混行環境下CACC 系統駕乘舒適性優化控制
2021-12-28 13:03:34王文颯
西南交通大學學報 2021年6期
梁 軍 ,于 揚 ,王文颯 ,陳 龍
(江蘇大學汽車工程研究院,江蘇 鎮江 212013)
隨著車路協同技術的不斷發展,傳統道路交通系統中車輛原本無法顯現的自組織、網絡化、非線性、強耦合等特性逐漸凸顯出來. 交通系統屬性的變化使得傳統研究方法難以適用. 同時,自動駕駛技術的不斷進步一并催生出網聯自動車輛(connected automated vehicle,CAV)與人工駕駛車輛(manual vehicle,MV)長期共存的交通新態勢[1],這種交通組織成分的變化對模型復雜度提出更高要求. 車輛不再有主次之分,所有車輛全部為分散目標,交通系統需被作為開放的復雜系統進行研究. 在CAV 與MV組成的混行交通流新常態下,協同自適應巡航控制(cooperative adaptive cruise control,CACC)作為CAV 的關鍵功能輔助,安全性和穩定性研究取得系列成果,但駕乘舒適性研究明顯不足. 因此,有必要對混行這一新環境下CACC 系統的駕乘舒適性進行新的探索.
CACC 急加速或急減速會引起生理上的不舒適,跟車間距過近或跟車間距誤差過大會造成心理上的不舒適. 對于舒適度的判斷準則大體一致,包括:急動度(加速度變化率)越小越好[2];加速度越小越好[3];對于給定加速度,急動度越小越舒適[4];由車體橫向震動引起的約為0.2 Hz 低頻加速度易誘發暈車[5-7]. 當前,對CAV 駕乘舒適性影響的研究還不全面. Elbanhawi 等[8]總結了CAV 路徑規劃的舒適性,強調了CAV 隊列行駛舒適性的重要性;Milakis 等[9]將駕乘舒適性劃分為CAV 的一級影響. 從宏觀角度來看,駕乘舒適性受加速度、速度波動影響,與交通流穩定性密切相關[10],因速度、加速度波動而偏離穩態后,會產生不舒適感. 因此,CAV 交通流穩定性優化成為提升駕乘舒適性的重要手段,但這方面研究仍存在較大空白[8-11]. 在純CAV 環境下,對跟車模型進行穩定性分析是提升舒適性的常見思路[12-15]. Zhou等[16]提出具有局部穩定性、多準則隊列穩定性的串行分布式模型預測控制(model predictive control,MPC)方法,但不完全適用于混行環境. 鑒于車輛動力學、執行機構的差異,僅從交通流穩定性考慮難以保證單車舒適性最優,還需從微觀角度進行進一步優化[17-18].
因此,本文以CACC 系統的運行舒適性為研究目標,設計考慮駕乘舒適性的雙層控制策略(duallayer control strategy considering ride comfort,RCDCS). 上層控制器從宏觀角度出發,根據MV 行車狀態,以舒適性為優化目標,及時調整車隊整體的跟車間距和速度;下層控制器則從微觀角度出發,根據車隊中不同車輛的動力學情況,利用油門、制動踏板切換策略優化車輛動力輸出,保證每輛車達到最優行車狀態.
1 CACC 系統運行舒適度優化模型
1.1 CACC 系統舒適度優化框架模型
CACC 系統包括車輛控制系統、通信系統和人機交互界面,其系統架構如圖1 所示. 人機交互界面一方面為駕駛員提供跟車基本信息和自車控制信息,另一方面可以控制和調整CACC 系統的運行狀態. 車輛控制系統采用由上層控制器和下層控制器組成的雙層控制結構,上層控制器負責隊列的跟隨控制,協同車輛間的跟車間距、跟車速度,下層控制器負責車輛的加速度控制. 由于系統配備了跟蹤算法[19],因此根據駕駛員設定的跟車時距,融合傳感器獲取的數據,通過無線通信接收前車終端傳輸的速度、加速度信息計算出期望速度和加速度,然后將控制結果反饋至上層目標控制函數,根據當前狀態生成相應加速或者制動命令并傳輸至車輛平臺,從而使車輛按預設的狀態行駛.
