基于激光雷達(dá)的無人駕駛障礙物檢測和跟蹤
2021-12-28 13:03:44曾文浩
西南交通大學(xué)學(xué)報 2021年6期
關(guān)鍵詞:關(guān)聯(lián)檢測
王 濤 ,曾文浩 ,于 琪
(西南交通大學(xué)電氣工程學(xué)院,四川 成都 610031)
近些年,隨著人工智能和機器人技術(shù)的不斷發(fā)展,無人駕駛汽車作為人工智能領(lǐng)域的一個重要的分支已經(jīng)成為國內(nèi)外的研究熱點. 無人駕駛汽車主要通過激光雷達(dá)、相機、毫米波雷達(dá)、IMU (inertial measurement unit) 等傳感器實現(xiàn)對周圍環(huán)境的感知.障礙物檢測和跟蹤是環(huán)境感知的重要環(huán)節(jié),檢測和跟蹤的效果好壞直接影響無人車的安全行駛. 近些年基于相機圖像的檢測技術(shù)獲得了很大發(fā)展,但是其檢測效果易受光線等環(huán)境影響. 激光雷達(dá)則因其能夠獲得障礙物的基本形貌、距離和位置等信息,同時具有精度高等優(yōu)點,被廣泛運用于無人駕駛的障礙物檢測和跟蹤中[1].
國內(nèi)外學(xué)者對障礙物檢測和跟蹤的做了大量研究. 文獻(xiàn)[2]基于八叉樹網(wǎng)格法檢測運動物體,然后用DBSCAN (density-based spatial clustering of applications with noise)算法聚類. 然而其網(wǎng)格繪制過程復(fù)雜、難度大;文獻(xiàn)[3]用選取4 個代表點取代對所有點的搜索去改進DBSCAN,實現(xiàn)激光雷達(dá)目標(biāo)物的快速、準(zhǔn)確檢測,但是其代表點的選取方法可能選入之前訪問過的點從而降低效率. 文獻(xiàn)[4]通過引入?yún)^(qū)域步長參數(shù)的方式,將激光點云數(shù)據(jù)距離測量值與搜索半徑建立了關(guān)聯(lián). 這樣在距離增大時,搜索半徑也隨之增大,適應(yīng)了激光雷達(dá)數(shù)據(jù)在距離增大時測量點密度降低的變化趨勢,使得算法對于區(qū)域密度分布不均勻的數(shù)據(jù)具備更好的普適性,在單線激光雷達(dá)中效果優(yōu)于傳統(tǒng)DBSCAN. 文獻(xiàn)[5]和文獻(xiàn)[6]采用自適應(yīng)的最小聚類數(shù)量MinPts 適應(yīng)遠(yuǎn)近聚類的物體點云,水平和垂直方向采用不同搜索半徑適應(yīng)激光雷達(dá)點云分布,但是該方法的搜索半徑都沒有隨距離調(diào)整,當(dāng)物體足夠遠(yuǎn)時候選點的鄰域點可能不存在,導(dǎo)致聚類失敗. 文獻(xiàn)[7]對聚類后的障礙物采用最近鄰數(shù)據(jù)關(guān)聯(lián)算法對距離特征進行前后幀關(guān)聯(lián),再使用卡爾曼濾波器進行運動狀態(tài)估計和速度估計,但是用單一特征對障礙物進行關(guān)聯(lián),容易造成漏跟和錯跟;文獻(xiàn)[8]認(rèn)為如果前后幀兩個對象的邊界框重疊,則被認(rèn)為是同一個對象,然而該方法只適用于緩慢移動的物體,一旦速度過快就會關(guān)聯(lián)失敗. 汪世財?shù)萚9]考慮了障礙物的點云位置特征和幾何特征,利用多特征提高了障礙物關(guān)聯(lián)的可靠性,但是特征權(quán)重值通過經(jīng)驗獲得的固定值,無法隨著位置不斷調(diào)整.
本文可分為障礙物檢測和跟蹤兩個部分,其中障礙物檢測分為點云預(yù)處理和聚類兩個部分. 在點云預(yù)處理部分主要是道路邊緣檢測和地面點去除等預(yù)處理工作;在聚類部分,本文對傳統(tǒng)的DBSCAN進行改進,采用自適應(yīng)搜索參數(shù)和代表候選點法,分別提高聚類適用性和實時性. 在障礙物跟蹤部分,本文利用加權(quán)的最小二乘法進行速度估計,然后采用一種自適應(yīng)權(quán)重的多特征關(guān)聯(lián)算法進行多目標(biāo)關(guān)聯(lián).
最后在實驗中,采用16 線激光雷達(dá)進行障礙物檢測和跟蹤,驗證了本文障礙物聚類和關(guān)聯(lián)算法的有效性. 通過實驗表明整個檢測流程能夠?qū)?0 幀/s的激光雷達(dá)數(shù)據(jù)實現(xiàn)準(zhǔn)確、穩(wěn)定地檢測和跟蹤.
1 點云預(yù)處理
本文使用的激光雷達(dá)點云數(shù)據(jù)來源于兩臺型號為Velodyne VLP-16 的激光雷達(dá),這兩臺激光雷達(dá)被安裝在“智軌”列車的左右兩側(cè),“智軌”列車為中車株洲電力機車研究所有限公司自主研發(fā)的智能軌道快運列車. 本文數(shù)據(jù)處理硬件平臺為個人電腦,硬件配置為Intel 8 核2.3 GHz 處理器,內(nèi)存8 GB,軟件采用Ubuntu16.04 下的ROS 機器人操作系統(tǒng). 圖1 所示為“智軌”列車平臺和數(shù)據(jù)采集場所——某市的株洲大道.

