FLS高級進近虛擬波束生成和引導指令計算
2022-01-11 13:55:04翟少博李廣文薛廣龍賈秋玲孫曉敏
西北工業大學學報 2021年6期
翟少博, 李廣文, 薛廣龍, 賈秋玲, 孫曉敏
1.西北工業大學 自動化學院, 陜西 西安 710072; 2.中國航空無線電電子研究所, 上海 200233
進近和著陸是航跡控制精度要求最為嚴苛的飛行階段,當前國內機場運行主要采用依賴于儀表著陸系統的精密進近(precision approach,PA)和非精密進近(non-precision approach,NPA)2種進近著陸方式。依賴于儀表著陸系統的精密進近對機場環境和導航設施要求較高,成本較大;非精密進近主要通過甚高頻全向無線電信標,無方向性信標等地面導航臺提供方位引導[1],對場地要求相對較低,但由于缺少垂直引導信息,對飛行員而言操作難度較大,容易造成不穩定進近。
隨著衛星定位技術和機載傳感器的發展,為了提高飛行機組在進近過程中對航跡偏差的感知能力,同時解決精密進近運行成本高和非精密進近風險大的問題,類似精密進近方式(precision-like approaches)開始發展,飛機進近穩定性和安全性得到提升。空客提出了將除了授權的所需導航性能(required navigation performance authorization required,RNP AR)以外的所有非精密進近統一到與儀表著陸系統(instrument landing system,ILS)類似的飛行管理著陸系統(FMS landing system,FLS)技術[2]。
FLS是一種類精密進近技術,在進行VOR、VOR/DME或RNAV進近時為機組提供類似ILS的座艙指示和指引,引導精度優于非精密進近。
FLS并非完全替代ILS,而是在沒有配備ILS的機場或配有ILS但下滑道(glide slope,GS)不工作時,為機組提供類似GS下滑波束的指引信息。其優點可概括為:①FLS進近提供了基于氣壓高度偏離的垂直引導,為飛行員和機組提供了下滑指引信息,提高了下滑感知能力;②FLS構建的虛擬航向道相比較VOR、NDB等提供航向引導的傳感器,有效地利用各導航源的融合信息,提升了機組對航跡偏差的感知能力,降低了飛行風險;③FLS進近引導技術將除RNP AR之外所有的非精密進近統一到“類似”ILS,簡化了進近操作程序。
FLS或與之類似的綜合進近導航(integrated approach navigation,IAN)[3]功能是現代和未來先進大型飛機飛行管理系統必備的功能。空客A380和A350系列飛機飛行管理系統中配備了FLS功能;波音737-900、B747、B747-B和B787機型也具備FLS功能類似的IAN功能[3];我國大型民用客機C919上由美國通用電氣公司(GE)提供的綜合模塊化航電系統也具備XLS功能[4]。
FLS高級進近引導技術是發展國產大飛機必須突破的核心技術之一,是提高進近過程中偏差感知能力、降低進場著陸段事故發生率的有效手段。雖然,我國借助于歐美的航電設備實現了C919飛機的首飛,但是從長遠來看,我國大飛機工程的發展必須依托于我國航空工業和國內技術力量,只有這樣才能有效牽引我國航空技術發展,并提升我國航空技術水平。隨著國際局勢的發展,特別是2018年美國對我國發起技術封鎖之后,這一要求更顯急迫。FLS高級進近技術作為先進飛行管理系統的核心,是我國必須要掌握和突破的關鍵技術。
本文針對FLS高級進近引導技術的虛擬波束生成和波束偏差計算問題進行研究,考慮與ILS的兼容設計FLS進近引導律。為檢驗本文所提算法的有效性,設計了FLS進近典型仿真測試場景并進行了測試。
1 FLS引導工作原理
FLS可以讓飛行機組按照“類似ILS”功能執行除了RNP AR以外的非精密進近,其工作原理如圖1所示。