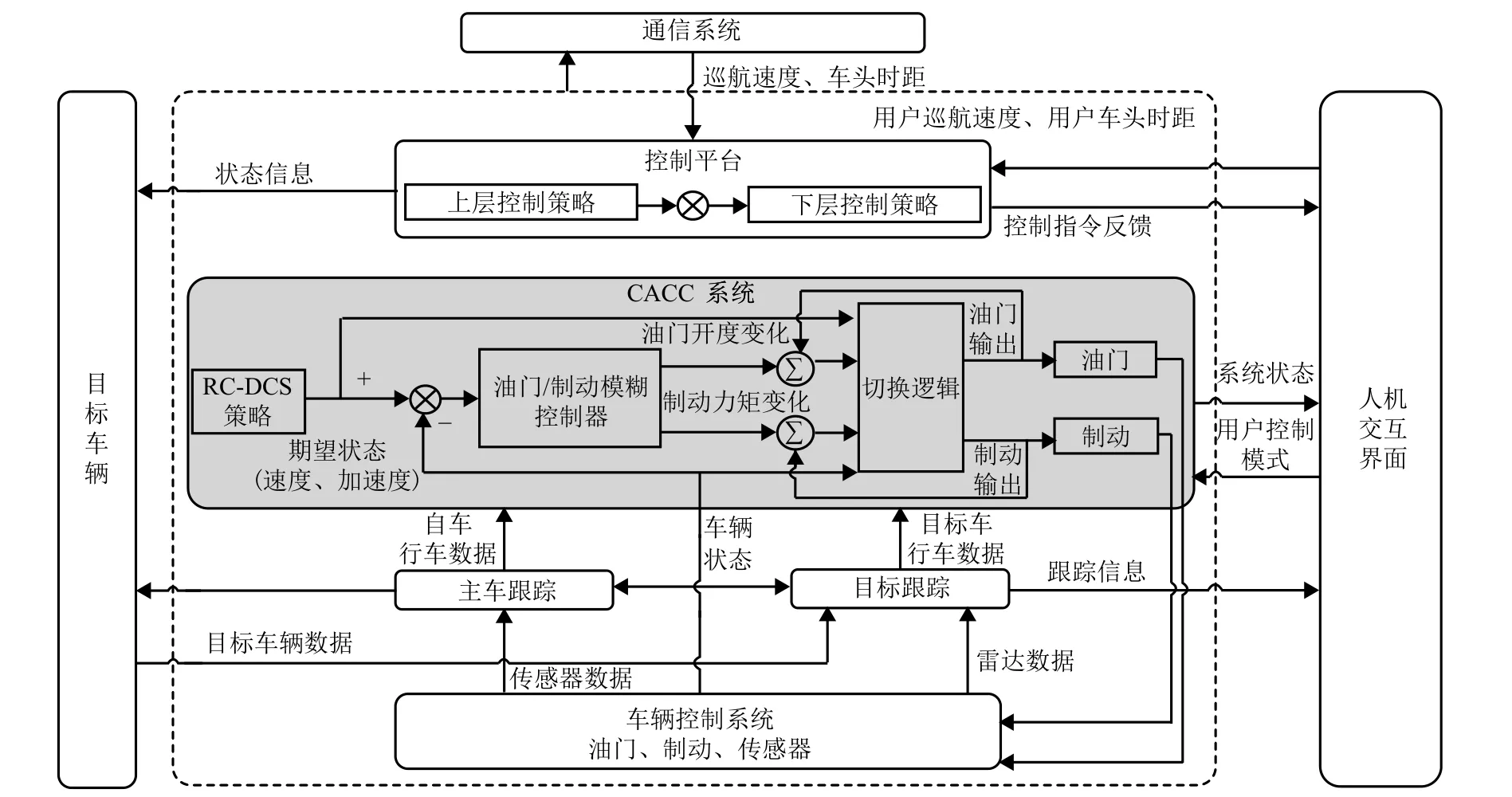
圖1 CACC 系統舒適度優化分層架構Fig. 1 Hierarchical architecture of CACC system
CACC 系統的工作模式如圖2 所示. 當CACC系統啟用時,系統會根據控制策略設定隊列車輛的運行方式,同時上層控制系統會判斷與自車直接通信的車輛身份標識號(identity document,ID)和與測距傳感器檢測到的車輛ID 是否相同. 若檢測到目標變更,控制器會重新獲取新目標信息,根據跟車策略重新計算跟車間距和期望加速度,并交由下層控制器執行,同時對上層結果進行反饋. 當傳輸信號故障時,系統的工作狀態會變為失活,提醒駕駛員進行人工操作.
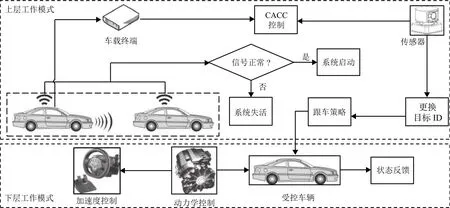
圖2 CACC 系統工作模式Fig. 2 Working mode of CACC system
1.2 RC-DCS 控制策略
1.2.1 上層控制策略設計
首先建立CACC 控制系統的縱向動力學模型,如式(1)~(5)所示.
