面向高精地圖應用的汽車前照燈偏轉控制研究
2021-12-14 07:40:18杜小芳楊賢誠夏婉揚
重慶理工大學學報(自然科學) 2021年11期
杜小芳,張 興,楊賢誠,夏婉揚
(1.武漢理工大學 汽車工程學院, 武漢 430070;2.現代汽車零部件技術湖北省重點實驗室, 武漢 430070)
汽車自適應照明系統是基于車輛的方向盤轉角和車速等信息計算得到汽車前照燈偏轉角度,從而通過偏轉車燈光軸減小彎道照明盲區[1]。也有的自適應照明系統是基于當前道路半徑計算偏轉角(如文獻[2]和文獻[3]中所推導的轉角計算公式)。隨著技術的進步,目前利用多傳感器和圖像識別技術計算車燈偏轉角的智能前照燈成為了熱門[4-5],如通過安全方程計算偏轉角,從而更科學地兼顧安全性與舒適度[6],這些研究雖然提高了彎道照明效果,但是車輛在即將進入彎道但尚在直線道路上時,汽車方向盤和前輪并未偏轉,因而前照燈也不會發生偏轉,所以無法提前使待轉區域的道路得到有效照明,不能提前獲取彎道的路況信息。另外,在車輛駛出彎道時也有類似的問題,這說明基于方向盤轉角或彎道半徑的自適應車燈系統存在滯后現象,同時在S形彎道中間拐點前,車燈光軸無法照射到拐點之后區域。
針對這些問題,提出一種基于規劃路徑的智能前照燈偏轉控制算法,結合高精地圖可實現車燈三維偏轉控制,此算法在直線和復雜曲線道路拐點前有良好的照明效果,并且對二維復雜曲線道路同樣適用。
1 車燈偏轉限制
在GB4599—2007《汽車用燈絲燈泡前照燈》中規定了城市四級公路的照明最低照度值為 5 lx,在此種亮度下,基本能滿足機動車駕駛員駕駛作業要求。在JTG D20—2017《公路路線設計規范》中規定標準車道寬度為3.5 m。根據這2個標準,計算得出前照燈光軸分割汽車行駛路徑曲線后所形成的曲線段到光軸的最大距離為2.25 m[7]。如圖1中所示,曲線ab上的點到汽車光軸直線ab的距離為h,h最大值為2.25 m,即車燈偏轉后的光軸不能偏離道路2.25 m以上。
