整車半主動懸架系統的姿態補償控制策略研究
2021-12-14 07:40:00吳麟麟許春妞汪若塵丁仁凱
重慶理工大學學報(自然科學) 2021年11期
吳麟麟,許春妞,汪若塵,丁仁凱
(江蘇大學 汽車與交通工程學院, 江蘇 鎮江 212013)
半主動懸架因其減振器阻尼可調,性能優于被動懸架且成本低于主動懸架,發展越來越迅速。車輛行駛過程中的姿態變化可能影響到行車安全性及操穩性,因而對其控制刻不容緩。
國外的Mori等[1]提出了一種新的車輪姿態角主動控制方法,采用準穩態分析模型,研究了輪胎姿態控制對車輛橫向運動的影響。Tchamna等[2]采用變剛度半主動懸架控制方法對車輛轉向行駛姿態進行控制。Arana等[3]設計考慮懸架偏轉積分以及微分作用的最優控制器,對車輛進行姿態控制。國內的謝健等[4]研究了包含直線電機主動懸架的整車姿態協調控制。陳雙等[5]設計了轉向工況下將LQG控制與模糊控制相結合的綜合控制策略,優化車身側傾姿態。
考慮現有針對車身姿態的控制大多采用單一的方法,或者只考慮單一的運行工況,導致車輛性能改善效果有限,且往往無法滿足不同運行工況下的性能需求,本文設計如下姿態控制方法:利用天棚控制改善車輛平順性,對于姿態控制,首先將根據車身縱向以