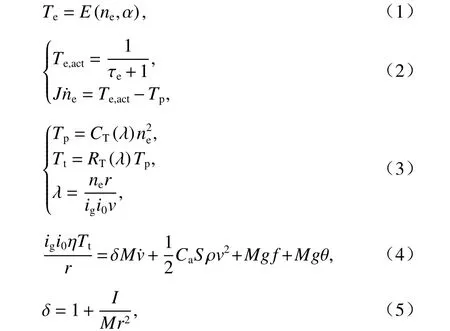
式(1)~(5)中:Te為發動機扭矩;E(?)為發動機靜態特性的非線性函數;ne為發動機轉速;α為油門開度;Te,act為發動機實際扭矩;τe為發動機時間常數;J為飛輪慣性;Tp為液力變矩器的泵扭矩;CT(?)為變矩器的容量系數;λ為變矩器的轉速比;Tt為變矩器的渦輪扭矩[20];RT(?)為變矩器的扭矩比;ig為變速箱傳動比;i0為終傳動比;r為車輪半徑;v為后車車速;η為傳動系統效率;M為車輛質量;g為重力加速度;Ca為空氣阻力系數;S為前橫截面積;ρ為空氣密度;f為滾動阻力系數;θ為道路坡度;δ為集中系數;I為四車輪慣性矩.
上層控制器采用由與領航車相對速度和跟車間距誤差表征的車輛縱向動力學和車輛間縱向動力學的兩狀態空間模型,可由式(6)、(7)計算求得.


式(6)~(8)中:vrel為領航車與后車相對速度;vp為領航車速度;de為跟車間距誤差;d為實際跟車間距;ddes為期望跟車間距;doff為補償距離[21-22],根據經驗取值為1.5 m;h為可變車頭時距;h0為標稱車頭時距,取值2.5;cv、kv為大于0 的常數.

顯然,控制策略是線性反饋,可以實現將車輛動力學線性化,并通過車輛動力學排除一些特征參數簡化系統模型.
行駛過程中,考慮第i輛車與前車的通信時延,得到式(14)所示的CACC 系統狀態空間方程.
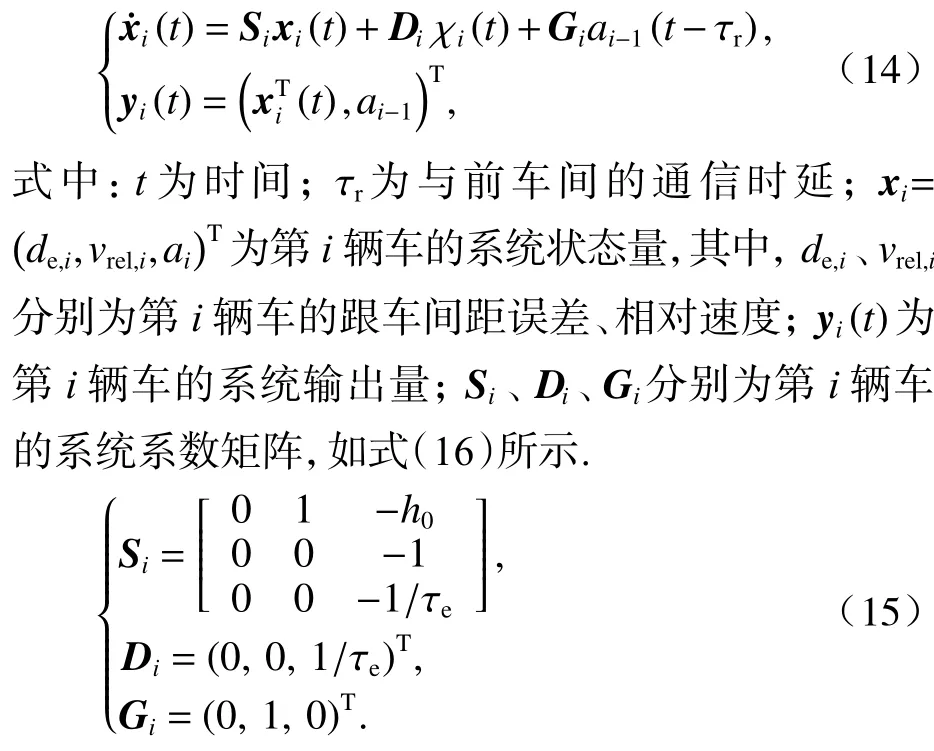
對于跟隨車輛,在保證盡可能小的速度誤差和距離誤差的前提下,定義了代價函數L來優化行駛的穩定性和舒適性,如式(16)所示.