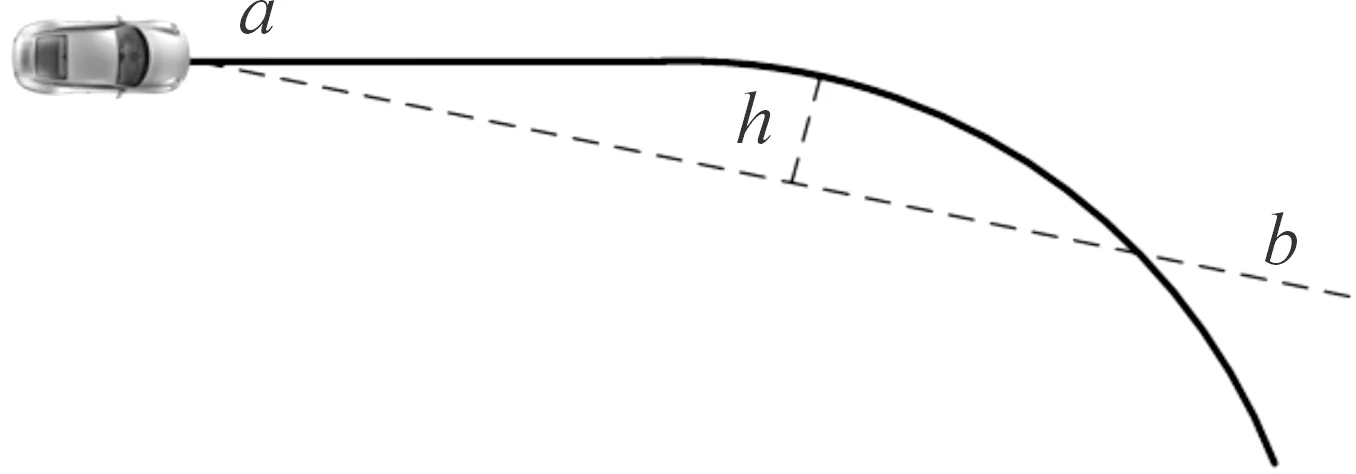
圖1 光軸在直線道路偏轉示意圖
根據GB/T 30036—2013《汽車自適應前照明系統》標準確定的配光標準,要求左右車燈偏轉后須滿足配光要求,即偏轉后光型不變,左右車燈的偏轉控制過程應相同且同步。除此之外,由于現代智能前照燈的設計趨于小型化,所以車燈的最大偏轉角度受空間結構影響也有一個極限值。
另外,由于防眩光等因素限制[8],前照燈光軸偏轉在垂直方向限制范圍為-3°~5°。
2 算法原理
2.1 三維路徑的分解
常用的路徑規劃方法有人工勢場法、柵格法、蟻群算法、遺傳算法等[9],利用規劃的路徑信息可得到汽車未來行駛路徑曲線,在三維高精地圖下可以獲取坐標點高程信息,于是可以得到三維路徑曲線。
采用投影法把三維路徑分成垂直面和水平面2個方向。如圖2所示,把三維路徑曲線L1分別向垂直平面ZOX和水平面XOY投影得到曲線L2和L3。
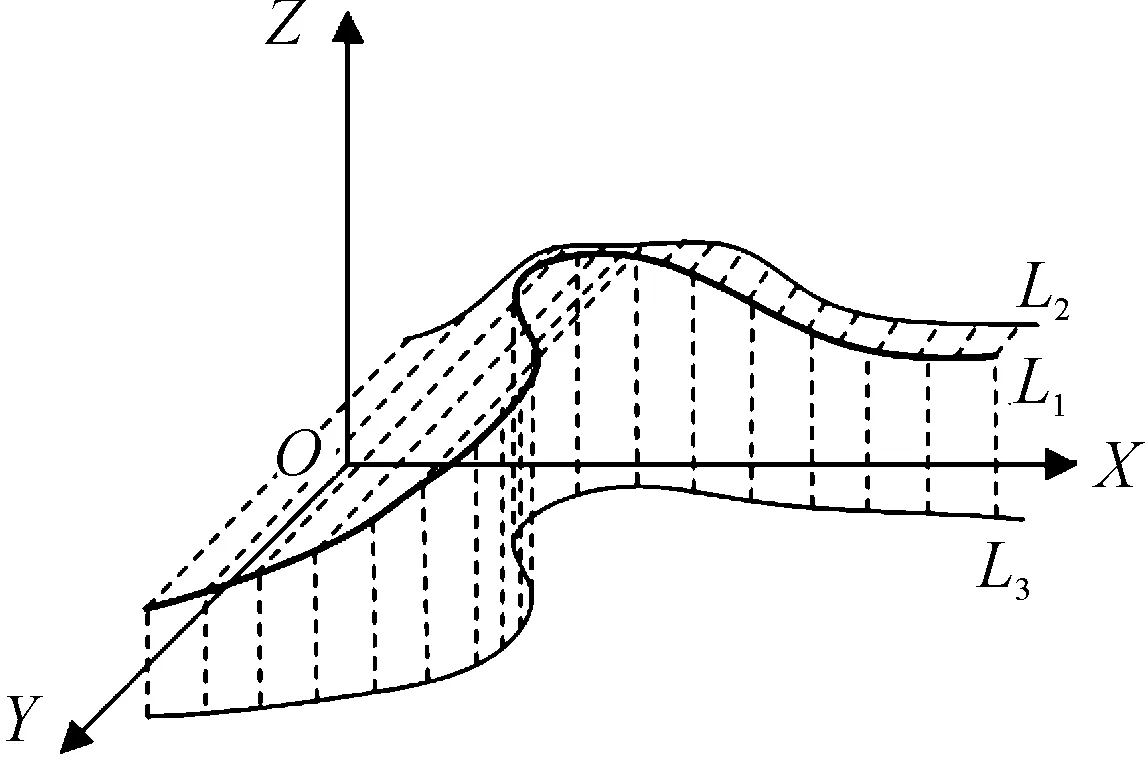
圖2 垂直面和水平面上的路徑投影
L2反映道路在垂直方向的形狀,L3反映道路在水平方向的形狀。通過分析可知L3曲線上各點坐標值分別為(x1,y1),(x2,y2)…(xn,yn),L2曲線上各點的坐標值為(x1,z1),(x2,z2)…(xn,zn)。
2.2 水平方向的控制
2.2.1控制原理
在水平方向上,前照燈的偏轉控制算法如圖3所示,設汽車所處的O1點坐標為(xt,yt),汽車在上一時刻的軌跡點坐標為(xt-1,yt-1)。定義O1A是探測線,其長度為L,O1A與汽車前照燈的光軸共線,與路徑曲線相切于O1點。用O1A線探測出未來行駛路徑上距離A點最近的點。
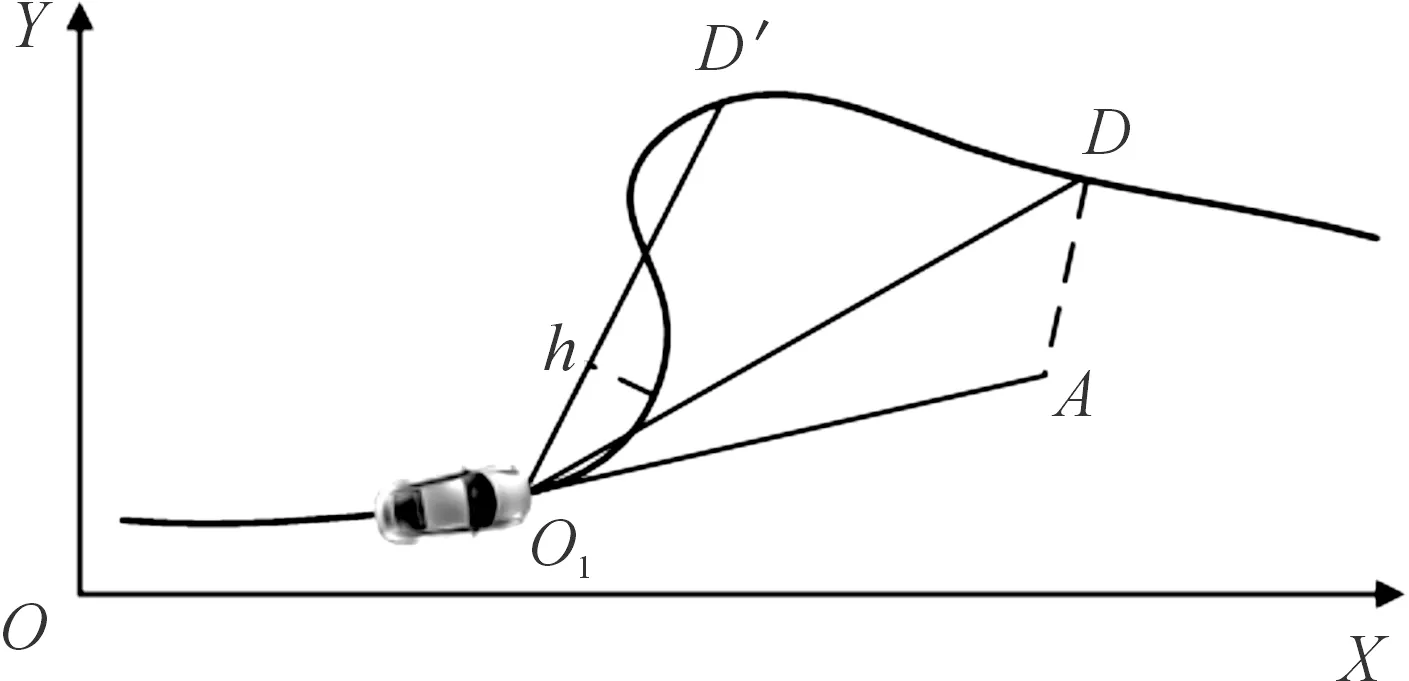
圖3 水平面內前照燈光軸偏轉示意圖
具體計算步驟如下:
1) 由于路徑曲線實際是由許多小線段組成,所以O1A的斜率kt等于O1點處小線段的斜率,即:
kt=(yt-yt-1)/(xt-xt-1)
(1)
式中:xt、yt為O1點橫縱坐標,汽車在上一時刻的軌跡點坐標為(xt-1,yt-1)。
此時利用下式可求得A點的坐標(xAt,yAt):
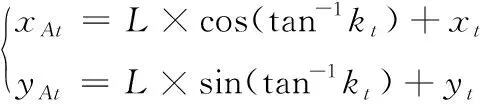
(2)
式中:L為O1A探測線的長度,kt為O1A的斜率,(xt,yt)為O1點坐標。
2) 在(xt,xt+L)范圍內找距離A點最近點,通過計算該范圍內的各個坐標點到A點距離來求出最小距離點。該范圍內某點(xt+n,yt+n)到A點距離為:
(3)
式中:xAt、yAt為A點橫縱坐標值,n為整數。
通過計算找出最近的點,該點的坐標就是D點的坐標(xD,yD)。
3) 光軸O1D的方程表達式為:
(4)
變形為:
(5)
式中:xD、yD為D點橫縱坐標,xt、yt為O1點橫縱坐標值。
路徑曲線段O1D上的某點(xt+m,yt+m)到光軸直線距離為:
(6)
式中:參數a=yD-yt,參數b=xD-xt,參數c=(xD-xt)yt-(yD-yt)xt。
(7)
2.2.2 汽車橫擺和車速對偏轉角的影響
汽車在轉彎行駛過程中,車身會發生橫擺運動(如圖4所示),產生一個橫擺角Yaw。通過分析得到:
(8)
化簡后為:
(9)
式中:m為汽車質量,R為轉彎半徑,ω為橫擺角速度,ay為側向加速度,可由車載加速度傳感器測得,v為汽車前進方向速度,t為時間,Yaw為橫擺角。
加上橫擺運動影響后偏轉角為:
(10)
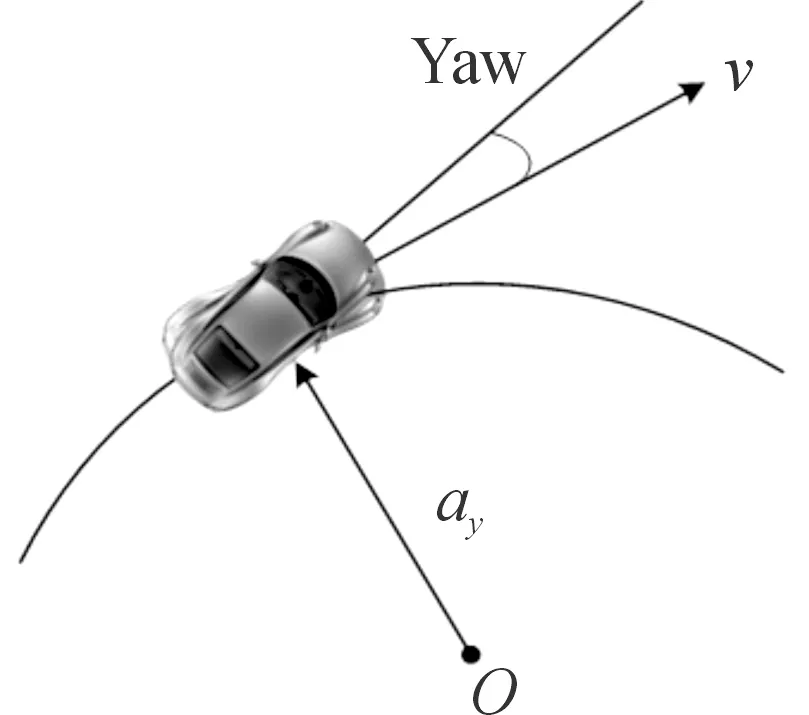
圖4 汽車橫擺運動示意圖
在前面論述的控制算法中,探測線O1A的長度L若改變,其探測的路徑上D點就會改變,從而改變偏轉角。在不超過h值限制條件的情況下,探測線長度越長,車燈偏轉后照射路線距離就越遠。為了實現動態調節探測線長度,根據文獻[10]中得出的汽車停車視距和汽車車速的關系式,用下式計算L值:
L=0.009 1v2+0.663 3v+0.368 2+8
(11)
式中:L為探測線O1A的長度,v為車速。
2.3 垂直方向的控制方法
垂直方向的光軸偏轉角計算方法與水平方向的計算方法相似,把y坐標換成z坐標即可,即以汽車坐標系縱軸為基準計算得到光軸理想偏轉角,具體不再重復論述。但是由于光軸向下偏轉會降低照明距離,所以按照上述算法計算后還需設置理想偏轉角不小于0°(定義向上偏轉為正)。
由于汽車車身的俯仰變化(如汽車加、減速時)會對前照燈光軸垂直方向位置產生影響,從而影響照明效果, 因此需要基于俯仰角修正理想偏轉角。
以車輛坐標系縱軸為基準,定義垂直平面內車頭上升時俯仰角為正,下降時為負,光軸向上偏時理想偏轉角為正,向下時為負,通過分析可得到:
γ=α-β
(12)
式中:γ為實際偏轉角,α為理想偏轉角,β為俯仰角。
3 電機控制與執行機構
3.1 步進電機控制
為了實現精確控制智能前照燈的執行機構偏轉,選用步進電機作為動力源。前照燈轉動角度與步進電機所需驅動脈沖數之間的關系為:
N=αei/q
(13)
式中:N為步進電機驅動器所需驅動脈沖數,α為前照燈轉動角度,e是細分控制數,i是從車燈轉軸到步進電機旋轉軸的機械傳動比,q是步進電機步距角。由此式可求得偏轉角每發生一次改變時步進電機應接收的驅動脈沖數。
產生步進電機驅動控制脈沖信號的模塊稱為PWM生成器,它以轉速、轉角或位移為輸入,輸出一定頻率和數量的驅動和方向信號脈沖[11]。搭建PWM生成器之前先建立頻率和相位可調的三角波,設計的三角波公式為:
(14)
式中:f為頻率,t為時間,ψ為相位,通過調節這些參數達到調節三角波參數的目的。
上述三角波與占空比數值進行邏輯“<”運算即可得到占空比、頻率、相位與三角波相同的PWM波形。然后建立方向脈沖信號:采用memory模塊,當下一時刻的偏轉值比當前時刻的大時,定義為正方向,當下一時刻的偏轉值比當前時刻的小時為負方向。
