虛擬環(huán)境交流底盤測(cè)功機(jī)試驗(yàn)系統(tǒng)設(shè)計(jì)
2022-01-13 10:23:46張曉瑞周志立
關(guān)鍵詞:計(jì)算機(jī)系統(tǒng)
張曉瑞,周志立
(1.西安理工大學(xué) 機(jī)械與精密儀器工程學(xué)院,陜西 西安 710048;2.河南科技大學(xué) 車輛與交通工程學(xué)院,河南 洛陽(yáng) 471003)
0 引言
車輛底盤測(cè)功機(jī)試驗(yàn)與路面試驗(yàn)相比,具有安全性高、再現(xiàn)性好、經(jīng)濟(jì)性好、試驗(yàn)速度快、精度高、可比性好等優(yōu)點(diǎn),在其試驗(yàn)中,實(shí)現(xiàn)室內(nèi)、室外實(shí)車試驗(yàn)環(huán)境的一致性,一直是科研人員的重要研究課題[1-2]。虛擬試驗(yàn)是車輛新產(chǎn)品評(píng)估驗(yàn)證的先進(jìn)方法之一,虛擬現(xiàn)實(shí)技術(shù)的應(yīng)用為虛擬試驗(yàn)的實(shí)現(xiàn)提供了支撐[3-4]。虛擬試驗(yàn)通過(guò)創(chuàng)建試驗(yàn)的虛擬環(huán)境,使車輛室內(nèi)試驗(yàn)更加接近室外試驗(yàn)的環(huán)境條件。目前,國(guó)內(nèi)外的汽車公司及研究機(jī)構(gòu)都在積極地進(jìn)行基于虛擬環(huán)境的模擬駕駛研究,主要集中在室內(nèi)實(shí)現(xiàn)真實(shí)駕駛的模擬[5-8],但很少將其和車輛試驗(yàn)系統(tǒng)相結(jié)合,進(jìn)行室內(nèi)車輛性能的測(cè)試[9-12]。本文根據(jù)車輛底盤測(cè)功機(jī)試驗(yàn)的功能,通過(guò)分析虛擬環(huán)境下底盤測(cè)功機(jī)試驗(yàn)系統(tǒng)的技術(shù)需求,設(shè)計(jì)基于虛擬環(huán)境的交流底盤測(cè)功機(jī)試驗(yàn)系統(tǒng)。通過(guò)對(duì)虛擬現(xiàn)實(shí)技術(shù)、動(dòng)態(tài)加載控制技術(shù)和試驗(yàn)系統(tǒng)平臺(tái)技術(shù)等關(guān)鍵技術(shù)的應(yīng)用,使構(gòu)造的室內(nèi)底盤測(cè)功機(jī)試驗(yàn)系統(tǒng)的測(cè)試結(jié)果與室外車輛性能測(cè)試更為接近。
1 試驗(yàn)系統(tǒng)功能及技術(shù)需求分析
1.1 功能需求分析
車輛底盤測(cè)功機(jī)試驗(yàn)系統(tǒng)主要是為車輛性能的測(cè)試提供通用試驗(yàn)平臺(tái),通過(guò)應(yīng)用本系統(tǒng),可以測(cè)試不同運(yùn)行環(huán)境下的車輛性能。因此,試驗(yàn)測(cè)試系統(tǒng)應(yīng)具備如下功能:
(Ⅰ)創(chuàng)建虛擬環(huán)境。虛擬環(huán)境應(yīng)具有較高的逼真度,能夠模擬車輛在道路上的不同環(huán)境,實(shí)現(xiàn)駕駛員操縱引導(dǎo),能夠?yàn)轳{駛員提供深度的體驗(yàn),使其具有身臨其境的感覺。
(Ⅱ)加載實(shí)時(shí)行駛阻力。系統(tǒng)能夠根據(jù)虛擬環(huán)境參數(shù)和試驗(yàn)車輛參數(shù),控制底盤測(cè)功機(jī)進(jìn)行模擬加載,實(shí)現(xiàn)試驗(yàn)車輛行駛實(shí)時(shí)模擬,以還原車輛在真實(shí)路面的行駛工況。
