全地形果園仿形彌霧機器人的設(shè)計
2022-01-25 03:28:36郭建康李彥沛李亞芹談桂秀蒲巖巖王超鵬
農(nóng)機使用與維修 2022年1期
郭建康,李彥沛,李亞芹,談桂秀,蒲巖巖,王超鵬
(1.佳木斯大學(xué) 機械工程學(xué)院,黑龍江 佳木斯 154000;2.佳木斯大學(xué) 現(xiàn)代教育技術(shù)中心,黑龍江 佳木斯 154000)
0 引言
針對果樹冠層厚、葉片密等特點,當下自動化果園中的主要做法是在自走式噴藥小車中加入超聲波傳感器并監(jiān)測當前對靶向是否有目標,當檢測到空擋時關(guān)停液泵以減少藥液浪費。本方案通過分析影響風(fēng)場分布和噴霧效果的各種因素,根據(jù)傳感器對于果樹的實時測繪取得的冠層厚度數(shù)據(jù),通過改變噴霧各種技術(shù)參數(shù)并監(jiān)測噴霧覆蓋和霧滴的漂移量以達到最佳作業(yè)效果。采用伸縮輪履可切換式行走結(jié)構(gòu),使彌霧機器人可適應(yīng)果園內(nèi)復(fù)雜的地形結(jié)構(gòu)。
1 數(shù)字波束形成技術(shù)
數(shù)字波束形成(DBF)技術(shù)是一種基于空間三維掃描的數(shù)字成像技術(shù),通過自適應(yīng)地發(fā)射波束可實現(xiàn)空域點云圖像采集,通過控制多個獨立可控波束的形成達到可控信噪比(圖1)。使用數(shù)字波束成像技術(shù)利用了波束特性可由矢量控制的特點,實現(xiàn)在作業(yè)中靈活可變的測繪模式切換目的。使用數(shù)字波束形成技術(shù)對果樹進行成像,可以有效探測并生成果樹的三維尺寸,為仿形彌霧作業(yè)提供數(shù)據(jù)支持。
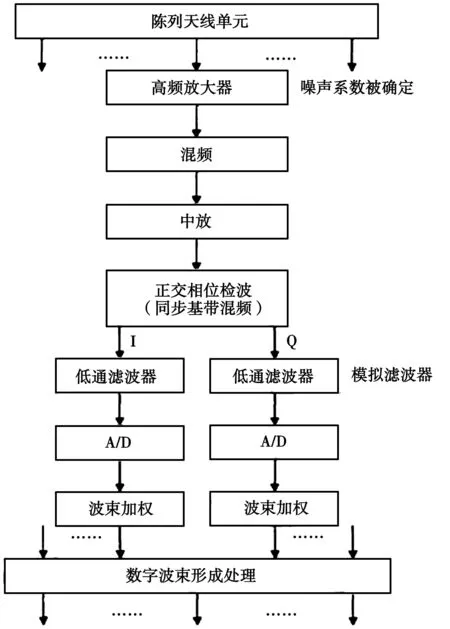
圖1 相控陣雷達接收信號進行波束處理
數(shù)據(jù)處理系統(tǒng)使用的是一塊高速信號處理板,包含8路10 bits的AD轉(zhuǎn)換器,一片F(xiàn)PGA,一塊10 bits的DA轉(zhuǎn)換芯片。在這個系統(tǒng)中,分別設(shè)計了軟件與硬件部分。在硬件方面,各通道在FPGA的控制下進行數(shù)據(jù)測量,完成對由SHA模擬中頻輸入接口送來的中頓信號進行模數(shù)轉(zhuǎn)換,形成8路數(shù)據(jù)流送入FPGA,在FPGA中完成數(shù)字正交解調(diào)、8路單波束DBP處理、脈沖壓縮處理,形成雙路的數(shù)字I/O信號,經(jīng)過求模,形成單路的數(shù)字視頻信號,送給DA芯片[1]。
