷 張 闖 張 良
1. 空軍工程大學(xué)信息與導(dǎo)航學(xué)院, 西安 710077 2. 中國(guó)人民解放軍95510部隊(duì), 貴陽(yáng) 550029
0 引 言
衛(wèi)星導(dǎo)航系統(tǒng)完好性是指當(dāng)系統(tǒng)無(wú)法完成預(yù)定操作或?qū)?dǎo)航結(jié)果不信任時(shí),向用戶及時(shí)發(fā)出有效告警的能力[1]。對(duì)于用戶來(lái)說(shuō),最直接、便捷的完好性監(jiān)測(cè)方法主要有接收機(jī)自主完好性監(jiān)測(cè)[2](receiver autonomous integrity monitoring, RAIM)和用戶輔助的完好性監(jiān)測(cè)(user assistant ingtegrity monitoring, UAIM)。其中,對(duì)于飛機(jī)、艦艇等運(yùn)動(dòng)載體來(lái)說(shuō),慣導(dǎo)(inertial navigation system, INS)輔助的GNSS(global navigation satellite system, GNSS)完好性監(jiān)測(cè)(INS assistant GNSS integrity monitoring, IAIM)在性能上具有優(yōu)勢(shì)[3],并且已經(jīng)得到了廣泛應(yīng)用。
目前GNSS/INS組合導(dǎo)航系統(tǒng)通常使用卡爾曼濾波,IAIM方法也大多是建立在卡爾曼濾波殘差檢測(cè)的基礎(chǔ)上。作為IAIM的關(guān)鍵技術(shù),傳統(tǒng)的殘差卡方檢測(cè)法可以較好地檢測(cè)出突變誤差,但當(dāng)GNSS或INS出現(xiàn)緩變誤差時(shí),由于初始誤差不易檢測(cè),有故障的輸出將影響下一步的狀態(tài)估計(jì)值,使其連續(xù)跟蹤故障輸出,導(dǎo)致殘差一直保持較小值,難以被系統(tǒng)檢測(cè)到,影響系統(tǒng)向用戶發(fā)出及時(shí)有效的告警;而Diesel等人于1996年提出的自主完好性監(jiān)測(cè)外推(autonomous ingtegrity monitoring extrapolation,AIME)法[4]在殘差卡方檢測(cè)的基礎(chǔ)上,加入了滑窗檢測(cè),在檢測(cè)過(guò)程中同時(shí)利用當(dāng)前量測(cè)信息和歷史序列信息,對(duì)于緩變誤差具有較好的檢測(cè)性能[5]。但由于AIME法存在檢測(cè)時(shí)延,不能在誤差結(jié)束后迅速停止告警,一定程度上造成了漏警率和誤警率的上升,影響卡爾曼濾波精度。由此可見,AIME法還有進(jìn)一步提升的空間。
針對(duì)AIME法的上述缺陷,本文在GNSS/INS緊組合和卡爾曼濾波模型的基礎(chǔ)上,通過(guò)構(gòu)造標(biāo)準(zhǔn)化殘差對(duì)觀測(cè)量進(jìn)行檢測(cè),同時(shí)引入IGGⅢ權(quán)函數(shù)抗差估計(jì)進(jìn)一步提升系統(tǒng)對(duì)緩變誤差的檢測(cè)性能,通過(guò)對(duì)當(dāng)前歷元標(biāo)準(zhǔn)化殘差的判斷,選擇相應(yīng)的檢測(cè)方式,以提高組合導(dǎo)航系統(tǒng)完好性的監(jiān)測(cè)效率。
1 GNSS/INS緊組合導(dǎo)航模型
GNSS/INS緊組合系統(tǒng)是建立在卡爾曼濾波基礎(chǔ)上、在偽距、偽距率、多普勒或載波頻率級(jí)別上的組合[6],當(dāng)短時(shí)間內(nèi)可見衛(wèi)星數(shù)少于4顆時(shí),組合系統(tǒng)仍然能夠保證一定的連續(xù)導(dǎo)航能力,避免了慣導(dǎo)單獨(dú)工作時(shí)誤差積累過(guò)快的問(wèn)題,因此本文選擇緊組合導(dǎo)航系統(tǒng)作為慣導(dǎo)輔助GNSS完好性監(jiān)測(cè)技術(shù)的基礎(chǔ)模型[7-8]。
1.1 系統(tǒng)狀態(tài)方程
緊組合系統(tǒng)狀態(tài)方程包含INS誤差方程和GNSS誤差方程[9],其中INS誤差方程主要是姿態(tài)、速度、位置以及慣性器件誤差方程[10],即
(1)
式中,FI(t)為系統(tǒng)狀態(tài)轉(zhuǎn)移矩陣,GI(t)為系統(tǒng)噪聲轉(zhuǎn)移矩陣,WI(t)為系統(tǒng)噪聲矢量,來(lái)自陀螺和加速度計(jì)的隨機(jī)誤差。XI(t)為15維誤差狀態(tài)變量,其表達(dá)式為[11]
(2)
GNSS誤差參量為等效時(shí)鐘誤差相應(yīng)的距離δtu和等效時(shí)鐘頻率誤差相應(yīng)的距離率δtru,其狀態(tài)方程為
(3)
式中:τtru為誤差相關(guān)時(shí)間,ωtu為白噪聲,ωtru為驅(qū)動(dòng)噪聲。
對(duì)式(1)和式(3)進(jìn)行聯(lián)立,即可得緊組合系統(tǒng)狀態(tài)方程