及側向加速度計算出俯仰側傾補償力,然后通過對整車系統進行模態分析分別計算出俯仰及側傾能量并進行比較,從而進行補償力權重系數計算及分配,最后將2部分力合成為減振器阻尼力,從而達到對車身姿態進行控制的效果。
1 整車半主動懸架系統模型
1.1 整車動力學模型
建立整車7自由度模型,如圖1所示。
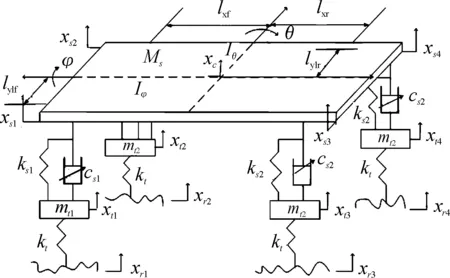
圖1 整車7自由度模型示意圖
整車微分方程如式(1)所示:
(1)
式中:
(2)
由于俯仰角及側傾角較小,則可得:
(3)
xs(t)和q(t)的關系由下式建立:
(4)
應用牛頓第二運動定律,用質量、阻尼,以及剛度將整車懸架系統模型矩陣化表示如式(5)所示。
(5)

由上式可得:
(6)
整車參數如表1所示。
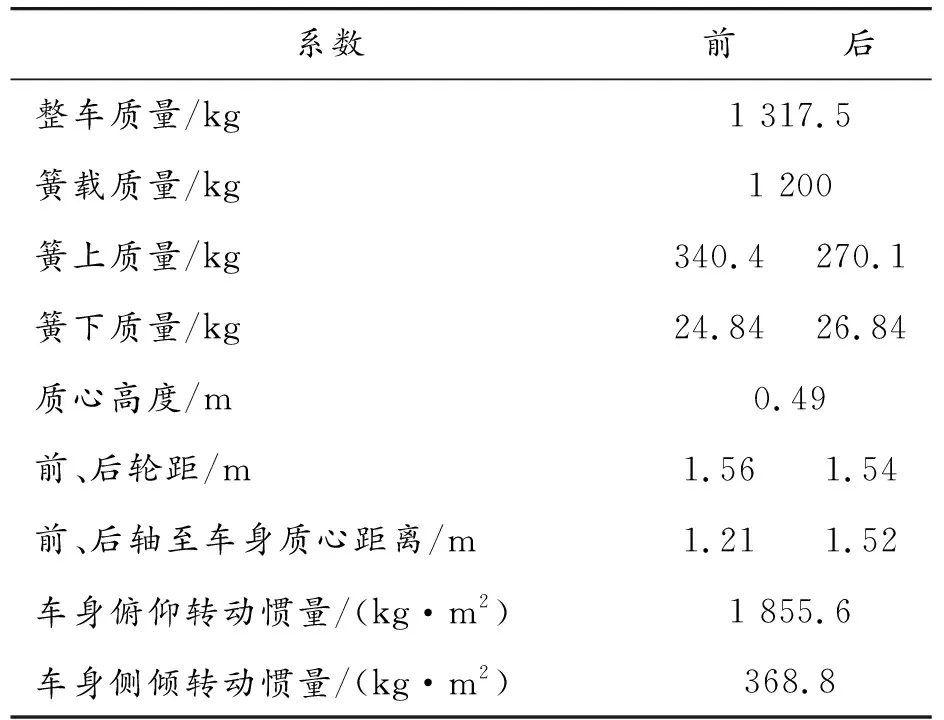
表1 整車參數
1.2 磁流變減振器模型建立
利用多項式模型[6]對磁流變減振器進行建模:
(7)
式中:ai為多項式擬合系數,且ai=bi+ciI,i為多項式擬合次數。則:
(8)
本次實驗對象為輸入電流在0~3 A的磁流變減振器,以0.25 A為間隔分別選取13組電流數據,在每一電流輸入下分別進行外特性試驗,試驗臺架如圖2所示。
