無(wú)人機(jī)集群牽制控制系統(tǒng)特征值分析
2022-02-23 08:32:34劉錦濤禹明剛
系統(tǒng)工程與電子技術(shù) 2022年2期
劉錦濤, 何 明, 羅 玲, 柳 強(qiáng), 禹明剛
(陸軍工程大學(xué)指揮控制工程學(xué)院, 江蘇 南京 210007)
0 引 言
無(wú)人機(jī)集群是由一定數(shù)量的無(wú)人機(jī)共同組成,以交感網(wǎng)絡(luò)為基礎(chǔ),整體具有能力涌現(xiàn)特點(diǎn)的空中移動(dòng)多智能體系統(tǒng)。相比于追求將所有功能集成于一身的傳統(tǒng)飛行器,無(wú)人機(jī)集群具有多智能體系統(tǒng)的諸多優(yōu)點(diǎn),如感知與執(zhí)行的分布式與并行性、冗余性、容錯(cuò)性、單個(gè)成本的低廉性及整體功能的涌現(xiàn)性。尤其是近年來(lái)隨著計(jì)算機(jī)技術(shù)、無(wú)線移動(dòng)網(wǎng)絡(luò)技術(shù)、控制技術(shù)、多智能系統(tǒng)理論、復(fù)雜網(wǎng)絡(luò)科學(xué)的迅猛發(fā)展,以協(xié)同飛行控制為核心的無(wú)人機(jī)集群已成為飛行器發(fā)展的新趨勢(shì)。當(dāng)前,各軍事強(qiáng)國(guó)普遍認(rèn)為無(wú)人機(jī)集群作戰(zhàn)將是未來(lái)顛覆性的作戰(zhàn)樣式,也是通信、網(wǎng)絡(luò)、控制和機(jī)器人等學(xué)科重要的研究方向。
傳統(tǒng)的無(wú)人機(jī)指揮控制多采用集中控制模式,指揮控制站收集一個(gè)或多個(gè)無(wú)人機(jī)數(shù)據(jù),運(yùn)行相應(yīng)算法并將命令發(fā)送回執(zhí)行器。雖然集中控制在理論上可以達(dá)到最優(yōu)的系統(tǒng)性能,但考慮到射頻無(wú)線電通信易受干擾以及通信隱蔽性等限制,這種策略在軍用無(wú)人機(jī)集群中是難以滿足的,另外計(jì)算資源、通信帶寬、控制延遲等限制,也是制約集中控制模式的因素。所以無(wú)人機(jī)之間只能使用局部信息(可通過(guò)視覺(jué)系統(tǒng)、近距離紫外光通信獲得周?chē)鸁o(wú)人機(jī)的信息)。因此,分布式控制策略是更實(shí)際的解決方案。相對(duì)于集中控制模式,它基于局部信息以及本地控制器的計(jì)算可實(shí)現(xiàn)次優(yōu)性能,優(yōu)點(diǎn)是具有更高的魯棒性和可行性。此時(shí),地面指揮控制站只需要選擇無(wú)人機(jī)群的一小部分甚至其中一架作為領(lǐng)導(dǎo)者,對(duì)其實(shí)施直接控制,而其他無(wú)人機(jī)則通過(guò)無(wú)人機(jī)之間的協(xié)同規(guī)則實(shí)現(xiàn)間接控制。
蜂群中只需要少量的個(gè)體(5%)就能引導(dǎo)整個(gè)群體飛到新的巢穴中,受此啟發(fā),有學(xué)者提出了牽制控制的集群控制方法。牽制控制方法對(duì)于無(wú)人機(jī)集群、無(wú)人車(chē)集群等工程系統(tǒng)具有非常好的應(yīng)用價(jià)值,通過(guò)向集群部分節(jié)點(diǎn)發(fā)布控制指令并采用牽制控制方法,可引導(dǎo)集群朝著預(yù)定的目標(biāo)運(yùn)行。早在2006年,Olfati-Saber構(gòu)建了比較完整的蜂擁控制算法框架,設(shè)計(jì)了有領(lǐng)導(dǎo)者、無(wú)領(lǐng)導(dǎo)者和障礙環(huán)境中的蜂擁控制算法。