一種鋼板磁吸液壓夾具運動學仿真分析
2022-02-08 10:12:16司馬明洋韓鳳國于寧濤
重型機械 2022年6期
司馬明洋,張 林,,滑 兵,韓鳳國,于寧濤
(1.山東交通學院工程機械學院,山東 濟南 250357;2.山東銘德機械有限公司,山東 濟寧 272000)
0 前言
鋼材是國家建設發展的重要物資,是實現國家現代化強國必不可少的戰略資源。中國鋼鐵產量如今已位居世界第一位,在國民經濟中占有很重要的地位。鋼板的使用在鋼材的生產中占有很大的比重,雷鵬等[1]對鋼材裝卸搬運的影響效率做了系統分析,鋼板的搬運轉移是一項繁重的工作,搬運方式一般采用電磁吸盤的方式。
雖然電磁吸盤是比較成熟的一種技術,但是電磁吸盤搬運鋼板需要消耗大量的電力資源,在工作過程中存在突然斷電現象會使鋼板脫落發生安全事故。如果將電磁吸盤結合液壓抓斗,使鋼板進一步固定,能提高設備的安全系數,預防鋼板脫落。目前,國內外對電磁吸盤與液壓抓斗的結合研究較少,所以兩者結合應用具有很大的研究價值。
許多學者對電磁吸盤和液壓抓斗的應用做了大量研究,張建國等[2]對電磁吸盤與液壓抓斗的應用做出了詳細的介紹,分析了電磁吸盤與液壓抓斗的優缺點。東玉祥等[3]結合液壓傳動與電磁吸盤設計了鋼坯碼垛機。丁云霞[4]等對雙瓣液壓抓斗進行了運動仿真分析。章愛武[5]對雙瓣、多瓣抓斗進行了仿真分析及優化研究。