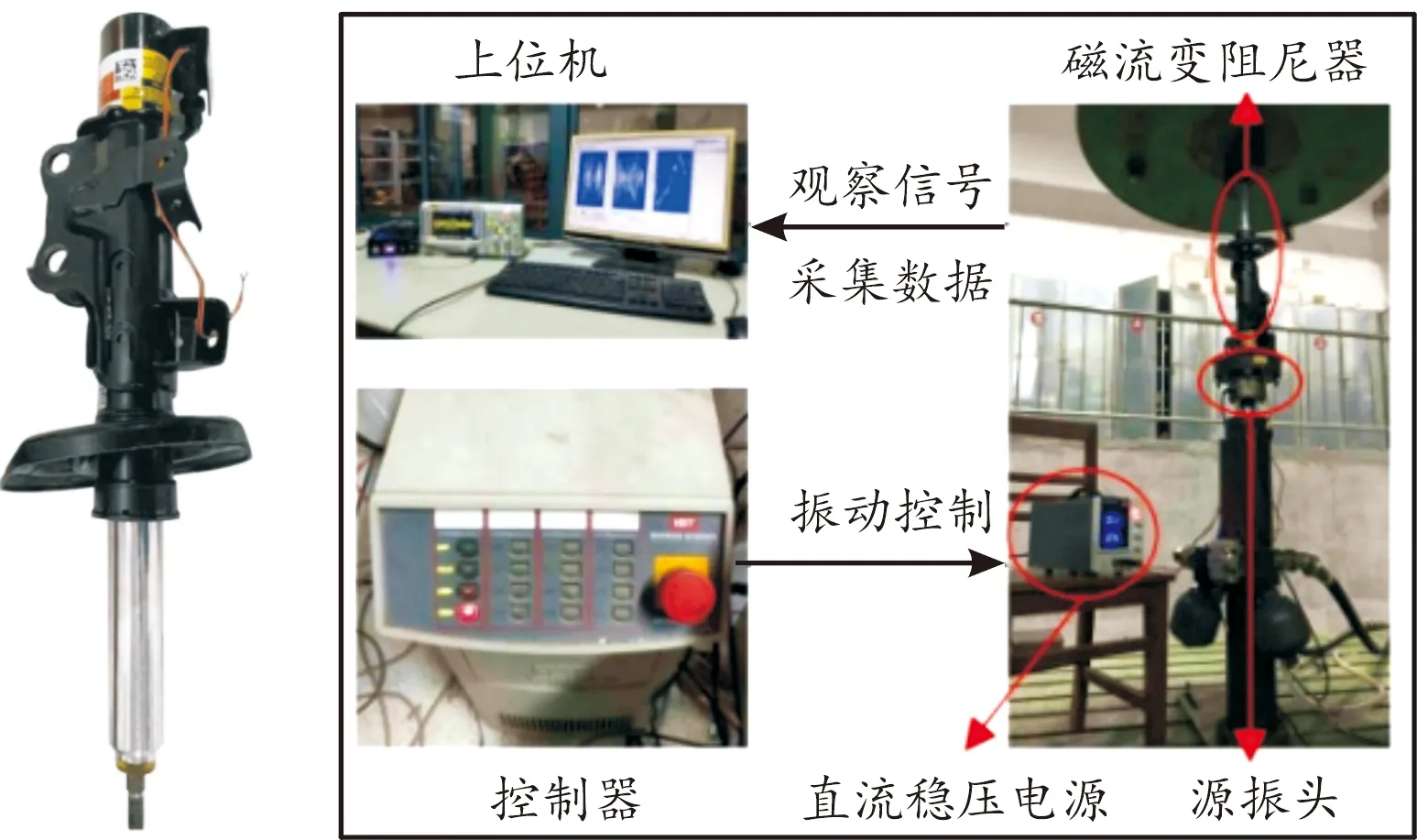
圖2 磁流變減振器試驗臺架
外特性試驗結果表明,磁流變減振器在13組不同電流輸入下的特性曲線在減振器兩端加速度分別為正和負時低速范圍內減振器阻尼力存在較大差異,即存在滯回環[7],因此可根據加速度正負將外特性曲線分為上下兩支,特性曲線如圖3所示。
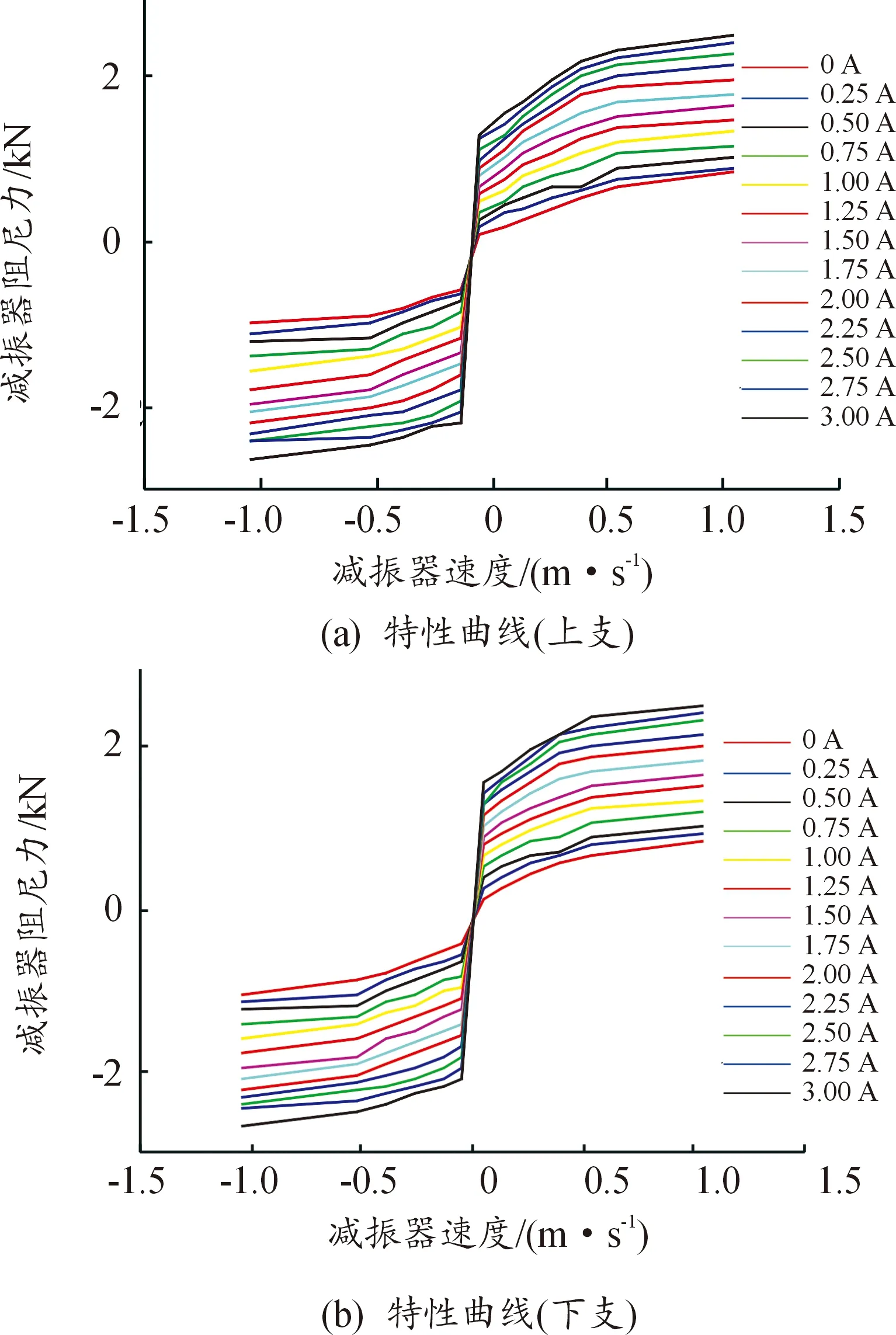
圖3 磁流變減振器上下支特性曲線
利用Matlab/Curve Fitting工具箱分別對上下支特性曲線根據式(9)進行擬合:

(9)
將多項式擬合結果與特性試驗數據點進行對比。圖4對比結果顯示,多項式模型擬合的曲線與試驗得出的數據點基本重合,有效驗證了所建多項式模型的精確性。
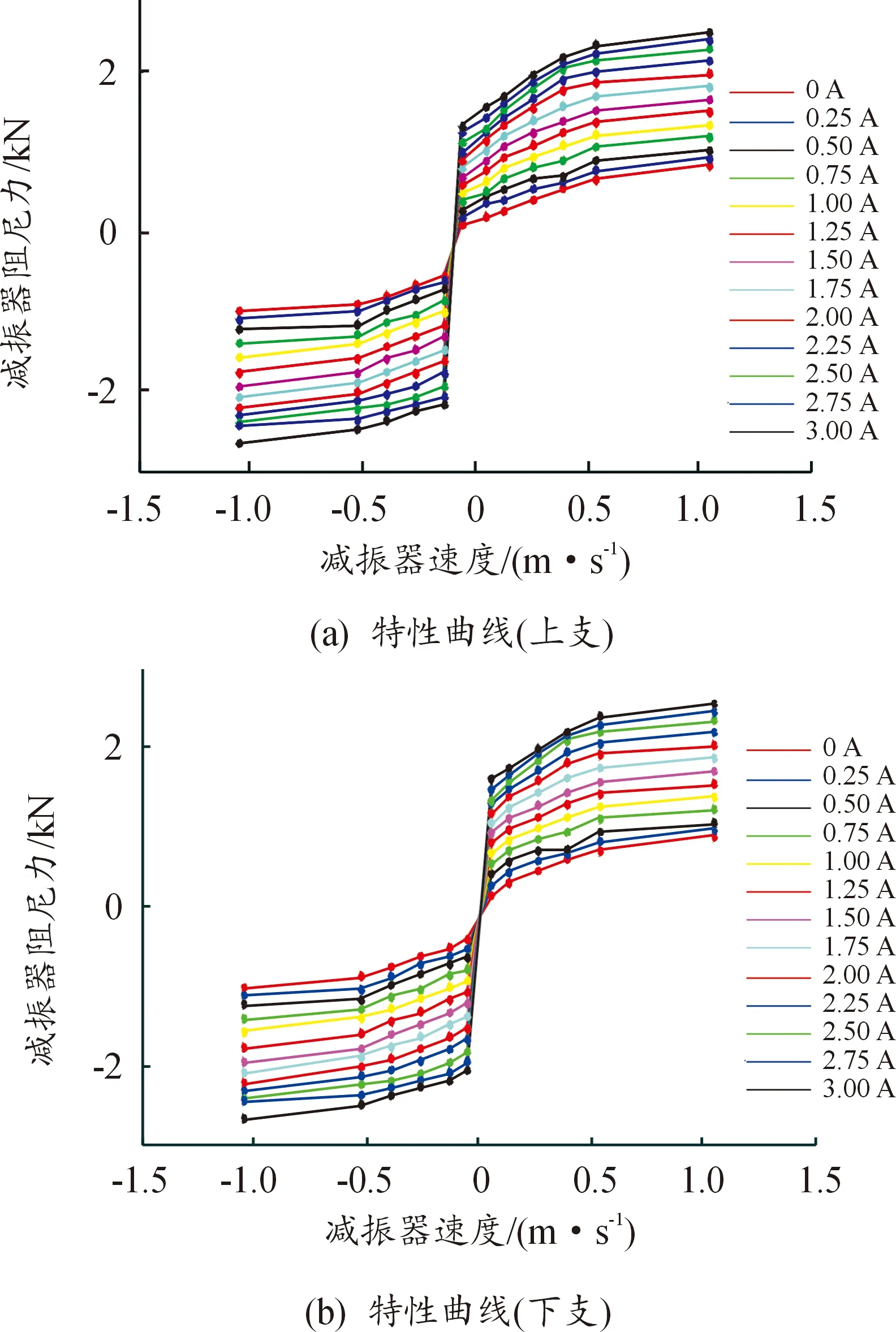
圖4 磁流變減振器擬合數據與實驗數據
2 整車半主動懸架系統控制算法設計
筆者設計的整車半主動控制算法主要分為2個部分,首先是針對車身垂向運動的天棚控制,其次是針對車身姿態變化采取的姿態補償控制,目的是為了在保證車身垂向動力學性能的基礎上改善車身姿態。
