基于機器視覺的工業(yè)儀表識別技術研究
2021-12-08 11:40:16蘇乾賀旭杰燕曉龍趙鑫
今日自動化 2021年9期
關鍵詞:機器視覺
蘇乾 賀旭杰 燕曉龍 趙鑫

[摘? ? 要]在工業(yè)儀表自動識別中應用機器視覺技術可以有效實現(xiàn)工業(yè)生產(chǎn)的自動化,將工業(yè)儀表識別和數(shù)據(jù)提取從人工轉(zhuǎn)化為機器視覺,機器視覺相較于人工識別更加準確高效,并且運行穩(wěn)定,可以有效提高生產(chǎn)效率與質(zhì)量,將工作人員負擔與壓力大大減輕,并且減少成本投入。文章主要研究基于機器視覺發(fā)展的工業(yè)儀表識別技術,從工業(yè)儀表的自動獲取算法,圖像預處理,工業(yè)儀表區(qū)域數(shù)據(jù)提取,指針儀表識別以及數(shù)字儀表識別等方面進行研究,促進基于機器視覺的工業(yè)儀表識別技術的健康發(fā)展。
[關鍵詞]機器視覺;工業(yè)儀表;識別技術
[中圖分類號]TP391.41 [文獻標志碼]A [文章編號]2095–6487(2021)09–0–02
[Abstract]The application of machine vision technology in the automatic identification of industrial instruments can effectively realize the automation of industrial production, and transform the identification and data extraction of industrial instruments from manual to machine vision. Compared with manual identification, machine vision is more accurate and efficient, and runs stably, which can effectively improve the production efficiency and quality, and greatly reduce the burden and pressure of staff, And reduce cost investment. This paper mainly studies the industrial instrument recognition technology based on the development of machine vision, from the aspects of automatic acquisition algorithm of industrial instrument, image preprocessing, regional data extraction of industrial instrument, pointer instrument recognition and digital instrument recognition. Promote the healthy development of industrial instrument recognition technology based on machine vision.
[Keywords]machine vision; industrial instruments; identification technology
1 指針工業(yè)儀表讀數(shù)識別
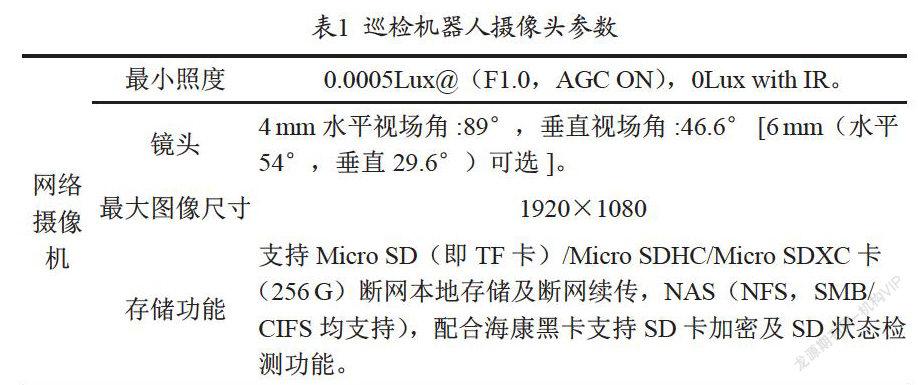