不足之處是Olfati-Saber方法假設(shè)所有成員都能獲取虛擬領(lǐng)導(dǎo)者的位置和速度信息,這其實(shí)需要全局通信,在實(shí)際過(guò)程中是難以實(shí)現(xiàn)的。在隨后的研究表明,當(dāng)只有一小部分節(jié)點(diǎn)被告知虛擬領(lǐng)導(dǎo)者的狀態(tài)時(shí),蜂擁控制也是可以實(shí)現(xiàn)的,即可以通過(guò)牽制控制實(shí)現(xiàn)集群的蜂擁控制。通過(guò)這種方式,不知情的成員可以由知情的成員驅(qū)動(dòng),因此集群只需要更少的通信成本。但是文獻(xiàn)[8]沒(méi)有提供牽制節(jié)點(diǎn)選擇算法,也沒(méi)有給出應(yīng)該通知哪些節(jié)點(diǎn)的明確規(guī)則。在牽制控制節(jié)點(diǎn)選取方面,最少節(jié)點(diǎn)集合的選取是一個(gè)NP-hard問(wèn)題,目前尚無(wú)最少控制節(jié)點(diǎn)集的直接求解方案。分布式控制系統(tǒng)的性能不僅取決于本地控制參數(shù),還取決于牽制節(jié)點(diǎn)的選擇以及控制網(wǎng)絡(luò)的結(jié)構(gòu)。當(dāng)無(wú)人機(jī)集群處于某一個(gè)確定的拓?fù)浣Y(jié)構(gòu)時(shí),為了找到一個(gè)數(shù)量最少的輸入控制節(jié)點(diǎn)集合實(shí)施控制,使整個(gè)系統(tǒng)是結(jié)構(gòu)可控的,是近年來(lái)研究的一個(gè)熱點(diǎn)問(wèn)題。
本文通過(guò)分析蘊(yùn)含圖的結(jié)構(gòu)特性的Laplace矩陣的譜,尤其是,其大小直接反映了圖連通性、魯棒性甚至是集群分布協(xié)同控制的收斂性。通過(guò)施加牽制控制,進(jìn)一步將Laplace矩陣變?yōu)樵鰪VLaplace矩陣。通過(guò)估計(jì)的特征值的大致范圍以及牽制控制造成特征值的變化趨勢(shì),可以初步得到牽制控制對(duì)系統(tǒng)的收斂性影響。
1 基于矩陣譜的分析方法
Laplace矩陣的譜包含有關(guān)圖的結(jié)構(gòu)特性的信息,包括它的連接性(用不等式表示)和生成樹(shù)的個(gè)數(shù)(用恒等式表示),當(dāng)增加或刪除邊時(shí),Laplace矩陣的譜同樣會(huì)隨著圖形的結(jié)構(gòu)變化而變化。尤其是的大小直接反映了圖連通的魯棒性,甚至是集群分布協(xié)同控制的收斂性。
相關(guān)研究有,文獻(xiàn)[16]提出了一種基于鄰接矩陣譜的子圖中心性度量方法。文獻(xiàn)[17]提出了一種基于譜的中心性度量方法,對(duì)節(jié)點(diǎn)在牽制控制中的重要性進(jìn)行評(píng)價(jià)并排序。文獻(xiàn)[18]提出擾動(dòng)策略的節(jié)點(diǎn)刪除方法,通過(guò)一定順序刪除節(jié)點(diǎn)以增大圖的譜間隙(即第1個(gè)Laplace矩陣的最小特征值)以增強(qiáng)網(wǎng)絡(luò)的一致性和收斂性能。在文獻(xiàn)[19]引入了一種新的度量方法,根據(jù)節(jié)點(diǎn)從網(wǎng)絡(luò)中移除時(shí)對(duì)網(wǎng)絡(luò)同步性產(chǎn)生的影響對(duì)節(jié)點(diǎn)進(jìn)行排序。
文獻(xiàn)[20]定義同步指數(shù)為
(1)
式中:是Laplace矩陣的特征值比,即最大特征值除以第二小特征值。特征值比越小,網(wǎng)絡(luò)的同步性能越好。另外,該方法只需要求解Laplace矩陣的兩個(gè)特征值,計(jì)算簡(jiǎn)單。