圖1 FLS進近工作原理
飛行管理計算機根據導航數據庫生成最終進近段的FLS虛擬波束并發送給多模接收機;同時,大氣數據慣性基準系統(air data/inertial reference system,ADIRS)將飛機位置和氣壓高度發送給多模接收機;多模接收機計算飛機位置相對FLS波束的偏差,并將偽LOC偏差(F-LOC)和偽GS偏差(F-G/S)發送給飛行控制和飛行引導計算機及電子飛行指示系統。
在飛行管理系統中,FLS進近引導過程可分為進近能力判斷、虛擬波束生成、波束偏差計算和引導模式判斷4個階段,簡述如下:
1) FLS進近能力判斷
FLS進近能力是由飛機導航源完好性監控結果決定的飛機進近引導能力,分為RAW ONLY、F-APP+RAW和F-APP 3種情況。
機組按FLS功能執行非精密進近時,飛行管理系統首先根據最后進近航段和跑道情況判斷飛機是否具備實施FLS的條件,若最終進近航道和跑道航道偏差大于50°時,不能使用FLS功能;然后根據導航源完好性監控結果判斷FLS進近能力,當FLS進近能力為RAW ONLY時,不能使用FLS功能。
2) FLS虛擬波束生成
當飛行管理系統判斷當前進近具備實施FLS進近的條件且FLS進近能力滿足進近方式要求時,飛行管理計算機根據導航數據庫中存儲的數據和機場信息計算FLS虛擬波束。FLS虛擬波束是一條空間三維虛擬直線,如圖2所示。
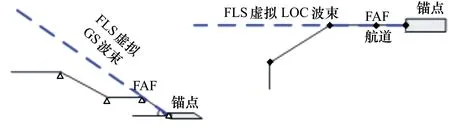
圖2 FLS虛擬波束
3) FLS波束偏差計算
當飛行管理系統中生成了FLS虛擬波束以后,結合飛機當前位置信息計算飛機相對于FLS波束的偏差信息,并發送到自動飛行系統。
4) FLS引導模式判斷
飛行管理系統計算FLS波束偏差的同時,根據水平偏差、垂直偏差及導航源完好性監控結果決定FLS引導模式的預位、截獲、接通時機,并將FLS引導模式信號發送給自動飛行系統。
2 基于導航數據庫信息生成FLS虛擬波束
FLS波束(FLS beam)是由飛行管理系統根據存儲在飛行管理計算機導航數據庫中的數據計算的,表示非精密進近NPA的最終進近航段,由錨點(anchor point)、航道(course)和梯度(slope)3個要素決定。如圖2所示。
錨點是計算FLS波束的要素之一,其位置取決于導航數據庫中發布的錯失進近點位置;航向用于確定最終進近的水平路徑;梯度用于確定最終進近的垂直路徑。最后進近定位點(final approach fix,FAF)是進場路線的最后一個導航點。
2.1 定 義
本文使用的一些縮略語定義如下:
①著陸入口點(landing threshold point,LTP)是下滑道按規定的基準高飛越的點,通常為跑道中線與入口的交點。
②錯失進近點(missed approach point,MAPt)是復飛程序起點的航路點,該點在官方公布的文檔中通常標注為MAPt或LTP,如圖3所示。
③最后終止點(final end point,FEP)是位于最終進近航道上的一個航路點,該點由最終進近航道(final approach course,FAC)和通過該航道跑道入口的垂線的交點定義。
④飛行航徑對正點(flight path alignment point,FPAP)與LTP在同一個方位平面,用于確定最后進近對正位置。當進近與跑道中線方向一致時,飛行航徑對正點位于反方向跑道入口或入口之外,通過一個到反方向跑道入口的距離確定位置。可分為圖3至5的3種情況:

圖4 有ILS進近且LOC臺距跑道末端305 m內
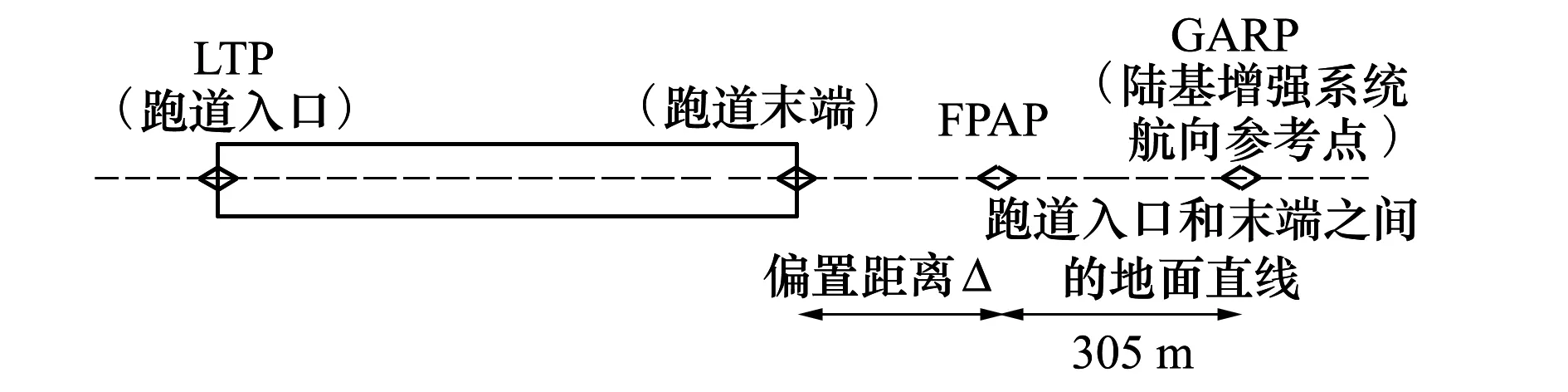
圖5 有ILS進近且LOC臺距跑道末端305 m外
⑥截獲地面點(GPIP)為最終進近航跡與跑道高度平面的交點。如圖6所示。
⑦穿越跑道入口高(threshold crossing height,TCH)是LTP點之上飛行航跡角的指定入口穿越高。
⑧飛行航跡角γ(flight path angle,FPA)是導航數據庫中規定的最后進近航跡的下滑角(梯度)。

圖6 GPIP、TCH和FPA示意圖
2.2 虛擬波束生成
FLS波束是基于MAPt相對跑道入口點的位置關系生成的,可分為如下3種情況:
1) MAPt位于跑道入口點之前
若MAPt位于跑道入口之前,如圖7所示。此時錨點位于由FMS計算得到的偽最終進近點(pseudo final end point)處,高度等于TCH,如果導航數據庫中沒有TCH,則錨點高度選在跑道入口高度+15.24 m處,FLS波束的航向等于最終進近段的航向,FLS波束的梯度等于FPA。

圖7 MAPt點位于跑道入口點之前的FLS波束
2) MAPt位于跑道入口點正上方
若MAPt位于跑道入口點正上方,如圖8所示。此時錨點在跑道入口點處,距跑道高度等于TCH,如果導航數據庫中沒有TCH,則錨點高度選在跑道入口高度+15.24 m處。FLS波束的航向等于最終進近段的航向,FLS波束的梯度等于FPA。

圖8 MAPt點位于跑道入口點正上方的FLS波束
3) MAPt位于跑道入口點之后
若MAPt位于跑道入口點之后,如圖9所示。此時錨點位于跑道起點,高度為TCH,如果導航數據庫中沒有TCH,則錨點高度選在跑道入口高度+15.24 m處。FLS波束的航向等于最終進近段的航向,FLS波束的梯度等于FPA。

圖9 MAPt點位于跑道入口點之后的FLS波束
3 FLS波束偏差計算和修正
FLS高級進近引導技術的一大優點就是提升機組對航跡偏差的感知能力,準確的偏差信息是進行FLS進近引導的關鍵。飛機相對于FLS波束的偏差信息,包括水平距離偏差、水平角度偏差、垂直距離偏差和垂直角度偏差。因為基于ILS的進近引導指令是基于調制深度差(difference in depth of modulation,DDM)計算的,考慮到與ILS的兼容,需要同時計算水平DDM和垂直DDM。
另外,由于在計算FLS垂直偏差時,飛機高度是氣壓高度,在目的機場溫度較低時,還需考慮溫度修正。
3.1 FLS虛擬波束描述坐標系定義
利用空間幾何關系計算飛機相對于FLS虛擬波束的偏差信息的關鍵是定義用以描述FLS波束的坐標系,根據FLS虛擬波束的生成原理可知FLS波束實質上是從錨點指向FAF點的直線。
本文以FAF點、錨點及FAF點在跑道高度平面的投影點為基準確定水平偏差基準面,如圖10所示。記FAF點在跑道高度平面的投影點為P1,錨點在地面的投影點為P2。

圖10 FLS虛擬波束描述坐標系
若已知地理坐標系中一點P的經度為λ,緯度為L,高度為H,則該點在地心空間直角坐標系(earth centered earth fixed,ECEF)中的坐標為