王寶劍[6]基于Pro/E對連桿壓套夾具進行建模、裝配和仿真,仿真結果為設計是否符合要求和改善夾具提供了依據。汪秀珍[7]通過Pro/E機構運動分析模塊對平面連桿機構進行運動分析教學,提高了對機構運動特性的感性認知。以上專家學者都是對電磁吸盤與液壓抓斗分別進行研究,本文根據鋼板磁吸液壓夾具的機構結構和連接特點,并結合鋼板磁吸液壓夾具的實際工作情況,對電磁吸盤與液壓抓斗相結合的運動進行相應的運動學分析與研究,驗證其機構模型的合理性。
1 鋼板磁吸液壓夾具結構
如圖1所示的鋼板磁吸液壓夾具,通過電磁吸盤吸附鋼板,然后通過兩邊液壓驅動抓斗進一步固定鋼板,可實現對鋼板的夾取。該夾具結構主要包括頂部液壓回轉裝置、底部電磁吸附裝置以及兩側液壓連桿裝置等。頂部液壓回轉裝置與快速連接頭固定連接,可適配各種工程機械設備,工作時可實現360°液壓旋轉,促使底部電磁吸附裝置實現各種角度吸附鋼板;電磁吸附裝置使用24 V電磁鐵,由工程機械電池直接供電,電磁吸附裝置兩側裝有推土板,可以將鋼板上的異物去除;兩側液壓連桿裝置為安全抓夾,用于保證現場作業安全。
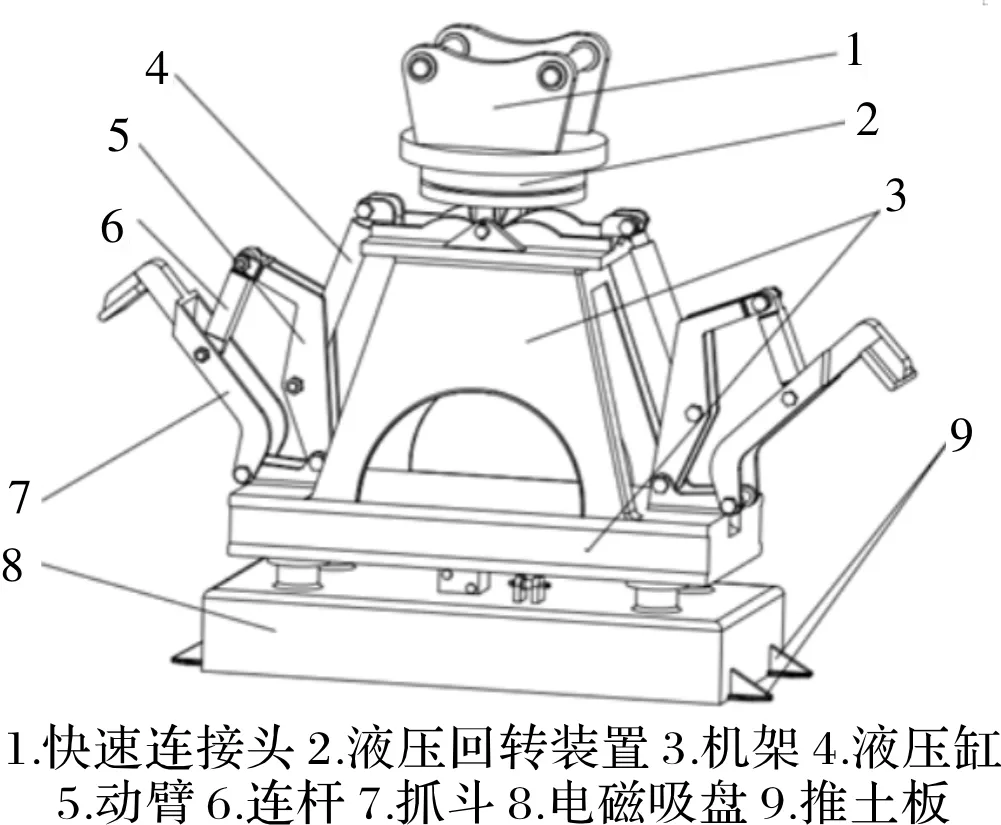
圖1 鋼板磁吸液壓夾具
兩側液壓連桿裝置的工作原理:液壓桿一端與機架上端鉸接,另一端與動臂中部鉸接;動臂底端與機架底端鉸接,另一端與連桿一段鉸接;連桿另一端與抓斗中部鉸接,抓斗底部與機架鉸接。實際工作時,首先由液壓缸驅動動臂相對機架轉動,進一步由動臂帶動連桿相對運動,最后由連桿帶動抓斗相對機架轉動。液壓連桿機構有效避免了電磁吸附裝置工作過程中由于突發狀況,斷電或磁力不足從而導致鋼板脫落的問題。