除此之外,還需要建立脈沖計數模塊。采用count up模塊充當計數功能,當發出的脈沖數量達到需求時改變占空比為0,PWM生成器將不再輸出驅動脈沖。由于每一時刻偏轉角都在變,所以每一時刻所需要的脈沖數都不一樣,計數模塊在計數完后應該歸零,以便于在下一仿真時刻重新計算脈沖數。使用Pulse生成模塊對計數器歸零控制,Pulse高電平時計數器歸零。需要注意的是,首先設置的Pulse周期應該與軟件仿真步長一致,其次在一個仿真步長內,發射完要求數量的脈沖所占用時間應該小于這個仿真步長,如果不滿足這兩個條件就會發生丟步現象。
最終搭建好的驅動模型如圖5所示,模型實現了有轉角輸入時可輸出特定數量的PWM驅動脈沖以及方向脈沖,并可調節脈沖頻率、相位和占空比。
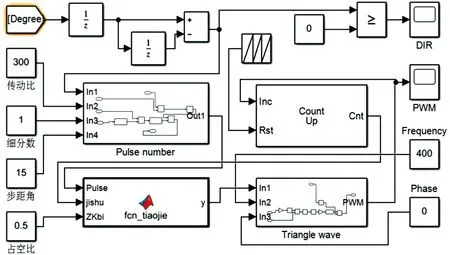
圖5 多參數動態可調PWM生成器驅動模型框圖
3.2 執行機構
步進電機并不是直接與車燈旋轉軸相連,需要添加機械傳動結構,如圖6所示。轉角控制精度是指一個脈沖能讓車燈轉動的最小角度。控制精度、步距角和機械總傳動比三者關系為
p=d/i
(15)
式中:p為轉角控制精度,d為驅動器接受1個脈沖時驅動電機轉動的角度,與細分控制數有關,i為機械總傳動比。
采用較大機械傳動比的原因有2個,一是因為前照燈實現車燈偏轉功能需要有較大的驅動力矩和穩定力矩來克服車燈體的轉動慣性;二是因為當前的前照燈由于體積和成本限制采用了開環步進電機,在步進電機不變時,根據式(15)得出通過增大傳動比來增大控制精度。

圖6 執行機構
4 實驗驗證
首先在Simulink中建立改進算法模型,模型中加入傳統自適應車燈算法模型,以便于進行兩者對比。與Carsim聯合后的模型如圖7所示。
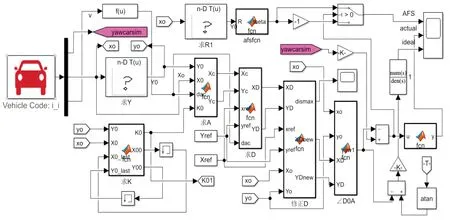
圖7 算法控制模型