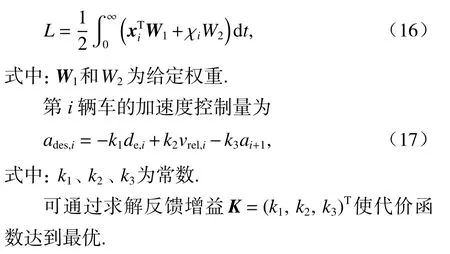
當自車行駛速度小于巡航速度時,W1= (0.01,1.00, 0.10)T,W2= 8,K= (0.03, 0.39, ?0.22)T;行駛速度等于巡航速度時,W1= (0.40, 1.00, 0.10)T,W2= 1,K=(0.63, 0.96, ?0.43)T;行駛速度大于巡航速度時,W1=(0.60, 1.00, 0.15)T,W2= 2,K= (0.93, 1.20, ?0.68)T.
1.2.2 下層控制策略設計
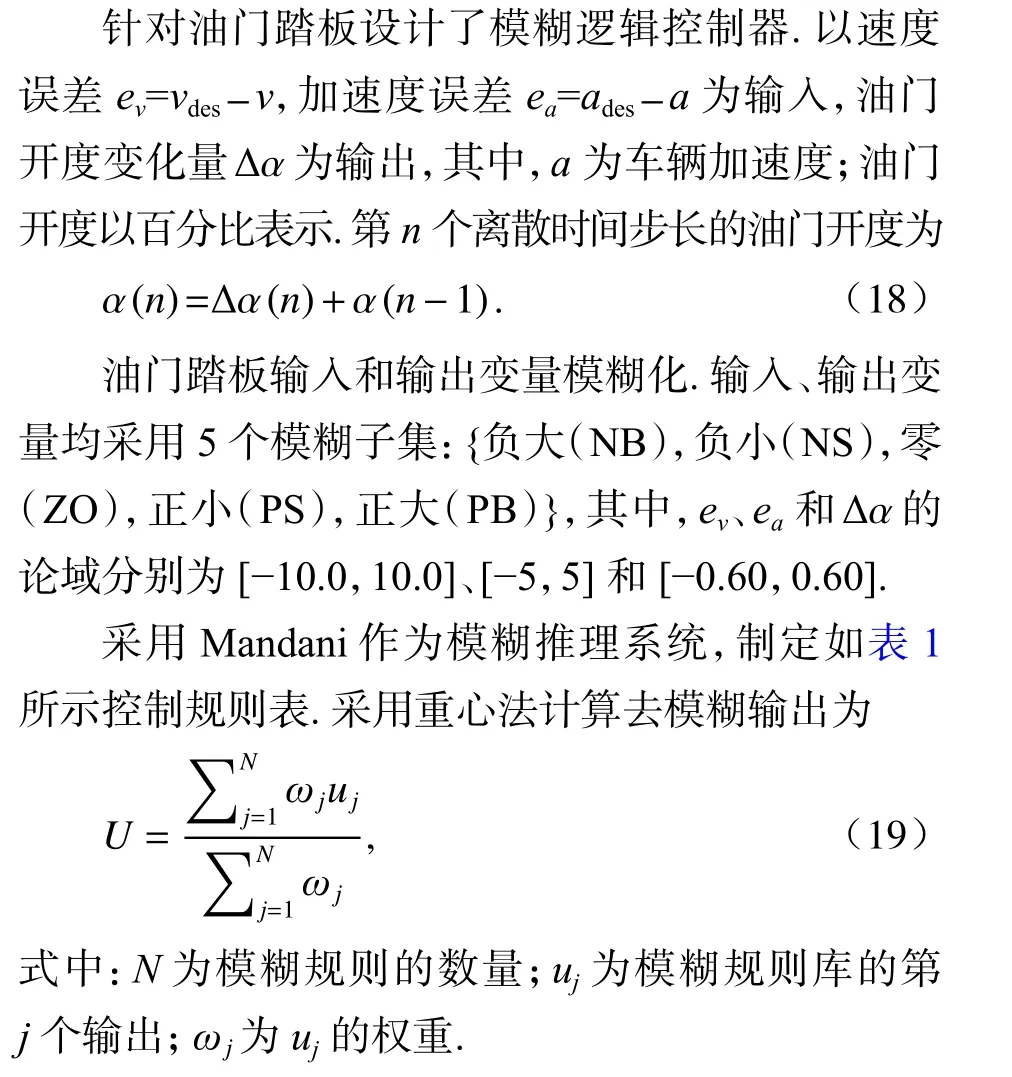
在混行環境中,當CACC 車輛跟隨MV 時,僅依靠上層跟車模型無法很好滿足乘坐舒適性,分析發現車輛起步時存在振幅過大、波動頻率過高的問題,為此設計基于模糊理論的下層控制器優化加速度輸出,利用模糊理論優化油門、制動踏板切換邏輯,保證CACC 車輛退化為ACC 車輛后的舒適性.