(1)
式中,RN為卯酉圈曲率半徑,計算公式為
RN=Re(1+esin2L)
(2)
Re為WGS-84地球長半軸,取值6 378 137 m,e為WGS-84地球扁率,取值1/298.257;則由地心指向點P的矢量可表示為
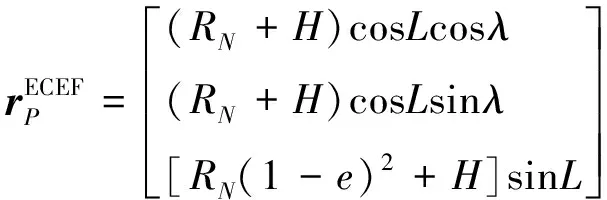
(3)
描述FLS波束實際上就是確定3個互相垂直的單位矢量urw,uvert和ulat。單位矢量uvert定義為過錨點投影點P2且與WGS-84橢球面正交的單位矢量
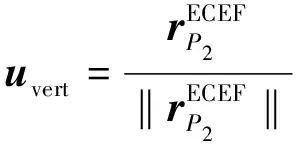
(4)
從P2指向FPAP點的單位矢量定義為
(5)
在水平方向單位矢量由矢量叉乘計算

(6)
沿跑道方向的單位矢量定義為
urw=ulat×uvert
(7)
則跑道所在水平面即為矢量urw和ulat定義的平面,urw和uvert定義的平面就是水平偏差基準面。
3.2 水平偏差計算
飛機相對于FLS波束的水平偏差包括水平距離偏差、水平角度偏差和水平DDM。參照圖11描述水平偏差計算過程。

圖11 水平偏差示意圖


(8)
水平角度偏差計算公式為

(9)
水平DDM計算公式為
(10)
式中:DG為從著陸入口點LTP到飛行航徑對正點FPAP的距離,Lcoursewidth為跑道入口處的航道寬度,由導航數據庫提供。
3.3 垂直偏差計算
飛機相對于FLS波束的垂直偏差包括垂直距離偏差、垂直角度偏差和垂直DDM。參照圖12描述垂直偏差的計算過程。

圖12 垂直偏差示意圖

(11)
垂直距離偏差計算公式為

(12)
垂直DDM計算公式為

(13)
3.4 地球曲率對FLS波束的修正
FLS高級進近執行非精密進近時,最終航徑穿越高度是錨定點的幾何高度,而在切入最終進近航徑時,由于地球曲率效應,氣壓高度表和公布的進近表中的高度有輕微偏差,如圖13所示。在此情況下,需要進行地球曲率的修正。

