借助技術改進物理實驗動態過程探究
2021-12-29 00:00:00葛元鐘
中小學數字化教學 2021年2期

摘要: 初中物理實驗教學中經常出現實驗現象不明顯、讀數困難和數據處理耗時過長等問題。將信息技術與課堂教學融合,改變實驗的動態過程,可讓實驗動態過程由快變慢,便于觀察,也使動態過程的數據記錄便捷化、數據分析即時化,彌補了傳統實驗不足,更好地解釋物理現象。
關鍵詞:數字化教學;初中物理;動態過程
利用現代技術加快推動人才培養模式改革,實現規模化教育與個性化培養的有機結合,是教育現代化的戰略任務之一,也是教育信息化的重要目標。在當前課堂教學中,教師應用信息技術可以更好地為初中物理實驗教學服務,解決物理實驗動態過程研究中存在的問題。
一、物理實驗及其數字化教學的現狀
(一)目前物理實驗中存在的問題
一是不易觀察動態實驗過程。學生要準確讀出溫度計、彈簧秤的示數,只能等器具穩定后再讀數。其實,對于彈簧振子的受力情況、連續變化的溫度和壓強、電動機啟動時電流的變化等動態物理量,實驗者無法精確測量,也無法及時記錄。二是記錄動態實驗過程耗時過長。在傳統實驗環境下,教師可以對視頻進行錄制并回放來觀察動態物理量。然而,教師用此法記錄實驗數據效率低下,常常望而卻步。另外,教師為了節約實驗時間,有時只能減少數據的采集數,導致實驗的可信度降低。
