AEB行人檢測系統的設計與驗證分析
2021-12-14 07:40:24謝旭敏
重慶理工大學學報(自然科學) 2021年11期
張 新,謝旭敏
(長沙理工大學 車輛與機械工程學院, 長沙 410114)
我國每年重特大事故中交通事故數和因交通事故死亡人數分別占到69%和78.9%,全球因道路交通事故造成的人員傷亡逐年遞增。為了降低該風險造成的危害,汽車自動緊急制動系統(autonomous emergency brake,AEB)在汽車上的安裝率也越來越高[1-2]。
AEB行人系統通過汽車上的傳感器識別并跟蹤行人軌跡,若有碰撞危險系統則發出預警信號并自動采取制動措施使汽車停止,從而保護道路環境中的行人[3-5]。
為了對AEB系統的性能進行系統測試及評價,我國發布實施《中國新車評價規程(C-NCAP)管理規則》對AEB行人系統測試進行了系統規范[6]。這對于完善AEB行人系統的標準、降低交通環境中行人的受傷幾率具有實際的價值。
為了驗證和評估AEB行人檢測系統的性能,國外相關研究結構開發了多種AEB行人測試裝置[7-8]。奧地利4active System公司開發的AEB行人檢測裝置通過伺服電機驅動,結構較為緊湊但靈活性較差,實驗操作不便。英國ABD(Anthony Best Dynamics)公司開發的AEB行人檢測裝置采用盤式電機驅動,靈活性較好,但成本較高。
上述AEB行人檢測設備可以較好地評估歐美地區交通環境下的典型危險場景,但與我國道路行人行為習慣存在較大差距,設備和維護成本較高,不符合我國AEB行人系統的開發和測試要求。