2.1 天棚控制算法設計
天棚控制的原理如圖5所示。
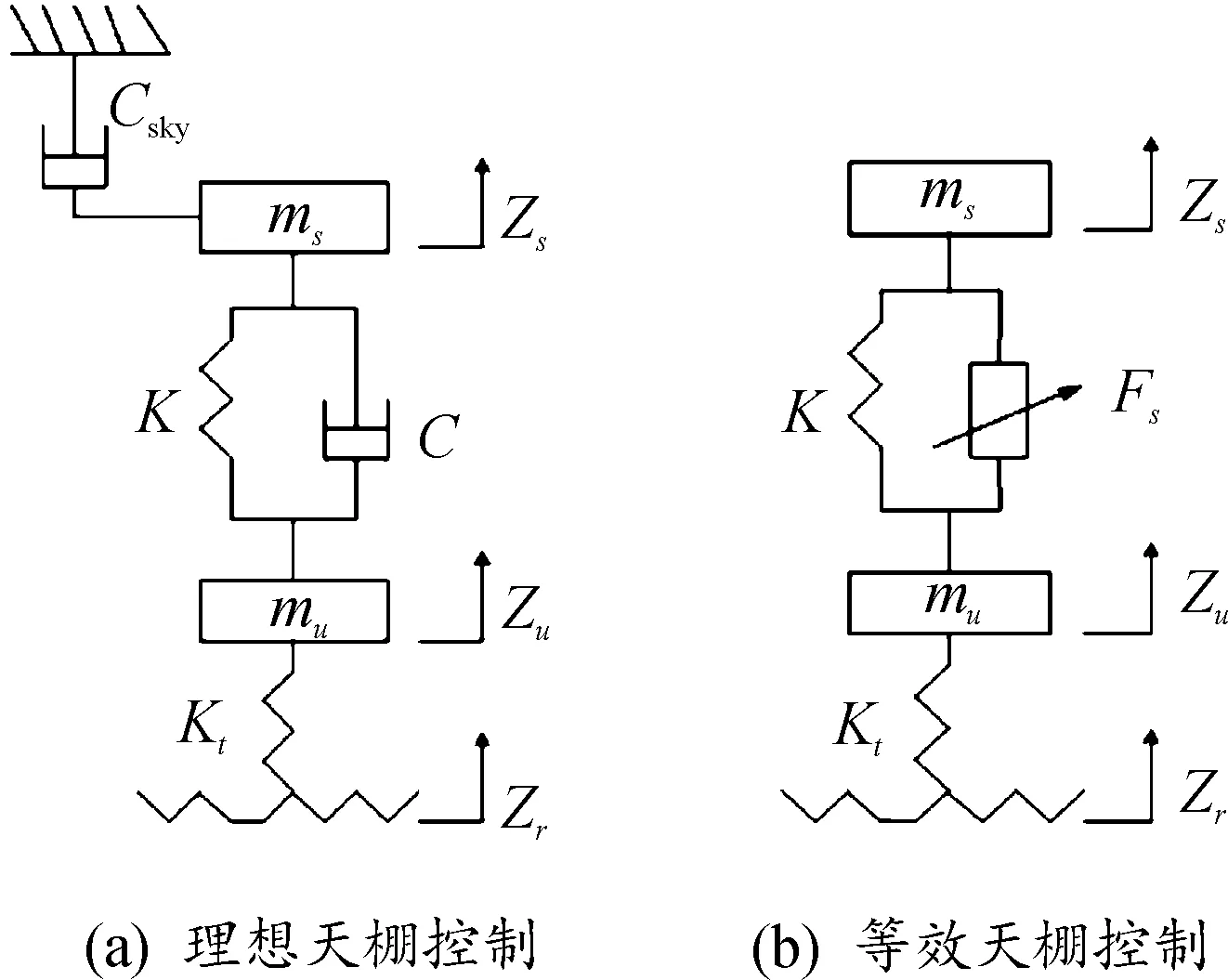
圖5 天棚控制原理示意圖
理想天棚控制由于實際情況的局限性可等效為在簧上簧下質量之間加入作動器[8],從而產生天棚控制力。
(10)
2.2 姿態控制算法設計
為了有效抑制車身姿態惡化,設計了整車姿態補償控制策略。1/2懸架俯仰示意圖如圖6所示。
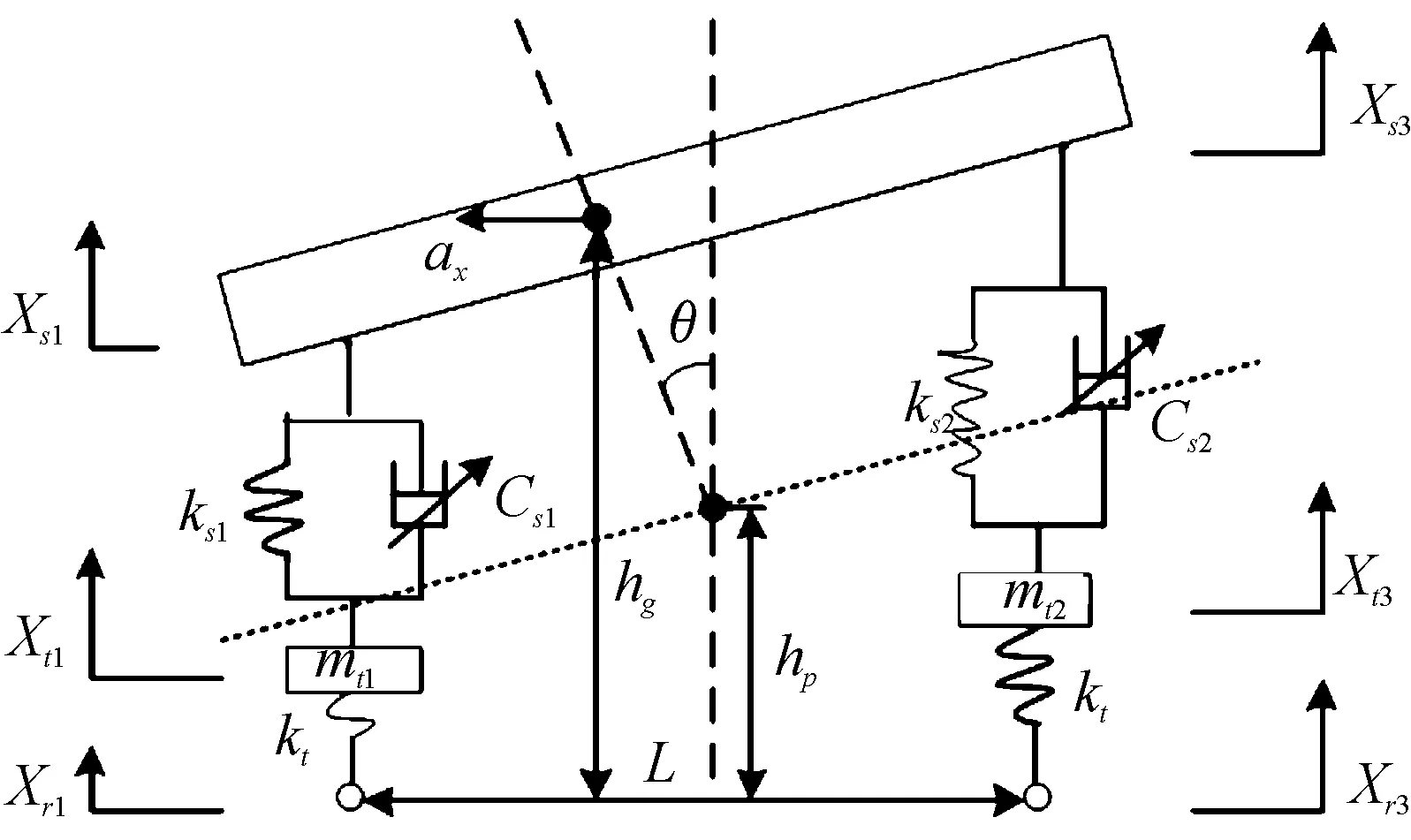
圖6 1/2懸架俯仰示意圖
以控制俯仰為例,車身產生俯仰運動時,可以通過調節減振器阻尼力來抑制其變化。當車輛縱向加速度為ax時,產生的俯仰力矩為:
Mp=ms·ax·hg
(11)
質心發生縱向位移產生力矩為:
Mx=ms·g·(hg-hp)·θ
(12)
前后載荷轉移力矩為:
(13)
式中:Ftfl、Ftrl、Ftfr、Ftrr分別為左前、左后、右前、右后輪胎垂向力。
此時令前后懸架分別產生大小相等、方向相反的力ΔFP,則產生的抗俯仰力矩為Mf=2·ΔFP·L,且
Mp+Mx+Mtf+Mtr-Mf=0
(14)