(Ⅲ)支撐試驗(yàn)運(yùn)行。系統(tǒng)能夠以性能穩(wěn)定的運(yùn)行支撐框架為基礎(chǔ),進(jìn)行系統(tǒng)內(nèi)部數(shù)據(jù)實(shí)時(shí)互通,集功能實(shí)現(xiàn)、試驗(yàn)數(shù)據(jù)管理、試驗(yàn)流程管理、人機(jī)交互及驗(yàn)證評(píng)價(jià)于一體,保證試驗(yàn)系統(tǒng)的功能和通用性。
1.2 技術(shù)需求分析
為使車輛底盤測(cè)功機(jī)系統(tǒng)運(yùn)行并實(shí)現(xiàn)其功能,其技術(shù)需求為:
(Ⅰ)虛擬現(xiàn)實(shí)技術(shù)[13-14]。虛擬現(xiàn)實(shí)技術(shù)是指采用環(huán)境建模技術(shù)、可視化技術(shù)、人機(jī)交互技術(shù)在計(jì)算機(jī)上生成環(huán)境的技術(shù)。為了使底盤測(cè)功機(jī)試驗(yàn)系統(tǒng)具有更加接近實(shí)車測(cè)試的效果,基于虛擬現(xiàn)實(shí)構(gòu)建實(shí)車試驗(yàn)視景系統(tǒng),實(shí)現(xiàn)虛擬環(huán)境和試驗(yàn)車輛間的數(shù)據(jù)交互。
(Ⅱ)動(dòng)態(tài)加載控制技術(shù)。動(dòng)態(tài)加載控制技術(shù)指根據(jù)試驗(yàn)過(guò)程中環(huán)境參數(shù)和車輛運(yùn)動(dòng)參數(shù),通過(guò)加載力的數(shù)學(xué)模型,控制加載電機(jī)對(duì)試驗(yàn)車輛進(jìn)行實(shí)時(shí)加載,以實(shí)現(xiàn)車輛行駛阻力的實(shí)時(shí)模擬。
(Ⅲ)試驗(yàn)系統(tǒng)平臺(tái)技術(shù)。平臺(tái)技術(shù)以計(jì)算機(jī)為載體,為實(shí)車試驗(yàn)提供高效可靠的試驗(yàn)控制、信息傳輸及信息集成環(huán)境[15-16]。建立一套集分布式建模、管理、監(jiān)控、驗(yàn)證、評(píng)價(jià)于一體的車輛底盤測(cè)功機(jī)試驗(yàn)平臺(tái)系統(tǒng),融合多領(lǐng)域商用軟件,在不同的試驗(yàn)項(xiàng)目要求下,擴(kuò)展配置不同的軟硬件模塊,通過(guò)統(tǒng)一軟、硬件接口標(biāo)準(zhǔn),支撐系統(tǒng)內(nèi)部軟、硬件數(shù)據(jù)實(shí)時(shí)通信,以保證試驗(yàn)項(xiàng)目的順利進(jìn)行。
2 試驗(yàn)系統(tǒng)設(shè)計(jì)及關(guān)鍵技術(shù)的實(shí)現(xiàn)
2.1 底盤測(cè)功機(jī)試驗(yàn)系統(tǒng)設(shè)計(jì)
根據(jù)試驗(yàn)系統(tǒng)功能需求,設(shè)計(jì)的底盤測(cè)功機(jī)試驗(yàn)系統(tǒng)如圖1所示。試驗(yàn)時(shí),虛擬環(huán)境計(jì)算機(jī)模擬車輛在道路上的行駛環(huán)境,并通過(guò)頭盔與音響為駕駛員提供視覺與聽覺反饋,駕駛員根據(jù)虛擬環(huán)境系統(tǒng)提供的反饋信息及自己的駕駛經(jīng)驗(yàn),采取相應(yīng)的加速、減速及換擋等駕駛行為。測(cè)控子系統(tǒng)根據(jù)虛擬環(huán)境子系統(tǒng)提供的環(huán)境參數(shù)及車輛的運(yùn)動(dòng)參數(shù)計(jì)算得到加載力模型,通過(guò)控制測(cè)功機(jī)及電氣子系統(tǒng)中的變頻柜,進(jìn)而控制加載電機(jī)對(duì)滾筒實(shí)時(shí)加載以模擬其在真實(shí)道路上的行駛,并通過(guò)功率柜逆變實(shí)現(xiàn)能量回饋電網(wǎng)。