2 液壓連桿機構運動學分析
液壓連桿裝置能否有效工作,對整個裝置的工作具有重要影響,需對其進行運動學分析與建模[8-10]。該結構中含有多個平面桿件,運用閉環矢量法對其進行建模,其過程相對簡單,能夠直觀表達出各個桿件之間的相互關聯,使分析過程更加簡明。
2.1 正運動學分析
由于鋼板磁吸液壓夾具共有兩個對稱分布的液壓連桿機構,其運動過程鏡像對稱,因此只需對其中之一進行運動學分析即可。圖2為該液壓連桿機構簡圖,在機架O點建立直角坐標系,水平方向的正方方向為x軸的正方向,豎直方向的正方向為y軸的正方向。機架上鉸接A、F兩點,原動件AB有工程機械的液壓系統提供動力,各桿件OA、OB、AB、BC、CD、DE、OF、FE、EG的方向矢量分別為L1、L2、L3、L4、L5、L6、L7、L8、L9,設各個桿件的尺寸長度用Li表示,且其尺寸長度為已知量;矢量位姿角用θi表示,各桿件的矢量位姿角θi的矢量方向定義為與x軸的正方向所形成的夾角,其逆時針方向為正方向。
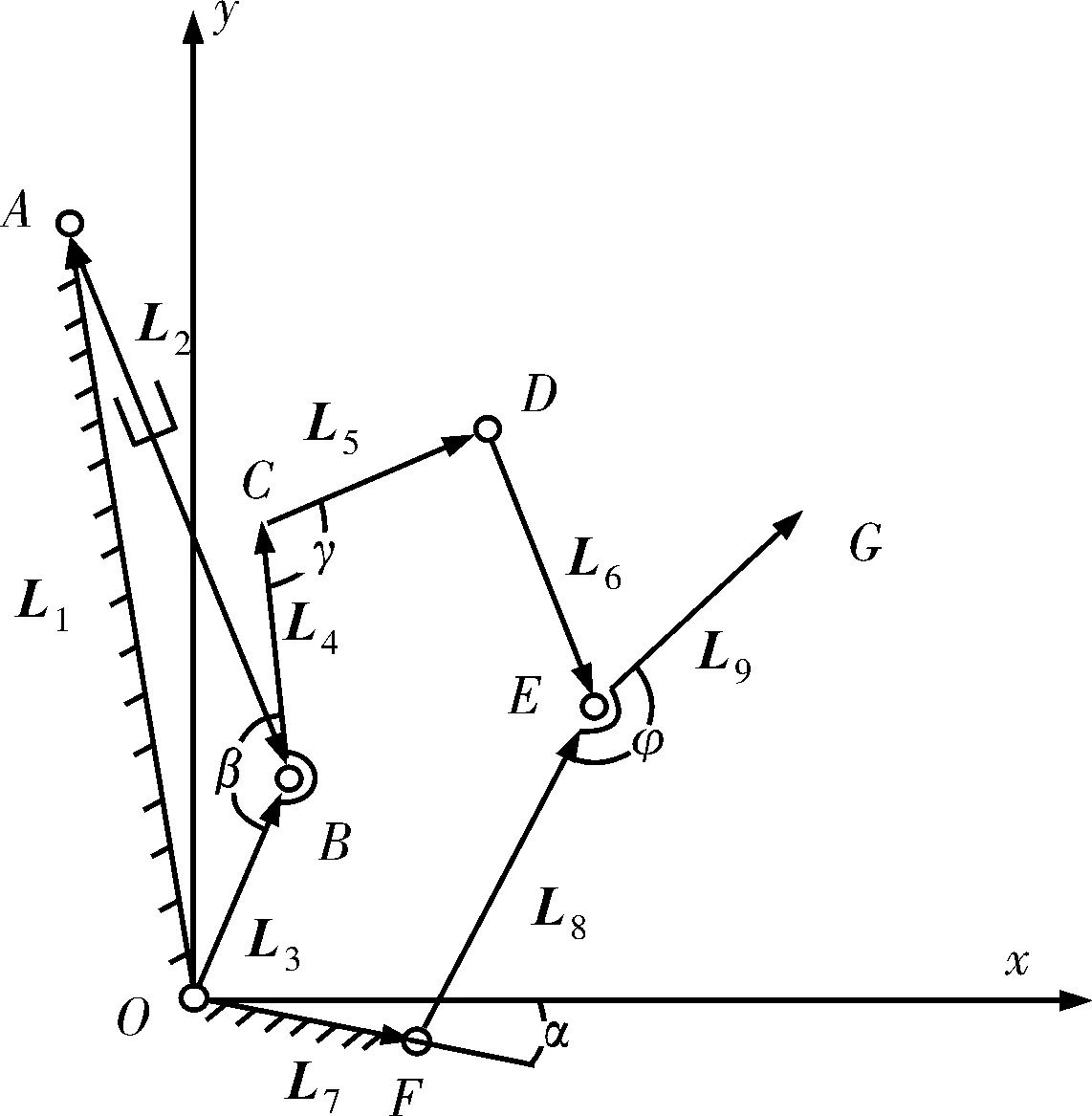
圖2
根據該機構的結構簡圖,可建立閉環OAB的矢量方程式為
L1+L2=L3
(1)
由矢量關系式(1)可得
(2)