圖1 “智軌”列車平臺以及株洲大道Fig. 1 ART Train Platform and Zhuzhou Avenue
1.1 路沿檢測和感興趣區(qū)域提取
VLP-16 的豎直視場角為30°,豎直方向有16 線激光束,水平視場角為360°. 工作頻率為10 Hz 時,一臺激光雷達(dá)每一幀大約有3 萬個點. 兩臺激光雷達(dá)的數(shù)據(jù)量是單臺的兩倍,因此有必要減少無關(guān)點云對數(shù)據(jù)處理速度的影響.
激光雷達(dá)回傳的點云數(shù)據(jù)中包含許多與行駛區(qū)域無關(guān)的點,提取出可行駛區(qū)域,可以減少數(shù)據(jù)量,提高計算速度. 首先進行道路邊沿檢測[10]. 根據(jù)激光雷達(dá)點云在路緣石處存在高程突變的特點,提取出每一線的激光點云;然后按坐標(biāo)y的絕對值對左右雷達(dá)點云分別排序(激光雷達(dá)坐標(biāo)系符合空間坐標(biāo)系的右手法則);利用“滑動窗口”對坐標(biāo)z的值突變較大的“窗口”進行標(biāo)記,將其“窗口”內(nèi)突變最大的點作為路沿點. 提取效果如圖2 所示,圖中紅色大點即為路沿點. 然后選取路沿中間的區(qū)域和路沿附近的區(qū)域作為感興趣區(qū)域,其余區(qū)域不參與之后的處理,從而減少計算量.

圖2 路沿點提取效果Fig. 2 Effect of curb point extraction
1.2 地面分割
感興趣區(qū)域內(nèi)的點云數(shù)據(jù)中不僅包含障礙物的點,還包含大量的地面點,障礙物檢測關(guān)心的是地面以上的點,因此需要去除地面點. 由于現(xiàn)實的地面并不是一個完美的平面,而且當(dāng)距離較大時激光雷達(dá)會存在一定的測量噪聲,單一的平面模型并不足以描述現(xiàn)實的地面. 本文使用基于掃描線束的分割算法[11]對地面進行分割,該算法的核心是以射線的形式來組織點云. 將點云的 (x,y,z) 三維空間降到 (x,y) 平面來看,計算每一個點的水平夾角θ,對同一水平夾角的點按照水平距離r進行排序,計算前后兩點的坡度Δp是否大于事先設(shè)定的坡度閾值,從而判斷點是否為地面點,計算如式(1).
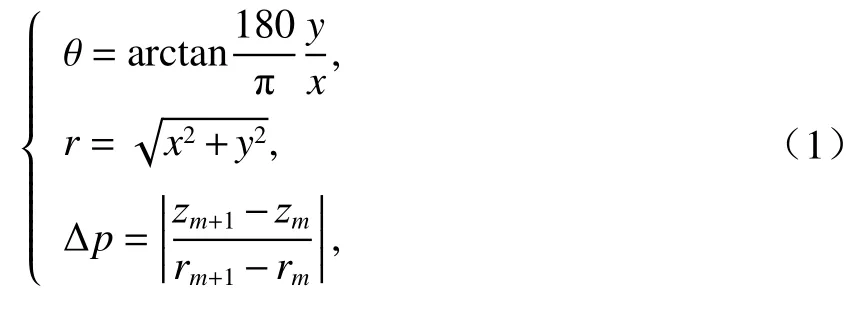
式中:m為測量點序號;zm和rm分別為點m的z方向距離和水平距離.
分割效果如圖3 所示,圖3(a)為原始點云,包括地面和障礙物點云,圖3(b)為地面分割算法得到的障礙物點云. 由圖3 可見,通過以上方法,成功達(dá)到了減少點云數(shù)據(jù)數(shù)量并保留障礙物點云的效果.