根據駕駛規則,制動踏板基本操作邏輯與油門踏板相反,因此其模糊控制器與油門踏板相同. 唯一區別是制動控制器輸出制動力矩變化量與油門控制器的輸出相反,如式(20)所示,則當前制動力矩百分比如式(21)所示.

式中:b(n)、Δb(n)分別為在第n個離散時間步長的制動百分比、制動百分比變化量.
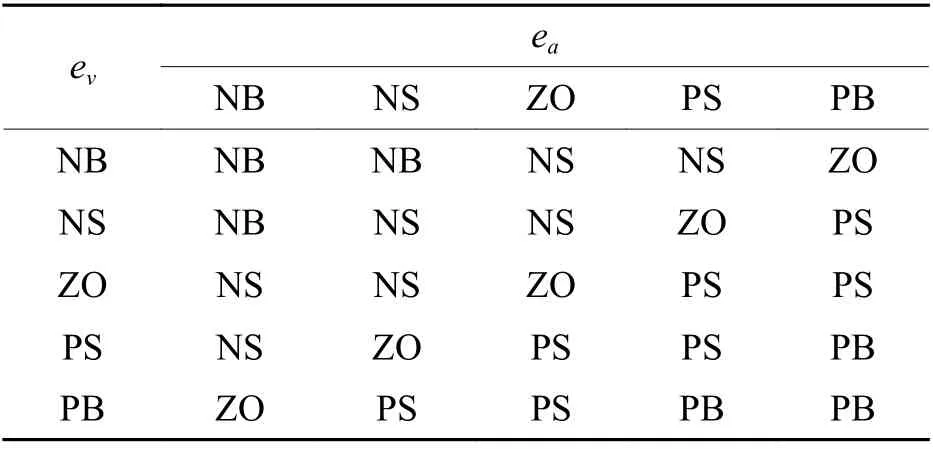
表1 控制規則表Tab. 1 Control rules
由于油門開度和制動力矩是兩個物理意義、標度不同的變量[23],通過百分比表示可以將兩個輸出值統一到 [0,1],從而將制動控制器與油門控制器簡化為一個控制器.
為保證油門和制動控制器協調工作,設計切換控制器如下:1) 避免兩踏板同時工作;2) 踩下油門踏板前需抬起制動踏板,反之亦然;3) 避免頻繁切換油門和制動. 因此,采集車輛速度誤差、當前油門和制動狀態、油門和制動的輸入等信息,由切換控制器決策兩者輸出. 如表2 所示,以ev的取值范圍為判斷標準將輸出方案分為減速區域、保持區域、加速區域. 當前狀態分為油門激活(throttle activation,TA)、制動激活(brake activation,BA)、油門和制動均為未激活(not activation,NA),輸出方案分為油門控制(throttle control,TC)、制動控制(brake control,BC)、無操作(not operation,NO).