同時(shí),通過(guò)傳感器采集駕駛員駕駛行為及車輛性能信息。數(shù)據(jù)經(jīng)過(guò)信號(hào)調(diào)理后傳輸?shù)綔y(cè)控計(jì)算機(jī)。試驗(yàn)管理計(jì)算機(jī)與測(cè)控計(jì)算機(jī)通過(guò)以太網(wǎng)進(jìn)行信息交互,管理試驗(yàn)數(shù)據(jù),監(jiān)控試驗(yàn)順利進(jìn)行,根據(jù)相關(guān)評(píng)價(jià)指標(biāo)及方法對(duì)車輛性能、駕駛員水平及環(huán)境進(jìn)行評(píng)價(jià)。

圖1 底盤測(cè)功機(jī)試驗(yàn)系統(tǒng)
2.1.1 虛擬環(huán)境子系統(tǒng)
虛擬環(huán)境子系統(tǒng)為駕駛員提供駕駛環(huán)境,同時(shí)發(fā)布環(huán)境參數(shù),得到加載力數(shù)學(xué)模型,對(duì)試驗(yàn)車輛進(jìn)行實(shí)時(shí)加載。該子系統(tǒng)主要由模型數(shù)據(jù)庫(kù)、軟件系統(tǒng)、顯示輸出設(shè)備等組成,如圖2所示。

圖2 虛擬環(huán)境子系統(tǒng)
模型數(shù)據(jù)庫(kù)存放聲音模型、道路環(huán)境模型、交通環(huán)境模型、氣象環(huán)境模型及試驗(yàn)車輛模型等。聲音模型主要包括車輛行駛過(guò)程中發(fā)動(dòng)機(jī)聲音、胎噪及周圍環(huán)境中的各種聲音。道路環(huán)境模型主要包括地形,周圍建筑物,實(shí)際道路的形狀、長(zhǎng)度、寬度、俯仰角,路基材料及滾動(dòng)阻力因數(shù)等參數(shù)。交通環(huán)境模型主要包括周圍車輛、行人、紅綠燈等交通狀況,并設(shè)置周圍車輛的行駛路線、速度及加速度等。氣象環(huán)境模型主要是對(duì)周圍的環(huán)境、溫度、天氣等細(xì)節(jié)進(jìn)行建模。試驗(yàn)車輛模型是實(shí)際試驗(yàn)車輛的動(dòng)力學(xué)模型,在底盤測(cè)功機(jī)上,駕駛員根據(jù)視覺反饋及聽覺反饋調(diào)整駕駛行為,所做的一系列動(dòng)作通過(guò)傳感器經(jīng)處理后,施加于試驗(yàn)車輛,實(shí)現(xiàn)車輛與虛擬環(huán)境的交互。
虛擬環(huán)境計(jì)算機(jī)運(yùn)行軟件系統(tǒng)能夠及時(shí)將物體模型從模型數(shù)據(jù)庫(kù)中取出,計(jì)算它們所在的位置、方向及光學(xué)特征,實(shí)時(shí)渲染,使整個(gè)圖像具有較高的分辨率、清晰度和色彩還原度,使其更加接近于真實(shí)的道路場(chǎng)景,同時(shí)還可以對(duì)整個(gè)試驗(yàn)場(chǎng)景進(jìn)行視頻的錄制。
顯示輸出設(shè)備包括頭盔和音響,為駕駛員提供視覺反饋和聽覺反饋。
2.1.2 測(cè)功機(jī)及電氣子系統(tǒng)
測(cè)功機(jī)及電氣子系統(tǒng)保證車輛驅(qū)動(dòng)輪與滾筒表面有足夠的附著力,能將吸收的功率轉(zhuǎn)換為電能回饋給電網(wǎng),并準(zhǔn)確地執(zhí)行測(cè)控系統(tǒng)發(fā)出的指令,自動(dòng)調(diào)節(jié)加載力,主要由功率柜、變頻柜、加載電機(jī)、變頻風(fēng)機(jī)及滾筒等組成,如圖3所示。