在DBF體制雷達硬件結(jié)構(gòu)里(圖2),每個模塊含有一個陣列天線,天線的每個單元接收的射頻(RF)信號由集成在硬件中的A/D變換器分別進行模數(shù)轉(zhuǎn)換,由中央處理器將得到的數(shù)據(jù)進行變頻與同步檢波處理后放在內(nèi)存中,圖像運算單元對其進行正交基帶信號處理,處理后的復(fù)基帶數(shù)字信號S與預(yù)定的復(fù)加權(quán)矢量W再次交由圖像處理器進行相乘累加后,根據(jù)訓(xùn)練的圖像模型進行三維點云圖的輸出[2]。

圖2 簡化的面陣波束合成器
2 靜電彌霧
彌霧部分結(jié)構(gòu)由空氣壓縮機、柱塞泵、藥箱、控制電磁閥、靜電發(fā)生器、噴頭、風(fēng)機、機架等組成,風(fēng)量的確定遵循置換原則,原理為風(fēng)機吹出的氣流完全置換風(fēng)機前方到果樹空間的空氣,所述風(fēng)量應(yīng)大于其置換的空氣氣量,公式如下
Q>2vHLK
(1)
式中Q—末端送風(fēng)機的風(fēng)量,m3·h-1;
v—靜電彌霧機的行駛速度,m·s-1;
H—數(shù)字成像雷達所測定的果樹高度,m;
L—數(shù)字成像雷達所測定的距離果樹的點對點距離,m;
K—實驗室測定的空氣中氣流的衰減和沿途的氣流損失的系數(shù)。
在實際作業(yè)中,風(fēng)壓也是影響彌霧作業(yè)效果的重要因素(靜壓損失忽略不計),計算公式如下
Pd=ρ·v2/2
(2)
Pj=ζρ·v2/2
(3)
P=Pd+Pj
(4)
式中P—系統(tǒng)輸出的總壓,Pa;
Pd—系統(tǒng)內(nèi)部動壓損失,Pa;
Pj—體統(tǒng)局部動壓損失,Pa;
ρ—標準大氣密度,kg·m-3;
v—出口風(fēng)速,m·s-1;
ζ—局部阻力系數(shù);
靜電彌霧發(fā)生部分以蓄電池為電源,選用50~100 kV的高壓靜電為靜電系統(tǒng)工作電壓,為了防止因高壓靜電發(fā)生器出現(xiàn)不良情況,每個噴頭單獨配有一個高壓靜電發(fā)生器。靜電系統(tǒng)通過開關(guān)控制電磁閥和靜電發(fā)生器工作。噴霧作業(yè)時需閉合靜電發(fā)生器控制開關(guān)、中間噴霧控制開關(guān)和左或右噴霧控制開關(guān),從而實現(xiàn)分段、獨立噴霧,防止農(nóng)藥的浪費[3]。