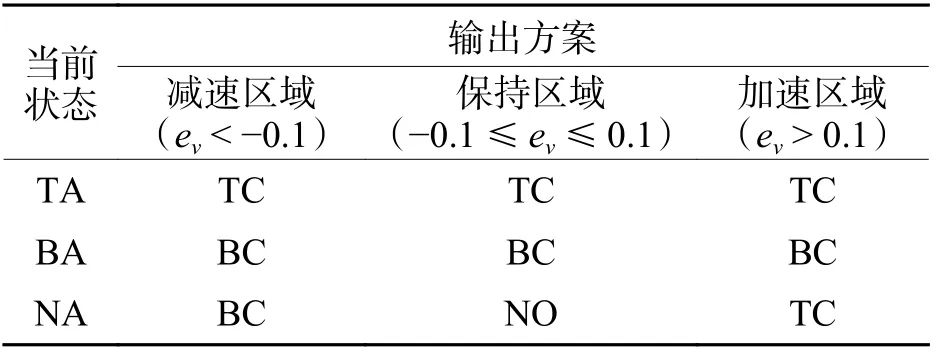
表2 切換控制策略Tab. 2 Switching control strategies
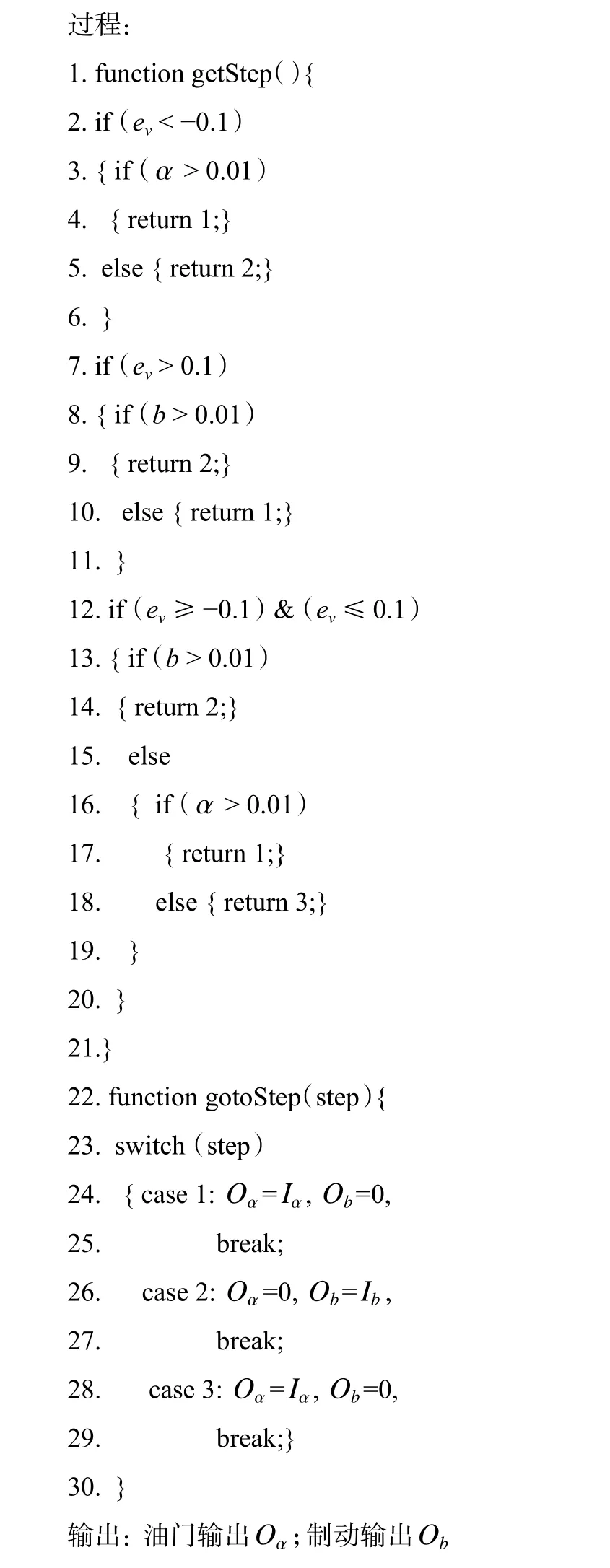
保持區域作用是為避免控制器在油門和制動踏板之間頻繁切換,其輸出方案始終保持當前狀態.以0.01 作為判斷當前油門或制動踏板狀態的閾值,若油門開度值大于0.01,則油門激活;若兩者均未大于0.01,則當前狀態為無操作. 切換邏輯偽代碼如下.
輸入:速度誤差ev;油門開度 α ;制動力矩百分比b;油門輸入Iα;制動輸入Ib
2 試驗驗證
2.1 試驗說明
以MPC 策略[16]為對比試驗,在保證MPC 策略和RC-DCS 控制策略均處于最佳工作狀態下,設計CACC 系統駕乘舒適性優化控制試驗. 試驗采用PreScan 和MATLAB/Simulink 聯合仿真,建立由搭載CACC 系統車輛組成的車隊,車輛間借助V2X傳感器實現專用短程通信(dedicated short range communication,DSRC)功能獲取周圍車輛行車信息,利用技術自主傳感器(technology independent sensor,TIS)模擬激光雷達獲取前車距離、相對車速、方位角,若前方車輛為MV,后車退化為ACC 車輛,通過激光雷達進行巡航控制. 為保證控制策略在直道和彎道的適用性,后車跟隨MV 時根據自身橫擺角速度判斷是否行駛在彎道路段,融合長距和短距雷達獲取的前車數據,以達到穩定跟蹤MV 的目的.