(二)數字化實驗的應用現狀
當前,信息技術與課堂教學融合已成趨勢,這種融合不僅促進了教師教學方式的改變,而且讓學生有多種學習方式可選擇。數字化信息系統實驗室(Digital Information System Lab,DISLab)是一種全新的實驗手段體系。它整合了傳感器、數據采集器、計算機三者的功能:傳感器替代了測量儀器用于采集多種物理量數據;數據通過采集器處理后傳到計算機;計算機對處理后的信息進行實時處理與分析。
實驗者借助信息技術可使物理實驗中的動態由快變慢,再到靜止,便于肉眼觀察。DISLab的工作原理是借助傳感器使一些非電學量(如力、壓強、溫度等)轉化為電學量,實現數字化顯示。實驗過程中,基于實驗數據繪制的圖形同步生成。
教師將傳統實驗改為數字化實驗,數據處理的時間比例從45%降至3%,探索研究的時間比例從6%升至57%,提高了學生學習的質量。教師可以有充足的時間對物理現象和物理規律進行深入分析和討論。
教師應用DISLab可使實驗動態過程由快變慢、動態過程的數據紀錄更便捷、動態過程的數據分析即時化,彌補傳統實驗的不足。
二、物理實驗動態過程的數字化探究
(一)觀察物理實驗動態過程
1.呈現最大靜摩擦動態轉變過程