本文針對我國AEB行人檢測系統的測試需求,設計了AEB行人檢測系統,可以很好地契合C-NCAP的測試規定,系統測試場景可基于我國行人習慣靈活調整,并通過多次測試進行有效性驗證。測試結果表明:所設計AEB行人檢測系統滿足相關測試要求,可以作為AEB功能測評和相關產品開發的支撐工具。
1 系統整體方案設計
1.1 AEB行人系統測試
針對AEB行人測試系統,C-NCAP測試規程設定了4種典型測試場景[9]:遠端碰撞CVFA-50、CVFA-25和近端碰撞CVNA-25、CVNA-75。
如圖1所示,假人目標與測試車輛中心線之間的水平距離為D=6 m(遠端)和D=4 m(近端)。測試汽車行駛速度vv為20、30、40、50、60 km,假人移動速度為5、6.5 km/h,其移動方向與測試汽車呈垂直狀態,在汽車頭部寬度的25%處(M點)、50%處(C點)和75%處(K點)分別進行碰撞測試。
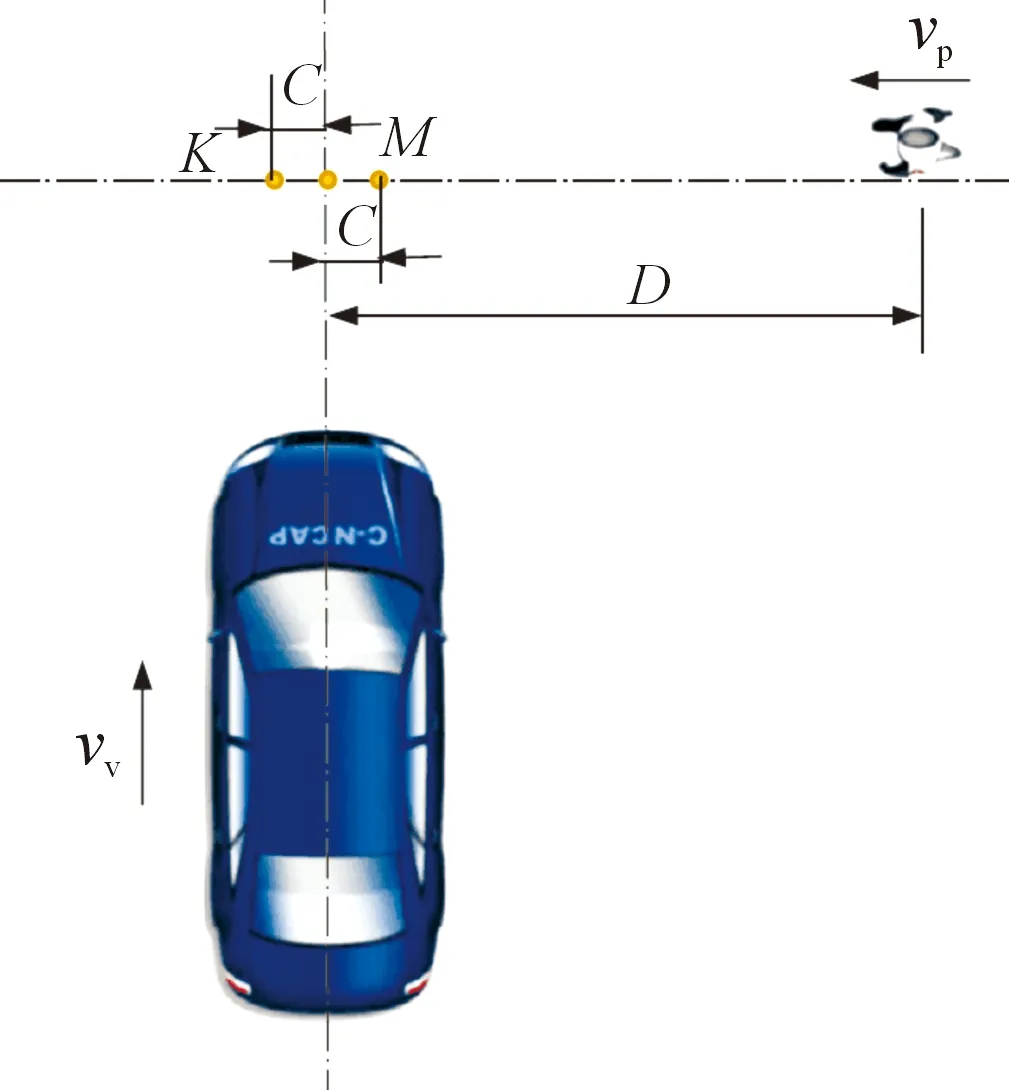
圖1 測試場景示意圖
C-NCAP規范中的AEB行人測試場景是基于歐美地區交通事故數據建立的,與我國行人交通習慣存在較大差異,因此需建立適合我國行人交通行為的測試方案,為此設定如下2種測試場景[10-11]:
1) 近距離測試場景(CPN):汽車速度為5~25 km/h,假人和測試汽車的距離為7 m。
2) 遠距離測試場景(CPF):測試汽車速度為10~60 km/h(10 km/h為間隔),假人與測試汽車的距離為20 m。假人移動速度為5.4 km/h,碰撞位置為汽車50%位置處。
1.2 測試方案設計
針對C-NCAP以及行人測試相關的規定,行人檢測系統應當具有如下功能:
1) 目標假人可在驅動系統的作用下沿一定速度行駛;
2) 駕駛機器人能夠控制汽車按一定的速度和路線行駛;
3) 為了使假人與測試汽車發生指定位置的碰撞,假人與測試汽車互聯互通保持實時通訊。
根據上述的功能需求,設計了如圖2所示的系統架構。將假人固定在托板上,借助牽引帶驅動假人和托板移動,并在假人驅動系統和測試汽車上安裝通訊設備,借助實時動態基準站完成汽車與假人速度、位置的信息交互,滿足測試場景的碰撞要求。
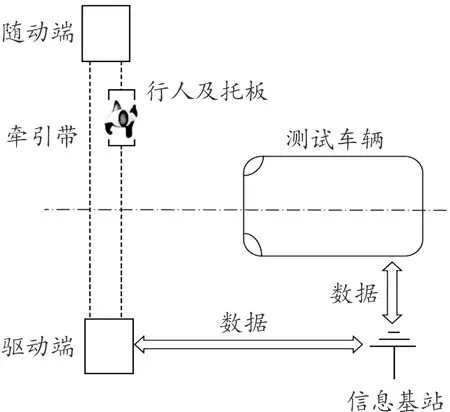
圖2 系統架構
根據C-NCAP的規定,假人移動速度為5、5.4、6.5 km/h,測試車速在5~60 km/h,汽車行駛方向與假人移動方向保持垂直。
2 硬件實現過程
2.1 假人目標優化
如圖3所示,基于C-NCAP的尺寸規定分別設計了成人假人目標和兒童假人目標,并在假人表面涂抹紅外反射二氧化鈦IR-1000,能夠在850~910 nm,使假人的紅外反射率達到40%~60%,有效提升了假人的視覺和紅外特性[12]。
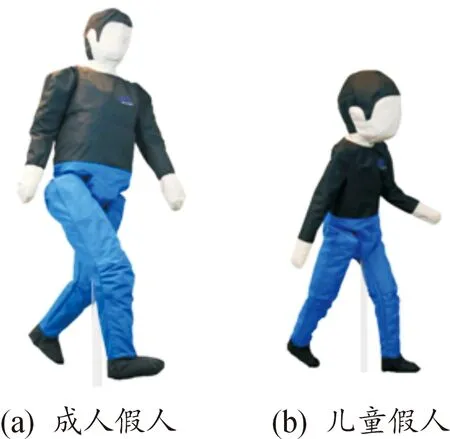
圖3 假人目標
2.2 假人目標驅動機構
假人驅動機構分為牽引帶、驅動端、隨動端以及托板。其中,托板上配置磁鐵單元,可以讓假人支撐桿借助磁性的作用與托板緊密結合,以便支撐假人直立移動,其結構如圖4所示。當測試汽車碰撞到假人時,磁性連接中斷,假人脫離托板,避免損壞其他部件。
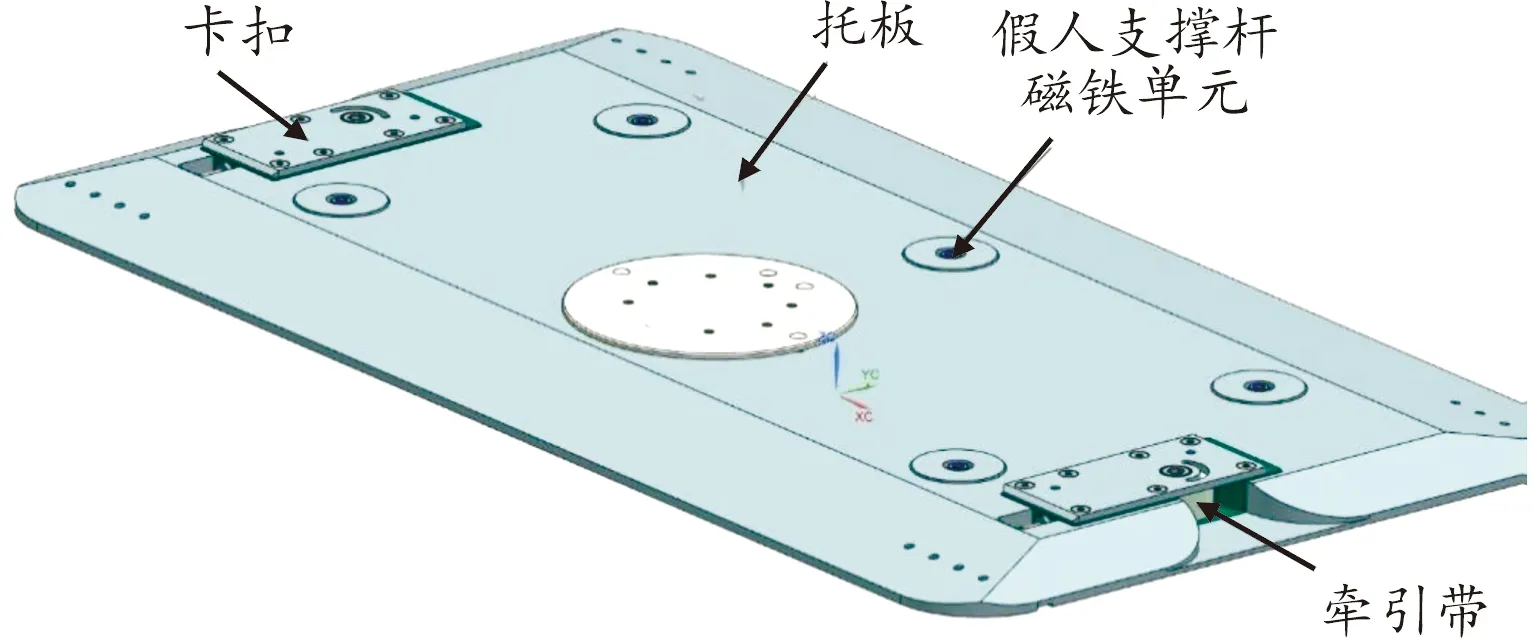
圖4 托板結構
如圖5所示,牽引帶驅動端的組成部分主要有電源、無線通訊部分、控制器以及驅動電機。