根據機構已知機構尺度參數l1、l2、l3、θ1,對方程式(2)進行求解,為求得矢量位姿角θ3,將方程組(2)的方程式整理可得
(3)
令
(4)
則方程式(3)可整理為
Asinθ3+Bcosθ3+C=0
(5)
由三角函數萬能公式
(6)
對式(5)進行三角代換,并進一步化簡可得
(7)
對于式(7)存在實數解的條件是,其判別式為
Δ1=4A2-4(C-B)(B-C)≥0
(8)
可知為使得式(7)存在實數解為
(9)
建立閉環矢量OBCDEF的矢量方程為
L3+L4+L5+L6=L7+L8
(10)
由矢量關系式(10)可得
(11)
根據機構已知機構尺度參數l3、l4、l5、l6、l7、l8,且矢量位姿角θ3、θ4、θ5、θ7的大小關系為
(12)
對方程式(11)進行求解,可求得矢量位姿角θ8,其求解方法同矢量位姿角θ3的求解方法相同。
在求得矢量位姿角θ8的條件下,可對矢量位姿角θ9進行求解,矢量位姿角θ8、θ9的大小關系為
θ8+θ9=φ
(13)
求得矢量位姿角θ8、θ9,并且已知機構尺度參數l8、l9,可對G點進行坐標位置計算。
(14)
2.2 逆運動學分析
已知末端桿件的矢量位姿角,以及該裝置的各個從動桿件的機構尺度參數,可逆向求解原動件L2的尺寸參數l2,其閉環矢量方程與該裝置運動學正解方程式相同,將式(2)、(11)、(12)、(13)結合,根據各已知參數,可求矢量位姿角θ3。
根據矢量位姿角θ3,求得B點的坐標位置