2.2 試驗結果及分析
圖3 為跟隨MV 工況下5 輛CACC 車輛跟車間距誤差、速度、加速度對比曲線. 圖(a)、(d)中:1—2 號車表示第1 輛車和第2 輛車間的跟車間距,其余類推.
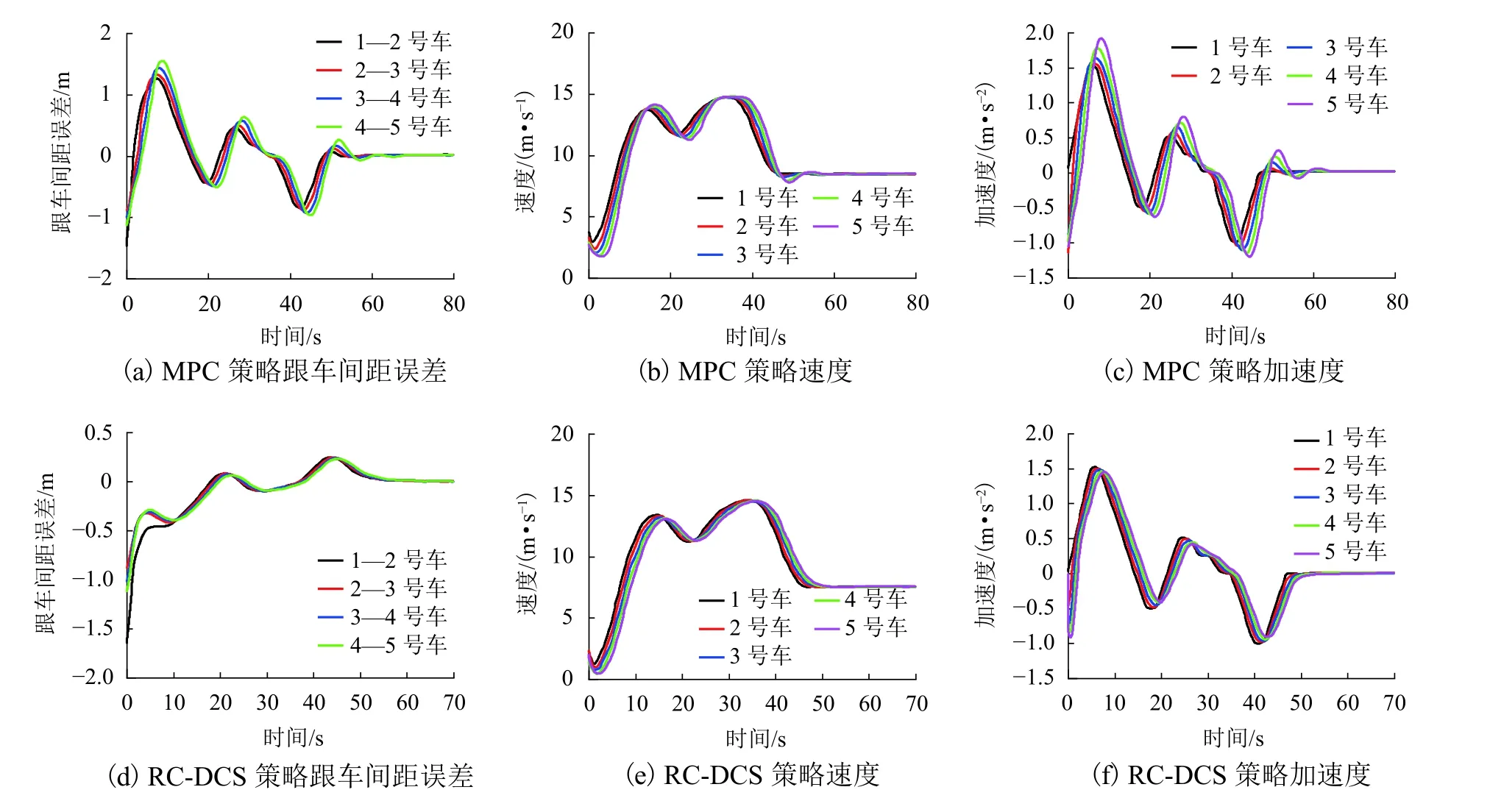
圖3 車隊整體運行結果對比Fig. 3 Result comparison of fleet overall operation
由圖3 可知:MPC 策略最大跟車間距誤差1.56 m、最大加速度1.93 m/s2;相同工況下,RC-DCS 策略最大跟車間距誤差0.43 m、最大加速度1.45 m/s2,實現CACC 系統精準跟車控制. 相較于MPC 策略,RC-DCS 跟車間距誤差、最大加速度分別降低72.44%、24.87%,且曲線波動幅度更小. 可見,RC-DCS 參數波動較小,在CACC 車隊的總體運行效率更佳,具有更為穩定、舒適的駕乘體驗.