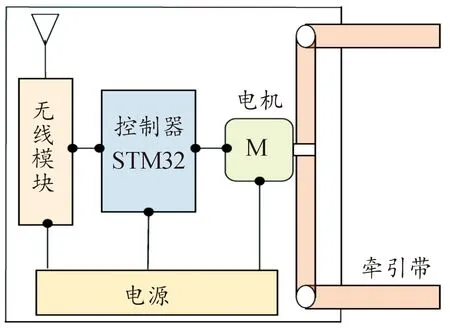
圖5 驅動端結構
假人目標驅動系統結構如圖6所示,汽車速度和位置信息由無線通訊模塊傳遞給控制器,控制器根據獲取的數據驅動電機運轉,帶動牽引帶開始工作,實現假人位置的移動。
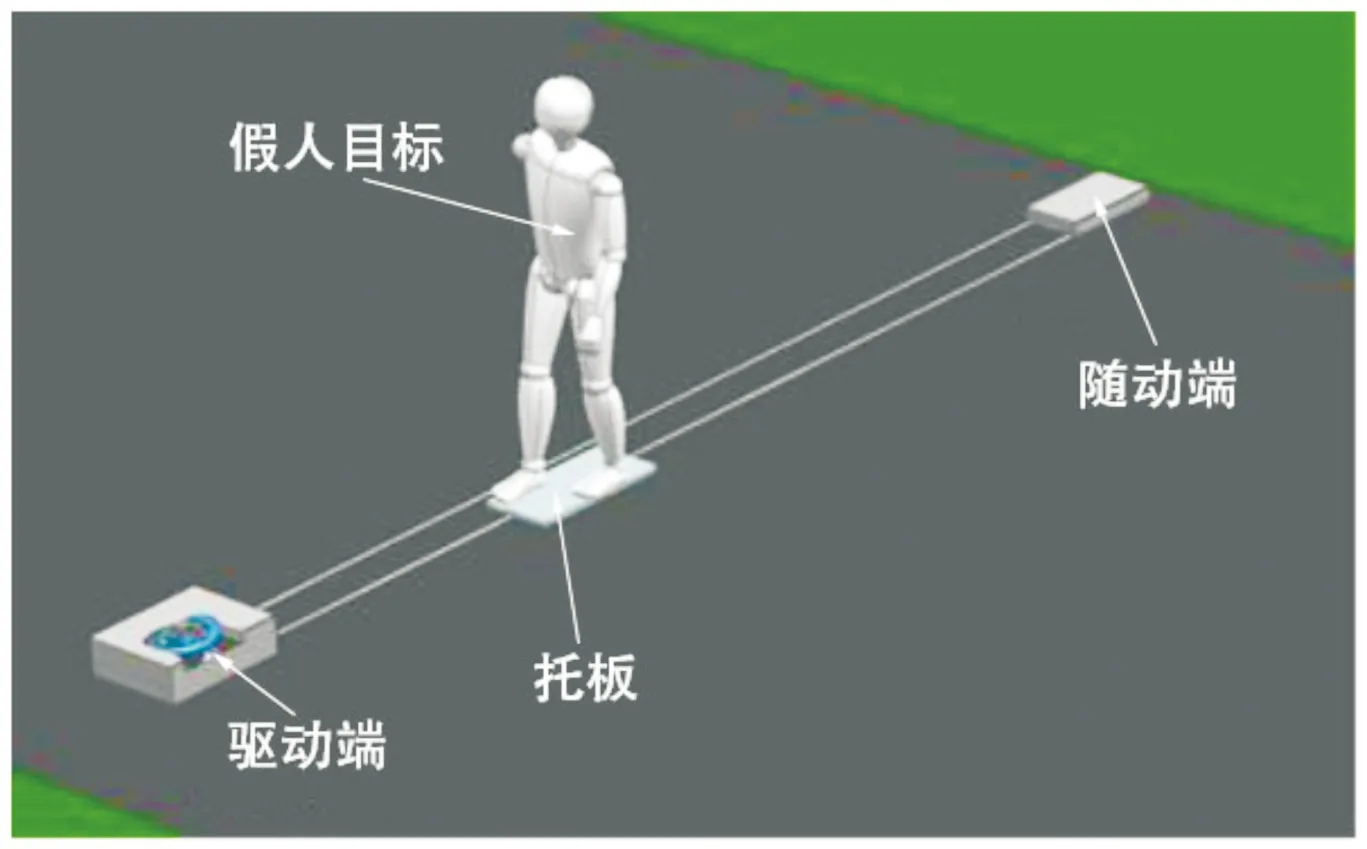
圖6 假人目標驅動系統
3 開發控制系統
3.1 系統的控制策略
按照AEB測試法規要求,在控制汽車的自動駕駛機器人上安裝慣性導航儀和差分精確定位裝置,分別測量出汽車的實時加速度、速度、偏航角以及汽車的精確位置,并通過無線通訊模塊,最終將收集的數據傳輸到AEB行人檢測系統。
AEB行人檢測系統對比測試規程對汽車速度、假人速度以及碰撞位置的規定,計算出假人應當啟動的精確時間。
假人在移動過程中,驅動裝置可以根據測試汽車的狀態和位置,實時通過驅動電機進行加減速控制,最終使假人和測試汽車的運動關系符合測試法規的要求,發生指定位置的碰撞測試。
AEB行人檢測系統和自動駕駛機器人之間有2個通訊通道,通過915 MHz信道頻率,實時動態(RTK)基準站可將GPS定位信息發送到AEB行人檢測系統以及汽車的駕駛機器人;通過2.4 GHz信道頻率,駕駛機器人則將汽車的位置、速度信息傳輸到AEB行人檢測系統。AEB行人檢測通訊及控制過程如圖7所示。
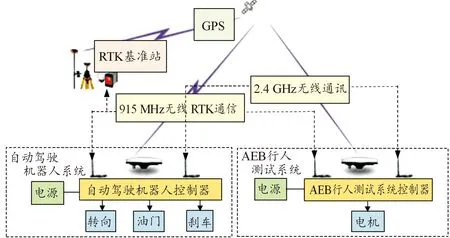
圖7 AEB行人檢測通訊及控制過程
3.2 設計差分定位模塊