圖13 FLS波束G/S的地球曲率修正
根據地球曲率對FLS波束G/S的修正公式為
(14)
式中,D表示到錨定點的距離。
3.5 根據溫度的FLS波束修正
不同于ILS,FLS垂直偏差是以氣壓高度為基準面的,因而應考慮低溫對氣壓高度的修正。本文采用DO-283B[5]附錄H中按溫度進行高度修正公式
(15)
式中:ΔTstd是偏離國際標準大氣ISA的溫度偏差,單位為K;L0是第一個氣壓高度層國際標準大氣ISA的標準溫度直減率,取值為0.006 56 K/m;Δhpaircraft是飛機相對機場的氣壓高度,單位為m;hpaerodrome是機場場高(氣壓高度),單位為m。
4 FLS進近引導指令生成
FLS進近引導律包括飛機在被FLS波束截獲前的引導和飛機被FLS波束截獲后的引導兩部分。截獲前,根據給定航段參數及地速信息[6],進行引導;截獲后,采用飛機相對于FLS虛擬波束的偏差信息進行引導,從偏差計算過程可以看出,DDM是偏差角的線性函數,因而僅使用其中之一即可。本文在飛機被FLS波束截獲后采用DDM+距離偏差修正的方式引導飛機完成進近。
飛機被FLS波束截獲可分為水平截獲和垂直截獲。水平截獲即航向道截獲,如圖14所示,當飛機相對于F-LOC波束的水平角度偏差αlat小于截獲閾值ε時,飛機被FLS波束水平截獲,FLS水平截獲閾值ε=2°。
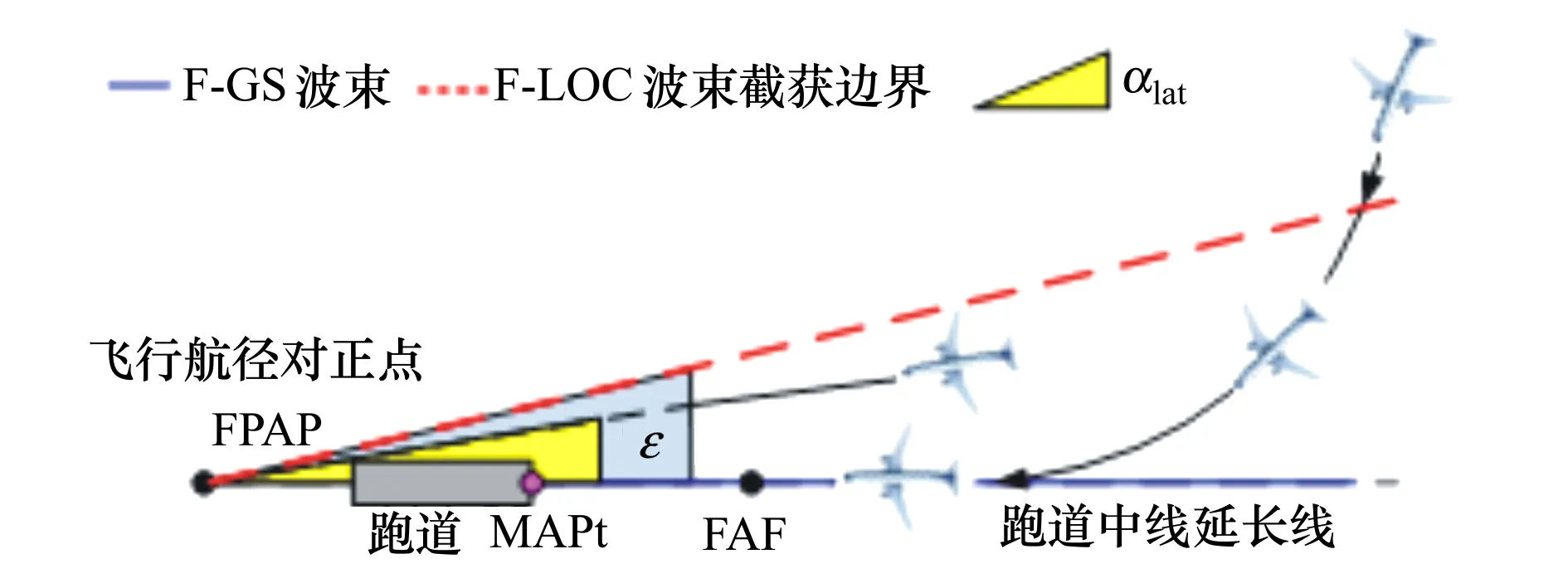
圖14 FLS進近過程中水平截獲過程示意圖
垂直截獲即下滑道截獲,如圖15所示,當飛機相對于F-GS波束的垂直角度偏差αv小于截獲閾值η時,飛機被FLS波束垂直截獲,垂直截獲閾值η=0.3°。
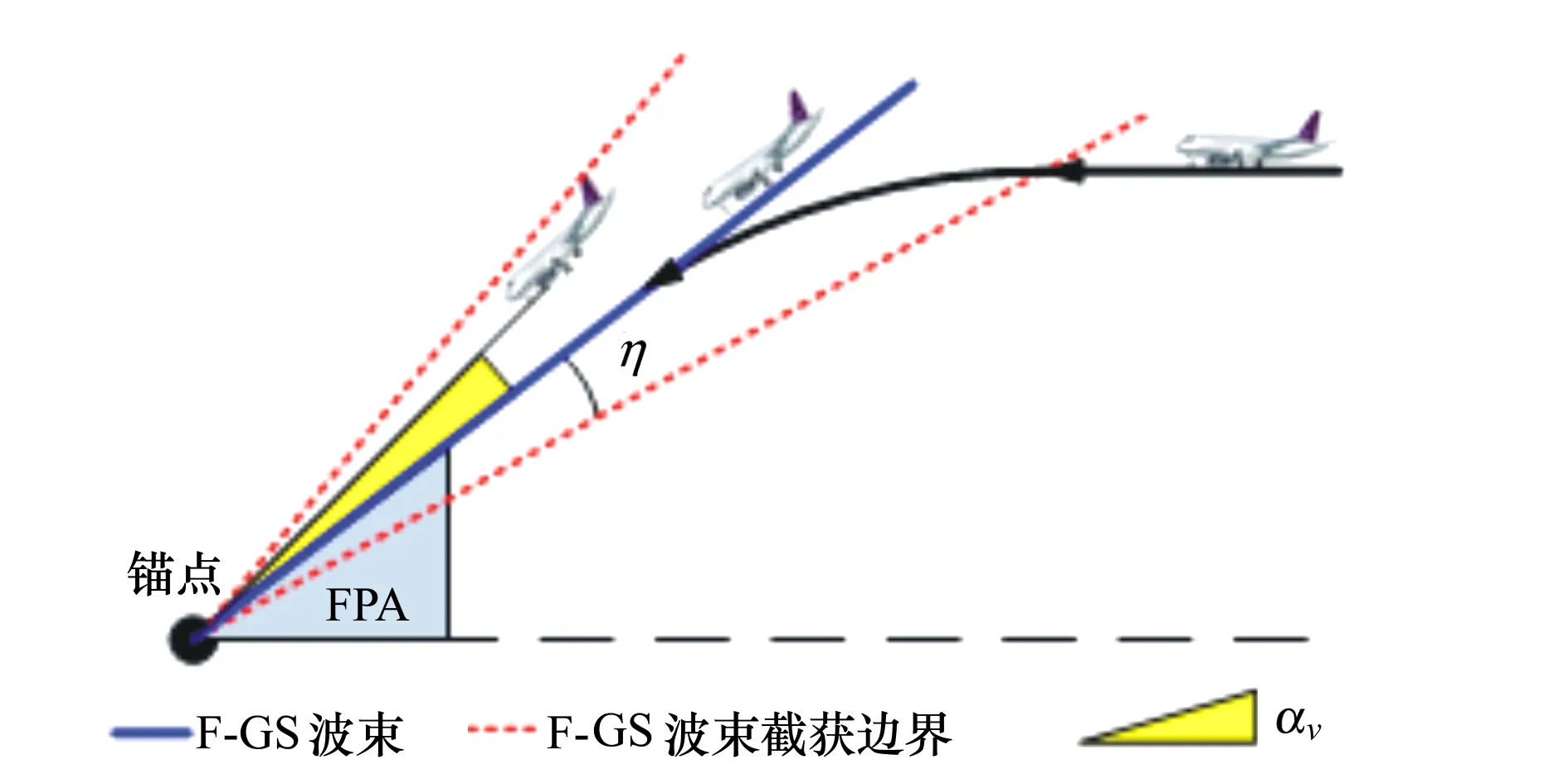
圖15 FLS進近過程中垂直截獲過程示意圖
4.1 水平引導指令生成
飛機水平航跡由給定的航線(由程序航段、航路點、保持方式等組成),與FMS計算的各種轉彎點和航段終止點組成,整個水平航線按直線段和轉彎段定義各個航段。