圖3 地面分割效果Fig. 3 Effect of ground segmentation
2 優(yōu)化的DBSCAN 聚類檢測算法
本文采用自適應(yīng)的聚類算法進行障礙物檢測,并提取障礙物的幾何特征特征. DBSCAN 是經(jīng)典的密度聚類算法,該方法將具有足夠高密度的區(qū)域劃分為簇,可發(fā)現(xiàn)任意形狀的聚類. DBSCAN 算法需要兩個參數(shù):搜索半徑ε和最小包含點數(shù)MinPts.DBSCAN 算法的思想是在數(shù)據(jù)集中任選一點q作為起始點,如果q的ε鄰域內(nèi)的點數(shù)量不小于MinPts,則q的鄰域點作為即候選點,通過不斷查找從候選點的鄰域點來擴展該簇,直至找到1 個完整的簇;如果q的ε鄰域內(nèi)的點數(shù)量小于MinPts,則q被暫時標(biāo)注為噪聲點. 對數(shù)據(jù)集中未被處理的點重復(fù)上述過程,進行其他簇的擴展,直至所有點均被訪問.
2.1 自適應(yīng)參數(shù)的改進
全局固定ε閾值會導(dǎo)致分割程度的不確定性,閾值設(shè)置過大會導(dǎo)致距離較近的兩類物體被分為一類,閾值過小會導(dǎo)致本應(yīng)該屬于同一個物體的點云被分開,這就造成了存在分割不足或者分割過當(dāng)?shù)那闆r[12]. 因此ε的取值應(yīng)該隨點云分布而變化,本文采用隨距離增大而線性增大的ε值.
由于激光雷達(dá)在水平方向的分辨率與豎直方向的分辨率一般不同,所以某些情況下兩個距離很近的物體,無論用較大的ε還是較小的ε都無法有效分割,因此ε的選擇不僅需要隨著離激光雷達(dá)原點距離變化,還要在不同方向上取不同的值,最終形成一個空間中大小不斷變化的“搜索橢球”,如圖4所示.
圖4 中:L和H分別為兩個相鄰點之間的水平和豎直距離;εh和εv分別為水平和豎直搜索半徑,即“搜索橢球”的半短軸和半長軸.

圖4 球型搜索和橢球型搜索示意Fig. 4 Illustration of spherical search and ellipsoid search
可以使用式(2)計算兩個相鄰點之間的L和H.

式中:d為測量點到激光雷達(dá)原點的距離;θh和θv分別為激光雷達(dá)的水平和垂直角分辨率. 查閱VLP-16 用戶手冊可知,激光雷達(dá)在10 Hz 的工作頻率下其水平和垂直角分辨率分別為0.2° 和2.0°.
為了確保可以搜索到同一物體表面的相鄰點,搜索半徑應(yīng)大于或等于該位置的兩個相鄰點之間的距離. 所以水平和豎直搜索半徑εh和εv可表示為