則俯仰補償力ΔFP可由上式求出,同理可得到側傾補償力ΔFR。其中:hg表示質心高度,hp表示俯仰中心高度、L為軸距。則左前、右前、左后、右后各懸架理想阻尼力分別由天棚控制力及姿態補償力得出[9]:
(15)
式中:Fsfl、Fsfr、Fsrl、Fsrr為分別為左前、右前、左后、右后懸架天棚控制力。為避免理想阻尼力超出減振器有效范圍,引入俯仰以及側傾補償力的權重系數,得到各懸架修正阻尼力:
(16)
式中:α、β分別為俯仰以及側傾補償力的權重系數。
基于以上公式,根據俯仰側傾運動能量進行權重系數的計算,采用模態分析[10]方法計算車身運動能量,構造模態矩陣:
(17)

x(t)=Γp(t)
(18)

則第i個模式下存儲的動能eki(t)和勢能epi(t)為:
(19)
車輛俯仰運動的能量為:
e2(t)=ek2(t)+ep2(t)
(20)
側傾運動的能量為:
e3(t)=ek3(t)+ep3(t)
(21)
則權重系數的計算規則如下:
1)e2>e3時,
α=1;β=e3/e2
(22)
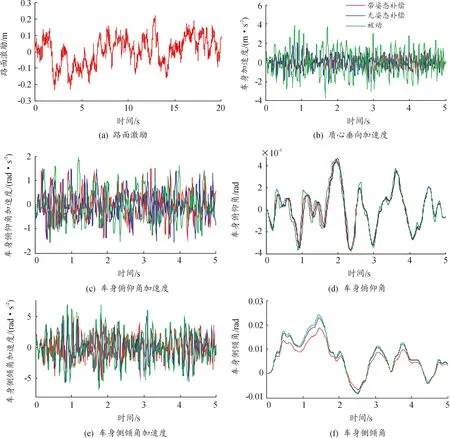
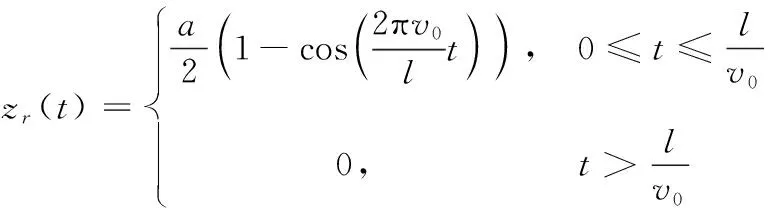
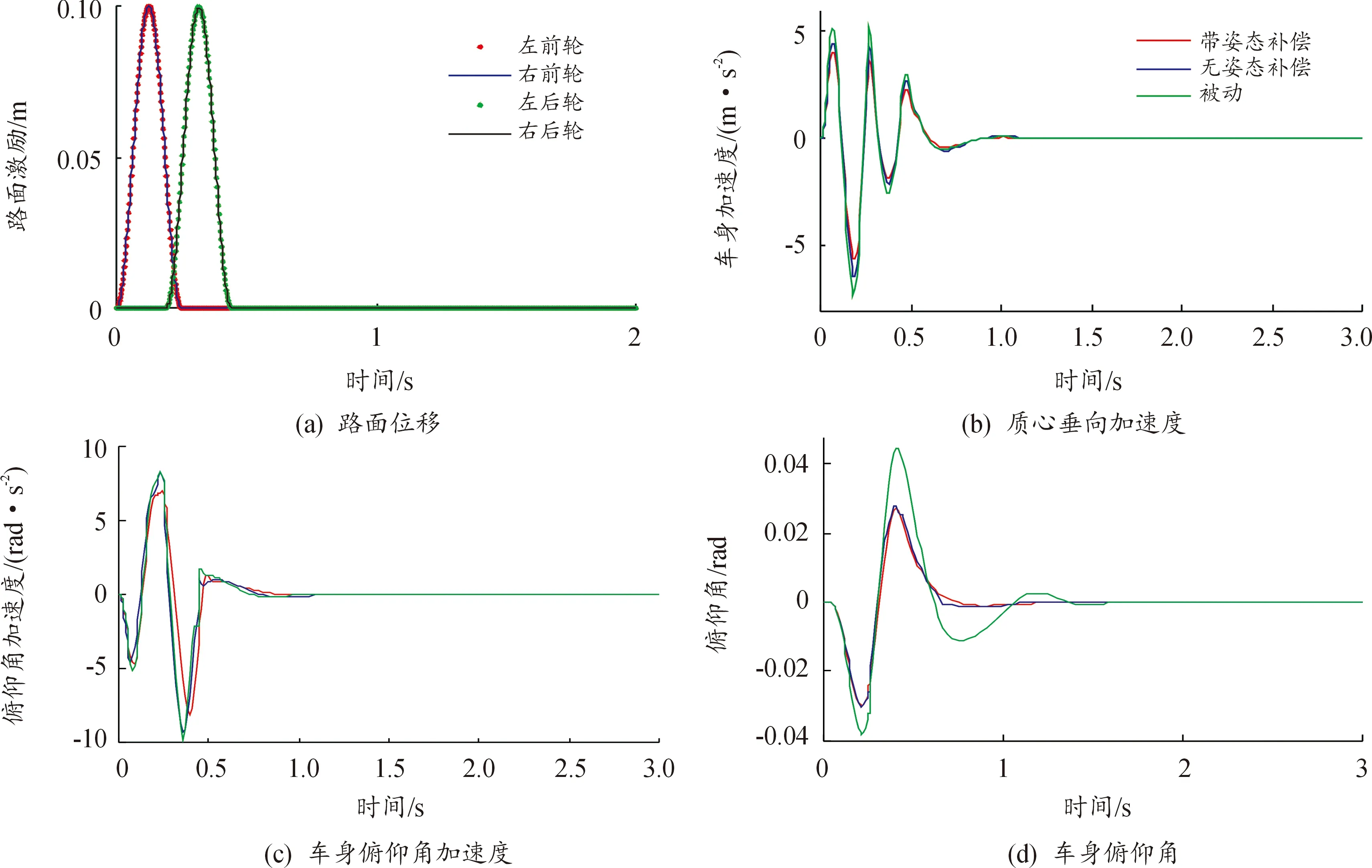
