航速對潛艇操縱性影響分析
2022-01-22 10:41:38彭立程胡坤羅向前
中國科技縱橫 2021年23期
關鍵詞:深度
彭立程 胡坤 羅向前
(中國人民解放軍海軍潛艇學院,山東青島 266199)
潛艇航速大小及變化速度對潛艇水下操縱有不同程度的影響。特別是當潛艇面臨舵卡、艙室進水等緊急情況時,及時改變潛艇航速對于挽回潛艇掉深具有不可替代作用。本文根據潛艇水下運動坐標系和符號規則,利用潛艇垂直面操縱運動方程及模型潛艇參數建立潛艇水下運動模型,采用Qt creator編程,對潛艇水下舵卡、艙室進水兩種緊急情況進行仿真,并利用Matlab對仿真結果進行畫圖分析,制定了高速航行尾舵卡下潛舵與微速航行艙室進水2種危險情況的航速使用方案。
1.潛艇運動模型
1.1 潛艇垂直面運動模型
本文采用國際水池會議(ITTC)推薦的和造船與輪機工程學會(SNAME)術語公報的體系確立坐標系和符號規則[1],如圖1所示。
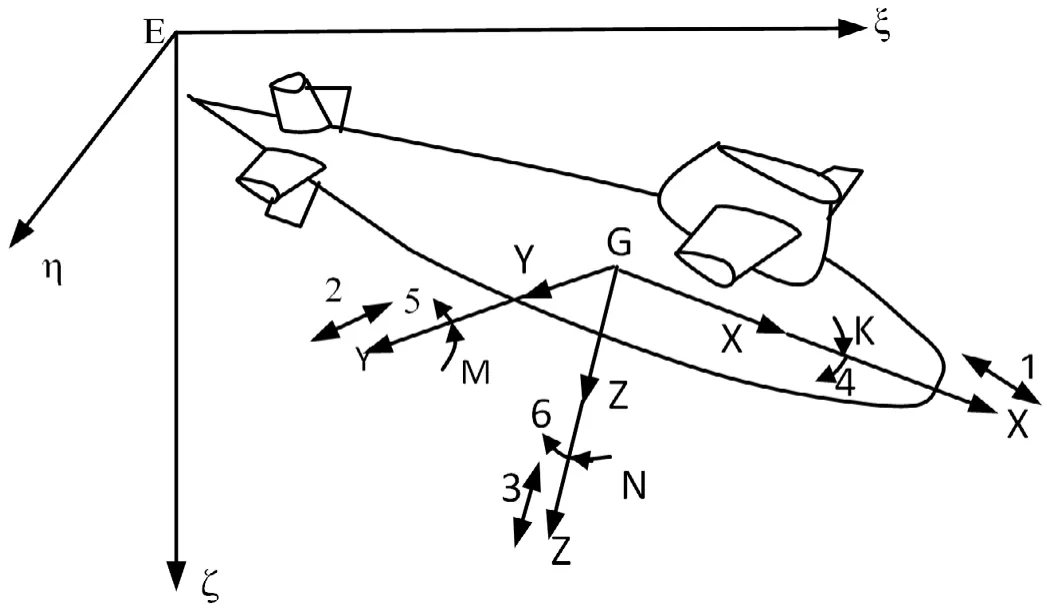
圖1 坐標系與符號規則
坐標系采用2種右手坐標系:一是固定坐標系E-ξηζ(簡稱“定系”),固定于地球;另一個是運動坐標系G-xyz(簡稱“動系”),隨艇一起運動,各坐標軸均按右手系確定。
潛艇在水下航行時,除了火災以外,最大的安全隱患來自舵卡和艙室進水兩方面[2]。操艇人員應適當的措施,如增速、停車減速、倒車和吹除潛艇主壓載水艙等措施挽回潛艇[3]。本文重點對潛艇進行大舵角與中、高速等強機動工況進行研究,因此采用垂直面操縱運動非線性方程式[4]:
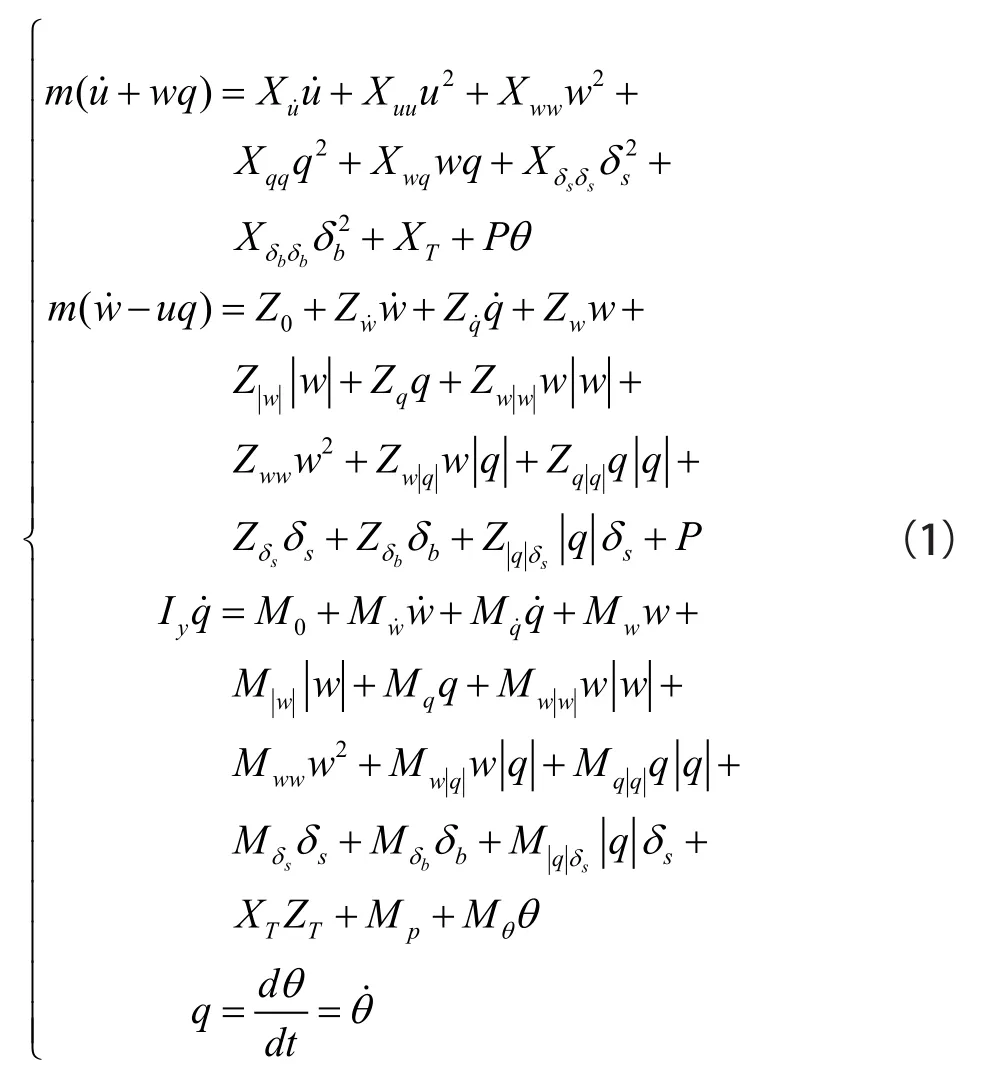