式中:a為搜索系數(shù),代表著搜索半徑跨越的激光束的數(shù)量,a≥ 1.
MinPts 值是根據(jù)從搜索橢球內(nèi)收集的最大點數(shù)以及障礙物傾斜角度來估算的. 當(dāng)激光束垂直照射到障礙物時,障礙物點數(shù)達(dá)到最大值,此時可以將橢球體視為橢圓形. 直接計算橢圓內(nèi)的點數(shù)很困難,因此可以利用蒙特卡洛隨機模擬法的思想求解橢圓內(nèi)點數(shù). 即首先計算長為εv、寬為εh的矩形內(nèi)的點數(shù)量Nr,再根據(jù)矩形和橢圓的面積比,計算出橢圓內(nèi)點的數(shù)量為

考慮到實際情況下激光束與障礙物平面之間的角度可能不為90°,障礙物的總點數(shù)等于或小于計算的N值. 假設(shè)原本激光束與障礙物平面夾角為90°,而現(xiàn)在發(fā)生水平方向偏轉(zhuǎn)角度φh,如圖5 所示.O為激光雷達(dá)原點,E為相鄰點連線的與相鄰激光束角平分線交點,原來相鄰點A、B之間的水平距離為L(AB長度),旋轉(zhuǎn)φh度后為點C、D,距離變成L1(CE長度)+L2(DE長度).

圖5 物體發(fā)生傾斜時的示意Fig. 5 Schematic diagram in the case of tilted object
此時兩個相鄰點之間的豎直距離不會發(fā)生變化,而水平距離會發(fā)生變化. 計算方法如式(5).

經(jīng)化簡可計算出偏轉(zhuǎn)后相鄰點之間的水平距離Lr(CD長度) 為

定義水平偏轉(zhuǎn)系數(shù)kh,當(dāng)水平偏轉(zhuǎn)φh時相鄰點之間的水平距離增加kh倍,則kh可以表示為

實際過程中水平角分辨率θh很小,可當(dāng)作趨近于0;而若φh趨近于90° 時,該面將無法接收點云.因此:

同理可以得到豎直偏轉(zhuǎn)系數(shù)kv,kv≈1/cosφv,φv為垂直偏轉(zhuǎn)角. 因此,結(jié)合式(4)、(5)、(7)和式(8)可得,物體與激光數(shù)發(fā)生偏轉(zhuǎn)后橢圓內(nèi)的點數(shù)量為

考慮實際情況,水平方向偏轉(zhuǎn)角度φh最大取60°且豎直方向偏轉(zhuǎn)角度φv最大取45°. 另外由于空氣中雨霧、塵埃和鏡面反射等原因會造成的點云空缺和偏移,所以引入損失系數(shù)η,取值0.8. 則最后MinPts 取值為

按照以上方法選擇自適應(yīng)搜索半徑ε和最小包含點數(shù)MMinPts,可以對不同距離和傾角的障礙物3 維點云進行準(zhǔn)確聚類.
2.2 實時性優(yōu)化
原始的聚類算法中,核心點的鄰域內(nèi)所有的點都會作為候選點,而實際起作用的點主要是鄰域邊緣的數(shù)據(jù)點,選取全部鄰域點必定會浪費較多的搜索時間. 為了加速DBSCAN 算法,文本選取核心點鄰域內(nèi)某些具有代表性的點作為候選種子點,簡稱代表點. 如圖6 所示,P為核心點,三角形和圓形點是P的鄰域點. 在未被訪問過的領(lǐng)域核心點中選出離6 個邊緣點(εh,0,0)、(?εh,0,0)、(0,εh,0)、(0,?εh,0)、(0,0,εv)和(0,0,?εv)距離最近的點作為代表點,添加入該種子簇,如圖6 中三角形. 若某個代表點被選擇兩次,則它只被添加一次. 采用這種方法,在激光雷達(dá)點云數(shù)據(jù)中,任意核心點最多6 個代表點. 因此可以有效減少計算量,提高聚類速度.