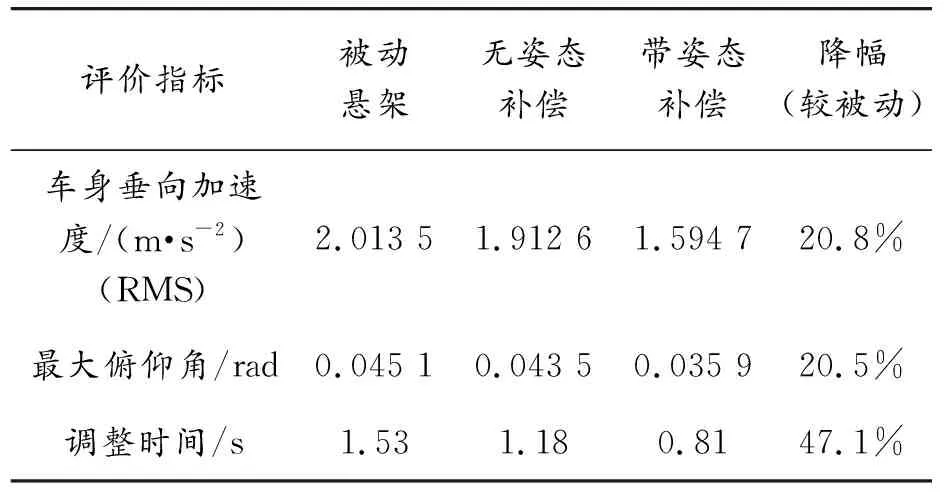
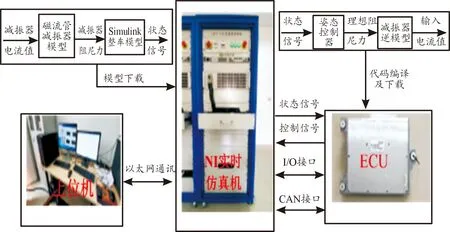
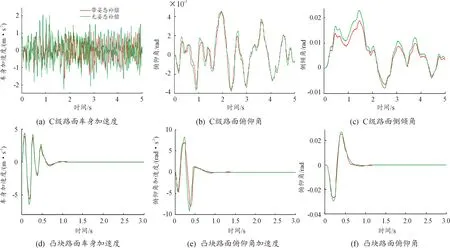
2)e2 β=1;α=e2/e3 (23) 3)e2=e3時, α=β=1 (24) 通過權重系數計算規則計算出α和β后,則根據式(16)求出各懸架修正阻尼力。利用式(25)判定各懸架修正阻尼力Fij′(i=F,R;j=L,R)是否在減振器阻尼力的有效范圍之內。 (25) (26) 則可得此時輸入磁流變減振器的電流I: (27) B、C級路面在我國公路等級中所占比例最大,且考慮到車輛動力學性能需求,往往路面等級越高則車速越高,反之越低。C級路面行駛車速往往在10~30 m/s。本文根據文獻[11]中的方法在Matlab/Simulink中建立C級路面模型,選取行駛速度為20 m/s,在此路面激勵下對采用本文設計的姿態補償控制算法、未采用姿態補償控制算法以及采用被動控制算法的車輛進行仿真對比分析,仿真結果如圖7所示。 圖7 C級路面仿真結果 根據表2可知:在C級路面激勵下,筆者提出的姿態補償算法可以對車身姿態變化有較好的抑制效果,因此認為此姿態補償算法是有效的。 