式中:m為水下全排水量的潛艇質量;u、w為潛艇沿坐標軸Gx、Gz的運動速度;、為潛艇沿坐標軸Gx、Gz的運動加速度;p、q為潛艇繞坐標軸Gx、Gy的旋轉角速度;、為潛艇繞坐標軸Gx、Gy的旋轉角加速度;X、Z為潛艇沿著坐標軸Gx、Gz的力;M為潛艇沿著坐標軸Gy的力矩;Iy為潛艇對坐標軸Gy的轉動慣量;θ為潛艇的縱傾角;δb、δs為首、尾升降舵舵角;P為潛艇所受重力。
1.2 潛艇艙室進水模型
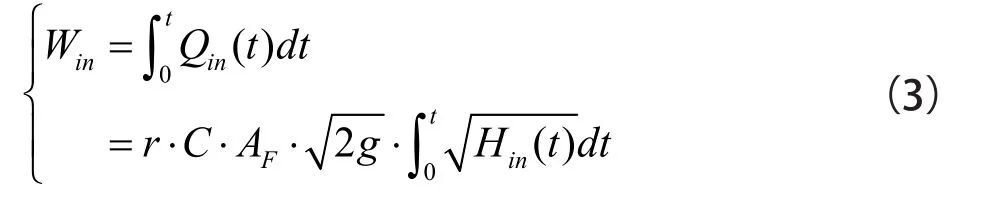
根據文獻[5],潛艇艙室破損進水時,其進水流量為:

式中:AF為破口面積(m2);r為海水比重(取1025 kg/m3);C為水流經破口時的收縮系數;Hin為破口處艙內外壓頭差(m);g為重力加速度(9.8m/s2)。
對Qin積分,得到破損艙室進水量:
設潛艇破損艙距潛艇重心的位置為(x0,z0),則壓頭差Hin的表達式:
式中:p0為艙室的初始氣壓(取一個標準大氣壓);V0為艙室的初始氣體容積(m3);A為艙室平均底面積;H為艙室高度。
則潛艇的損失浮力:

假設潛艇破損引起的損失浮力ΔP作用于Gi(xGi,yGi,zGi),由于其方向總是鉛垂,所以在定系中其分量為{0,0,ΔP},經定系到動系的坐標轉換,ΔP的分量在動系的表達式為:
ΔP對動系原點的力矩為:
2.航速對潛艇水下操縱運動影響分析
2.1 潛艇航速劃分及特點
潛艇航行過程中,倒車工況大多使用于緊急情況,進車工況大致分為微速區、低速區、中速區和高速區。各速區特點如下:
微速區大多采用主電機經航工作制。由于航速較低,消耗電量較小,較為省電,能有效延長潛艇水下待機時間;螺旋槳轉速低,噪音較小,可以有效提高潛艇隱蔽性,適用于潛艇長時間隱蔽航行。