人們用彈簧測力計可以粗略測得滑動摩擦力值,然而在實驗中用彈簧測力計鉤住小木塊并勻速直線拉動,使小木塊在長木板上滑動,操作起來有一定難度。實驗者需要時刻注視彈簧測力計,待示數穩定后讀數,而穩定的時段往往比較短,讀數難度較大。
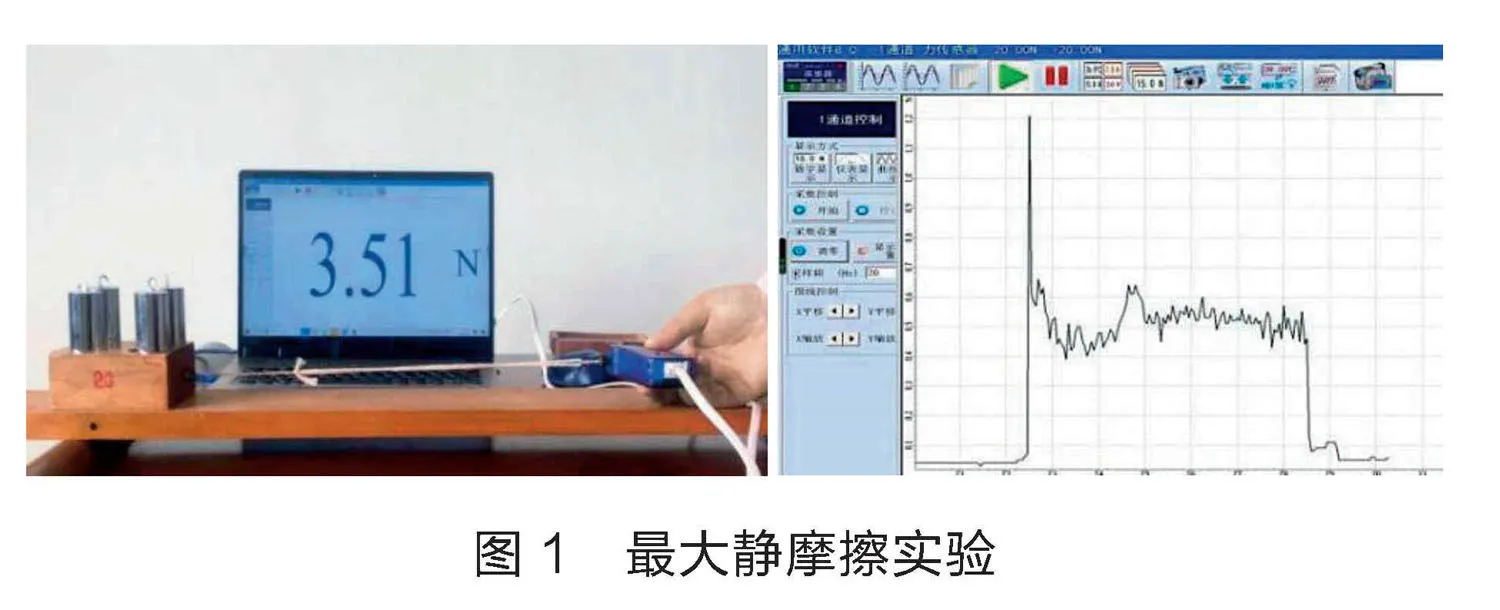
實驗中,彈簧測力計的拉力逐漸增大,達到一定數值后木塊開始滑動。由于彈簧測力計變化較快,相較滑動摩擦力,實驗者觀察最大靜摩擦力的難度更大。筆者使用DIS進行最大靜摩擦力實驗,讓學生在電腦屏幕上觀察拉力變大的全過程(如圖1)。根據平衡條件,可知靜摩擦力變化也是如此。曲線的峰值表征最大靜摩擦力值,曲線還揭示了最大靜摩擦力出現后摩擦力變化并趨于常數的規律。筆者用這段圖線,讓學生加深對最大靜摩擦力的理解。
2.探究杠桿平衡條件
在探究杠桿平衡條件的實驗中,鉤碼在實驗中只能產生豎直向下的力,自然懸掛時無法改變動力和阻力的方向,需要彈簧測力計充當阻力或者動力,通過改變拉力方向來改變力臂。傳統實驗中,彈簧測力計在改變拉力方向時難以準確讀數,只有停在某個角度時才能讀數。這不便于觀察示數變化。