在進近引導過程中,現有進近方式(ILS、VOR等)在橫航向采用截獲波束徑向線的方式進行水平引導。A300-600飛機維護手冊[7]中給出的利用VOR執行非精密進近時的引導指令計算公式為
(16)
其中k0表示截獲標志。即在飛機未截獲VOR徑向線時采用航向預選的方式引導飛機飛行;在截獲VOR徑向線以后采用偏差角修正的方式引導飛機飛行。
由于在最后進近段截獲航道后,需要高精度的航跡控制,而現有進近引導方式引導指令計算方法僅利用角度偏差信息,通過比例控制實現對飛機的引導。此種控制方法在引導飛機進近時可能會出現飛機航向與跑道方位一致,但飛機實際偏離跑道的情況,嚴重情況下飛機會沖出跑道。對此,本文在引導指令計算時,同時引入了距離偏差、角度偏差和地速信息對引導指令進行修正。
飛機被FLS波束水平截獲前的航段可以分為直線航段和圓弧航段2種,直線航段的引導律為
φg=k1·ΔD+k2·(χleg-χ)·VGND
(17)
式中:k1,k2為增益系數;ΔD為飛機相對于期望航跡的側偏距,χleg為航段方位角,χ為飛機當前航跡方位角;VGND為飛機地速;φg為期望滾轉角。
圓弧航段的引導律為
(18)
式中:k3,k4為增益系數;g為重力加速度;V為飛機當前真空速;Rarc為圓弧航段轉彎半徑。
飛機被FLS波束水平截獲后,引導律為
φg=Kχ·VGND·(χFLS-χ)+KdlatDlat+KllDDMlat
(19)
式中:χFLS為FLS波束航向;Kχ,Kdlat和Kl為增益系數。
(19)式較(16)式引入了水平距離偏差Dlat,使用地速和航跡偏差角的乘積VGND·(χFLS-χ)作為水平距離偏差的微分項,增加了阻尼;充分利用偏差信息,同時引入距離偏差和角度偏差信息對引導指令進行修正,且由于引入了地速,本文提出的引導指令對于有風情況下的控制也能達到較好的效果。
4.2 垂直引導指令生成
飛機垂直引導通過垂直速度進行控制。飛機被FLS波束垂直截獲前,期望垂直速度計算公式為