表2 C級路面仿真結果 利用式(28)建立凸塊路面模型,令a=0.1 m,l=5 m,v0=20 m/s。對在此路面下車輛性能進行仿真對比分析,仿真結果如圖8所示。 (28) 圖8 凸塊路面仿真結果示意圖 由表3可知:采用姿態補償算法的車輛在凸塊路面行駛過程中可以有效抑制車身姿態惡化,且比未使用姿態補償以及被動控制算法調整時間更短,更快恢復穩態。 表3 凸塊路面仿真結果 受限于實驗條件及成本,以硬件在環實驗代替實車實驗,所使用的平臺為意昂神舟研發的HCU硬件在環測試系統。該系統由NI實時仿真機、控制器以及上位機組成。硬件在環實驗結果對于本文設計的控制系統可行性驗證具有重大指導意義。硬件在環[12]控制系統各部分組成如圖9所示, 圖9 硬件在環系統組成示意圖 上位機系統通過Matlab/Simulink建立整車及磁流變減振器模型,負責定義運行工況,輸入輸出信號,并實時監測仿真運行狀態,通過以太網實現與NI實時仿真機的通訊;NI實時仿真機下載并運行整車模型以及磁流變減振器模型,接收ECU控制信號,并輸出整車狀態信號;整車半主動姿態補償控制算法代碼通過編譯下載到ECU中,ECU接受NI實時仿真機傳遞的整車狀態信號,運算后輸出各減振器控制電流信號,完成閉環控制。 