低速區潛艇具有較好的操縱性,在適當航速下可以較為準確計算潛艇浮力差與力矩差,適用于潛艇下潛后行進間均衡以及日常訓練操作。
中速區潛艇具有較高航速與機動性,適用于潛艇水面較長距離航渡與水下較大強度的機動。
高速區潛艇航速高,主電機耗電量大,螺旋槳噪音高,潛艇聽測能力受限,適用于潛艇緊急規避攻擊、動力抗沉或短時間長距離機動。
2.2 潛艇航速對操舵的影響
潛艇水下航行過程中,通常情況下,用首舵控制深度,尾舵控制縱傾,首、尾舵的作用效果隨航速而變,中、高速主要用尾舵;微速、低速主要用首舵。采用1.1中坐標系與公式以及模型潛艇參數進行編程,仿真條件:潛艇初始深度200m,分別在微速、低速、中速、高速條件下,首舵操下潛滿舵,其深度變化曲線如圖2所示;潛艇初始深度200m,分別在微速、低速、中速、高速條件下,尾舵操下潛10°,其深度變化曲線如圖3所示。
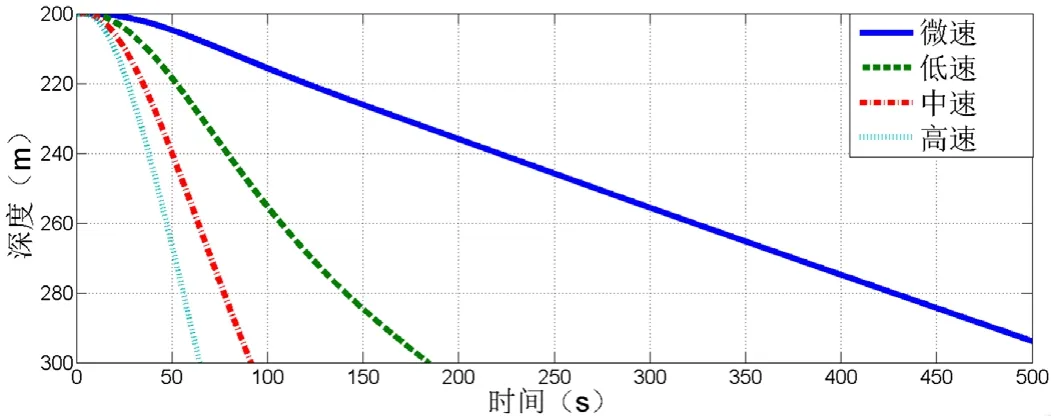
圖2 不同航速首舵下潛滿舵深度變化圖
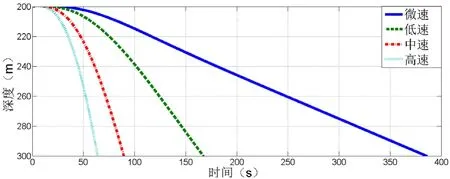
圖3 不同航速尾舵下潛10°深度變化圖
由圖2、圖3可知,潛艇首、尾舵操下潛舵一定舵角時,潛艇深度變化隨航速增大而增大,并且在中、高航速時,潛艇在50s~100s便可達到300m深度,由此可以得到,中、高速區遭遇舵卡情況時,尾舵卡對潛艇安全威脅最大,留給潛艇指揮員的處置時間非常短,需要迅速做出決策。
2.3 潛艇航速對均衡的影響
潛艇水下航行過程中,需要及時采用注(排)水與首尾調水的方式均衡潛艇。一般來講,微、低速航行時靜力起主要作用;中、高速航行時水動力起主要作用。當潛艇由高速轉換到低速時往往艇重,特別是微速航行,需要及時補充均衡。