定義Laplace矩陣最大特征值和第二小特征值的變化為

(2)
進(jìn)一步地將節(jié)點(diǎn)的移除所引起的變化表示為

(3)
值得注意的是,由于遠(yuǎn)比大,因此Δ受Δ的影響要遠(yuǎn)大于Δ。因此,當(dāng)刪除一個(gè)節(jié)點(diǎn),如果對(duì)Δ的影響最大,通常對(duì)Δ的影響也將是最大的。
從復(fù)雜網(wǎng)絡(luò)中刪除一個(gè)節(jié)點(diǎn)可以建模為刪除Laplace矩陣的相關(guān)行和列,以及減少對(duì)角項(xiàng)中代表其他節(jié)點(diǎn)與此節(jié)點(diǎn)相連接的數(shù)目。對(duì)于大規(guī)模網(wǎng)絡(luò),單個(gè)節(jié)點(diǎn)的移除,這種擾動(dòng)幾乎可以忽略不計(jì)。因此,通過(guò)去除Laplace矩陣的第行和第列來(lái)近似去除節(jié)點(diǎn)的效果。如果去掉該節(jié)點(diǎn)而引起的Δ值很小,認(rèn)為該節(jié)點(diǎn)對(duì)網(wǎng)絡(luò)的同步性不太重要。Laplace矩陣的同步指數(shù),是表征網(wǎng)絡(luò)同步性的一個(gè)重要指標(biāo),同步指數(shù)越小,網(wǎng)絡(luò)的同步性能越好。同步指數(shù)越小表明Laplace矩陣最大特征值和次小特征值 的比值很接近于1,進(jìn)而表明Laplace矩陣的所有特征值幾乎都相等。
2 系統(tǒng)模型
2.1 無(wú)人機(jī)集群動(dòng)力學(xué)模型
圖論和矩陣論是對(duì)復(fù)雜網(wǎng)絡(luò)進(jìn)行定量分析的數(shù)學(xué)基礎(chǔ),為了進(jìn)一步從數(shù)量的角度描述無(wú)人機(jī)集群行為,基于圖論框架進(jìn)行建模分析,是當(dāng)前最為簡(jiǎn)潔有效的分析方式,再進(jìn)一步將圖模型轉(zhuǎn)換為矩陣方程,可以建立起復(fù)雜網(wǎng)絡(luò)與控制理論諸多聯(lián)系。
本文主要考察通信拓?fù)鋵?duì)無(wú)人機(jī)集群控制的影響,如圖1所示,假設(shè)無(wú)人機(jī)集群包含,,…,,架無(wú)人機(jī),它們具有有限范圍的感知區(qū)域。(通常無(wú)人機(jī)之間通過(guò)無(wú)線通信進(jìn)行信息交流,也可以通過(guò)機(jī)載雷達(dá)、視覺(jué)等傳感器獲取周?chē)鸁o(wú)人機(jī)狀態(tài)信息,如文獻(xiàn)[22]在無(wú)線電靜默條件下,通過(guò)使用視覺(jué)傳感器實(shí)現(xiàn)了蜂擁飛行。)將單個(gè)無(wú)人機(jī)抽象為一個(gè)節(jié)點(diǎn),無(wú)人機(jī)之間的交互抽象為節(jié)點(diǎn)之間的連線,如圖1中實(shí)線所示。另假設(shè)黑色方塊為地面指揮控制站,且僅與部分無(wú)人機(jī)聯(lián)絡(luò)通信,如圖1中虛線所示。所有無(wú)人機(jī)節(jié)點(diǎn)組成一個(gè)頂點(diǎn)集={,,…,},假定無(wú)人機(jī)通信鏈路是雙向的,將它們之間的聯(lián)系抽象為邊。定義邊集合,如果{,}存在連接關(guān)系則{,}∈?[]。最終,無(wú)人機(jī)集群可抽象為一個(gè)無(wú)向無(wú)環(huán)簡(jiǎn)單圖={,,}。指揮控制站向集群發(fā)布控制指令為虛擬領(lǐng)導(dǎo)者的位置與速度,引導(dǎo)無(wú)人機(jī)集群飛往預(yù)定目標(biāo)。

圖1 無(wú)人機(jī)集群的圖映射Fig.1 Graph mapping of unmanned aerial vehicle swarm
不失一般性,忽略無(wú)人機(jī)自身動(dòng)力學(xué)特性,將無(wú)人機(jī)抽象為三維運(yùn)動(dòng)的質(zhì)點(diǎn)。
考慮個(gè)無(wú)人機(jī)工作在維歐幾里得空間上,其質(zhì)點(diǎn)運(yùn)動(dòng)學(xué)方程為