一般GPS定位誤差大于3 m,不能滿足測試要求的精度,為此借助差分定位方法來精確定位汽車和假人目標[13]。差分定位模塊分為RTK基準站和移動站2個部分,RTK基準站放置在空曠的區域,在測試汽車和假人目標上均安裝移動站。RTK基準站收集基本的GPS定位數據,然后將信息傳輸給移動站,移動站基于自身的GPS定位信息和RTK基準站發送的GPS定位信息,通過載波相位差分解算的方法,最終獲得cm級的定位信息,進而控制駕駛機器人和假人目標驅動系統,滿足測試場景對兩者相對運動的要求。
3.3 設計假人驅動控制器
AEB行人檢測系統控制器通過接收測試汽車的位置、速度信息,實時分析比較汽車位置是否與控制器計算要求的觸發點保持一致,以此判斷是否驅動假人開始移動。假人移動觸發后,通過采用與測試場景相匹配的電機驅動算法,控制器可以實現對假人位置的精確控制。控制器的主控芯片(STM32F767)可以接受各模塊發送的數據信息并進行處理,被控芯片(STM32F103)可以精確地控制電機轉速。圖8是控制器的結構和相關模塊。
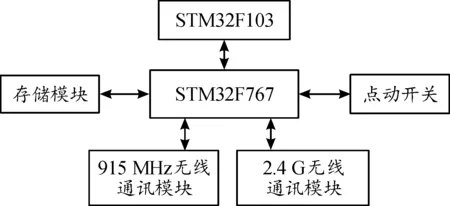
圖8 控制器結構
3.4 假人驅動算法
AEB行人測試場景中,假人有加速、勻速以及減速的不同過程,假人驅動控制系統在控制假人運動速度的同時,需精準控制假人的運動位置,以便將假人傳送到指定的位置。為此本文設計了如圖9所示的S型曲線加減速驅動控制算法,將加減速過程細化為:加加速、減加速、勻速、加減速以及減減速等5個階段,速度變化率J的絕對值保持不變,加減速模式在任意位置的加速度都連續變化,速度曲線平滑,可避免柔性沖擊。
圖9中t1到t3為各個階段的運行時間。由于J為恒定值,在加速階段和減速階段之間,速度應保持不變,則加加速、減加速、加減速與減減速經歷的時間相同,即t1=t2。