目前大部分儀表識別算法是建立在識別儀表圖像的基礎上,通過對拍攝的儀表圖片進行識別來獲取具體數(shù)值。工業(yè)生產(chǎn)環(huán)境較差,部分情況周圍環(huán)境較暗甚至需要安裝輔助光源對儀表表盤進行照明。目前部分工業(yè)現(xiàn)場條件較差,不能全部安裝攝像頭,并且部分儀表不需要全天候?qū)崟r監(jiān)控,只需要定期由巡檢人員對儀表數(shù)據(jù)收集記錄,在每個儀表旁安裝攝像頭會造成成本浪費。使用巡檢機器人代替固定攝像頭是工業(yè)生產(chǎn)自動化的重要措施,通過巡檢機器人移動對工業(yè)儀表數(shù)值進行識別,可以有效降低投入成本并且提高圖像采集質(zhì)量與效率。但是巡檢機器人相較于傳統(tǒng)機位拍攝,由于位置與角度的不確定,必然會造成圖像傾斜或扭曲,因此圖像矯正是識別工業(yè)儀表讀數(shù)的必要前提。巡檢機器人攝像頭參數(shù)見表1。目前工業(yè)儀表分為指針式儀表與數(shù)顯式儀表兩類,指針式儀表讀數(shù)識別需要從復雜背景中將儀表表盤區(qū)域進行提取,預處理表盤區(qū)域,方便后續(xù)數(shù)據(jù)讀取。在工業(yè)生產(chǎn)中指針式儀表種類眾多,讀數(shù)范圍具有較大差異,因此不同儀表之間缺乏固定識別方法,首先可提取指針式儀表表盤刻度圖像,對儀表刻度的起始角度和讀數(shù)范圍進行獲取,再通過霍夫直線變換對指針位置進行檢測,對儀表指針通過最小二乘法進行擬合確定指針角度,最后通過指針與儀表盤映射關系來獲取具體數(shù)據(jù)。
存儲功能 支持Micro SD(即TF卡)/Micro SDHC/Micro SDXC卡(256 G)斷網(wǎng)本地存儲及斷網(wǎng)續(xù)傳,NAS(NFS,SMB/CIFS均支持),配合海康黑卡支持SD卡加密及SD狀態(tài)檢測功能。
1.1 預處理指針式儀表圖像
指針式儀表圖像預處理是識別儀表數(shù)據(jù)的重要前提,由于巡檢機器人攝像頭與儀表很難保持水平角度,因此首先對圖像矯正處理拍攝角度。在工業(yè)生產(chǎn)中巡檢機器人實際拍攝中極易出現(xiàn)角度傾斜導致獲取的表盤圖像出現(xiàn)扭曲或傾斜,進而造成方向旋轉(zhuǎn)或偏移,給后續(xù)圖像識別造成阻礙與誤差。指針式儀表傾斜圖像如圖1所示。
實際中,巡檢機器人儀表圖像采集中經(jīng)常會出現(xiàn)上下偏移,左右偏移以及近大遠小的問題,因此為了進一步提高指針式儀表數(shù)據(jù)讀取的精確性,可采用透視變換儀表圖像傾斜矯正算法。該算法主要分為兩部分,首先巡檢機器人攝像頭將傾斜儀表的圖像獲取,根據(jù)拍攝情況建立透視變換矩陣,然后矯正傾斜儀表圖形。通常將變換透視也稱為投影映射,沿著一個方向?qū)D片投影在另一個平面上,將投影中心設置為攝影機位置,透視模型包括投影中心,源圖像平面以及新圖像平面。通常巡檢機器人獲取圖像視為新圖像平面物體圖像,當攝像機位置也就是投影中心發(fā)生變化,圖像產(chǎn)生傾斜時,由于兩個平面之間存在一定角度,因此圖像獲取會發(fā)生扭曲或傾斜。圖像在透視變換后對應點會發(fā)生變化,為了矯正指針儀表圖像會通過實際圖像與拍攝圖像之間像素關系進行矯正變換,確保獲得的儀表圖像清晰明確。
1.2 儀表表盤刻度提取
在工業(yè)生產(chǎn)中,根據(jù)實際用途分為不同種類儀表,儀表刻度也會隨測量參數(shù)產(chǎn)生變化造成指針式儀表應用機器視覺技術自動識別難度較大。獲取指針式儀表數(shù)據(jù)首先要獲得儀表的刻度與儀表指針方向,由于指針式儀表結(jié)構(gòu)為圓形,儀表刻度也呈圓形分布,圓形的圓心位于指針轉(zhuǎn)軸上。指針式儀表自動識別算法一直是機器視覺在工業(yè)儀表上應用的難題。
