基于Process Simulate的工業機器人信息物理融合系統*
2022-02-22 02:52:04朱文華顧鴻良
制造技術與機床 2022年2期
朱文華 陶 涵 蔡 寶 顧鴻良 王 佳
(上海第二工業大學工程訓練中心,上海 201209)
近年來,隨著數字技術的更新迭代,傳統制造業受到了全球范圍內的挑戰。工業4.0已被國際認可為傳統制造業應對數字技術的戰略反應之一。信息物理融合作為工業4.0中數字孿生主要概念之一,廣泛應用于工業和研究活動。數字孿生與信息物理融合最初出現在航天航空領域,用于航空航天飛行器的健康維護與保障[1];2013年首次出現制造業信息物理融合的報道,揭示虛擬模型可代替物理實體,作為生產資源應用于先進生產制造中。2016年西門子工業論壇上,信息物理融合在制造業中正式被定義為制造業數字孿生,信息物理融合完整再現了整個制造業流水線[2]。
本文結合虛擬現實技術,工業互聯網技術等先進技術,將數字孿生、虛擬仿真應用于工業機器人。研發孿生數據驅動的虛擬工業機器人系統,通過建立實體工業機器人和虛擬工業機器人之間的通信信道,為實體工業機器人操作提供可視化控制和支撐,提高操作安全指數和工業生產可視化操作,對于工業機器人的應用與教學領域,具有重要意義。
1 工業機器人信息物理融合系統構建
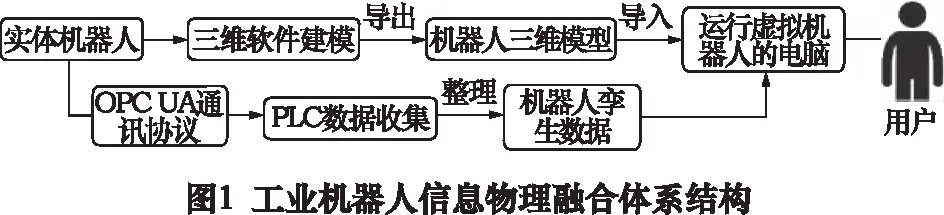
工業機器人信息物理融合系統框架中,通過整理實體工業機器人和虛擬工業機器人實時數據,實時數據與虛擬工業機器人儲存于電腦中,形成基于信息物理融合為核心的工業機器人智能交互系統[3]。如圖1所示,系統中采用OPC UA協議進行數據傳輸,采用博途軟件進行通訊編程,以實現傳輸來的數據驅動虛擬機器人。對實體機器人PLC采用博途提供的TCP/IP協議,保證數據的雙向傳輸和準確返回。
1.1 實體工業機器人流程設計
本文中實體工業機器人采用的是ABB公司的IRB120工業機器人[4]。IRB120是ABB迄今最小的多用途機器人,有效載荷為3 kg,工作范圍達580 mm,主要由示教器、控制器和機器人本體等部件構成。