潛艇水下遭遇艙室進水情況時,由于水泵排水速度有限,大多情況下無法抵消艙室進水對潛艇造成的影響,特別是首部艙室進水對潛艇安全航行影響更大。采用公式(2)~(7)建立艙室進水模型,仿真條件:潛艇初始深度200m,一艙破損面積0.05m2,進水60t后堵漏成功,分別在微速、低速、中速、高速保持不變的情況下,采用操相對上浮舵并進行應急吹除中組挽回,其深度變化曲線如圖4所示。
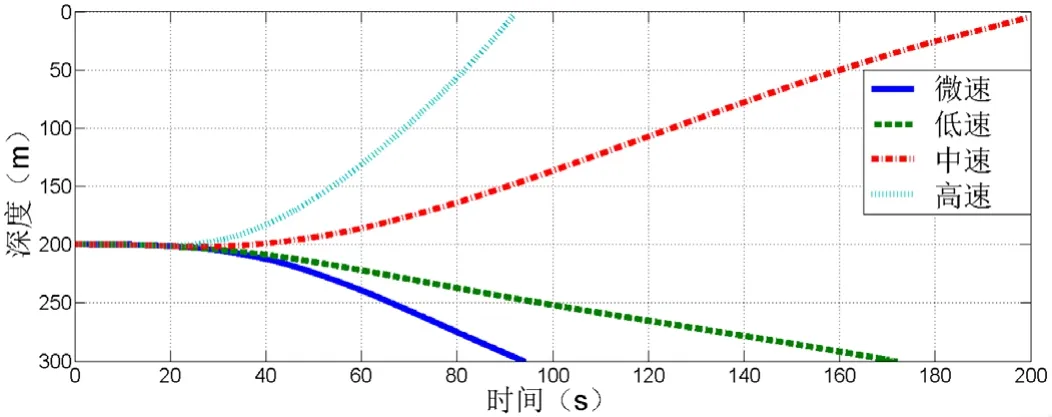
圖4 不同航速下挽回一艙破損深度變化圖
由圖4可知,在微速與低速情況下,潛艇僅利用操舵與高壓氣吹除方式無法挽回潛艇深度;在中速與高速情況下,由于舵效較高,可以有效挽回潛艇深度,且航速越高挽回越迅速。
3.舵卡與艙室進水情況下潛艇航速使用方案
由2.2、2.3可知,潛艇中、高速航行過程中,尾舵卡下潛舵較大舵角對潛艇航行安全影響較大;潛艇微、低速航行過程中,艙室進水對潛艇航行安全影響較大。
3.1 高速航行尾舵卡下潛舵航速使用方案
潛艇高速航行時,由于水動力起主要作用,當尾舵卡下潛舵較大舵角時,會迅速導致潛艇首傾與深度增大,需立即降速,并采用首舵操上浮滿舵、高壓氣應急吹除、均衡等措施挽回。舵卡仿真過程中,只需將舵角設定為某一值即可。仿真條件:潛艇初始深度200m,高速航行尾舵卡下潛舵20°,分別采用立即停車+吹除首組、立即停車+吹除中組、立即倒車+吹除首組、立即倒車+吹除中組,同時首舵操上浮滿舵進行挽回,其深度變化如圖5所示。
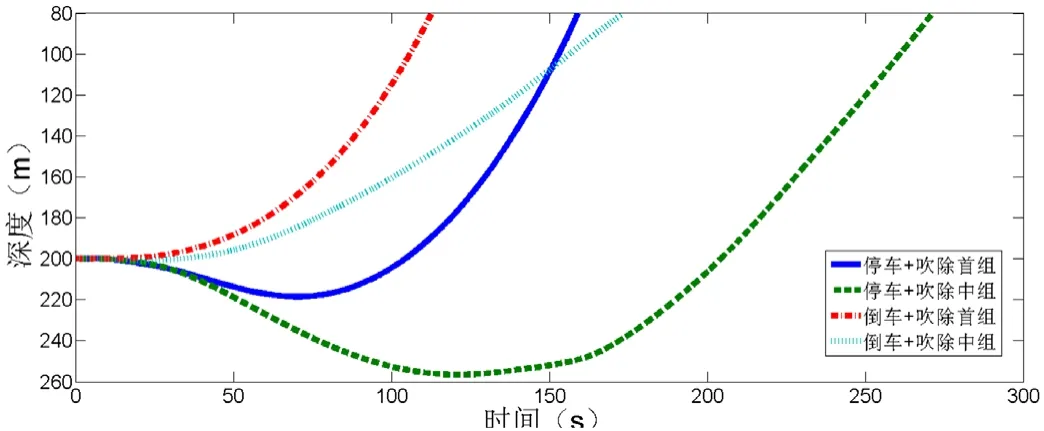
圖5 高速挽回尾舵卡深度變化圖
由圖5可知,潛艇高速航行發生尾舵卡時,采用上述4種方案均可有效挽回潛艇掉深,且采用立即倒車+吹除首組方案挽回效果最好。
3.2 微速航行遭遇艙室進水航速使用方案