圖9 S型曲線加減速模型
設vs為初速度,ve為末速度,根據運動學關系,假人的加速度a、速度v以及位移S計算公式如表1所示。
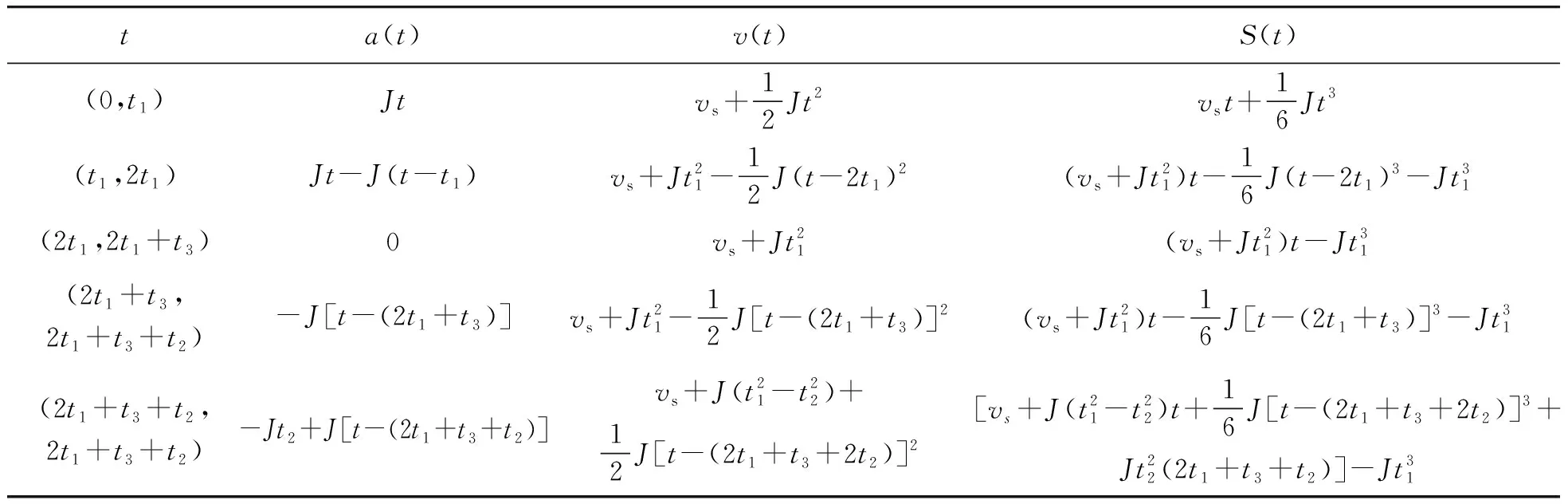
表1 參數計算公式
3.5 系統聯動控制
1) 計算系統觸發點。基于AEB行人檢測系統的差分精確定位系統和假人檢測系統移動站獲取假人初始位置P0、碰撞點P1坐標的(x1,y1)和(x2,y2)。另外,由測試汽車移動站獲取測試汽車頭部中點處坐標V1(x3,y3)和航向角R。由車速v及假人移動到碰撞點所需的時間T(D1/Vp),計算得出系統觸發點M的坐標(x4,y4)。

3) 系統聯動測試。駕駛機器人系統實時更新汽車車頭中心點V1(x3,y3)的坐標,并通過無線模塊發送相關數據至AEB行人檢測系統,然后由AEB行人檢測系統實時將V1點與M點坐標值進行比對,當x3=x4并且y3=y4時,AEB行人檢測系統觸發假人目標移動,假人驅動控制器控制假人目標按該測試場景調節電機轉速,最終實現測試汽車行駛到P1點時,假人移動到P1點。系統聯動控制如圖10所示。
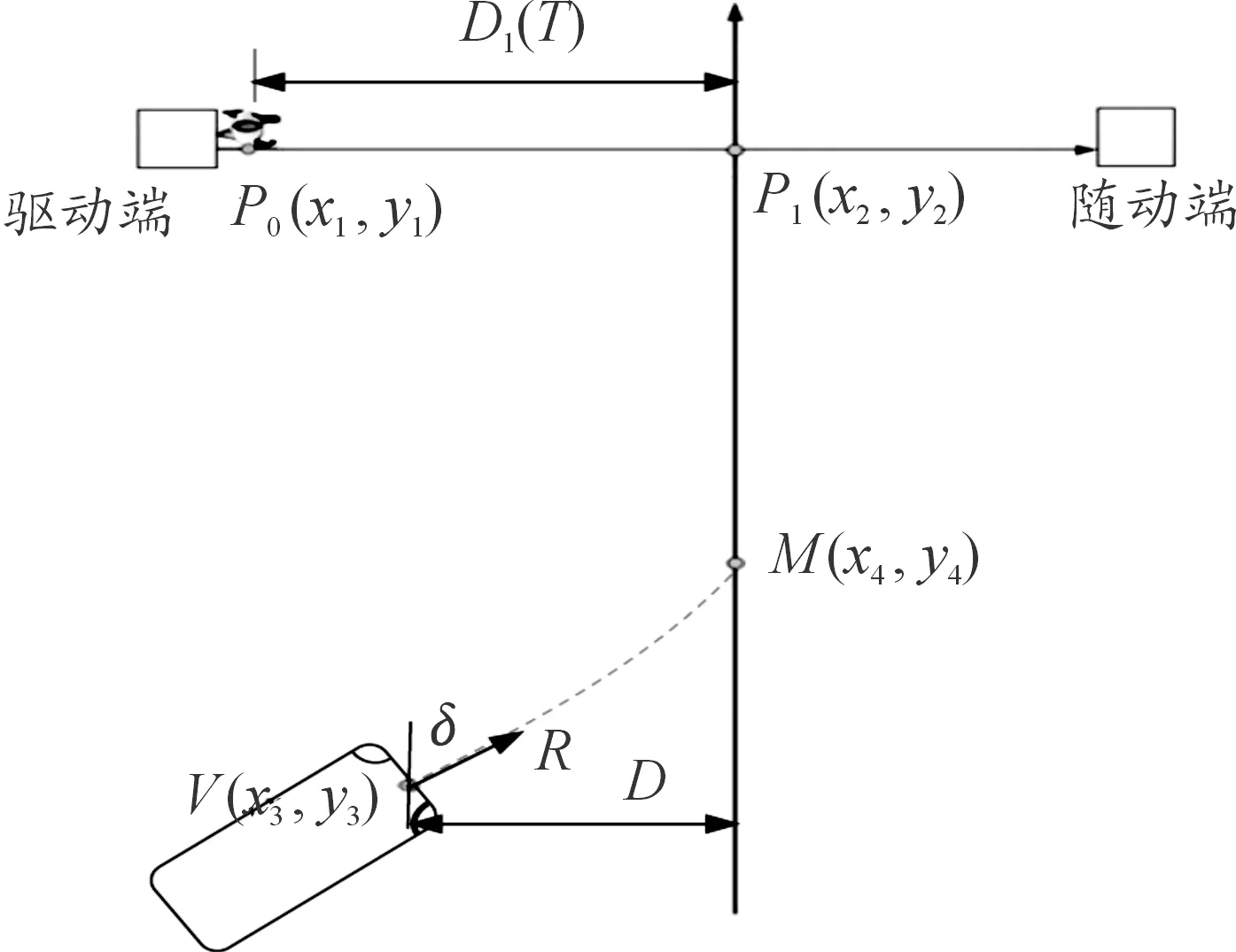
圖10 系統聯動控制示意圖
4 系統測試及驗證
為了對AEB行人檢測系統進行驗證,按照C-NACP規定的行人測試場景進行行人危險工況測試實驗,以驗證AEB行人檢測系統對假人目標位置、速度的控制精度以及AEB行人檢測系統與測試汽車的無線通訊性能。
如圖11所示,首先進行單功能測試,在不同測試場景下,AEB行人檢測系統不與駕駛機器人聯動,測試電機控制算法對假人的驅動控制精度。