(15)
已知A點的坐標為
(16)
即可求得原動件L2的尺寸參數l2為
(17)
3 實例驗證
該裝置的機構構型為確定條件,根據該裝置的實際作業工況,給定一組確定的各桿件的長度尺寸參數[11],其具體參數如表1所示;給定一組確定的矢量位姿角的參數,其具體參數如表2所示。已知各桿件長度為參數和矢量位姿角,則其正逆運動學分析均可得唯一解。
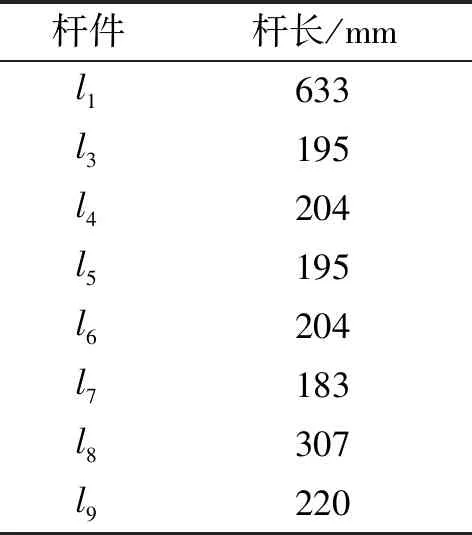
表1 桿件參數
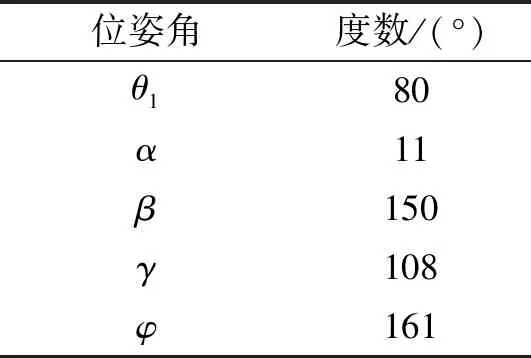
表2 矢量位姿角參數
其運動學正解,在實際作業中為保證該裝置能夠完成作業要求,保證抓斗的末端桿件L9最終狀態為平行于y軸,故給定油缸L2的工作伸長量為0~290 mm,油缸從初始位置開始工作,到達最大伸長量時,可求得矢量位姿角θ8和G點坐標位置,其結果為:
(18)
其運動學逆解,在實際作業中抓斗從初始位置運動到達其規定作業要求位置,其矢量位姿角θ8的變化范圍為0°~171°,對其逆向求解,可求得原動件油缸的工作伸長量為
l2=290 mm
(19)
4 仿真分析
根據該裝置的結構尺寸,基于三維軟件Creo進行建模[12-14],建立起該裝置的虛擬樣機模型,依據表1和表2,設定各桿件的具體參數。基于該軟件的仿真模塊,對裝置進行剛性運動建模分析。