采用電子地圖在武漢東湖生態區規劃一段路徑(如圖8所示),在這條路徑上提取了坐標點共 1 840個,由于改進算法是在平面直角坐標系下建立的,而電子地圖或定位模塊獲取的坐標值是球面坐標[12],所以需要把GPS坐標值轉為平面直角坐標值后才能計算分析。采用文獻[13]中的轉換方法,轉換時設置武漢地區UTM區號為50。將轉換后的坐標點導入Carsim中作為輸入二維數據。道路高程數據用周期為437、幅值為30的正弦函數生成。三維軌跡如圖9所示。
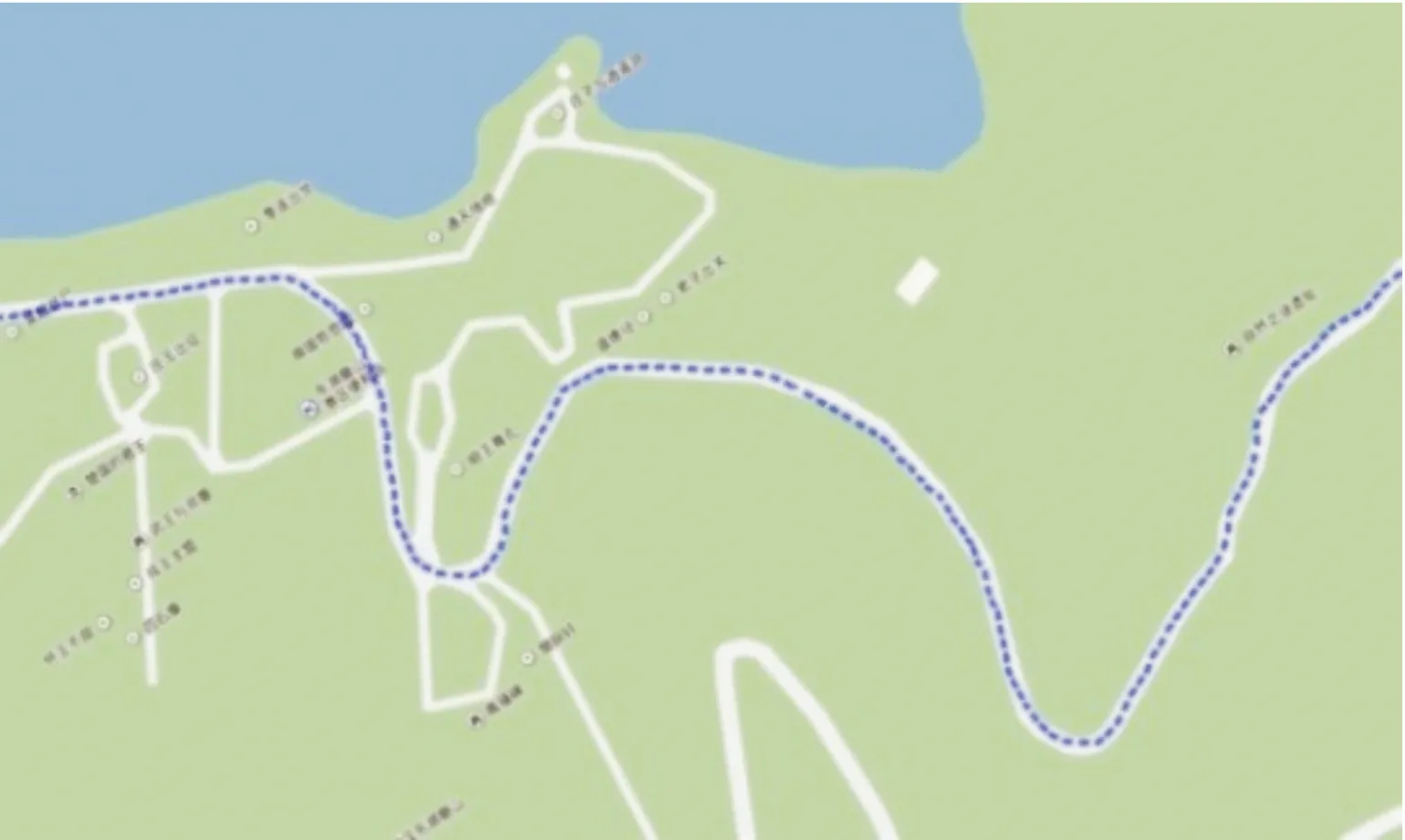
圖8 實驗道路
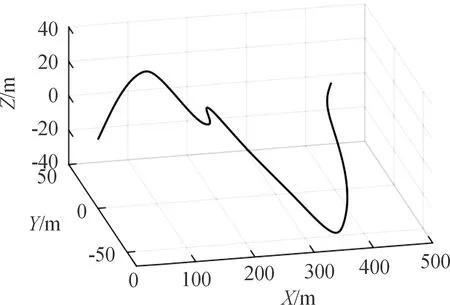
圖9 三維坐標下的路徑
實驗時選用的車型為Hatchback,為了防止出現因道路轉彎半徑較小而發生側滑現象影響實驗精度,設置車速為20 km/h。由于前照燈空間結構限制,車燈偏轉程度不能太大,所以設置向左或右偏轉極限值20°。水平方向的仿真結果如圖10、11所示。
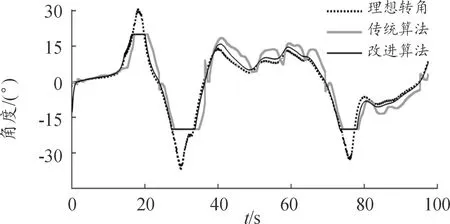
圖10 水平方向車燈偏轉角
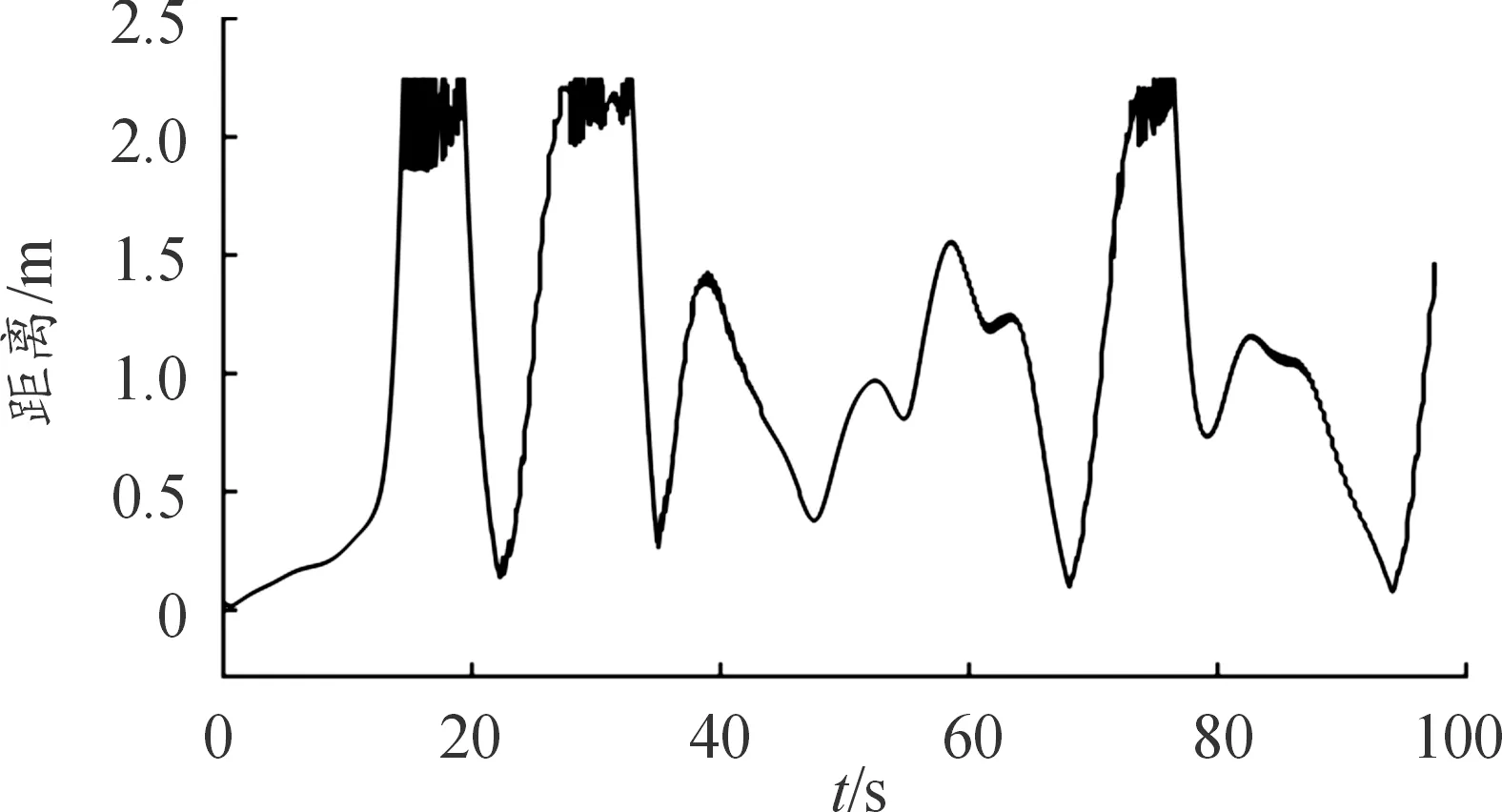
圖11 水平方向h最大值
圖10中,曲線“理想轉角”代表無汽車橫擺和無空間結構限制時由改進算法計算的前照燈偏轉角,曲線“傳統算法”和“改進算法”分別代表存在這2個影響因素時計算的偏轉角,其中傳統算法采用了文獻[7]中所述的基于道路半徑的車燈偏轉控制方法。
對比“理想轉角”和“改進算法”曲線可以看出,在不超過偏轉限制20°情況下,后者的偏轉角大于前者,而且彎道半徑越小,兩者差別越大,驗證了算法采用橫擺角修正的必要性;對比“改進算法”和“傳統算法”曲線,可以看到在18~19 s汽車即將進入第一個彎道,前者大于后者偏轉角,20~22 s汽車即將駛離彎道,前者小于后者偏轉角,驗證了在即將進入彎道和即將離開彎道時分別提前增大、調小轉角的功能;