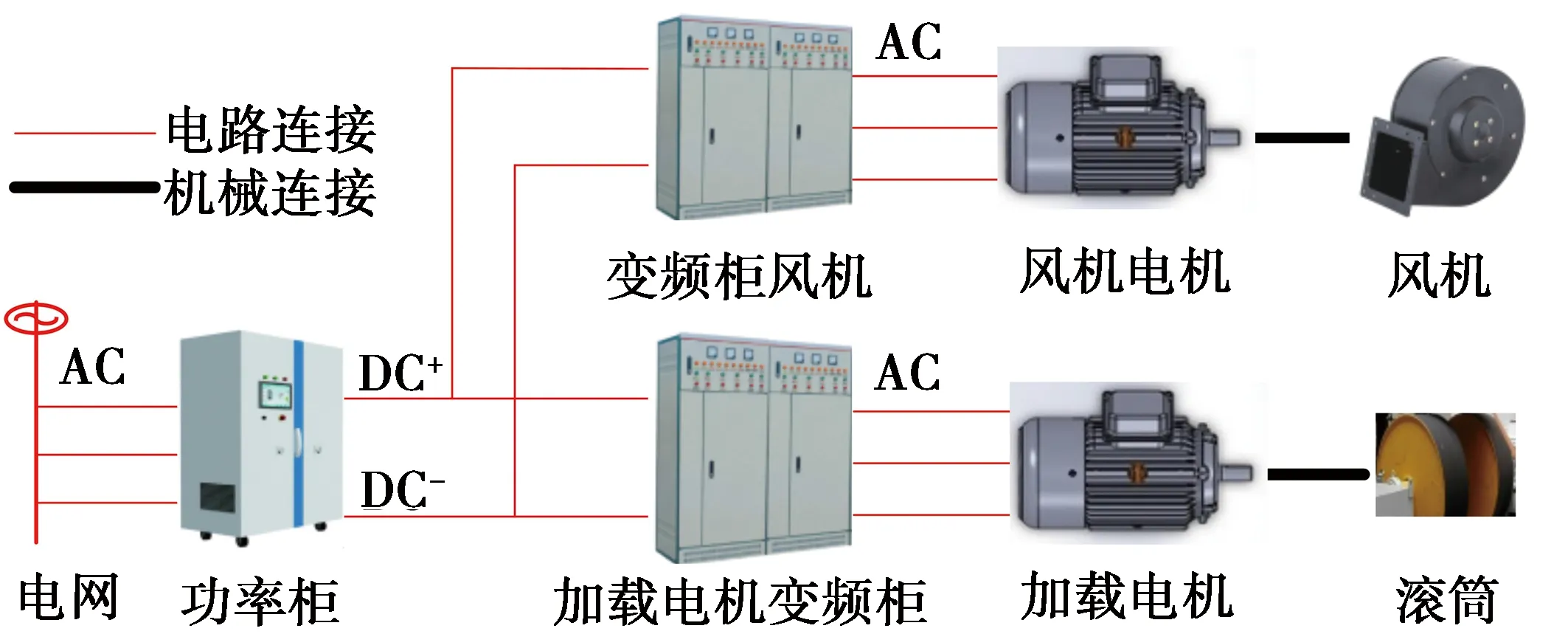
圖3 測(cè)功機(jī)及電氣子系統(tǒng)
功率柜主要功能是整流、逆變,將交流變成直流,為變頻柜供電,為整個(gè)系統(tǒng)提供所需的直流電源,同時(shí)在測(cè)功模式下將機(jī)械能轉(zhuǎn)化為電能,將能量回饋電網(wǎng),以達(dá)到節(jié)能的目的。變頻柜主要用于驅(qū)動(dòng)加載電機(jī)根據(jù)選擇的控制模式精確調(diào)節(jié)測(cè)功機(jī)的轉(zhuǎn)速、轉(zhuǎn)矩,滿足試驗(yàn)要求,驅(qū)動(dòng)變頻風(fēng)機(jī)跟蹤車輛速度。
加載電機(jī)于發(fā)電機(jī)模式(測(cè)功模式)工作時(shí),可利用其優(yōu)良的低速轉(zhuǎn)矩特性,模擬車輛穩(wěn)態(tài)阻力和加速阻力;于電動(dòng)機(jī)模式(驅(qū)動(dòng)模式)工作時(shí),可對(duì)車輛進(jìn)行反拖,用于測(cè)量車輛傳動(dòng)阻力及制動(dòng)器制動(dòng)力等。變頻風(fēng)機(jī)通過(guò)對(duì)車輛行駛散熱氣流的模擬,實(shí)現(xiàn)風(fēng)速自動(dòng)跟隨車速,對(duì)車輛發(fā)動(dòng)機(jī)進(jìn)行冷卻。滾筒用于保證車輛的驅(qū)動(dòng)輪與滾筒表面有足夠的附著力,使車輛驅(qū)動(dòng)橋輸出的功率傳遞給測(cè)功機(jī)。
對(duì)電網(wǎng)側(cè)的交流(alternating current, AC)-直流(direct current, DC)轉(zhuǎn)換,采用脈沖寬度調(diào)制(pulse width modulation,PWM)技術(shù)可以實(shí)現(xiàn)高功率因數(shù)、能量雙向流動(dòng)和穩(wěn)定可調(diào)的直流輸出電壓。對(duì)電機(jī)側(cè)的DC-AC測(cè)功單元采用加載電機(jī)的直接轉(zhuǎn)矩控制策略,可以保證底盤測(cè)功機(jī)的優(yōu)良動(dòng)態(tài)性能。
2.1.3 測(cè)控子系統(tǒng)
測(cè)控子系統(tǒng)實(shí)時(shí)采集測(cè)功機(jī)的各類傳感器信號(hào),結(jié)合虛擬環(huán)境子系統(tǒng)提供的環(huán)境信息,經(jīng)測(cè)控計(jì)算機(jī)得到加載力數(shù)學(xué)模型,控制加載電機(jī)對(duì)試驗(yàn)車輛進(jìn)行動(dòng)態(tài)加載,實(shí)現(xiàn)道路載荷模擬,并管理試驗(yàn)數(shù)據(jù)及流程,確保試驗(yàn)順利進(jìn)行。測(cè)控子系統(tǒng)主要由傳感器、數(shù)據(jù)采集卡、測(cè)控計(jì)算機(jī)及試驗(yàn)管理計(jì)算機(jī)組成,如圖4所示。

圖4 測(cè)控子系統(tǒng)