其實,對于該實驗同樣可以用力傳感器來取代彈簧測力計。力傳感器在改變拉力方向時,獲得的拉力變化是實時且連續的,傳輸到計算機后得到的數據同樣是實時且連續的。相較于傳統實驗,數字化實驗的好處是不需要人工讀數,還可以揭示實時且連續的變化規律,在計算機上導出大量連續的實驗數據或直接以曲線圖的形式直觀呈現。
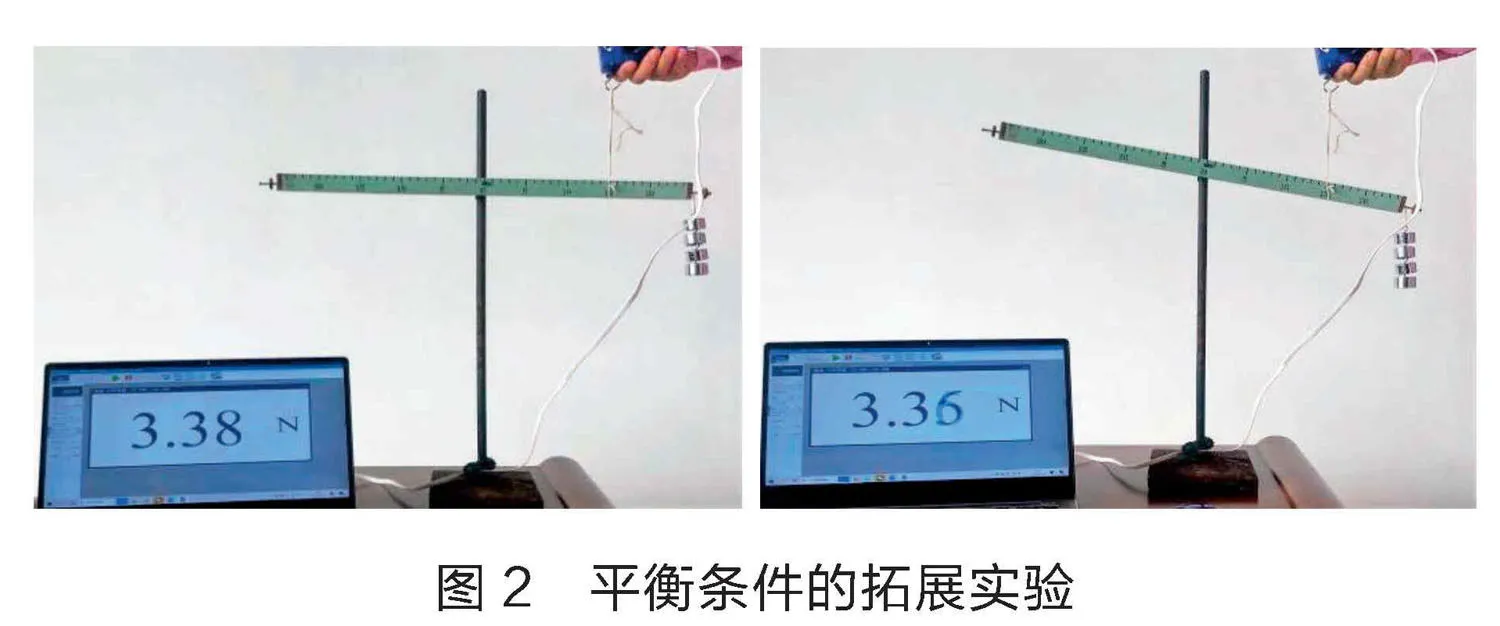
如果要做探究杠桿平衡條件的拓展實驗,同樣可以利用數字化實驗設備的便利性。傳統實驗中,讀數困難的問題難以解決,實驗者只能于固定位置,靜止不動時才能讀數,如果杠桿轉動起來,對于變化情況的觀察往往束手無策。筆者利用DIS實驗設備輕易完成動態變化的實驗操作,讓學生將主要精力放在操作上。在杠桿轉動過程中,如果力始終是豎直向上的,則向上的力保持不變(如圖2)。
3.解釋電動機啟動電流的動態過程
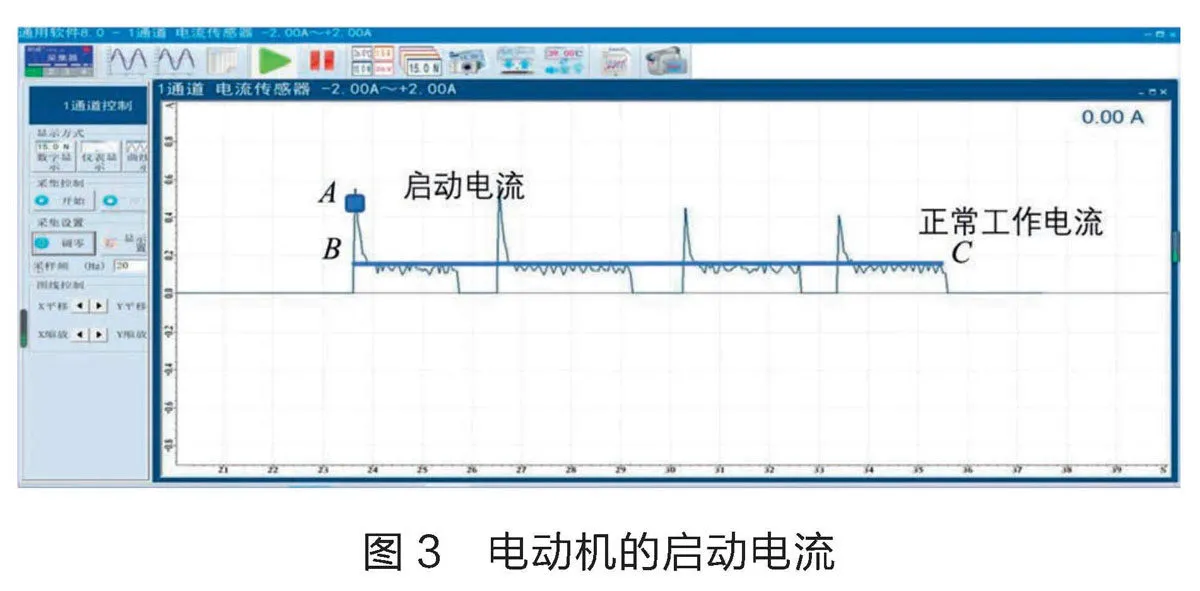
電動機通電瞬間,轉子處于靜止狀態,所有電能轉化為內能,轉子線圈相當于一個定值電阻,啟動電流比較大。然而,電動機的啟動電流和正常工作電流究竟相差多大,學生沒有感性認識。
筆者利用DISLab技術對電動機的啟動電流進行探究,對兩種電流的大小進行大致判斷。筆者利用DISLab技術生成啟動電流隨時間變化而變化關系圖(如圖3):點是電動機啟動時的最大電流,線段所在的縱坐標值是電動機的正常工作電流;電動機的啟動過程是很快的,在這個實驗中約為0.5秒,如果電動機功率大些,啟動時間可能更久一些;啟動電流時間是正常工作電流的3~5倍。通過觀察圖像,學生比較容易理解實驗現象和原理。