為進一步驗證RC-DCS 策略在MV 插入CACC車隊工況的整體行駛效果,設計包含10 輛CACC車輛的車隊,MV 在50 s 時從3 號車后方切入,試驗結果如圖4 所示.
由圖4(a)看出:相較于MPC 策略,由于RCDCS 策略采用可變車頭時距,MV 切入CACC 車隊后,為保證行車舒適性,車隊跟車時距由1.2 s 調整為1.6 s,因此車輛的速度波動均有一定程度減小.相應地,由圖4(b)看出,相較于MPC 策略,RC-DCS控制下的加速度曲線更加平穩,說明該策略可有效降低因MV 介入導致的車隊加速度波動,顯著提升CACC 車隊的駕乘舒適性.
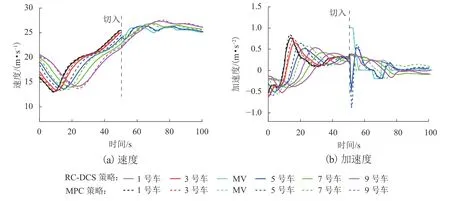
圖4 MV 切入結果對比Fig. 4 Result comparison of MV cut-in
為驗證下層控制策略在單車跟車穩定性、駕乘舒適性的效率,選取跟隨、緊急制動、MV 由旁車道切入本車道3 個典型工況,結果如圖5 所示.
由圖5(a)可知:在跟隨工況下,相較于MPC 策略,RC-DCS 響應更及時,曲線振幅有一定程度減小,標準差降低9.6%,偏度降低26.5%. 可見,RCDCS 可有效改善加速度突變,提高跟隨過程中乘車舒適性.
由圖5(b)可知:在制動工況下,相較于MPC 策略,RC-DCS 過濾掉加速度的較小波動,標準差降低10.4%. 說明RC-DCS 在制動過程中的表現更加平穩.
由圖5(c)可知:在切入工況下,相較于MPC 策略,RC-DCS 對速度變化響應更加及時,加速時調整時間點更早,調整時長約減少2 s. RC-DCS 最大加速度0.34 m/s2,MPC 策略最大加速度0.82 m/s2,其加速度標準差降低2.9%. 說明RC-DCS 具有更好的安全性、舒適性.
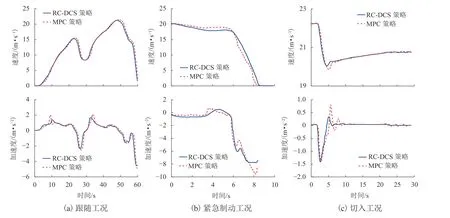
圖5 典型工況下單車試驗結果對比Fig. 5 Result comparison of single vehicle experiments under typical working conditions
3 結 論
本文以CACC 車輛在混行環境下的駕乘舒適性優化為目的,構建適用于CACC 系統的雙層控制策略. 主要工作有:
1) 設計采用兩狀態空間的上層控制策略,定義代價函數從宏觀優化車隊的整體穩定性和舒適性;設計采用油門和制動踏板切換邏輯控制器的下層控制策略,從微觀優化單車的加速度輸出穩定性.
2) 結合仿真試驗對提出的RC-DCS 進行驗證,結果表明所提策略可有效改善CACC 車隊跟車間距波動及加速度波動,且在跟車、緊急制動和切入3 種典型工況下對加速度控制效果明顯優于MPC,有效提升駕乘舒適性能.
綜上,RC-DCS 可滿足仿真場景下駕乘舒適性要求,但受試驗條件所限,尚未驗證在實車平臺的運行效果,后續計劃將在實車上進一步開展調試、驗證工作,以期提高本策略的實用性.
致謝:揚州市寶應縣重點研發計劃(BY201908).
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測繪(2020年12期)2020-12-29 01:33:58
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
建筑熱能通風空調(2018年5期)2018-07-09 03:16:38
池州學院學報(2017年3期)2017-10-16 01:38:35
家庭影院技術(2017年9期)2017-09-26 03:41:45
通信電源技術(2016年1期)2016-04-16 04:57:26