圖6 橢球域及其代表對象的三維鄰域Fig. 6 Three-dimensional neighborhood of ellipsoidal domain and its representative objects
本文采用的激光雷達(dá)是低線束激光雷達(dá),如果使用64 線、128 線等激光雷達(dá)時,因為數(shù)據(jù)量過于大,該算法內(nèi)存消耗較大,會出現(xiàn)延遲. 此時可以考慮對點云進行柵格化處理,然后對有序的柵格進行聚類,以提高算法實時性.
3 障礙物跟蹤
為了獲取動態(tài)障礙物的動態(tài)特性,需要將當(dāng)前幀信息與歷史信息進行匹配[13]. 本文利用加權(quán)的多特征數(shù)據(jù)關(guān)聯(lián)算法結(jié)合濾波算法實現(xiàn)對動態(tài)障礙物的跟蹤. 激光雷達(dá)點云前后幀間隔0.1 s,每幀之間可以認(rèn)為是線性運動,而卡爾曼濾波器是一個線性遞歸濾波器,相比于粒子濾波也具有更高的實時性.因此本文先采用卡爾曼濾波器對目標(biāo)障礙物的位置進行預(yù)測后,再用多特征數(shù)據(jù)關(guān)聯(lián)算法在前后相鄰兩幀之間進行關(guān)聯(lián),最后采用卡爾曼濾波器對目標(biāo)障礙物的位置進行濾波,經(jīng)過以上步驟即可完成對目標(biāo)跟蹤. 算法流程如圖7 所示.

圖7 障礙物跟蹤算法流程Fig. 7 Flowchart of obstacle tracking algorithm
3.1 濾波器預(yù)測
受測量噪聲和自主駕駛車輛車體自身運動的影響,直接對前后幀的障礙物進行關(guān)聯(lián),有可能導(dǎo)致關(guān)聯(lián)錯誤. 為了解決目標(biāo)跟蹤中測量噪聲引起的目標(biāo)運動軌跡的大幅變動對預(yù)測目標(biāo)運動軌跡造成的影響,以及在障礙物關(guān)聯(lián)中對于預(yù)測目標(biāo)下一幀位置的需要,有必要采用卡爾曼濾波器對目標(biāo)的位置進行預(yù)測.
卡爾曼濾波的預(yù)測方程如式(11).

式中:Xt為第t幀(即時刻t)障礙物中心的狀態(tài)向量,


本文激光雷達(dá)工作頻率為10 Hz,所以每幀時間間隔T取0.1 s;
ωt為狀態(tài)噪聲,滿足ωt~N(0,Q)的高斯分布,本文取Q= 0.01E4,E4為4 階單位矩陣.
則障礙物中心的狀態(tài)向量預(yù)測值和預(yù)測協(xié)方差方程分別為

式中:Xt|t和Pt|t分別為時刻t的預(yù)測值向量和預(yù)測協(xié)方差向量.

令S(a0,a1,a2)取最小值,即可得到系數(shù)a0、a1、a2,擬合后可求出時刻t的速度值.
當(dāng)障礙物出現(xiàn)次數(shù)為1,即新出現(xiàn)時,認(rèn)為速度為0;當(dāng)障礙物出現(xiàn)次數(shù)為2,即前面只有1 幀時,速度即為前一幀的速度;當(dāng)障礙物出現(xiàn)次數(shù)為3、4、5 時,進行1 次函數(shù)擬合;當(dāng)障礙物出現(xiàn)次數(shù)大于5,即前面的5 幀以上時,則利用前面的5 幀數(shù)據(jù)進行上述二次曲線擬合計算當(dāng)前時刻的速度.
3.2 多特征數(shù)據(jù)關(guān)聯(lián)
逐幀動態(tài)跟蹤目標(biāo)屬于動態(tài)規(guī)劃領(lǐng)域中的“配對問題”[14],兩組點可基于距離進行配對. 本文采用最近鄰算法進行數(shù)據(jù)關(guān)聯(lián),最近鄰算法計算所有觀測數(shù)據(jù)和目標(biāo)預(yù)測值之間的差異度,然后再取差異度最小的一個觀測數(shù)據(jù)作為該目標(biāo)的觀測值.
設(shè)第t幀內(nèi)檢測到的第i個障礙物與第t+1 幀內(nèi)檢測到的第j個障礙物之間的差異度函數(shù)通常采用歐式距離計算, 如式 (16).