在圖10中,40~60 s,汽車在S彎道,對比改進算法和傳統算法曲線可以看出,改進算法曲線較為平緩,解決了在S彎道中間拐點區域光軸轉角突變問題。圖11記錄的是每一時刻h值,可以看到在18、30、73 s附近時改進算法均對探測的D點做了修正,使h未超過2.25 m限制,消除了因過度偏轉而影響側邊照明問題,達到了預期效果。
垂直方向的偏轉值如圖12所示,γ代表改進算法計算的車燈實際轉角,β代表汽車俯仰角。可以看到,γ值滿足在俯仰角為0時,不為負數(即車燈不向下偏轉);在俯仰角不為0時,基于俯仰角對γ做了修正,且γ值未超過限制范圍[-3°,5°]。
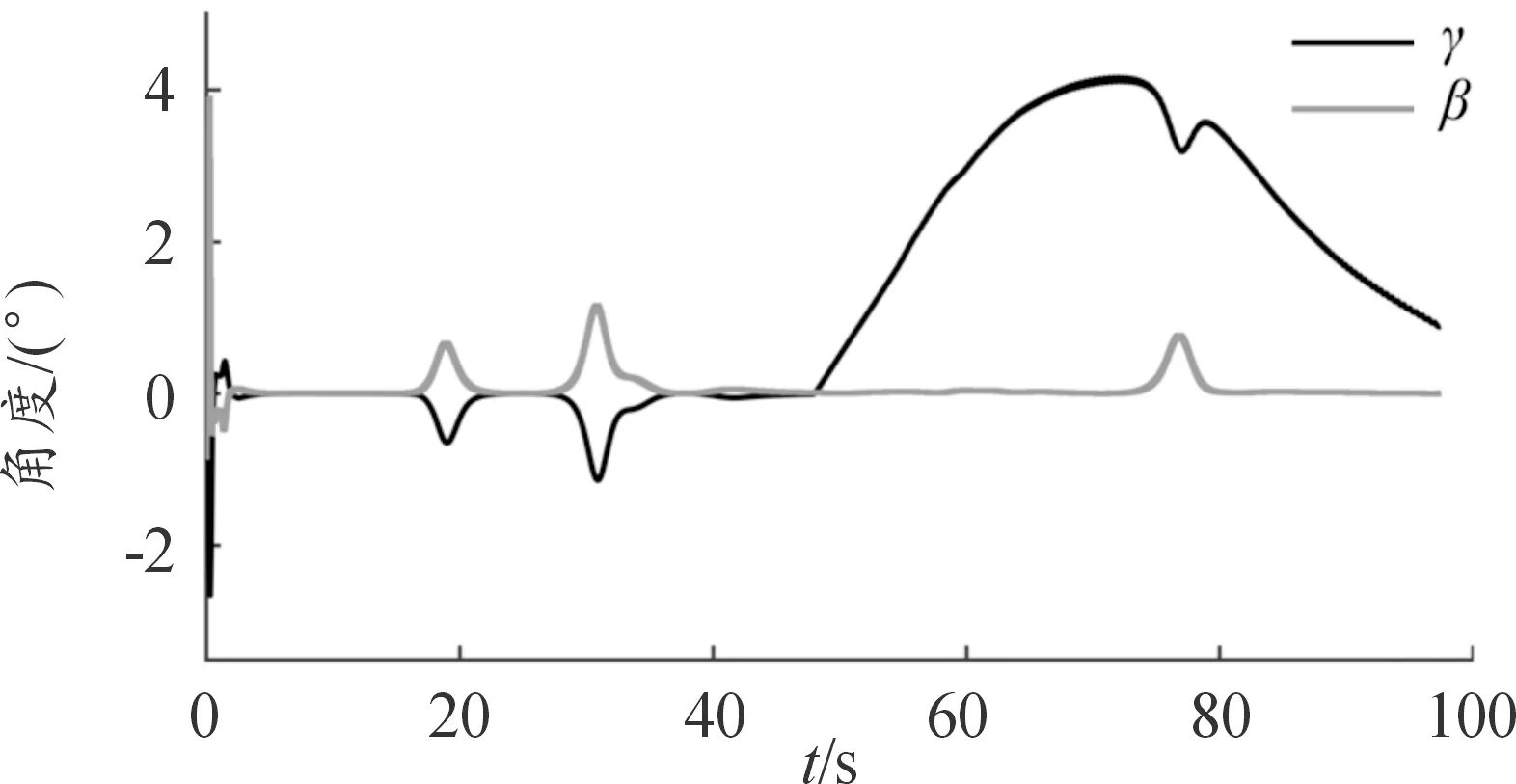
圖12 垂直方向偏轉角變化
為了更直觀地看到改進算法的照明效果,用Matlab編程記錄每一時刻的水平方向光軸和探測線位置,如圖13所示,藍色線代表偏轉后的光軸,灰色線代表探測線或無偏轉的光軸,可看出偏轉后的光軸(藍線)總是貼近于道路,顯著提高了照明效果。
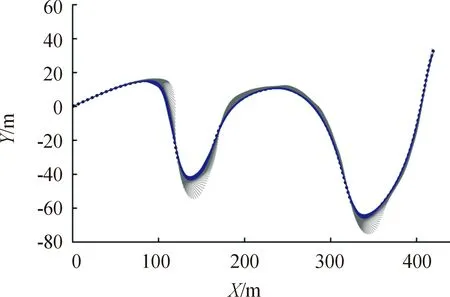
圖13 光軸和探測線位置
為了更進一步驗證改進算法實際執行效果,采用dSPACE設備進行快速控制原型實驗[14],由于垂直和水平方向所用的電機和PWM生成器相同,所以只驗證水平方向電機執行效果即可。與前面仿真不同的是,此實驗所采用的傳統算法是基于車輪轉角來控制車燈偏轉。實驗裝置如圖14,選用THB6128型步進電機驅動器,驅動電壓為12 V, 步進電機為PL25L,步距角為15°。驅動器與dSPACE的接線采用共陽極法。電機的細分控制與電機的信號頻率有關[15],根據該步進電機的矩頻特性設置脈沖信號頻率為400 PPS,采用1細分控制。占空比設置為50%,機械傳動比為300。
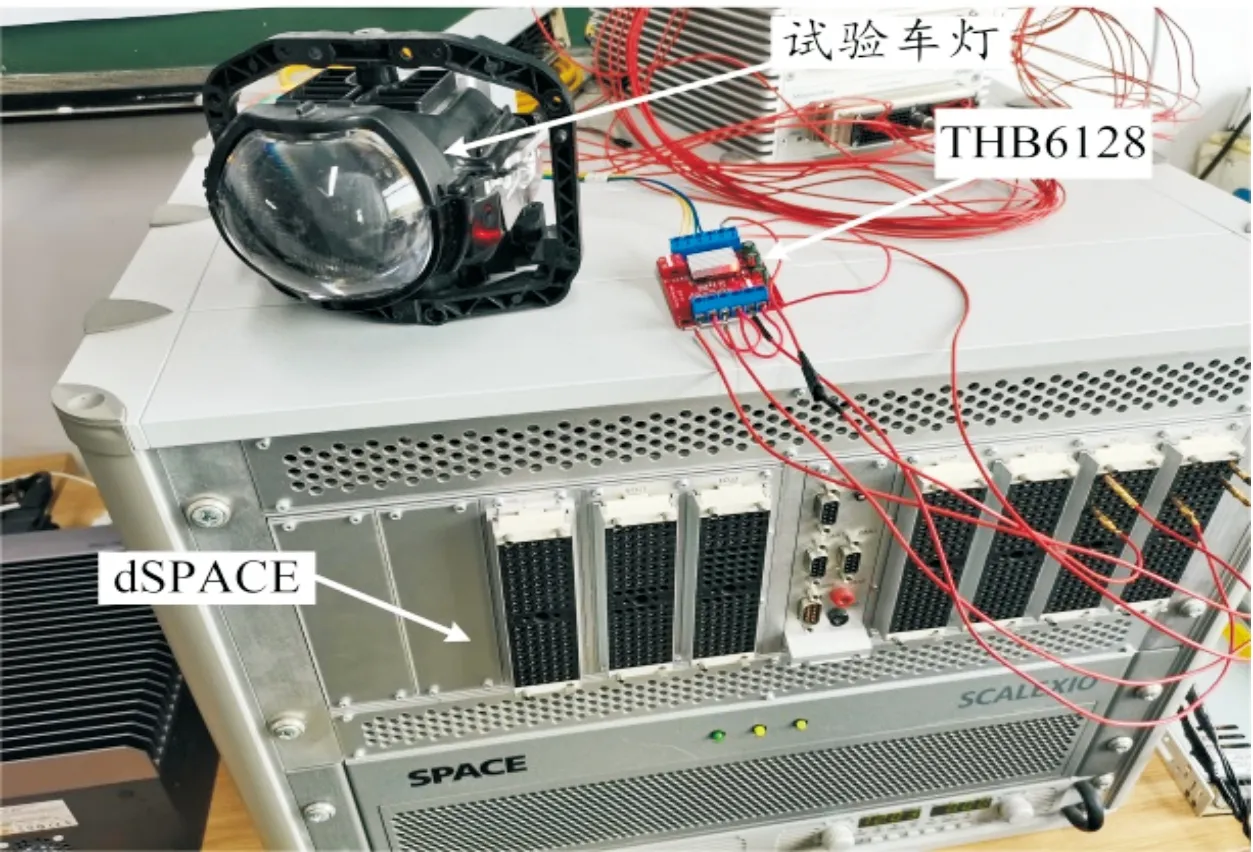
圖14 實驗設備
車燈偏轉響應曲線如圖15所示,在50~65 s和78~89 s內傳統算法的偏轉角達到了極限值20°,而改進算法小于20°,原因是道路半徑較小,此時方向盤和車輪轉角較大,所以當基于這些參數調節車燈時會產生較大的偏轉角。由于蝸輪蝸桿結構的鎖定作用,偏轉響應曲線沒有出現超調,符合使用要求。