分別在C級路面、凸塊路面下20 m/s勻速行駛工況對筆者設計的姿態補償控制算法以及未采用姿態補償算法的車輛進行硬件在環試驗,將試驗結果進行對比,如圖10所示。 圖10 硬件在環實驗結果 由圖10可知,硬件在環實驗中采用姿態補償算法的車身垂向加速度、俯仰角均比無姿態補償的車輛有較大改善,且與仿真結果基本重合,誤差在可接受范圍之內。 1) C級路面下車身加速度相比于被動懸架減少了18.3%,車身俯仰角加速度降低了21.2%,車身俯仰角改善了11.4%;車身側傾角加速度減少了18.7%,側傾角也有較大幅度改善,為16.3%。 2) 凸塊路面下車輛車身加速度相比于被動懸架改善了20.8%,最大俯仰角改善了20.5%,且先于被動懸架0.72 s恢復穩態。 3) 硬件在環實驗結果與仿真結果基本一致,且都表明:本文提出的控制算法對提高汽車的平順性以及抑制車輛行駛過程中所發生的俯仰及側傾姿態惡化都有較好的控制效果。
3 半主動懸架控制算法性能仿真驗證
3.1 隨機路面下整車姿態補償控制效果分析

3.2 長坡形凸塊路面勻速工況性能分析
4 姿態補償控制算法硬件在環測試
4.1 硬件在環方案設計
4.2 硬件在環試驗結果分析
5 結論