(20)

飛機被FLS波束垂直截獲后,期望垂直速度計算公式為
(21)
式中:γFLS為FLS波束梯度;Kdver,Kv為增益系數。
5 FLS高級進近引導仿真算例
5.1 FLS高級進近典型仿真測試場景設計
為模擬FLS進近引導過程,檢驗本文所提算法的有效性,建立如圖16所示飛機進近著陸場景。該進近著陸場景包括著陸機場模型和飛機飛行航跡。

圖16 FLS高級進近測試場景圖
飛機飛行航跡分為兩部分:①FAF前的水平段飛行,用于模擬飛機被FLS水平波束截獲的過程;②FAF后航跡,用于模擬FLS縱向進近引導過程。
著陸機場模型主要包括降落跑道的幾何信息(跑道長度、寬度和機場標高)及方位信息;關鍵點位置坐標:LOC信標臺經緯高、GS下滑臺經緯高、復飛點MAPt經緯高信息。機場幾何信息主要為飛機提供側偏限制和滑跑距離限制;跑道方位和關鍵點位置坐標為飛機著陸提供位置基準,起到定位作用。
5.2 FLS高級進近測試算例描述
FLS高級進近用于執行非精密進近,在建立目視進近或達到決斷高度后即完成FLS操作流程。實施FLS高級進近需要導航數據庫提供的信息及具體參數如表1所示:

表1 FLS高級進近引導仿真所需信息
飛機的初始位置為IAF點,初始飛行航向為225°。IF為旁切航路點,轉彎半徑為4 000 m。
5.3 仿真結果與分析
根據設置的仿真算例可知,MAPt點位于跑道入口點正上方,因而錨點位置與著陸入口點LTP一致,高度等于TCH,即錨點在地理坐標系中的經緯高位置為:(108.287 0°,33.573 6°,50 m)。
參照航空器運營人全天候運行要求(AC-91-FS-2012-16)[8]中對進近系統性能評估的條件要求,在最后進近段分別進行無風、5.144 m/s側風、10.289 m/s逆風和5.144 m/s順風條件下的FLS進近引導仿真測試。
按照4.1節和4.2節所述的FLS進近引導律設計橫側向和縱向引導律,無風情況下的橫側向和縱向引導效果如圖17至18所示。結果表明,飛機能夠按照期望航跡飛行,在被FLS波束截獲以后,飛機能夠沿波束中心線執行FLS進近。
飛機在執行FLS進近過程中的姿態變化如圖19至20所示。圖19表明,120 s前飛機平飛,俯仰角保持在配平俯仰角處;300 s后,飛機被FLS波束垂直截獲后,按照固定梯度下降,此時航跡傾斜角固定,飛機姿態穩定,俯仰角保持不變。
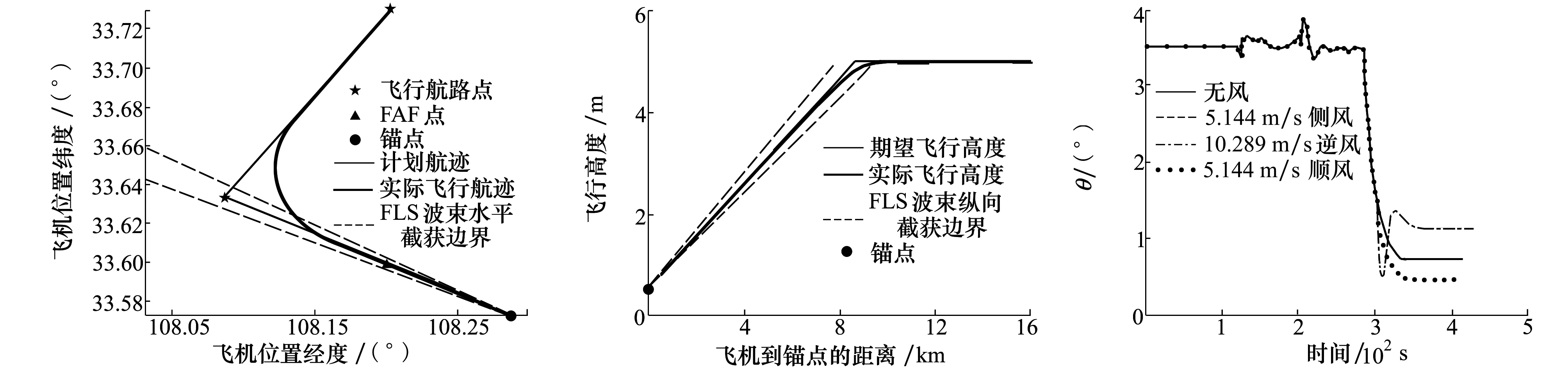
圖17 飛機水平剖面航跡 圖18 飛機飛行高度變化曲線圖19 飛機俯仰姿態變化曲線