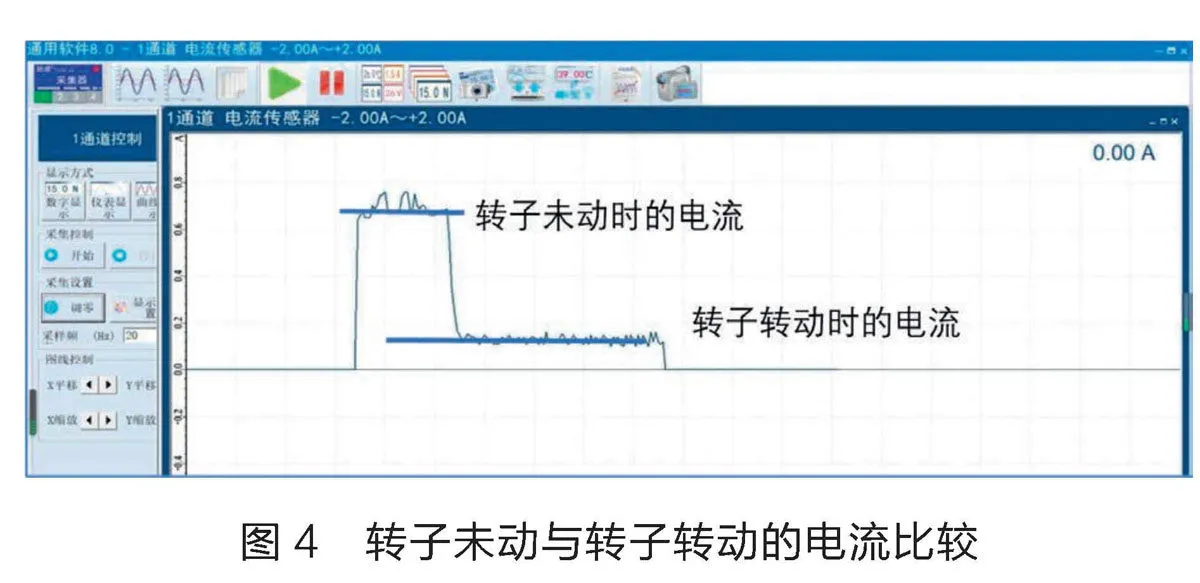
實驗者還可以利用DISLab對電動機轉子不動時所造成的危害進行探究。在實驗中,筆者緊緊握住電動機的轉子。此時,轉子的電流始終是正常工作電流的3~5倍(如圖4),轉子線圈處于短路狀態,電動機相當一個純電阻,所有電能都轉化為熱能。安裝電動機時,如果發現通電后轉子不動,首先要切斷電源,然后分析原因。
(二)記錄物理實驗動態過程
1.記錄蹦極中彈性繩受力動態
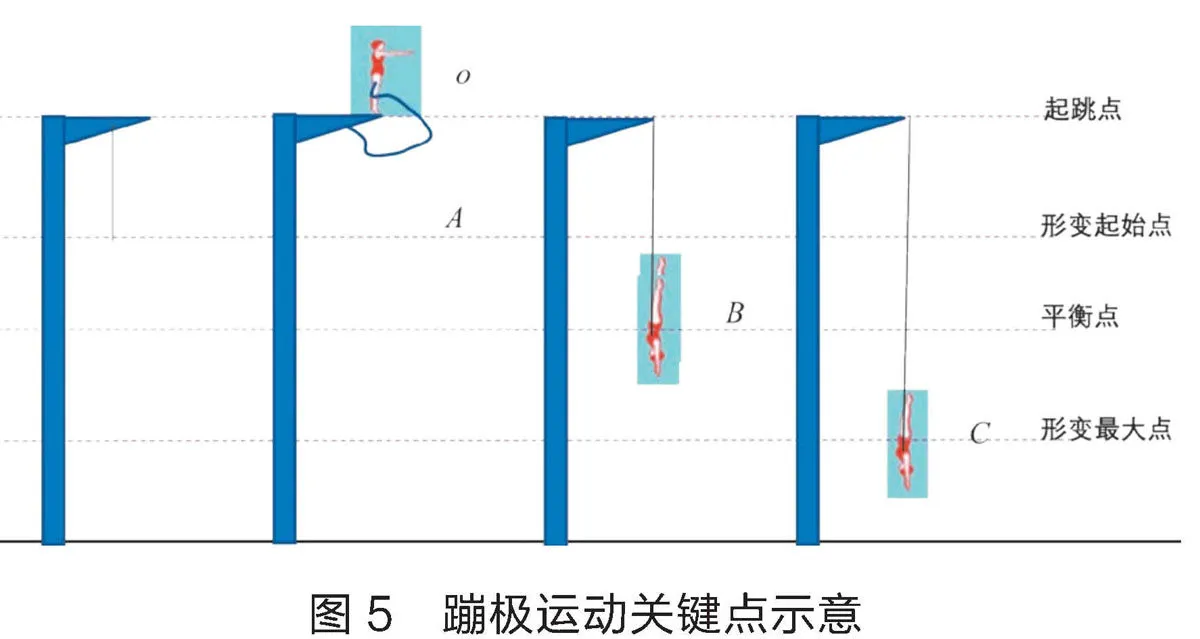
在蹦極過程中,當人體落到離地面一定距離時,橡皮繩會被拉開、繃緊,阻止人體繼續下落,當到達最低點時橡皮繩再次彈起(如圖5)。
為了更好地研究物體的受力情況,在課堂上教師常用一個砝碼和一根有彈性的繩子模擬蹦極過程。盡管教師講得很辛苦,但學生聽得似懂非懂——砝碼在下降過程中哪點的速度最大這個難點在傳統課堂上很難突破。
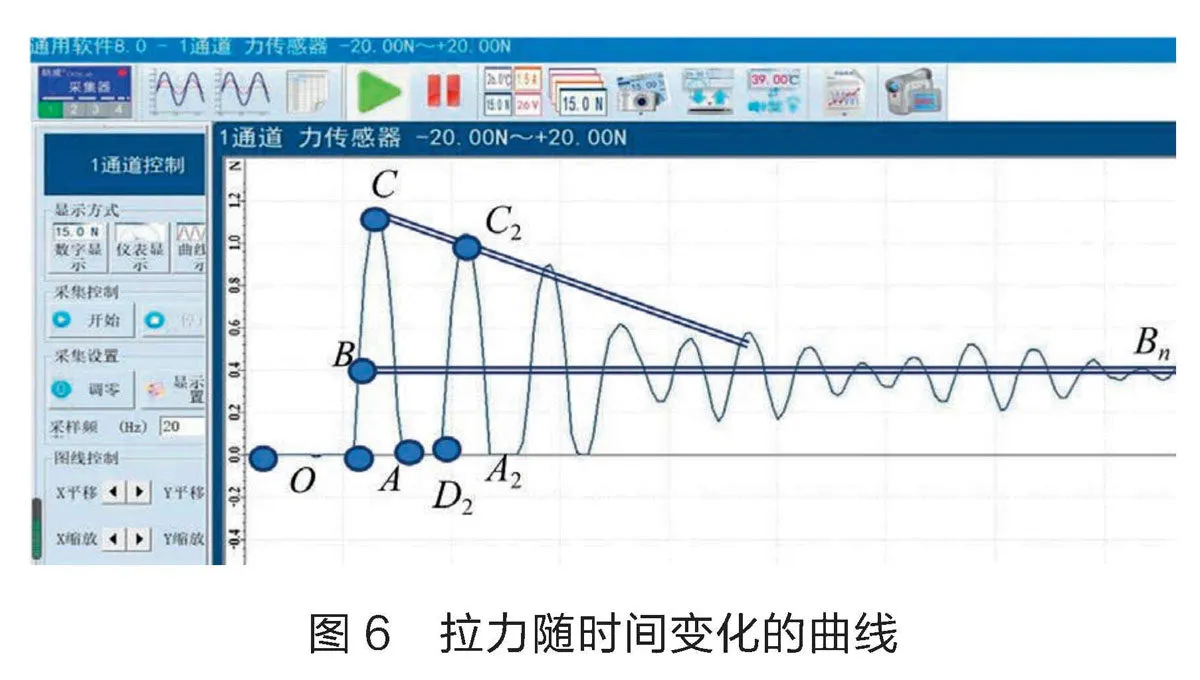