(4)
1.2 系統(tǒng)量測(cè)方程
緊組合系統(tǒng)量測(cè)方程包含偽距差方程和偽距率差方程。

(5)

(6)

同理可得,偽距差率方程為
(7)
對(duì)式(6)和式(7)進(jìn)行聯(lián)立,即緊組合系統(tǒng)狀態(tài)方程[12]
(8)
2 基于抗差估計(jì)改進(jìn)的完好性監(jiān)測(cè)方法
2.1 自主完好性監(jiān)測(cè)外推(AIME)法
傳統(tǒng)的殘差卡方檢測(cè)法對(duì)于緩變誤差的檢測(cè)并不十分有效,因?yàn)槌跏颊`差很小以至于難以被檢測(cè)出來(lái),當(dāng)前歷元的故障輸出將繼續(xù)影響下一歷元的狀態(tài)一步預(yù)測(cè)值,并導(dǎo)致誤差連續(xù)跟蹤輸出,使得各歷元的殘差均保持較小值。
AIME法的出現(xiàn)較好地解決了殘差卡方檢測(cè)法對(duì)于緩變誤差檢測(cè)效果不佳的問(wèn)題。AIME法在殘差卡方檢測(cè)法中引入滑窗檢測(cè)法,而滑窗檢測(cè)法的檢驗(yàn)統(tǒng)計(jì)量不局限于當(dāng)前歷元的觀測(cè)量,還取決于滑動(dòng)窗口內(nèi)的過(guò)去歷元的觀測(cè)量[13]。在離散化卡爾曼濾波過(guò)程中,k歷元的殘差rk及其方差Vk分別為
(9)
(10)
定義檢驗(yàn)統(tǒng)計(jì)量為
(11)
其中
(12)
(13)

(14)
其中Td為檢測(cè)門限,可通過(guò)上式求得。通過(guò)比較檢測(cè)統(tǒng)計(jì)量savg與檢測(cè)門限Td,如果savg大于Td則表明存在誤差,否則無(wú)誤差。
由式(14)可知,當(dāng)誤警率α確定時(shí),檢測(cè)門限Td與可見衛(wèi)星數(shù)n之間存在一一對(duì)應(yīng)的關(guān)系。若設(shè)置α=0.001,則檢測(cè)門限Td與可見衛(wèi)星數(shù)為n之間的對(duì)應(yīng)關(guān)系如表1所示。