式中:n為障礙物數(shù);Δck為第t幀檢測到的第i個障礙物與第t+1 幀檢測到的第j個障礙物之間第k個特征的差值.
由于16 線激光雷達(dá)垂直方向分辨率低,運動的障礙物的點云在垂直方向會有很大突變,所以本文不使用垂直方向特征. 根據(jù)激光雷達(dá)的掃描特性,物體位于激光雷達(dá)不同位置會被掃描到不同形態(tài)的點云,例如物體位于激光雷達(dá)正前后方,則點云主要是yOz面點云,如圖8 的物體A,其長度特性消失;物體位于激光雷達(dá)側(cè)方,則點云主要是xOz面點云,如圖8 的物體B,其寬度特性消失;物體位于激光雷達(dá)其他位置,則點云由xOz和yOz面按組成點云,圖8的物體C,同時擁有寬度和長度特性.

圖8 障礙物與激光雷達(dá)的相對位置Fig. 8 Relative position of obstacles and LiDAR
假設(shè)圖中x方向為長度方向,y方向為寬度方向. 越靠近x軸障礙物的點云的寬度特征越明顯;越靠近y軸障礙物的點云的長度特征越明顯. 因此障礙物長和寬特征的權(quán)值可以根據(jù)障礙物相對激光雷達(dá)的水平位置而調(diào)節(jié).
當(dāng)收到第t+1 幀障礙物觀測點云時,計算其與第t幀障礙物預(yù)測狀態(tài)的加權(quán)歐式距離,然后將差異度最小的點進行關(guān)聯(lián). 則第t幀的第i個障礙物和第t+1 幀的第j個障礙物差異度計算如式(17).

最近鄰數(shù)據(jù)關(guān)聯(lián)算法計算量小,適用于目標(biāo)數(shù)量較少時的前后匹配. 但在目標(biāo)數(shù)目較多、運動情況復(fù)雜時,可以考慮歷史信息或者概率信息,比如采用JPDA (joint probabilistic data association) 或者MHT (multiple hypothesis tracking) 算法,提高對多目標(biāo)復(fù)雜場景的抗干擾能力.
3.3 濾波器更新
當(dāng)前一幀預(yù)測后的狀態(tài)與下一幀觀測狀態(tài)關(guān)聯(lián)上之后,需要利用下一幀的觀測值對上一幀的預(yù)測值進行修正,得到下一幀狀態(tài)作為最優(yōu)估計,即卡爾曼濾波的更新過程.
測量狀態(tài)轉(zhuǎn)移方程如下:

νt為狀態(tài)噪聲,滿足νt~N(0,R) 的高斯分布.其中,R為測量噪聲,本文取R=0.001E2,E2為2 階單位矩陣.
則時刻t+1 的誤差增益、更新值和濾波誤差的協(xié)方差矩陣分別為

4 實驗結(jié)果
為了驗證本文算法的有效性,在Ubuntu 的ROS系統(tǒng)下,采用C++編程處理激光雷達(dá)采集的數(shù)據(jù).
由于城市道路環(huán)境相對單調(diào),在聚類算法實驗中,采用激光雷達(dá)固定,3 人在雷達(dá)面前自由活動,然后對人員進行聚類,最后將聚類結(jié)果用三維邊框進行框選,方便觀察效果.
為了驗證自適應(yīng)搜索半徑的作用,對比加入和未加入自適應(yīng)搜索半徑的DBSCAN 算法對同一數(shù)據(jù)的處理效果. 其中自適應(yīng)算法的搜索系數(shù)a取10,傳統(tǒng)算法的搜索半徑ε取0.2 m 和0.8 m,最小聚類數(shù)量均取MinPts 值取22. 其中第260 幀數(shù)據(jù)聚類的俯視圖效果如圖9 所示. 由圖9 可見:傳統(tǒng)算法搜索半徑取0.2 m 時漏檢了左側(cè)人員,如圖9(a);搜索半徑為0.8 m 時又出現(xiàn)了分割不足的現(xiàn)象,將中間和右側(cè)人員歸入一類,如圖9(b);而優(yōu)化后的算法可以檢測出所有人員,如圖9(c).

圖9 第260 幀的聚類結(jié)果Fig. 9 Clustering results at the frame 260th
為了驗證“橢球搜索”的作用,對比加入和未加入“橢球搜索”的算法對同一數(shù)據(jù)的處理效果.截取第280 幀結(jié)果的正視圖效果,如圖10 所示. 由圖10 可見:未加入“橢球搜索”存在分割不完全的現(xiàn)象,如圖10(a);加入“橢球搜索”后可以聚類出完整的障礙物點云,如圖10(b).