針對該裝置正運動學仿真分析,根據油缸工作伸長量,以及實際運動時長為5 s,設定油缸伸出速度為58 mm/s。對該裝置進行仿真分析,得到抓斗擺動角度,以及抓斗末端G點沿x軸、y軸位置隨時間變化曲線,如圖3、圖4所示。
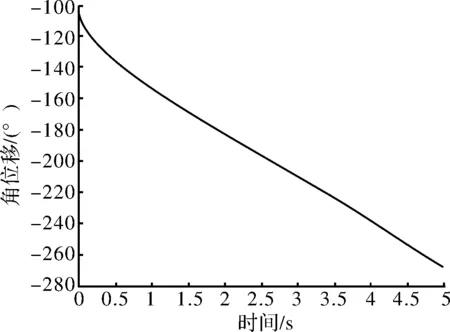
圖3 抓斗擺動角度參數曲線
結合圖3、圖4所示,抓斗擺動角度、抓斗末端G點沿x軸、y軸位置與算例中所得結果(18)相同,即驗證了該裝置正運動學分析的正確性。
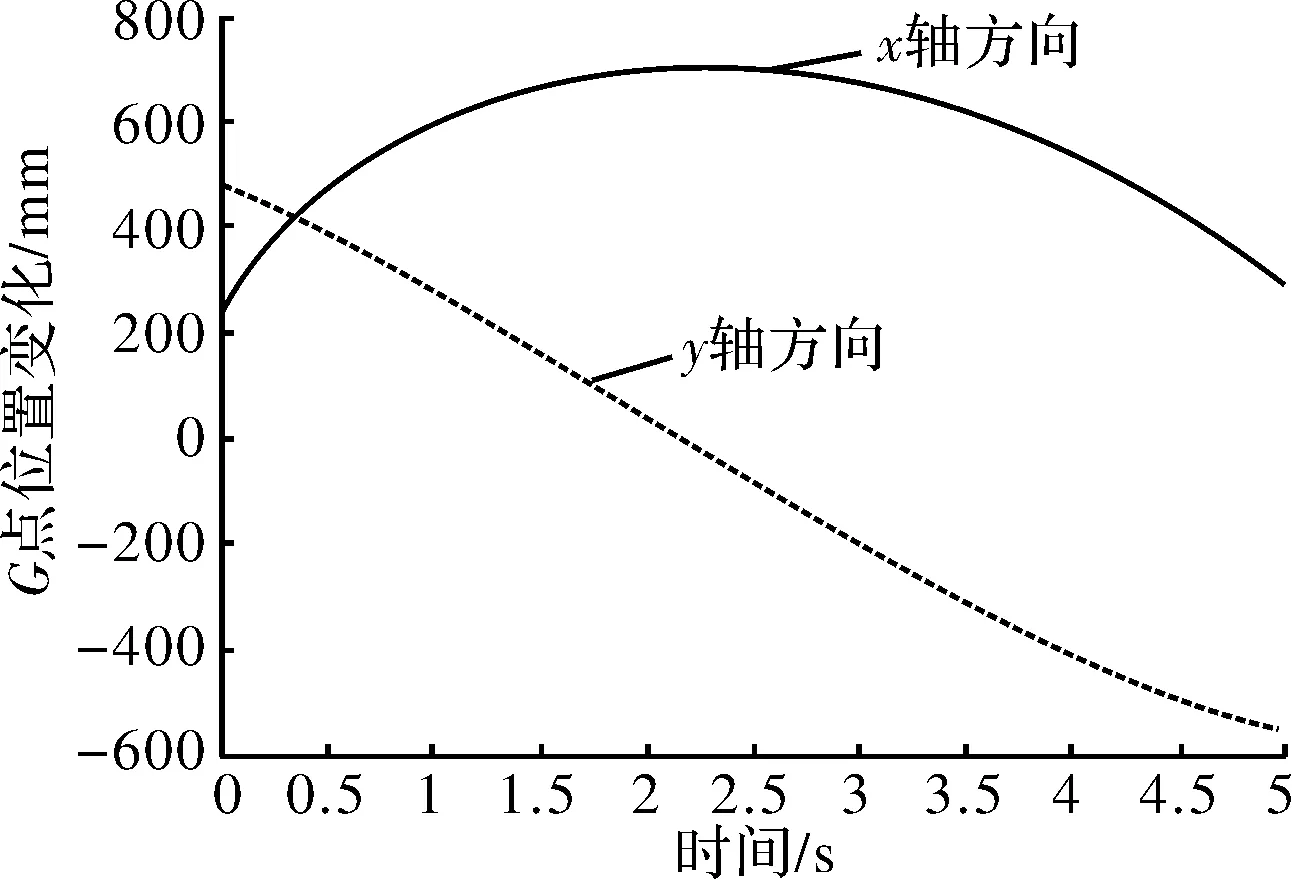
圖4 抓斗末端點位置變化曲線
針對該裝置逆運動學分析,根據抓斗擺動角度,以及實際運動時長為5 s,設定抓斗擺動角速度為34.2 rad/s,針對該裝置進行仿真分析,得到原動件油缸伸長量隨時間變化曲線,如圖5所示。
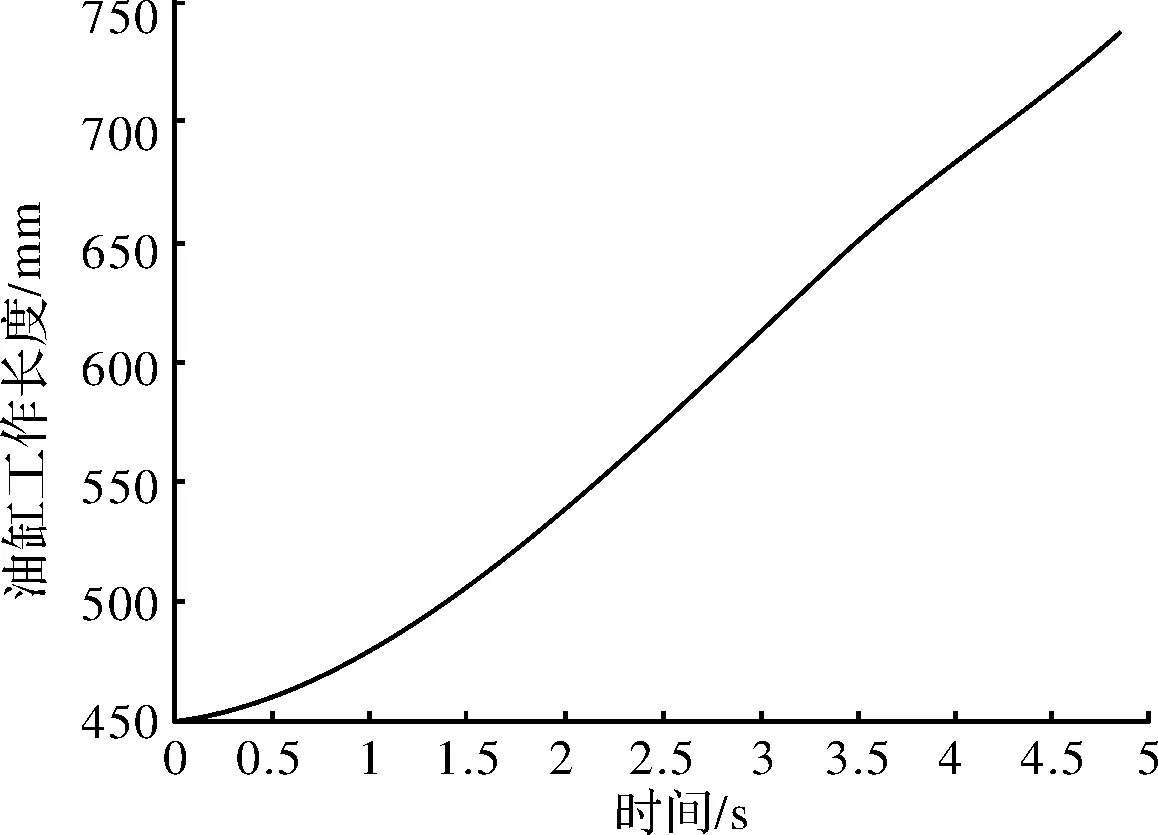
圖5 油缸伸長量參數曲線
結合圖5所示,在給定抓斗擺動角度的條件下,原動件油缸伸長量與算例中所得結果相同,即驗證了該裝置逆運動學分析的正確性。
5 結論
針對該種鋼板磁吸液壓夾具的結構特征,運用閉環矢量法分析對其運動學規律進行仿真分析,驗證了該裝置的液壓連桿機構具有確定的運動,能夠有效避免電磁吸附裝置發生故障時,鋼板脫落的問題。對液壓連桿裝置的機構分析以及運動學仿真,驗證了其運動學模型的正確性,為后續動力學仿真奠定了基礎。