3 流量控制
靜電彌霧系統(tǒng)的流量采用變量控制,流量控制系統(tǒng)應(yīng)用脈寬調(diào)制技術(shù),通過控制液泵的輸入功率改變噴灑管道壓力從而控制流量。同時,采用Abaqus有限元分析軟件對多旋翼植保無人機變量噴灑系統(tǒng)的關(guān)鍵受力部件進行線性靜力分析,確保流量控制系統(tǒng)結(jié)構(gòu)穩(wěn)定。
硬件方面采用STC15F104W單片機作為控制核心,通過控制液泵電機轉(zhuǎn)速實現(xiàn)控制噴灑流量。水泵使用無刷隔膜液泵,該系統(tǒng)由控制核心、液泵驅(qū)動電路及 UBEC這 3 部分組成。控制核心接收到接收機發(fā)出的控制信號后,將接收到的信號轉(zhuǎn)換為 PWM 信號發(fā)送至液泵驅(qū)動電路,最終控制液泵電機輸出功率,實現(xiàn)變量控制流量的功能。UBEC為無刷電機的電源控制電路,主要用于將鋰電池提供的高壓直流電源轉(zhuǎn)換為單片機和接收機可以使用的低壓直流電源[4]。系統(tǒng)框圖如圖3所示。
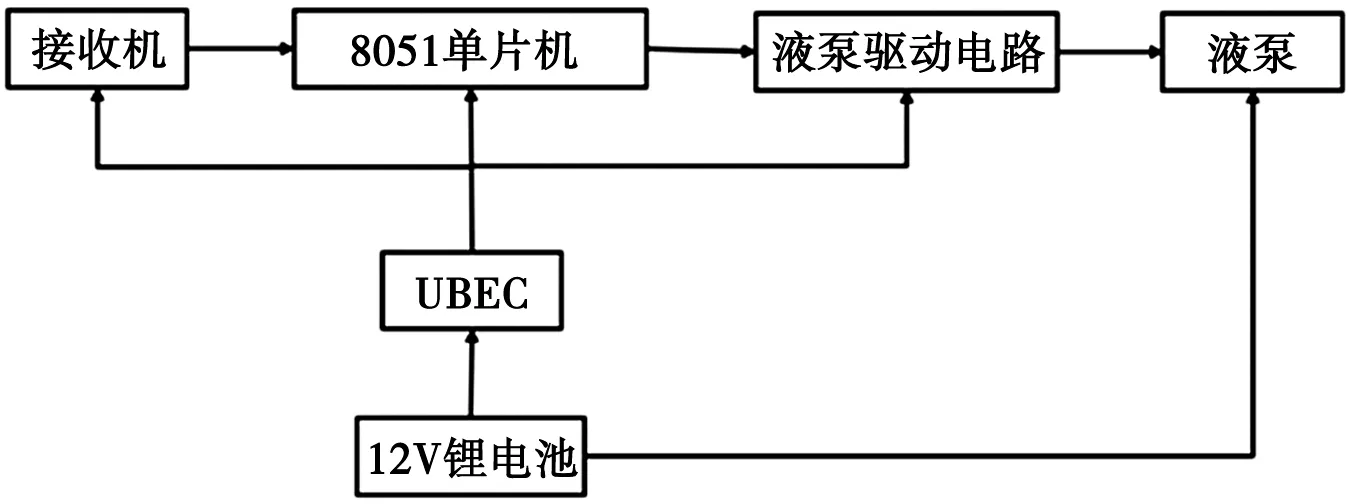
圖3 變量噴灑系統(tǒng)框圖
軟件方面,系統(tǒng)通過讀取上位機輸出的PWM信號并進行信號判斷,當輸入脈寬等于 1 ms 時,即控制端搖桿處于最低位時,變量噴灑控制系統(tǒng)開啟; 否則,系統(tǒng)將重新進入輸入信號判斷。
由電路原理知,在控制端油門大于10%時所輸出的電壓才足以使水泵啟動。因此,在變量控制系統(tǒng)開啟之后,當輸入脈寬大于1.1 ms(即控制端油門大于10%)時,根據(jù)輸入信號計算出對應(yīng)輸出PWM并循環(huán)該步驟;否則,重新進入輸入信號判斷步驟。
4 仿形風(fēng)送
通過數(shù)字波束形成技術(shù),實時采集果樹的三維深度信息,并對噴口的流量進行實時調(diào)整,達到仿形彌霧的效果。系統(tǒng)通過數(shù)字成像雷達進行點云成像,并根據(jù)點云圖擬合出果樹冠層圖像模型,根據(jù)模型進行取點測距。信號轉(zhuǎn)換電路將數(shù)字電路計算出的信號轉(zhuǎn)換為微控制器可識別的模擬信號,單片機對信號進行判斷與加權(quán)后根據(jù)實際情況打開或關(guān)閉電磁閥,調(diào)節(jié)水泵驅(qū)動信號,噴頭組件開始噴霧并根據(jù)深度信息實時調(diào)節(jié)流量。仿形彌霧系統(tǒng)解決了液滴漂移等復(fù)雜問題,實現(xiàn)了果園植保技術(shù)一體化革新。