示教器是實體工業機器人人機交互接口,機器人的示教和操作基本都是由示教器完成。
控制器用來控制機器人完成規定的動作,主要可實現倉儲、碼垛、打磨、裝配和視覺5大動作。
機器人本體是實體工業機器人機械主體,是用來完成控制器規定動作任務的執行機構,所以又稱為操作機,主要由機械臂、驅動裝置、傳動裝置和內部傳感器等部分組成。
機器人具體的功能作業流程為:
(1)倉儲任務:機器人安裝夾具,光電傳感器檢測傳送帶傳送過來的輪子,機器人通過夾具夾取輪子并依次放入庫區。之后放回夾具,機器人回到初始位置。
(2)碼垛任務:機器人安裝吸盤,從庫區將梯形玻璃物料分揀至檢測區域,按照程序判斷分揀入左右兩個不同分揀區。完成任務后放回吸盤,回到初始位置。
(3)打磨任務:機器人安裝夾具運動至磨砂紙對螺母進行打磨,打磨結束后放回夾具,磨砂紙停止轉動,機器人回到初始位置。
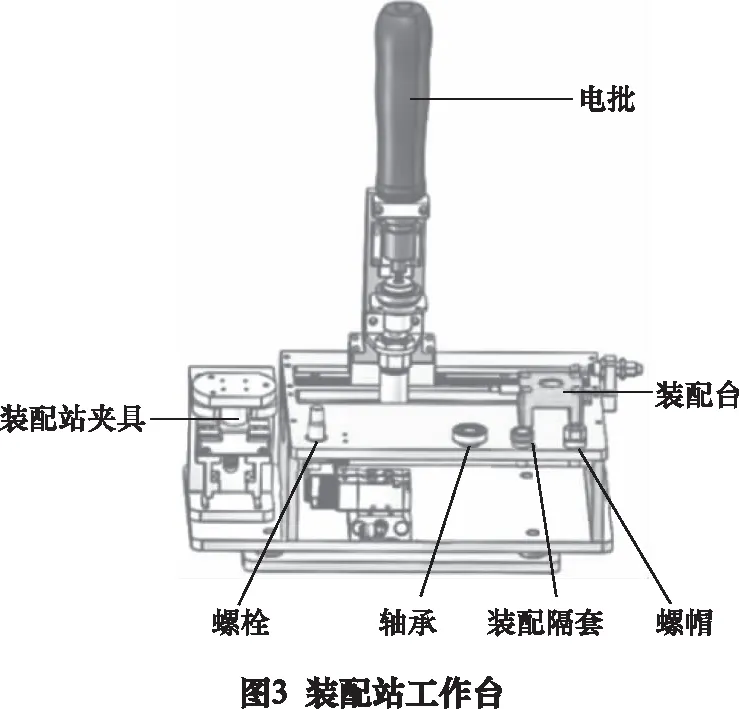
(4)裝配任務:機器人安裝夾具,通過夾具將底座、軸承、墊塊和螺母按順序放置裝配臺中,啟動電批夾具連續運動90°將螺母擰緊。動作完成后機器人放回夾具,回到初始位置。
(5)視覺任務:由機器人攝像頭判斷七色板模具所在位置,由機器人外圍設備吸盤固定七色板模具,再依次在右邊的拼盤上完成七色板拼圖。完成拼圖后機器人放回吸盤,回到初始位置。
1.2 虛擬工業機器人開發
1.2.1三維模型建立
為了能夠精準地展現虛擬工業機器人模型,本文使用NX、SolidWorks和Maya等工程軟件進行建模[7],主要包括幾何建模和物理建模兩個部分:(1)幾何建模:應用NX和SolidWorks等軟件將實體工業機器人按比例建立出其幾何形狀。為了保證模型的準確性,模型參數均來自于實體機器人實際測量出的等比例數據。(2)物理建模:通過3DMaxs對幾何建模進行貼圖渲染,使其更加立體化、真實化[8]。

1.2.2虛擬工業機器人動作設計