表1 檢測(cè)門限與可見衛(wèi)星數(shù)的關(guān)系
2.2 抗差估計(jì)改進(jìn)的AIME算法
作為目前主流的完好性監(jiān)測(cè)方法,雖然AIME法對(duì)于緩變誤差的檢測(cè)有較好的作用,但在未檢測(cè)到小幅誤差時(shí),全程基于滑動(dòng)窗口檢測(cè)的AIME法仍需考察過(guò)去歷元的觀測(cè)量來(lái)對(duì)當(dāng)前歷元做出判決,使得系統(tǒng)計(jì)算負(fù)擔(dān)較重;且在誤差產(chǎn)生和結(jié)束歷元,系統(tǒng)對(duì)當(dāng)前歷元觀測(cè)數(shù)據(jù)的分析會(huì)受到過(guò)去歷元觀測(cè)數(shù)據(jù)的“抑制”作用,從而造成系統(tǒng)當(dāng)前歷元產(chǎn)生誤判從而對(duì)系統(tǒng)當(dāng)前歷元產(chǎn)生誤判,一定程度上提高了漏警率。
為在AIME法的基礎(chǔ)上進(jìn)一步提高組合導(dǎo)航系統(tǒng)對(duì)緩變誤差的檢測(cè)效果,本節(jié)分別定義了基于當(dāng)前歷元的檢測(cè)和基于滑動(dòng)窗口的檢測(cè)下的標(biāo)準(zhǔn)化殘差,并以此引入三段權(quán)函數(shù)抗差估計(jì)對(duì)AIME法進(jìn)行改進(jìn)。
當(dāng)基于滑動(dòng)窗口檢測(cè)時(shí),定義其對(duì)應(yīng)的標(biāo)準(zhǔn)化殘差為
(15)
同理,當(dāng)基于當(dāng)前歷元檢測(cè)時(shí),定義相應(yīng)的標(biāo)準(zhǔn)化殘差為
(16)

三段抗差等價(jià)權(quán)函數(shù)表達(dá)式[14]為
在這里會(huì)好的,我想什么時(shí)候照鏡子就可以盡情地照。我可以和克里斯蒂娜交朋友,可以把頭發(fā)剪短,可以讓別人去打掃收拾他們自己的殘局。
(17)

利用三段抗差等價(jià)權(quán)函數(shù)對(duì)觀測(cè)噪聲方差陣Rk的對(duì)角線元素進(jìn)行處理
(18)
(19)

3 仿真校驗(yàn)及結(jié)果分析
為驗(yàn)證本文所提出的GNSS/INS組合導(dǎo)航完好性監(jiān)測(cè)方法的性能,利用多種實(shí)驗(yàn)設(shè)備搭建一套仿真平臺(tái),包括飛行軌跡生成系統(tǒng)、GNSS信號(hào)模擬源、GNSS/INS緊組合卡爾曼濾波系統(tǒng)以及完好性監(jiān)測(cè)模塊等,通過(guò)設(shè)置目前主流的AIME法為對(duì)照組,驗(yàn)證所提方法的有效性。
仿真過(guò)程中GNSS輸出頻率設(shè)為1Hz,慣性測(cè)量單元的輸出頻率為100Hz,陀螺隨機(jī)常值漂移為0.1(°)/h,加速度計(jì)隨機(jī)常值漂移為10μg,可見衛(wèi)星數(shù)為10顆(S1~S10),卡爾曼濾波周期為1s,仿真時(shí)間為1600s,偽距觀測(cè)噪聲為1m,滑動(dòng)窗口數(shù)設(shè)為5,誤警率設(shè)置為0.001。
測(cè)試1:設(shè)8號(hào)衛(wèi)星的偽距觀測(cè)量在第201s出現(xiàn)幅值為20m、持續(xù)59s的突變誤差,測(cè)試結(jié)果如圖1所示。
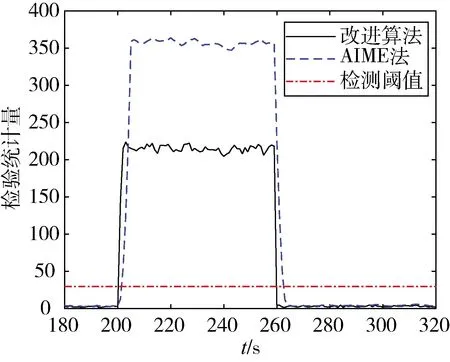
圖1 突變誤差下兩種方法檢驗(yàn)統(tǒng)計(jì)量的對(duì)比
可以看出,當(dāng)?shù)?01s注入誤差后的短時(shí)間內(nèi),兩方法的檢驗(yàn)統(tǒng)計(jì)量均明顯增大,且均大于檢測(cè)閾值,說(shuō)明兩種方法都能檢測(cè)到突變誤差。但同時(shí)也可以發(fā)現(xiàn),本文所提出的改進(jìn)方法相較于AIME法,不僅能夠更迅速地檢測(cè)出突變誤差,還能在誤差消失后迅速恢復(fù)正常的檢驗(yàn)統(tǒng)計(jì)量,避免了錯(cuò)誤告警。
測(cè)試2:設(shè)6號(hào)衛(wèi)星的偽距觀測(cè)量在第201s出現(xiàn)速率為1m/s、持續(xù)19s的緩變誤差,測(cè)試結(jié)果如圖2所示。