5 可切換式輪履復(fù)合結(jié)構(gòu)
本機采用伸縮式輪履可切換式行走結(jié)構(gòu),使彌霧機器人可適應(yīng)果園內(nèi)復(fù)雜的地形結(jié)構(gòu)(圖4)。輪履復(fù)合結(jié)構(gòu)的切換由驅(qū)動液壓油缸實現(xiàn)。在機器人主體與輪式機構(gòu)的連接架兩側(cè)布置兩個液壓油缸,分別驅(qū)動伸縮式輪式行走機構(gòu)的收起離地和下放接地。經(jīng)計算,使用液壓油缸作為切換動力的液壓系統(tǒng)的工作壓力應(yīng)大于25 MPa。在平地行駛中輪式機構(gòu)工作下置時履帶最小離地高度達到越野車輛中等越野能力水平(≥185 mm), 液壓油缸與水平面夾角θ=17.5°。輪履切換系統(tǒng)既可以由操作者根據(jù)果園路面手動控制切換,也可以由果園仿形彌霧機器人根據(jù)視覺識別系統(tǒng)與壓力傳感器識別路面情況,傳至中央總控制模塊,由控制模塊輸出電平控制自行切換。
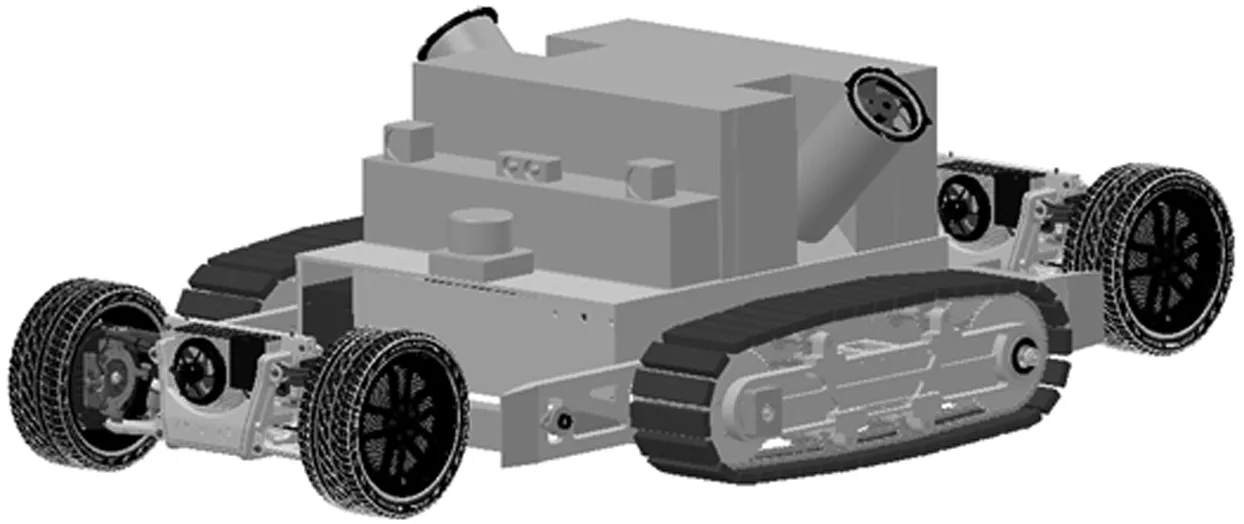
圖4 整車結(jié)構(gòu)示意圖
全車車輪部分選用大功率輪轂電機為驅(qū)動力。由于整機重量在藥液滿載時大于 60 kg故選擇了單個功率為0.5 kW的伺服輪轂電機如圖5所示。其額定電壓為24 V,電機最大橫向尺寸為 119.1 mm。動力電池組包括8個電池包,兩個一組并配有懸掛,布置于施藥機器人儲藥箱下方電池倉。
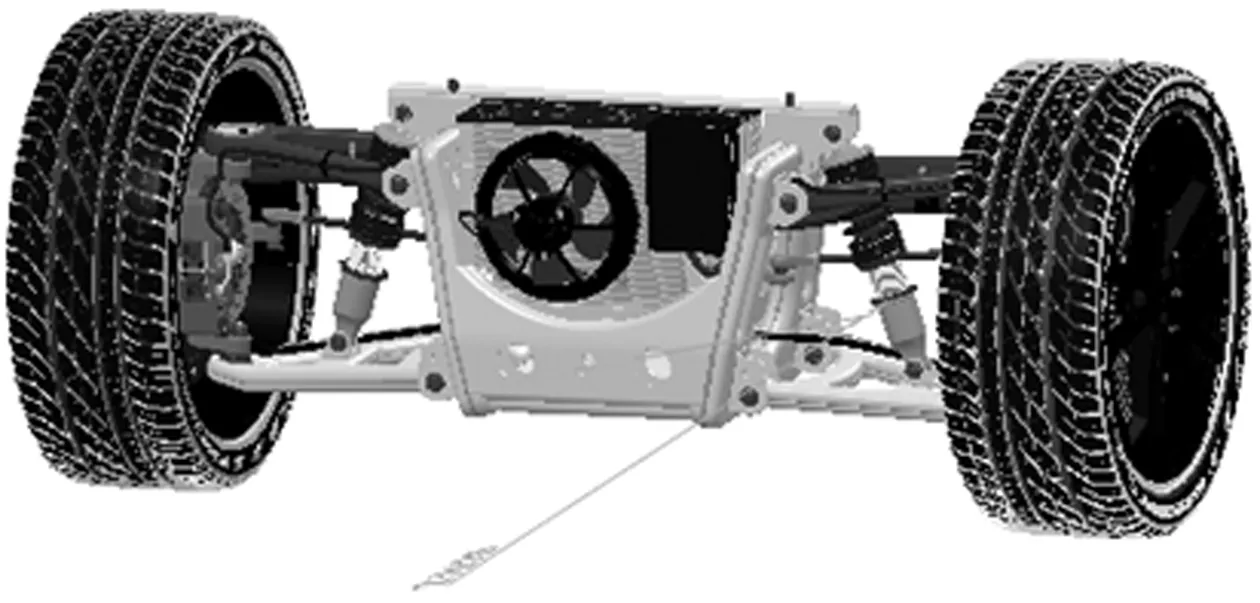
圖5 輪轂電機及懸架部分
6 結(jié)論
通過數(shù)字成像雷達獲取實時作業(yè)果樹的深度圖像信息,并根據(jù)當前行進速度調(diào)節(jié)藥液流量,所搭載的靜電彌霧系統(tǒng)將藥液霧化成100 μm左右的霧滴,通過靜電吸附防漂移實現(xiàn)分段、獨立彌霧的多種作業(yè)模式。仿形彌霧計算系統(tǒng)通過數(shù)字成像雷達獲得的果樹冠層厚度的深度信息,實時調(diào)節(jié)各噴嘴流量實現(xiàn)變量噴撒大大提升了作業(yè)效果,有效提升了霧滴的附著率,防止霧滴的飄移,實現(xiàn)了果園植保一體化革新,具有極強的推廣價值。
(03)
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25