筆者在彈性繩子的一端接上拉力傳感器模擬蹦極過程,借助傳感器記錄砝碼下降、上升過程中橡皮繩的受力情況,并在電腦中形成力隨時間變化的曲線。由于選擇的橡皮繩比較細,導致鋼球不受橡皮繩拉力的滯空時間很短,與實際蹦極過程有一點差別。分析后,筆者在線上標出過程中的幾個關鍵點、、、(如圖6)。
學生從圖6觀察可知:蹦極有一段無彈力階段,即從點下降到點的過程中繩子不受拉力;到的過程中,拉力逐漸變大,階段拉力始終小于重力,鉤碼處于加速階段;點到點的過程中,拉力大于重力,鉤碼處于減速階段;點為形變最大點,彈性勢能最大;從點回到點還是要經過點,其中,階段是蹦極的第二個無彈力階段,點是蹦極的第二個低點。進一步分析還可得出如下結論:在整個曲線中,第一次下落時經過的點的速度最大,最后鉤碼停留在點;蹦極演示實驗中物重0.4牛,在最低點時彈力繩的拉力接近1.2牛。
2.處理重力與質量關系數據
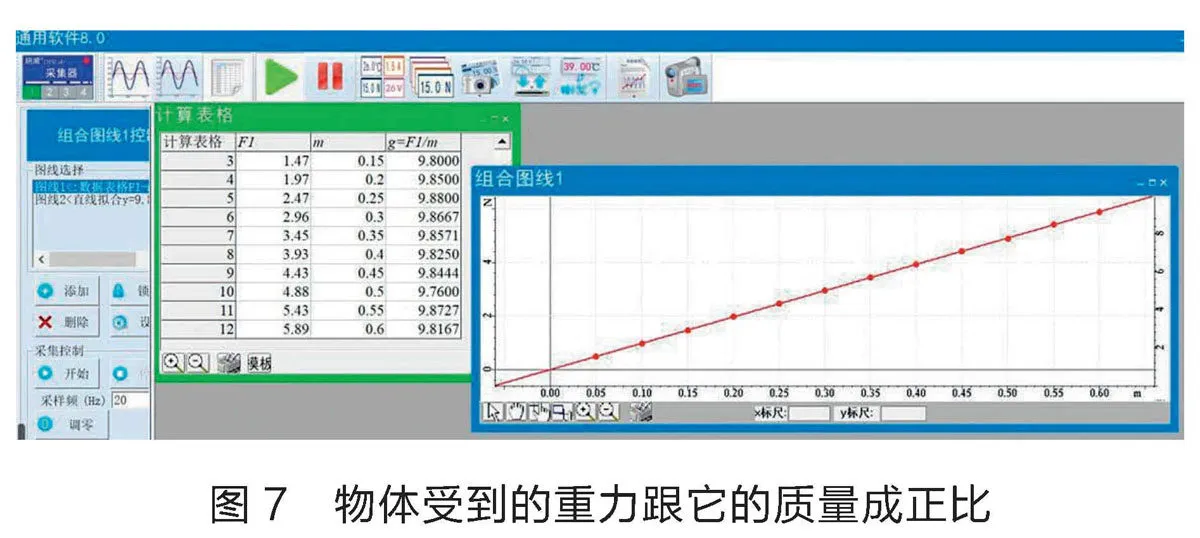
在探究重力與質量關系時,課堂上教師準備彈簧測力計和鉤碼讓學生進行定量探究。每小組有4個固定質量的鉤碼和一只彈簧測力計。實驗時,學生首先用彈簧測力計依次測出4個鉤碼受到的重力,將測量結果記錄在表1中,然后以質量為橫坐標,以重力為縱坐標,建立平面直角坐標系,分析得出物體受到的重力跟它的質量成正比。