將已經完成的工業機器人三維模型導入Process Simulate(下文簡稱PS)中。在導入之前,需要定義工業機器人類型,在新建文件夾中選擇機器人類型,便可導入在NX軟件中已經做好的機器人模型,利用PS組件功能直接使用已經定義好的零部件模型。選中已經導入的工業機器人模型,通過選擇集合建模范圍命令可以查看所有轉入的零部件類型。
以裝配站動作設計為例,將需要拆分的機器人抓手工具拖入新建的資源類型中,創建坐標,坐標定位抓手中心,坐標朝向需與機器人朝向一致完成資源拆分。
以創建零部件命令創造軸承、螺栓、裝配隔套和螺帽等零部件,把相對應的零部件拖動至部件命令下完成零件拆分。
選中機器人右擊Mount Tool,Mount Tool選擇抓手,通過創建路徑操作選擇對應的零部件完成對點軌跡操作,其中包括抓取軸承、螺栓、裝配隔套和螺帽等操作,根據實際物料尺寸調整姿態,在裝配槽通過電批完成零部件的擰緊裝配。最后加載到路徑編輯器中完成虛擬工業機器人裝配動作設計。
2 孿生數據采集和傳輸
孿生數據是指從物理實體實時傳輸的算法數據,幫助并指導虛擬體完成精準的反饋操作和動作改進。以實體工業機器人與PS平臺作為仿真基礎,建立實體機器人PLC與PS的通信連接,運用算法程序對采集來的孿生數據進行整理,分析及傳輸,從而使虛擬工業機器人實時完成實體機器人相應動作,在PS仿真平臺進行控制和操作。
2.1 PS與PLC通信連接
本文通信連接需要準備一臺能夠運行博途V13的計算機。在博途V13加入常規IE網卡,設置組態網卡與計算機IP地址一致,完成軟硬件環境搭建。
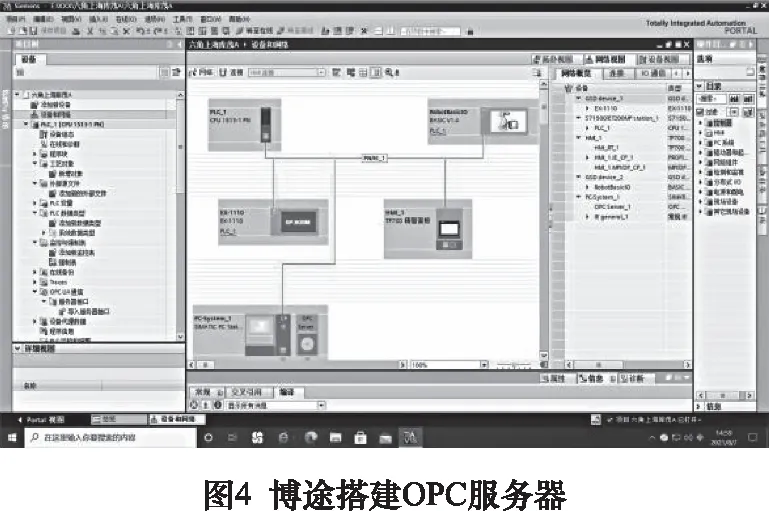
完成IP地址分配后與同一網段的PLC建立通信通道。在博途OPC_ES中選擇S7連接,設置本地ID為OPC_ES_PLC,通過此接口與同一網段的PLC硬件建立通信通道。
選擇博途OPC_ES中OPC Server進行編譯。OPC是針對現場控制系統的工業標準接口,專門作用于硬件與軟件的接口連接。OPC搭建完成后,PLC與博途通過OPC服務器傳輸數據。