圖2 緩變誤差下兩種方法檢驗(yàn)統(tǒng)計(jì)量的對(duì)比
由圖可知,對(duì)于緩變誤差,本文所提出的改進(jìn)方法同樣能夠更快速地將其檢測(cè)出來(lái)并發(fā)出告警,并在誤差消失后1s內(nèi)迅速停止告警,而AIME法則需要4s才能恢復(fù)正常檢驗(yàn)統(tǒng)計(jì)量。這是因?yàn)楸疚乃岣倪M(jìn)方法在誤差消失后能夠迅速轉(zhuǎn)換檢測(cè)方法,將基于滑動(dòng)窗口檢測(cè)切換為基于當(dāng)前歷元檢測(cè),避免了之前歷元的觀測(cè)量影響當(dāng)前歷元的檢測(cè)過(guò)程、得出錯(cuò)誤的檢測(cè)結(jié)果。
測(cè)試3:設(shè)6號(hào)衛(wèi)星的偽距觀測(cè)量在第171s先出現(xiàn)速率為1.5m/s、持續(xù)19s的緩變誤差,然后在第195s出現(xiàn)幅值為20m、持續(xù)55s的突變誤差,再在第253s出現(xiàn)速率為3m/s、持續(xù)8s的緩變誤差,最后在265s出現(xiàn)幅值為10m、持續(xù)3s的突變誤差。測(cè)試結(jié)果如圖3所示。

圖3 間歇性誤差下兩種方法檢驗(yàn)統(tǒng)計(jì)量的對(duì)比
可以看出,在出現(xiàn)間歇性誤差的情況下,AIME法因?yàn)樽陨頇z測(cè)的“時(shí)延”特性,很容易造成誤判,向用戶發(fā)出錯(cuò)誤的告警信息;而本文所提出的改進(jìn)算法由于沒(méi)有全程基于滑動(dòng)窗口檢測(cè),能夠靈活采取對(duì)應(yīng)的檢測(cè)方法,所以在一定程度上避免了誤警。
4 結(jié) 論
本文所提方法在建立GNSS/INS緊組合模型以及現(xiàn)有的AIME法的基礎(chǔ)上,利用三段抗差等價(jià)權(quán)函數(shù)對(duì)卡爾曼濾波過(guò)程進(jìn)行調(diào)整,進(jìn)一步消除了緩變誤差的影響;并通過(guò)對(duì)當(dāng)前歷元觀測(cè)量的檢測(cè)情況決定下一歷元的檢測(cè)方法,較好地克服了AIME法全程基于滑動(dòng)窗口檢測(cè)而造成的告警時(shí)間長(zhǎng)等缺陷。通過(guò)對(duì)比試驗(yàn),驗(yàn)證了所提方法的有效性,從而為衛(wèi)星/慣性組合導(dǎo)航系統(tǒng)的完好性監(jiān)測(cè)提供了另一種可行的方法。
猜你喜歡
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
北京航空航天大學(xué)學(xué)報(bào)(2017年9期)2017-12-18 07:12:25
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
Coco薇(2016年2期)2016-03-22 02:42:52
電源技術(shù)(2016年9期)2016-02-27 09:05:39
電源技術(shù)(2015年1期)2015-08-22 11:16:28
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長(zhǎng)指南(2015年4期)2015-05-19 14:47:56