如果用傳統方法做實驗,學生得到的數據點只有4個,但這4個數據的記錄及分析卻耗費許多時間。筆者借助DIS實驗設備中的力傳感器,將非電物理量力轉化為電信號傳輸到計算機,使其在探究重力與質量關系實驗中充當彈簧測力計的角色。
學生利用力傳感器做此實驗,不需要人工讀數,不需要人工記錄實驗數據,甚至不需要人工處理數據,只需將鉤碼掛在力傳感器的掛鉤上即可,由系統完成傳統實驗要求的所有操作。學生利用DIS做實驗,不會因為處理數據耗費大量時間,實驗中可以用更多的鉤碼得到更多的數據來分析重力與質量的關系。系統自動根據12組數據進行描點,生成物體受到的重力跟它的質量成正比的函數曲線(如圖7)。
三、總結反思
信息技術與教育教學深度融合給師生帶來很多便捷。傳統教學中的問題有了更多更有效的解決方案。然而,數字化教學對于學生學習來說也有不足,不宜過分依賴技術。
教師用信息技術處理數據雖然足夠迅速,但這個過程存在隱蔽性,導致學生理解起來有難度。例如,要用信息技術模擬關蹦極過程,教師應花一定時間作鋪墊,讓學生對蹦極有一定了解后再進行數字化實驗效果比較好。在課堂上筆者作了三次鋪墊后才用信息技術進行點撥。
第一次鋪墊是讓學生解一道題:
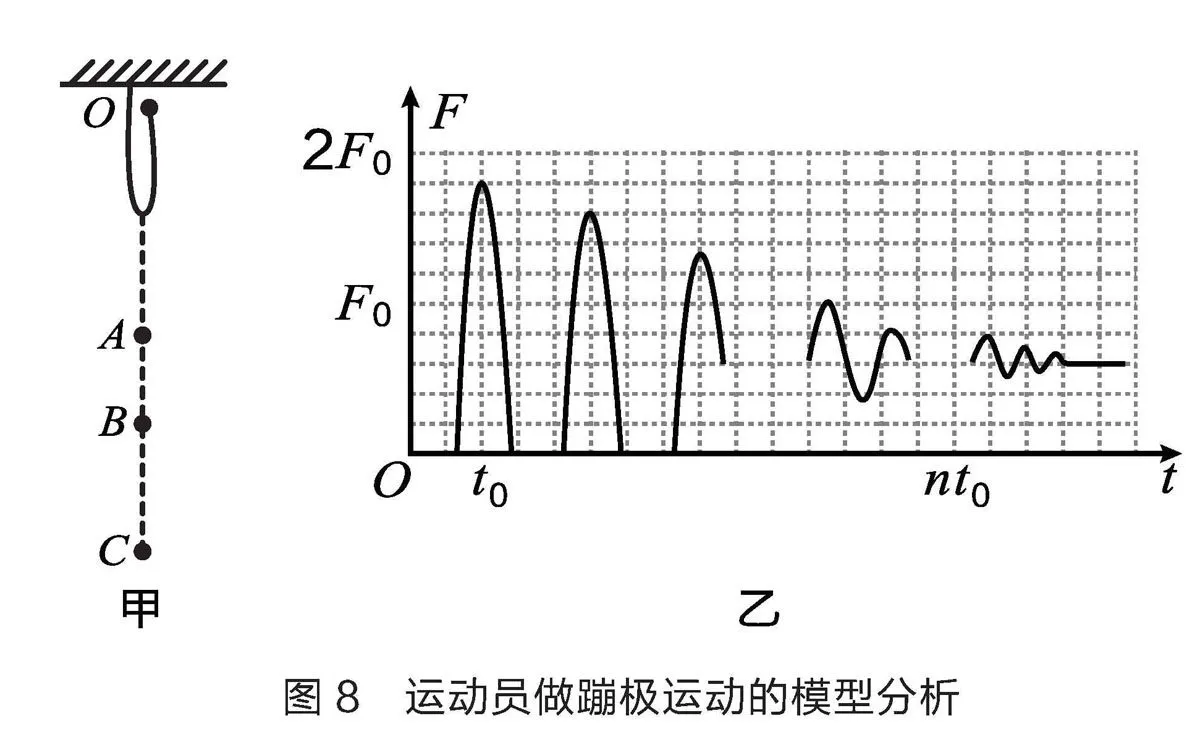