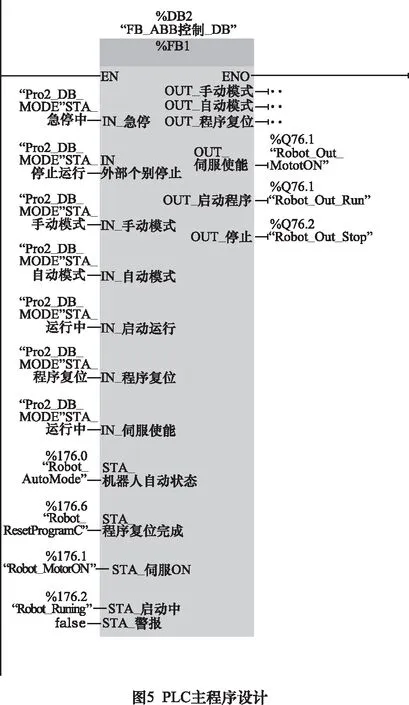
OPC服務器搭建完成后,需要在博途上編寫邏輯塊,進而制作機器人啟動運動的邏輯塊。由于機器人多個動作連續運行,自動運行等功能涉及到多個信號的關聯動作,因此需要制作邏輯塊來實現。
PLC離線程序未完成時,使用CEE程序模擬線體運動,檢驗機器人程序設置是否正確。CEE-Cyclic event evaluation,是PS的邏輯控制單元,可通過制作module來實現整線運行。
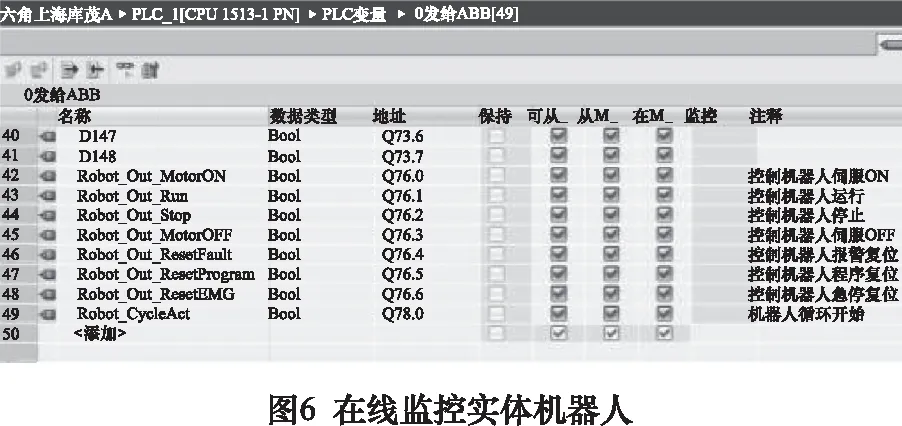
最后按照工藝設計,對PLC離線程序進行完善,完成整線控制。PLC程序除了保持虛擬機器人實時跟蹤實體機器人外,還包括虛擬機器人對實體機器人的啟停控制,模式調試等雙向傳輸程序。當實體機器人出現故障停止運行時,可以通過虛擬機器人界面切換手動模式,操縱實體機器人進入急停狀態啟動報警信號并停止運行相關動作,待排除相關故障后再啟動運行。
當機器人在手動模式、自動模式和空運行等模式下程序都正常運行時,調試結束,PS與PLC通信連接搭建完成。
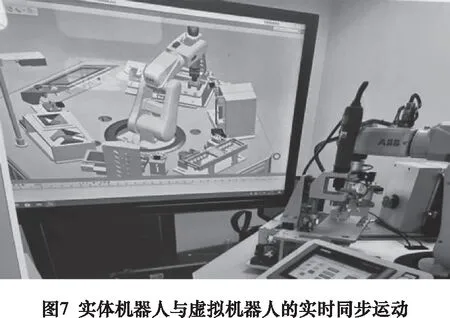
因此,整個機器人數據采集過程可以簡單概括為三步:第一步實現IRB120工業機器人的數據采集,包括機器人的動作、初始位置和作業位置等數據;第二步將采集到的動態數據和靜態數據分類整理,獲得孿生數據[9];第三步將獲得的孿生數據驅動電腦端的虛擬工業機器人,實現工業機器人與虛擬工業機器人的實時同步運動(圖7),同時獲得虛擬機器人部分數據反饋。
2.2 PS程序設計
在虛擬調試過程中,虛擬機器人是按照預設的點對點的運動軌跡進行運動。而我們所創建的信息物理融合系統是基于所有由程序執行的運動軌跡,所以我們需要阻止虛擬機器人動作從操作序列本身執行。我們在PS仿真平臺中選擇虛擬機器人,打開MAIN操作的的OLP命令字段,設置循環操作,等待時間和停止狀態,確保虛擬機器人每個動作是由程序執行運行。對整個工藝仿真來說,循環操作意味著一個工藝結束,可以直接進行下一個動作。