傳感器主要包括安裝在底盤測(cè)功機(jī)及試驗(yàn)車輛上的傳感器。安裝在底盤測(cè)功機(jī)上的傳感器包括電網(wǎng)側(cè)、電機(jī)側(cè)電壓電流傳感器,加載電機(jī)三相繞組及軸承處的溫度傳感器,加載電機(jī)輸出軸的轉(zhuǎn)矩傳感器、滾筒處的轉(zhuǎn)速傳感器及油耗儀、尾氣分析儀等。安裝在試驗(yàn)車輛上的傳感器包括加速踏板、制動(dòng)踏板、離合器踏板處的位置傳感器及發(fā)動(dòng)機(jī)轉(zhuǎn)速傳感器、油溫傳感器等相關(guān)傳感器。信號(hào)調(diào)理單元將傳感器信號(hào)進(jìn)行處理,分別將轉(zhuǎn)矩(應(yīng)變片輸入)、轉(zhuǎn)速(計(jì)數(shù)器輸入)、壓力(電壓輸入)、溫度(熱電偶輸入)、電流變送器(電壓輸入)等信號(hào)轉(zhuǎn)換成數(shù)據(jù)采集卡可識(shí)別的標(biāo)準(zhǔn)信號(hào),同時(shí)起到電氣信號(hào)隔離作用,數(shù)據(jù)采集卡將標(biāo)準(zhǔn)信號(hào)傳輸給測(cè)控計(jì)算機(jī)。
測(cè)控計(jì)算機(jī)根據(jù)試驗(yàn)車輛當(dāng)前的運(yùn)動(dòng)參數(shù),結(jié)合虛擬環(huán)境子系統(tǒng)發(fā)布的環(huán)境信息(道路滾動(dòng)阻力因數(shù)、坡度角、空氣阻力因數(shù)、試驗(yàn)車輛迎風(fēng)面積、風(fēng)速),得到加載阻力的數(shù)學(xué)模型,控制加載電機(jī)對(duì)試驗(yàn)車輛進(jìn)行動(dòng)態(tài)加載,實(shí)現(xiàn)道路載荷模擬。
試驗(yàn)管理計(jì)算機(jī)與測(cè)控計(jì)算機(jī)通過(guò)以太網(wǎng)進(jìn)行數(shù)據(jù)傳輸及交互,通過(guò)人機(jī)交互界面對(duì)整個(gè)試驗(yàn)數(shù)據(jù)及流程進(jìn)行監(jiān)控管理,確保試驗(yàn)安全順利進(jìn)行,并通過(guò)車速、驅(qū)動(dòng)輪輸出轉(zhuǎn)矩、燃油消耗量、尾氣排放情況及發(fā)動(dòng)機(jī)相關(guān)參數(shù)等車輛信息對(duì)試驗(yàn)車輛的動(dòng)力性、經(jīng)濟(jì)性、排放性進(jìn)行評(píng)價(jià),通過(guò)擋位的選取、加速踏板、離合器踏板、制動(dòng)踏板的行程等駕駛員操作信息對(duì)駕駛水平及環(huán)境進(jìn)行評(píng)價(jià)。
2.2 測(cè)功機(jī)系統(tǒng)關(guān)鍵技術(shù)實(shí)現(xiàn)
2.2.1 基于Prescan的虛擬環(huán)境系統(tǒng)構(gòu)建
選擇Prescan作為虛擬環(huán)境開發(fā)工具。Prescan軟件是一款集成度較高的軟件,被廣泛應(yīng)用于虛擬現(xiàn)實(shí)系統(tǒng)和智能駕駛輔助系統(tǒng)的開發(fā)中[17-18]。道路環(huán)境建模利用Prescan中的道路設(shè)計(jì)模塊直接創(chuàng)建,該模塊包含直路、坡路和十字路等,可根據(jù)需求進(jìn)行不同的組合,并設(shè)置道路參數(shù)。交通環(huán)境建模主要包括虛擬車輛初始位置、行駛路徑、初始車速、行駛距離和加速度等車輛參數(shù)的設(shè)置,虛擬車輛會(huì)按照設(shè)計(jì)的情況進(jìn)行自動(dòng)行駛。氣象環(huán)境建模主要包括晴天或雨天、太陽(yáng)的明亮程度、是否雪天、霧天等,當(dāng)雨天或者地面有積雪時(shí),道路滾動(dòng)阻力因數(shù)會(huì)發(fā)生改變。由于底盤測(cè)功機(jī)試驗(yàn)時(shí),本車的各種聲音都是真實(shí)的,只需建立車輛外部的聲音模型即可。實(shí)際試驗(yàn)車輛模型通過(guò)速度傳感器得到試驗(yàn)車輛的速度,實(shí)現(xiàn)試驗(yàn)車輛與虛擬環(huán)境的交互。