【舉例】某運動員做蹦極運動,如圖8甲所示,從高處點下落,點是彈性繩的自由落點,在點運動員所受彈力恰好等于重力,點是第一次下落到達的最低點。運動員所受彈性繩彈力的大小隨時間變化的情況如圖8乙所示(蹦極過程視為在豎直方向上的運動)。下列判斷正確的是( )。
A. 從點到點過程中運動員加速下落
B. 從點到點過程中運動員重力勢能增大
C. 時刻運動員動能最大
D. 運動員重力大小等于
學生通過解題,初步理解蹦極中的幾個關鍵點,為后續學習打下基礎。
中學生玩過蹦極的很少,即便玩過也不一定能分析蹦極的過程,但如有蹦極體驗,會激發學習熱情,提高課堂參與度。筆者播放蹦極視頻做第二次鋪墊。
筆者引導學生對幾個關鍵點進行受力分析,這是第三次鋪墊。學生對開始形變的點、形變時合力為0的點、形變最大點這三點進行分析,為探究蹦極時速度和能量的變化打好基礎。
在教育教學過程,教師要綜合考慮,科學施教。教師要用信息技術改進實驗而不是完全取代,在教學過程中不能用信息技術排斥傳統實驗,而要用信息技術為傳統實驗賦能。對于一些物理實驗,教師要考慮學生的學習特征與心智發展規律;對于一些數據,教師應要求學生自己一個一個地獲得,自主處理數據,建立模型,理解物理本質。
(作者系浙江省杭州市行知中學副校長,浙江省教壇新秀,杭州市學科帶頭人)