# While ( NOT STOP ) Do
# if ( CONTINUE_1 ) Then
# CallPath R1 LOAD PART
# Elsif ( CONTINUE_2 ) Then
# CallPath R1 REMOVE PART
# SetSignal CycleDone= 1
# WaitTime 0.3
# SetSignal
# CycleDone= 0
# Endif
# Endwhile
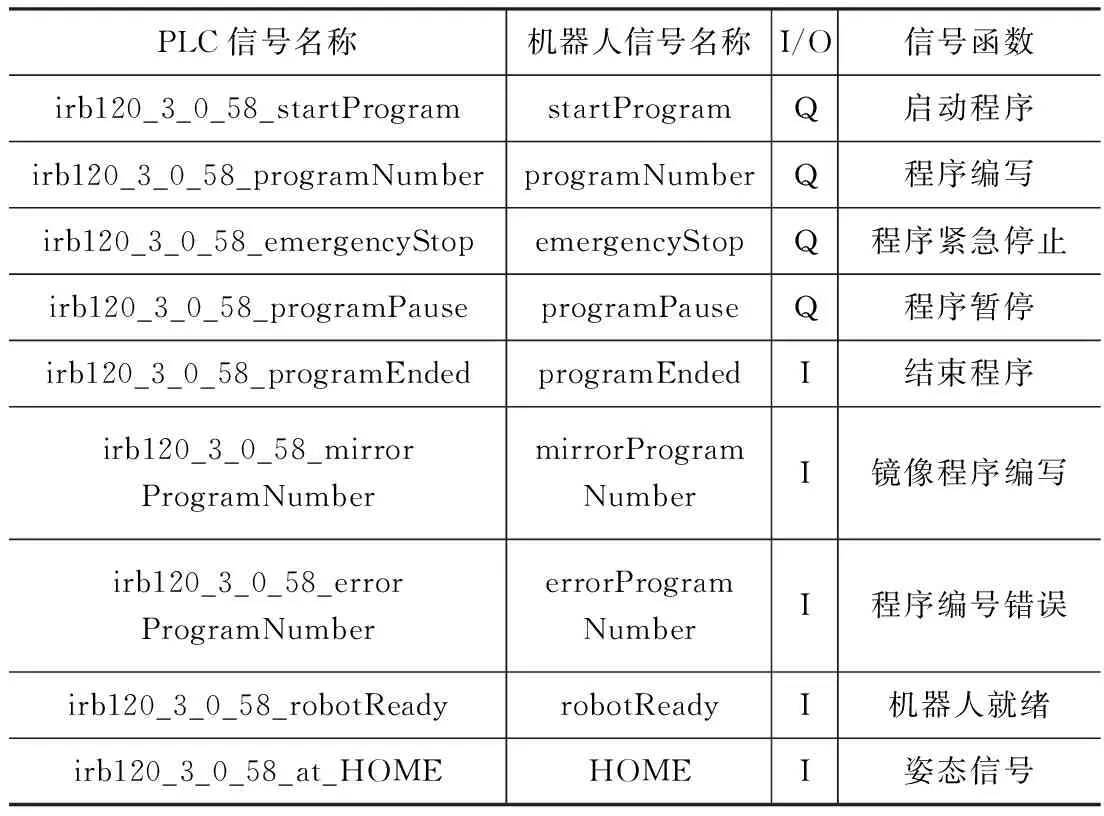
表1 虛擬機器人默認信號
采集數據具體過程,我們以裝配站為例,實體機器人開始裝配動作時,虛擬機器人系統程序初始化。
當實體機器人安裝裝配握爪時,實體機器人將安裝信號通過PLC中OPC傳輸給PS平臺中,通過PS平臺中OLP編寫程序使虛擬工業機器人同時安裝裝配握爪。在實體機器人抓取軸承,螺帽等零部件時,實體機器人通過傳感器將零部件抓取的信號傳輸給PS平臺中,虛擬機器人通過采集到的點位數據判斷抓取零部件。
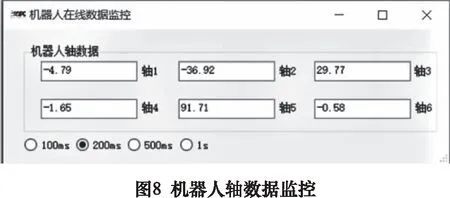
實體機器人通過博途中TCP/IP協議與虛擬機器人進行數據交換,接收虛擬機器人工作狀態數據,進行虛實融合。由于工業機器人與虛擬機器人關節角度數據格式不同,因此需要將實體機器人與虛擬機器人各個關節進行標定,實現機器人六軸數據可視化監測(圖8)。
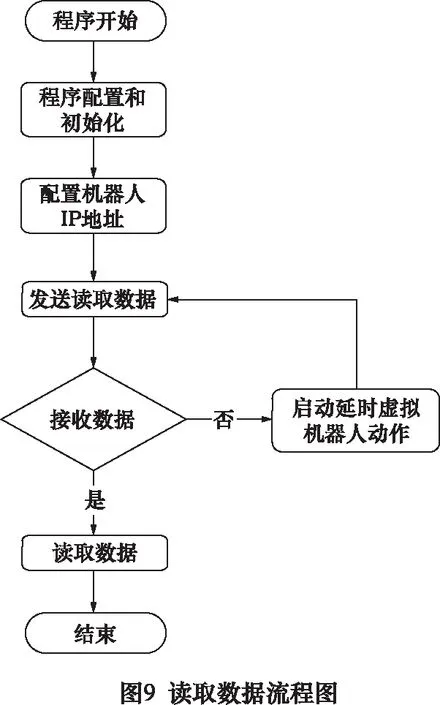
當零部件全部完成抓取后,啟動電批對零部件進行旋轉擰緊操作,啟動的同時電批傳感器將信號實時傳輸給虛擬機器人。若信號傳輸出現問題,則虛擬機器人停止接受數據傳輸,并啟動延時動作,采集數據流程圖如圖9所示。
2.3 孿生數據處理