完成道路環(huán)境、交通環(huán)境、氣象環(huán)境、聲音及試驗(yàn)車輛建模后,在模型中通過(guò)數(shù)據(jù)分發(fā)服務(wù)(data distribution service,DDS)技術(shù)發(fā)布環(huán)境參數(shù),為測(cè)控子系統(tǒng)得到實(shí)時(shí)加載阻力模型,并訂閱車速傳感器參數(shù),得到試驗(yàn)車輛的車速以實(shí)現(xiàn)試驗(yàn)車輛與虛擬環(huán)境的交互。
2.2.2 基于Links-RT的快速原型控制
測(cè)控系統(tǒng)采用的快速原型控制器Links-RT如圖5所示。測(cè)控計(jì)算機(jī)借助Simulink的開發(fā)環(huán)境,根據(jù)虛擬環(huán)境系統(tǒng)提供的環(huán)境信息,同時(shí)基于獲得的試驗(yàn)車輛性能信息,制定加載力的控制策略,利用RT-Coder完成對(duì)底層驅(qū)動(dòng)的配置,從而一鍵生成可以用于Links-RT的C代碼。RT-Sim實(shí)時(shí)顯示Links-RT傳到測(cè)控計(jì)算機(jī)的數(shù)據(jù),計(jì)算模擬輸出阻力,并可以進(jìn)行在線修改,根據(jù)不同試驗(yàn)選擇不同的控制方法,試驗(yàn)的速度點(diǎn)可以任意設(shè)置,具有開放式的道路循環(huán)編輯功能,可自定義任何工況曲線,以利于科研和車輛新產(chǎn)品的驗(yàn)證性試驗(yàn),具備廣泛的開放性和靈活性。
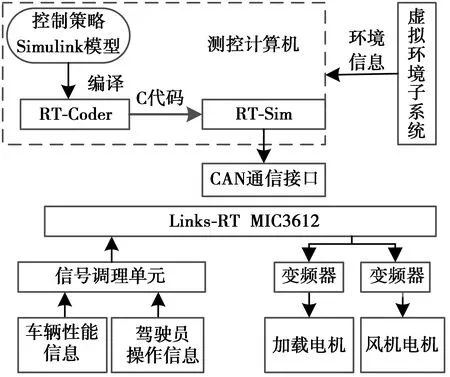
圖5 基于Links-RT的底盤測(cè)功機(jī)控制子系統(tǒng)
Links-RT搭載的MIC3612芯片,支持RTS/CTS數(shù)據(jù)流控制功能,通過(guò)獲取車輛性能信息和駕駛員操作信息,并根據(jù)測(cè)控計(jì)算機(jī)的控制策略,控制測(cè)功機(jī)及電器系統(tǒng)中的變頻器,進(jìn)而控制加載電機(jī)實(shí)時(shí)動(dòng)態(tài)加載,控制變頻風(fēng)機(jī)對(duì)車速的跟蹤,測(cè)控計(jì)算機(jī)通過(guò)控制器局域網(wǎng)(controller area network,CAN)通信接口與Links-RT進(jìn)行連接與數(shù)據(jù)交換,以實(shí)現(xiàn)底盤測(cè)功機(jī)系統(tǒng)的數(shù)字化控制。
2.2.3 基于DDS的試驗(yàn)平臺(tái)
DDS是一套應(yīng)用程序接口(application programming interface,API)與互操作性協(xié)議規(guī)范,具備應(yīng)用程序所需的發(fā)布和訂閱數(shù)據(jù)的功能,負(fù)責(zé)高效地將數(shù)據(jù)發(fā)送到適當(dāng)?shù)慕邮照遊19-20]。根據(jù)試驗(yàn)系統(tǒng)對(duì)數(shù)據(jù)傳輸?shù)囊螅⒘嘶贒DS的底盤測(cè)功機(jī)試驗(yàn)系統(tǒng)平臺(tái)。試驗(yàn)系統(tǒng)平臺(tái)包括測(cè)控計(jì)算機(jī)、虛擬環(huán)境計(jì)算機(jī)和試驗(yàn)管理計(jì)算機(jī),各個(gè)計(jì)算機(jī)各自運(yùn)行相關(guān)軟件,3臺(tái)計(jì)算機(jī)之間通過(guò)以太網(wǎng)基于DDS實(shí)現(xiàn)各個(gè)域成員間信息的快速傳遞,建立集數(shù)據(jù)管理、流程管理、監(jiān)控服務(wù)、試驗(yàn)結(jié)果評(píng)價(jià)于一體的試驗(yàn)平臺(tái)。根據(jù)前文對(duì)試驗(yàn)系統(tǒng)的工作過(guò)程及原理分析,為確保試驗(yàn)順利進(jìn)行,各個(gè)域成員發(fā)布/訂閱的數(shù)據(jù)如表1所示。