圖20 飛機滾轉姿態變化曲線
圖20表明,飛機在120~250 s間出現大幅滾轉,滾轉角有2個波谷,第一個波谷出現在飛機進入圓弧段時需要快速調整航向實現圓弧跟隨;第二個波谷出現在飛機被FLS波束水平截獲后,飛機快速調整航向至與FLS波束航向一致;由于120至250 s間的大幅滾轉,且飛機橫縱向存在耦合,俯仰姿態出現波動。
飛機在最后進近段相對于FLS波束的偏差變化過程如圖21至26所示。
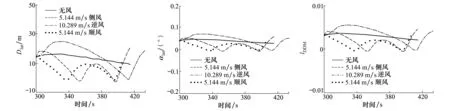
圖21 最后進近段水平距離 圖22 最后進近段水平角度圖23 最后進近段水平偏差變化曲線 偏差變化曲線DDM變化曲線
圖24 最后進近段垂直距離 圖25 最后進近段垂直角度圖26 最后進近段垂直偏差變化曲線偏差變化曲線 DDM變化曲線
仿真結果表明:按本文提出的波束偏差和引導指令計算算法執行FLS進近,能夠達到高精度的引導效果。水平角度偏差保持在±0.1°以內,垂直角度偏差穩定在±0.05°范圍內。控制引導效果能夠滿足《GJB 2191-1994有人駕駛飛機飛行控制系統通用規范》[9]中對進近引導的要求。
6 結 論
本文在分析FLS高級進近引導流程的基礎上,對FLS虛擬波束生成、波束偏差和引導指令計算2個關鍵問題進行了研究,提出了基于導航數據庫信息的FLS虛擬波束生成算法和基于空間幾何關系的FLS波束偏差和引導指令計算算法;利用計算得到的偏差信息,同時引入角度偏差和距離偏差設計引導律,實現了FLS高級進近引導,為完善大飛機飛行管理功能和實現大型客機航電系統關鍵技術國產化提供了算法支撐。
猜你喜歡
小哥白尼(軍事科學)(2022年3期)2022-06-09 03:11:24
環球時報(2022-05-30)2022-05-30 15:16:57
美與時代·美術學刊(2022年3期)2022-04-27 01:18:15
民用飛機設計與研究(2020年4期)2020-11-27 17:34:02
火花(2019年12期)2019-12-26 01:00:28
當代陜西(2019年11期)2019-06-24 03:40:28
人大建設(2019年12期)2019-05-21 02:55:32
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
小學生導刊(低年級)(2016年8期)2016-09-24 22:09:04
學苑創造·A版(2015年11期)2016-01-14 09:03:27