潛艇微速航行時,由于靜力起主要作用,當遭遇艙室進水時,容易造成下潛慣性,若破損位置靠近艇首,還容易造成首傾慣性,需立即增速,并結合操相對上浮舵、高壓氣應急吹除等措施進行挽回。仿真條件:潛艇初始深度200m微速航行,一艙破損面積0.05m2,進水60t后堵漏成功,分別采用立即增速、延遲10s增速,同時操相對上浮舵進行挽回,其深度變化如圖6所示。
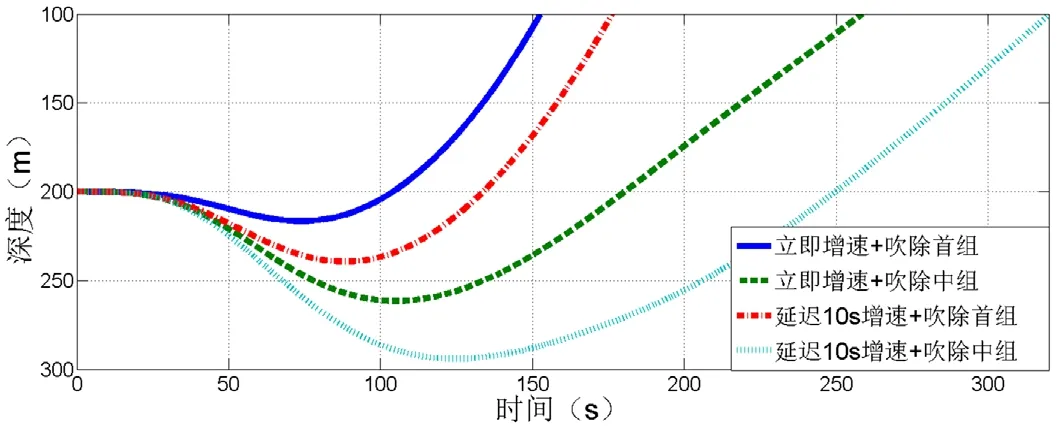
圖6 微速挽回艙室進水深度變化圖
由圖6可知,潛艇微速航行遭遇艙室進水時,采用上述四種方案均可有效挽回潛艇掉深,且采用立即增速+吹除首組方案挽回效果最好。
4.結語
本文通過分析影響航速變化快慢的原因、航速劃分及其特點、航速對操舵及均衡影響,得出以下結論:潛艇高速航行時尾舵卡下潛舵對潛艇航行安全影響較大;潛艇低速航行時艙室進水對潛艇航行安全影響較大。針對上述危險情況迅速改變航速是潛艇挽回掉深的關鍵,并制定了相應挽回方案。
猜你喜歡
中學生數理化·七年級數學人教版(2022年6期)2022-06-05 06:50:50
快樂學習報·教育周刊(2022年16期)2022-05-01 21:25:05
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年6期)2019-01-08 02:43:04
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
新聞傳播(2016年10期)2016-09-26 12:14:59
新聞傳播(2015年10期)2015-07-18 11:05:40
交通建設與管理(2015年15期)2015-03-20 15:18:57