表1 域成員發(fā)布/訂閱數(shù)據(jù)表
根據(jù)DDS工作原理,各個(gè)域成員間能夠互相通信,形成邏輯網(wǎng)絡(luò),創(chuàng)建發(fā)布者、訂閱者等域參與者,注冊(cè)不同數(shù)據(jù)類型,進(jìn)行相關(guān)主題定義,通過(guò)主題來(lái)關(guān)聯(lián)發(fā)布信息,域成員可以定制自己的服務(wù)質(zhì)量策略,最后進(jìn)行DDS的接口封裝,通過(guò)發(fā)布/訂閱接口加入全局?jǐn)?shù)據(jù)空間,與其他域成員交互信息,以實(shí)現(xiàn)數(shù)據(jù)的高效實(shí)時(shí)傳輸。
3 試驗(yàn)驗(yàn)證
設(shè)計(jì)的基于虛擬環(huán)境的交流底盤測(cè)功機(jī)系統(tǒng)已投入實(shí)際使用,為了驗(yàn)證試驗(yàn)系統(tǒng)性能,以五菱宏光為試驗(yàn)用車在底盤測(cè)功機(jī)上進(jìn)行試驗(yàn),其實(shí)物場(chǎng)景如圖6所示。圖6中,①為測(cè)控計(jì)算機(jī),運(yùn)行Links-RT軟件、MATLAB/Simulink軟件,通過(guò)數(shù)據(jù)采集控制器采集傳感器、虛擬環(huán)境子系統(tǒng)的環(huán)境信息,輸出底盤測(cè)功機(jī)控制信號(hào);②為虛擬環(huán)境計(jì)算機(jī),運(yùn)行Prescan軟件,通過(guò)顯示輸出為駕駛員提供實(shí)車道路環(huán)境;③為試驗(yàn)管理計(jì)算機(jī),運(yùn)行數(shù)據(jù)庫(kù)軟件、LabVIEW軟件,實(shí)現(xiàn)對(duì)試驗(yàn)過(guò)程的流程管理及監(jiān)控,3臺(tái)計(jì)算機(jī)通過(guò)以太網(wǎng)基于DDS實(shí)現(xiàn)各個(gè)域成員間信息的快速傳遞;④為快速原型控制器Links-RT,實(shí)時(shí)采集傳感器信息傳遞給測(cè)控計(jì)算機(jī),并根據(jù)測(cè)功計(jì)算機(jī)的加載控制算法實(shí)時(shí)控制,對(duì)車輛進(jìn)行動(dòng)態(tài)加載;⑤為底盤測(cè)功機(jī)。

圖6 虛擬環(huán)境底盤測(cè)功機(jī)試驗(yàn)系統(tǒng)
虛擬環(huán)境交流底盤測(cè)功機(jī)系統(tǒng)能夠模擬不同的實(shí)車環(huán)境,試驗(yàn)以新歐洲駕駛周期(new European driving cycle,NEDC)工況給定車輛的目標(biāo)車速,在平直路面和5%的上坡路面上分別進(jìn)行試驗(yàn),記錄循環(huán)工況下在兩種路面的車輛速度、加速踏板、制動(dòng)踏板及變速器擋位的情況,試驗(yàn)結(jié)果如圖7所示,圖7b中,縱軸正、負(fù)坐標(biāo)分別表示車輛加速踏板開度、制動(dòng)踏板開度。由圖7a可知:駕駛員駕駛車輛可以較好地跟隨目標(biāo)車速,上坡路面的速度跟隨情況差于在水平路面上。由圖7b和圖7c可知:在相同速度下,不同路面行駛環(huán)境需要的加速踏板和制動(dòng)踏板開度不同,對(duì)變速器擋位的控制也有較大的影響,上坡路面對(duì)應(yīng)的加速踏板開度更大,并處于更低擋位,此結(jié)果與實(shí)際情況一致。