在具體操作中首先對表盤刻度區(qū)域進行定位,通常指針式儀表圓心處于指針轉(zhuǎn)軸位置,刻度區(qū)域在儀表內(nèi)呈環(huán)形分布。因此在自動識別技術中可以應用同心圓原理對儀表刻度區(qū)域進行定位,將圓心位置,起始刻度位置,量程以及單位進行確定。在獲取精確儀表圖像后再提取指針儀表內(nèi)刻度區(qū)域信息數(shù)據(jù)。在確定儀表圓心位置時可以應用霍夫檢測方法。對指針儀表外側(cè)邊緣與儀表刻度觀察構(gòu)成為同心圓,根據(jù)儀表實際構(gòu)造的特征在儀表內(nèi)構(gòu)成同心圓截取出刻度區(qū)域,由于環(huán)形區(qū)域不方便機器視覺讀取數(shù)據(jù),因此需要二極化處理儀表凸顯。二極化處理圖像是將儀表圖像的所有像素轉(zhuǎn)化為黑色與白色兩種,首先需要選取適合閥值,確保二級化處理后可以將圖像細節(jié)特征準確反應,圖像數(shù)據(jù)信息完整。在二極化處理環(huán)形區(qū)域后如果無法繼續(xù)讀取數(shù)據(jù)還需要變換儀表刻度區(qū)域,將圖像及坐標轉(zhuǎn)換后需要對信息進行提取,由于工業(yè)儀表種類較多,為了提高識別效率可以采用模板匹配法進行識別,需要提前將儀表刻度收集數(shù)據(jù)庫內(nèi),為有效提高識別效率質(zhì)量。提取儀表指針是識別工業(yè)儀表的重要部分,由于指針式儀表的指針呈線型,相較于其他儀表更容易識別,在實際中可以采用霍夫直線檢測算法精確定位儀表指針,細化儀表指針時采用最小二乘算法將儀表角度準確獲得。在識別指針式儀表過程中分為儀表刻度獲得與儀表指針角度兩方面,將兩者組合可以得出指針儀表數(shù)據(jù)。
2 數(shù)顯儀表讀數(shù)識別
在工業(yè)生產(chǎn)中儀表分為數(shù)顯式與指針式兩種,部分數(shù)顯儀表可以向監(jiān)控系統(tǒng)傳輸測量數(shù)據(jù),但是仍然有部分數(shù)顯式儀表不具有數(shù)據(jù)傳輸功能,只能將當前測量結(jié)果顯示。在數(shù)顯式儀表上沒有傳輸接口,獲取識別數(shù)據(jù)仍然像指針式儀表一樣采用人工采集,將數(shù)據(jù)收集記錄并進行分析,因此數(shù)顯式儀表讀數(shù)識別也是工業(yè)生產(chǎn)自動化中的重要任務。數(shù)顯式儀表讀數(shù)識別首先需要提取儀表盤內(nèi)數(shù)值,在確定數(shù)字位置時采用水平方向投影法與垂直方向投影法,由于數(shù)字儀表字符較為簡單,對數(shù)字采取字符分割。對分割后的數(shù)字字符進行歸一化,為后續(xù)識別字符做好基礎。
2.1 數(shù)字字符分割
數(shù)顯式儀表相較于指針式儀表同樣存在影響讀數(shù)精度的因素,因此巡檢機器人將數(shù)顯式儀表圖像獲取后,直接進行噪聲濾波與圖像暗光增強等圖像預處理,為后續(xù)數(shù)據(jù)讀取提供便利。巡檢機器人在數(shù)顯式儀表圖像獲取中難免會出現(xiàn)傾斜與扭曲情況,同樣需要對儀表圖像進行矯正,將數(shù)顯式儀表的圖像噪聲去除,亮度與相關區(qū)域增強。通常數(shù)顯式儀表數(shù)字顯示區(qū)域為矩形,在矩形區(qū)域內(nèi)包含數(shù)字字符,區(qū)域四邊與儀表邊框平行,根據(jù)數(shù)顯式儀表結(jié)構(gòu)直接確定數(shù)顯區(qū)域,為后續(xù)數(shù)字分割做好基礎。對數(shù)顯示儀表圖像預處理后直接進行數(shù)字字符分割,首先二值化處理圖像,將已表示數(shù)提取出來形成二值化圖像使圖像,更加清晰明確,提高字符分割準確率。