在PS平臺中,數據傳輸需要將虛擬環境與PLC程序采集的數據進行對接。通過機器人程序清單中的上傳程序,將采集來的信號數據導入虛擬工業機器人中,為接下來實時同步控制虛擬工業機器人提供數據支持,同時也可以通過PS平臺中的虛擬機器人界面在線監控實體機器人。
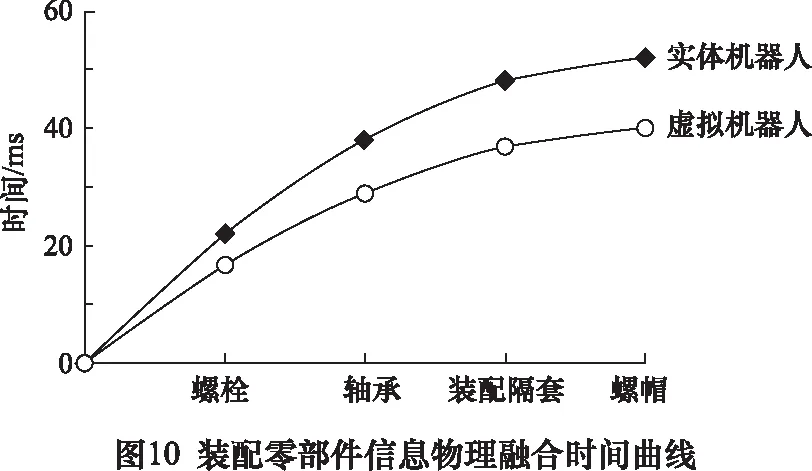
以裝配站為例,經測試,PS軟件中的虛擬工業機器人的裝配動作與實體機器人會有100 ms以內的誤差,裝配零部件誤差如圖10所示。橫坐標為機器人運動至各個零部件位置,縱坐標為虛擬機器人與實體機器人運動至位置點的時間差,螺栓代表虛擬機器人和實體機器人運動至裝配站螺栓位置,軸承代表虛擬機器人和實體機器人運動至裝配站軸承位置,裝配隔套代表虛擬機器人和實體機器人運動至裝配站裝配隔套位置,螺帽代表虛擬機器人和實體機器人運動至裝配站螺帽位置。
3 結語
本文基于PS軟件開發了工業機器人信息物理融合系統,該系統可用于工業機器人在虛擬空間中的線上調試,不需要真實的機器人硬件。通過實現實體工業機器人與虛擬工業機器人的實時同步運動,改進了工業機器人的操作方式。該系統可用于開發工業機器人新工藝,能夠縮短其工藝開發周期,具有較大的工程應用價值[10]。后續研究將針對復雜的工業機器人任務功能,應用數字孿生技術進行調試與開發。
猜你喜歡
井岡教育(2022年2期)2022-10-14 03:11:44
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
現代出版(2020年3期)2020-06-20 07:10:34
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:00
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
中學生數理化·中考版(2017年12期)2017-04-18 12:55:05
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