圖11 AEB行人單功能測試場景
每種測試場景進行3次實驗,由于不同測試場景下假人與測試汽車的距離要求不同,一共完成了(4+11)×3=45次實驗,相關測試結果如表2所示。基于實驗結果計算出的假人目標控制精度達到96%(控制精度=符合要求實驗測試/總實驗次數)。由此表明,本文所設計的AEB行人檢測系統可以根據測試要求對假人移動過程實現精確控制。
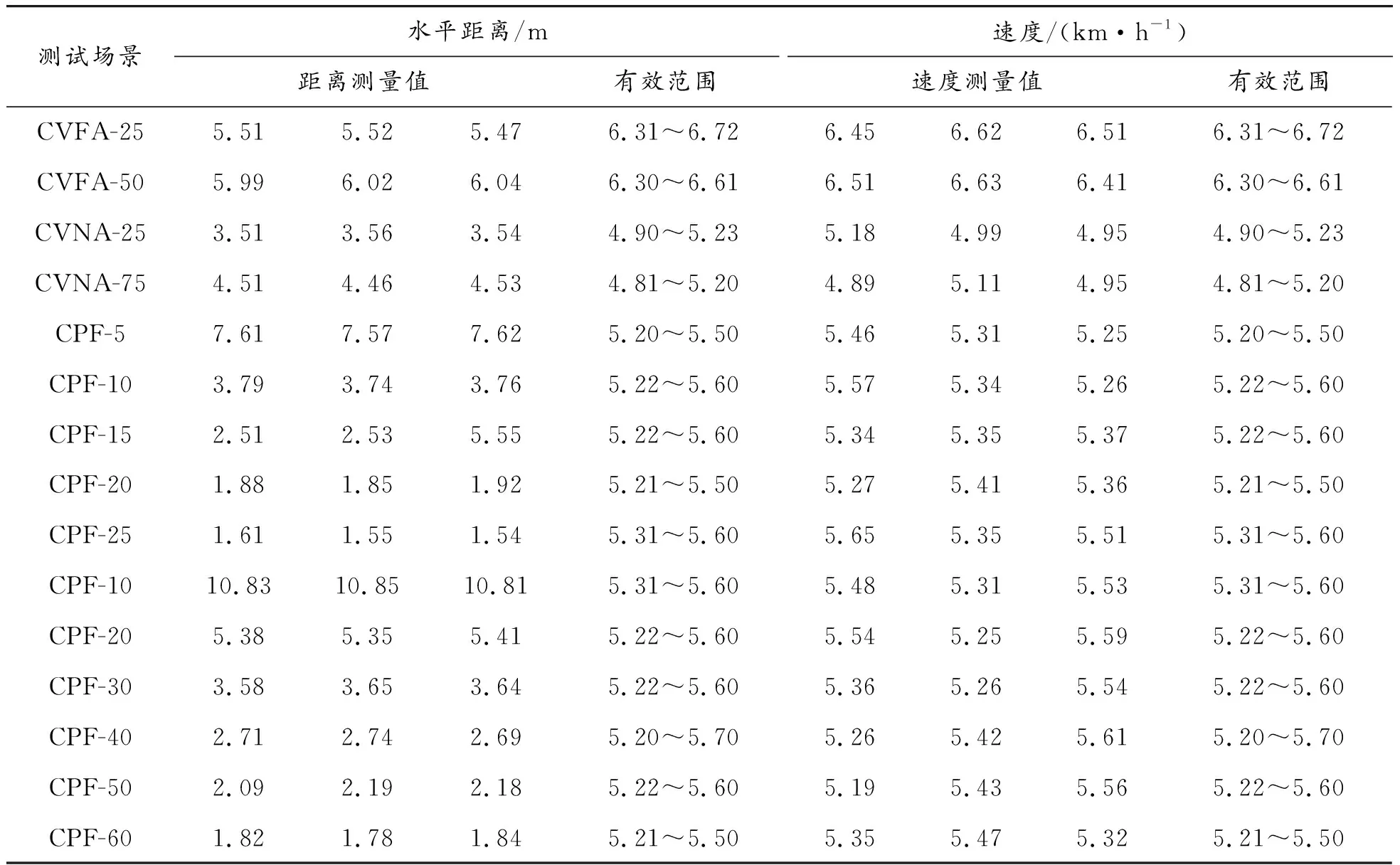
表2 假人移動速度和位移測試
如圖12所示,在單功能測試完成后,將AEB行人檢測系統與駕駛機器人聯通,測試之間的無線通訊性能,查看假人與測試汽車的碰撞點是否滿足測試場景的法規要求。

圖12 AEB行人檢測系統聯動測試場景
根據C-NCAP測試規程進行20次實驗(測試車速在20~60 km/h范圍,每種測試場景進行5次實驗),根據國內測試場景要求進行11次實驗,共進行31次測試實驗,測試結果如表3所示,表中的數字表示第幾次實驗完全達到測試場景規定的碰撞速度、位置等關鍵指標。
根據表3的統計情況可知,1次實驗即達到要求的概率為90%,2次實驗即達到要求的概率為100%。

表3 AEB行人檢測系統聯動測試結果
在測試過程中,AEB行人檢測系統對假人速度以及假人與測試汽車碰撞位置的準確度達到96%,由于地面摩擦力不均及牽引帶的彈性不可控,在單功能測試45次實驗中,有2次出現誤差大于精度有效范圍的情況,但其綜合誤差仍然較小,可以滿足測試法規對于精度的要求。