數(shù)顯式儀表圖像預處理后,可以直接進行儀表數(shù)字提取。一般情況下水平方向投影法與豎直方向投影法是應用較多的提取方法。主要原理是對圖像進行二值化處理,將原本圖像轉(zhuǎn)變?yōu)閿?shù)字為黑色,背景為白色的圖像處理。將黑色部分作為數(shù)字識別目標,然后對處理后的圖像在水平方向與豎直方向進行投影,在得到投影曲線后定位與分割數(shù)字字符。在得到圖像豎直投影后,對數(shù)值投影曲線按照從左到右的順序逐步檢測,其中檢測出0轉(zhuǎn)變?yōu)榉?的突變量,將其作為左邊字符邊界,逐步向右側(cè)開始檢測,在右側(cè)檢測到某個數(shù)值轉(zhuǎn)變?yōu)?的突變量時,將其作為右邊首個字符的邊界,將整個過程作為檢測一個字符的全過程,對其他數(shù)字字符按照同樣工作環(huán)節(jié)依次檢測,直到檢測所有字符的寬度和坐標。水平方向投影曲線檢測原理同樣,將數(shù)字字符的高度和縱向位置得出,綜合分析水平坐標大小與豎直坐標大小,將儀表各個數(shù)字字符的大小與位置準確得出,截取字符。
2.2 數(shù)字字符識別
數(shù)字字符識別是數(shù)顯儀表識別重要構(gòu)成部分,常見的數(shù)字字符識別方法有穿針引線法,三線掃描法,模板匹配法,神經(jīng)網(wǎng)絡算法等。其中穿針引線法作為較為簡單的方法,但是對二值化圖像的精度要求較高,并且要求字符分割水平較高。三線掃描法對數(shù)字字符識別需要在數(shù)字字符取三條平行線,根據(jù)數(shù)字字符與三條平行線之間的交叉情況對數(shù)字字符進行識別,但是三線掃描方法只能應用于部分數(shù)顯儀表中,適用性較差。模板匹配法是指提前制作相關數(shù)顯儀表的字符模板,根據(jù)數(shù)字字符與模板之間的相似程度對數(shù)字字符進行識別,雖然識別效率較高,但是需要前期進行大量準備,制作所有儀表的數(shù)字字符模板,當儀表圖像處理效果較差時,模板匹配法效率與質(zhì)量較低,抗干擾性能較差。神經(jīng)網(wǎng)絡算法作為新型識別方法,對數(shù)字字符要求較低,沒有特定要求,但是識別速度較快,準確度較高。
字符歸一化是數(shù)字字符識別的基礎,對數(shù)字字符分割后,首先需要將每個字符分別提取出來進行歸一化處理,如果沒有進行歸一化處理直接進行識別,會導致神經(jīng)網(wǎng)絡算法識別中所有輸入量為正值,導致權值矩陣產(chǎn)生變化,嚴重影響神經(jīng)網(wǎng)絡算法識別速度,因此為了避免出現(xiàn)識別錯誤的情況,對識別數(shù)字字符全部進行歸一化處理,可以顯著提高數(shù)字字符識別的準確率與效率。
3 結(jié)束語
隨著人工智能技術與機器視覺技術的不斷發(fā)展,在工業(yè)生產(chǎn)中的深度應用帶來諸多便利。由智能巡檢機器人代替?zhèn)鹘y(tǒng)固定監(jiān)控設備是未來發(fā)展趨勢,在減少成本投入的同時提高數(shù)據(jù)收集效率和質(zhì)量,大大減少工作人員壓力。針對工業(yè)儀表中指針式儀表與數(shù)顯式儀表提出具體技術,為促進工業(yè)儀表識別技術發(fā)展貢獻一份力量。
參考文獻
[1] 張瑩.數(shù)字化油田建設中自動化儀表的使用與維護研究[J].中國設備工程,2021(13):34-35.
猜你喜歡
軟件導刊(2016年11期)2016-12-22 21:52:17
電腦知識與技術(2016年28期)2016-12-21 12:13:14
科技視界(2016年26期)2016-12-17 17:31:58
科技視界(2016年25期)2016-11-25 19:53:52
科技視界(2016年25期)2016-11-25 09:27:34
科教導刊(2016年25期)2016-11-15 17:53:37
軟件工程(2016年8期)2016-10-25 15:55:22
科技視界(2016年20期)2016-09-29 11:11:40
科技視界(2016年6期)2016-07-12 09:12:40
科技視界(2016年15期)2016-06-30 19:03:30