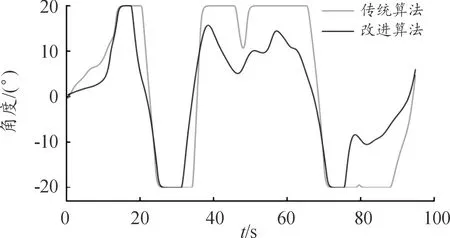
圖15 車燈偏轉響應曲線
圖16、17分別是在改進算法實驗時驅動器的方向信號和PWM驅動脈沖信號,在0~0.5 s,2幅圖中均出現了控制信號,而圖15中在該時刻內沒有產生偏轉角,原因是初始定位點誤差大,導致算法計算出車燈需在0.5 s內轉動15°,而電機驅動力無法克服這么大的轉動慣性阻力,所以沒有產生偏轉。但在其他時刻內實現了精確控制車燈偏轉。
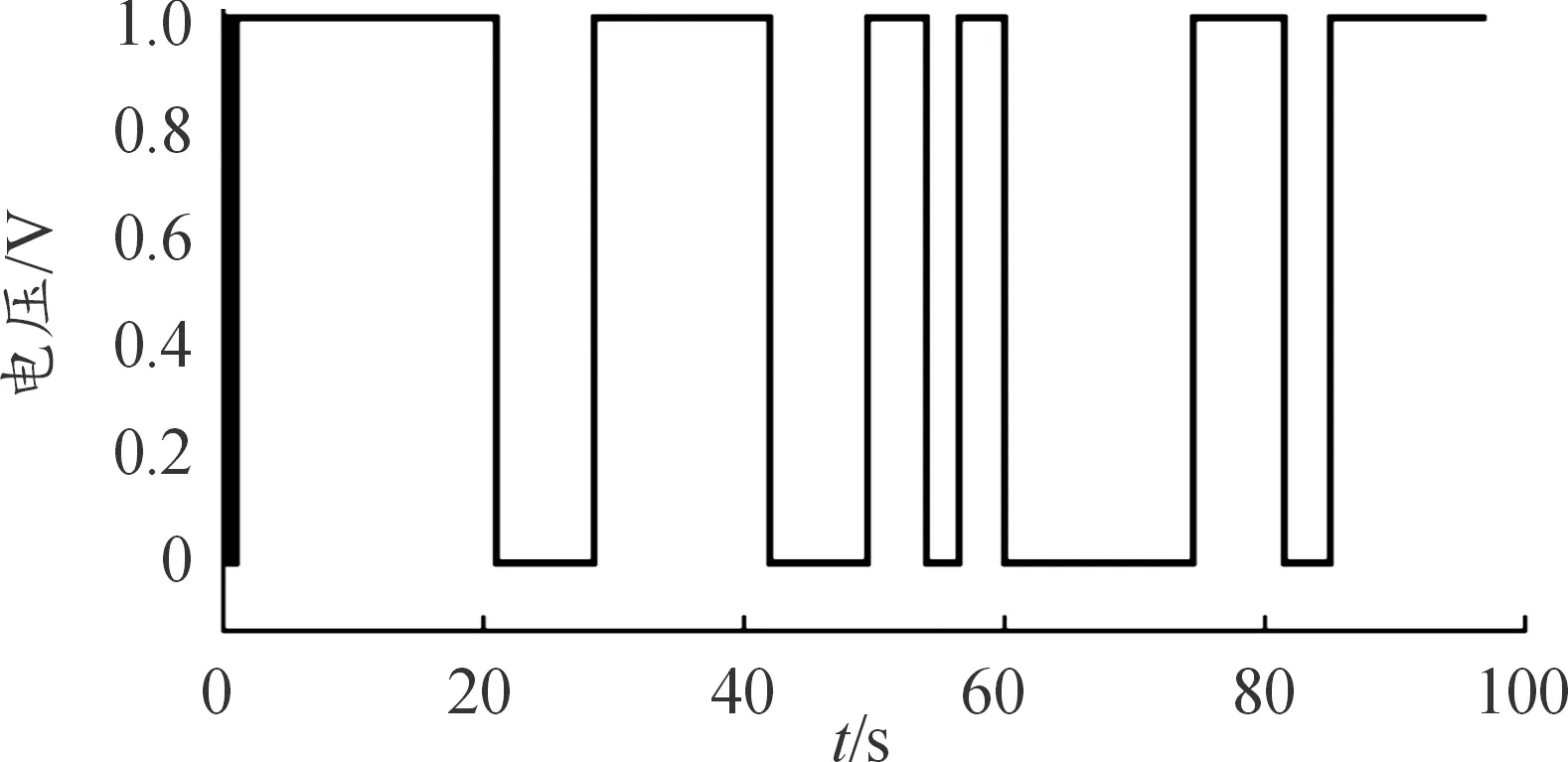
圖16 方向信號

圖17 PWM信號
5 結論
1)提出了一種基于規劃路徑的汽車智能前照燈偏轉控制算法,并在三維路徑上進行了實驗。結果表明:該算法可減小車燈在道路拐點區域的偏轉角突變程度,并提高水平和垂直方向的照明效果,充分發揮高精地圖的應用優勢。
2)該算法適應范圍廣,對于直線到曲線、曲線到直線以及S彎等復雜三維路徑也可以把光軸偏轉角約束在有效照明范圍內,顯著增加夜間照明效果。
3)針對步進電機的控制,設計了一種多參數動態可調的PWM生成器模型,為基于Simulink的電機驅動控制仿真和快速控制原型實驗提供了便利。
4)低延時和高精度的坐標定位信息是影響此改進算法照明效果的關鍵,今后將繼續深入這方面的研究。
猜你喜歡
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
汽車與安全(2019年9期)2019-11-22 09:48:03
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
小天使·一年級語數英綜合(2015年2期)2015-01-14 06:35:05
決策探索(2014年21期)2014-11-25 12:29:50