(a) 車輛速度變化
為了進(jìn)一步驗(yàn)證試驗(yàn)系統(tǒng)模擬室外道路試驗(yàn)的可行性,試驗(yàn)車輛在室外真實(shí)道路上進(jìn)行了NEDC工況試驗(yàn),并與室內(nèi)底盤測(cè)功機(jī)試驗(yàn)結(jié)果對(duì)比,對(duì)比結(jié)果如圖8所示。由圖8可知:給定工況時(shí),室內(nèi)與室外道路試驗(yàn)的車速跟隨、加速踏板、制動(dòng)踏板及變速器擋位的變化情況較為接近。由于存在不同道路負(fù)載的影響以及信號(hào)反饋時(shí)滯等難以控制的因素,為了抵消室內(nèi)試驗(yàn)硬件帶來(lái)的摩擦阻力以及考慮系統(tǒng)需要消耗的動(dòng)力,為保持室內(nèi)底盤測(cè)功機(jī)試驗(yàn)循環(huán)工況的速度跟隨,需要更大的油門或制動(dòng)踏板開度。室外試驗(yàn)和室內(nèi)試驗(yàn)數(shù)據(jù)變化趨勢(shì)吻合,一致性良好,速度誤差在1 km/h內(nèi)。

(a) 車輛速度變化
4 結(jié)束語(yǔ)
在底盤測(cè)功機(jī)的基礎(chǔ)上,通過(guò)分析試驗(yàn)系統(tǒng)的功能及技術(shù)需求,構(gòu)建了虛擬環(huán)境交流底盤測(cè)功機(jī)試驗(yàn)系統(tǒng),主要設(shè)計(jì)了虛擬環(huán)境子系統(tǒng)、測(cè)功機(jī)及電氣子系統(tǒng)和測(cè)控子系統(tǒng),并對(duì)其結(jié)構(gòu)原理進(jìn)行了分析。通過(guò)對(duì)虛擬現(xiàn)實(shí)、動(dòng)態(tài)加載控制和試驗(yàn)系統(tǒng)平臺(tái)等關(guān)鍵技術(shù)的分析,基于Prescan軟件建立了虛擬環(huán)境模型,利用Links-RT實(shí)現(xiàn)了對(duì)試驗(yàn)車輛的動(dòng)態(tài)加載,基于DDS平臺(tái)實(shí)現(xiàn)了計(jì)算機(jī)網(wǎng)絡(luò)實(shí)時(shí)通信,從而開發(fā)了虛擬環(huán)境交流底盤測(cè)功機(jī)試驗(yàn)系統(tǒng)。室內(nèi)底盤測(cè)功機(jī)試驗(yàn)和室外道路試驗(yàn)速度誤差在1 km/h內(nèi),且試驗(yàn)結(jié)果變化趨勢(shì)一致,數(shù)據(jù)吻合。虛擬環(huán)境底盤測(cè)功機(jī)試驗(yàn)系統(tǒng)為更能接近實(shí)車道路試驗(yàn)結(jié)果提供了可能。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
小學(xué)科學(xué)(學(xué)生版)(2021年7期)2021-07-28 06:44:42
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
趣味(數(shù)學(xué))(2020年9期)2020-06-09 05:35:08
科技傳播(2019年22期)2020-01-14 03:06:34
科技傳播(2019年22期)2020-01-14 03:06:30
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
消費(fèi)導(dǎo)刊(2017年20期)2018-01-03 06:26:40