圖10 第280 幀的聚類結(jié)果Fig. 10 Clustering results at the frame 280th
城市道路的障礙物大部分為運動車輛,對障礙物檢測的實時性要求比較高. 在聚類算法實時性驗證和跟蹤算法實驗中,采集城市道路上的激光雷達(dá)數(shù)據(jù),該數(shù)據(jù)由2 臺安裝在“智軌”兩側(cè)的VLP-16 雷達(dá)在某市的城市道路采集.
為驗證代表點方法對DBSCAN 算法實時性的提升,對比采用和不采用代表點加速的算法對同一數(shù)據(jù)的處理效果. 統(tǒng)計第t1?2 幀到第t1+92 幀數(shù)據(jù)的聚類處理時間(t1∈t),每隔10 幀采樣一次,每次采樣取該幀前、后共5 幀的平均值,最后繪制曲線如圖11 所示. 由圖11 可見:采用代表點法的DBSCAN 算法處理同一幀數(shù)據(jù)的時間明顯小于不采用代表點法DBSCAN. 可求出傳統(tǒng)算法平均耗時0.015 1 s,代表點法加速算法平均耗時0.011 4 s,時間上縮短32%.

圖11 聚類所消耗的時間對比Fig. 11 Comparison of time consumed by clustering
為驗證跟蹤算法的可靠性,在城市道路數(shù)據(jù)中,對路上行駛車輛進行檢測并對車輛進行框選,然后對框選的車輛進行跟蹤和標(biāo)號(ID),對比同一車輛前后幀的標(biāo)號是否發(fā)生變化和不同車輛標(biāo)號是否不同,以驗證數(shù)據(jù)關(guān)聯(lián)和跟蹤算法的可靠性. 實驗結(jié)果如圖12 所示. 圖12(a)為第t2幀車輛目標(biāo)(t2∈t)標(biāo)號為13、16、20 和21,圖12(b)為第t2+1 幀跟蹤后對應(yīng)的位置;圖12(c)為第t3幀車輛目標(biāo)(t3∈t)標(biāo)號為33、50 和51 號的車輛,圖12(d)為第t3+1 幀跟蹤后對應(yīng)的位置. 由圖12 可見:本文對動態(tài)障礙物進行了穩(wěn)定檢測和跟蹤.

圖12 動態(tài)障礙物跟蹤效果Fig. 12 Effect of dynamic obstacle tracking
5 結(jié) 論
本文主要針對基于三維激光雷達(dá)的動態(tài)障礙物檢測和跟蹤問題進行研究. 在障礙物聚類過程中,對傳統(tǒng)的DBSCAN 聚類方法進行改進,提出“橢球搜索”和自適應(yīng)的搜索半徑提升了激光雷達(dá)點云的聚類效果,使用代表對象法改進搜索速度,同時提高了障礙物聚類的適應(yīng)性和實時性;在數(shù)據(jù)關(guān)聯(lián)過程中,考慮了障礙物的位置特征和幾何特征,利用多特征提高了障礙物關(guān)聯(lián)的可靠性;然后采用加權(quán)的最小二乘法對障礙物的速度進行預(yù)測和采用卡爾曼濾波算法對障礙物位置進行預(yù)測和跟新,從而實現(xiàn)多目標(biāo)跟蹤. 最后分別就聚類效果和跟蹤效果進行實驗分析,結(jié)果表明:采用本文方法在障礙物檢測時比傳統(tǒng)聚類方法在處理效果和時間上都得到了提升,并且能夠?qū)討B(tài)的障礙物進行穩(wěn)定地關(guān)聯(lián)和跟蹤. 實驗過程中還發(fā)現(xiàn),路旁的樹木等障礙物會對跟蹤算法準(zhǔn)確性造成影響. 因此,后續(xù)研究考慮加入點云的類別信息,提高復(fù)雜場景的跟蹤準(zhǔn)確率.
猜你喜歡
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:30
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
當(dāng)代陜西(2021年17期)2021-11-06 03:21:36
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
當(dāng)代陜西(2019年15期)2019-09-02 01:52:00
學(xué)苑創(chuàng)造·A版(2018年11期)2018-02-01 06:29:20
讀者(2017年5期)2017-02-15 18:04:18