在對AEB行人檢測系統和駕駛機器人進行聯動測試中,除了3次由于AEB行人檢測系統與駕駛機器人的無線通訊被其他設備干擾外,兩者之間的無線通訊始終保持良好狀態。由此可知,應當在空曠無干擾的環境下進行AEB行人測試實驗。在無其他通訊干擾的情況下,AEB行人檢測系統可以較好地與駕駛機器人進行聯動測試。
綜上所述,本文設計的AEB行人檢測系統可以用于C-NCAP和中國行人測試場景,相較于國外的AEB行人檢測系統,本文設計的測試系統具有如下的優勢:
1) AEB行人檢測系統的控制參數可以靈活調整,滿足國內交通場景的行人檢測測試要求。
2) 整個系統成本較低,可供更多的AEB行人測試和研發單位使用,有助于推進AEB行人檢測系統更新提升。
本文的AEB行人檢測系統也存在一定的不足。比如,假人目標沒有考慮雷達的反射特性;此外,對歐洲新車評估規程(E-NCAP)等國外測試規范沒有很好的適用性。
5 結論
本文設計了一種AEB行人檢測系統,可以根據C-NCAP和AEB行人測試的法規要求,對假人的移動過程進行精準控制,實現了AEB行人檢測系統與駕駛機器人的實時無線通訊。
根據測試實驗結果可知,本文設計的AEB行人檢測系統對假人目標的速度和位移控制精度達到96%,與駕駛機器人的聯動測試一次成功率達到90%,所開發的假人目標具備人體特征及紅外反射特性,能夠用于行人危險工況的測試實驗,其測試精度較高,是汽車AEB系統功能測評和相關產品開發的有效支撐工具。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽科技與產業(2016年3期)2016-05-17 04:32:12
作文大王·低年級(2016年4期)2016-04-18 00:24:37