(4)
式中:,,∈分別為無(wú)人機(jī)的位置向量、速度向量和加速度向量,=1,2,…,。
時(shí)刻無(wú)人機(jī)集群構(gòu)成的無(wú)向圖()由節(jié)點(diǎn)和邊組成,其中節(jié)點(diǎn)集合用={1,2,…,}表示,邊的集合用()={(,)∈×,∈()}表示。設(shè)是無(wú)人機(jī)集群的感知半徑,期望距離為,則無(wú)人機(jī)鄰域定義為

(5)
無(wú)人機(jī)集群網(wǎng)絡(luò)可以使用Laplace矩陣表示。Laplace矩陣定義為

(6)
式(6)中,僅當(dāng)∈,=1,否則=0。
滿足下列平方和性質(zhì):

(7)
為避免個(gè)體間發(fā)生碰撞,規(guī)定無(wú)人機(jī)集群系統(tǒng)的期望演化目標(biāo)為
‖-‖=, (,)∈;<
(8)
并將式(8)命名為-lattices系統(tǒng)。但由于個(gè)體之間的吸引力和排斥力的相互作用,會(huì)導(dǎo)致難以達(dá)到理想的-lattices,最終演變?yōu)?/p>
-+≤‖-‖≤+, (,)∈
(9)
式(9)被稱為類(lèi)-lattices系統(tǒng)。
2.2 控制器設(shè)計(jì)
設(shè)時(shí)刻控制輸入為

(10)


(11)
式中:=sign(-)為期望間距控制項(xiàng)。當(dāng)期望距離=0時(shí),式(11)由蜂擁問(wèn)題退化為二階一致性問(wèn)題。將sign函數(shù)按照坐標(biāo)進(jìn)行分解。


(12)
式中:∈為時(shí)刻虛擬領(lǐng)導(dǎo)者的速度向量;()是與牽制節(jié)點(diǎn)的選擇和時(shí)間相關(guān)的參數(shù),時(shí)刻()的數(shù)學(xué)表示為

=diag(,,…,)
定義增廣Laplace矩陣
=+k
(13)

無(wú)向圖初始狀態(tài)(0)是連通的。若初始狀態(tài)不是連通的,分為個(gè)子網(wǎng),則每個(gè)子網(wǎng)至少有一個(gè)牽制點(diǎn),可得到相同的結(jié)論。
初始狀態(tài)無(wú)碰撞。
虛擬領(lǐng)導(dǎo)者速度固定。
考慮一個(gè)無(wú)人機(jī)集群運(yùn)動(dòng)方程如式(1)所示,控制輸入如式(6)所示,則任取一個(gè)或多個(gè)節(jié)點(diǎn)作為牽制節(jié)點(diǎn),均有:
(1) 所有無(wú)人機(jī)相對(duì)位置最終會(huì)趨向lattices;
(2) 所有無(wú)人機(jī)速度會(huì)趨向虛擬領(lǐng)航者速度()(對(duì)文獻(xiàn)[25]速度一致性證明的改進(jìn));
(3) 無(wú)人機(jī)之間不會(huì)發(fā)生碰撞;
(4) 牽制節(jié)點(diǎn)位置會(huì)趨向虛擬領(lǐng)航者位置()(對(duì)文獻(xiàn)[26]位置結(jié)論的拓展)。
3 牽制點(diǎn)對(duì)系統(tǒng)特征值的影響
通過(guò)分析蘊(yùn)含圖的結(jié)構(gòu)特性的Laplace矩陣的特征值,尤其是,其大小直接反映了圖連通性、魯棒性甚至集群分布協(xié)同控制的收斂性。通過(guò)施加牽制控制,進(jìn)一步地將Laplace矩陣變?yōu)樵鰪VLaplace矩陣,如式(13)所示。通過(guò)估計(jì)的特征值的大致范圍以及牽制控制造成特征值的變化趨勢(shì),可以初步得到牽制控制對(duì)系統(tǒng)的收斂性影響。
3.1 特征值分析


(14)


(15)

(16)


(17)

(18)

(19)
由于≠,即無(wú)人機(jī)之間不重疊時(shí),有
(20)
故可將()視為常值小擾動(dòng)。


可得

(21)
式中:=1,2, …,。


(22)
(23)

圖2 μ對(duì)根軌跡實(shí)部的影響Fig.2 Effect of μ on the real part of the root locus
使用Matlab Symbolic Math Toolbox計(jì)算得:

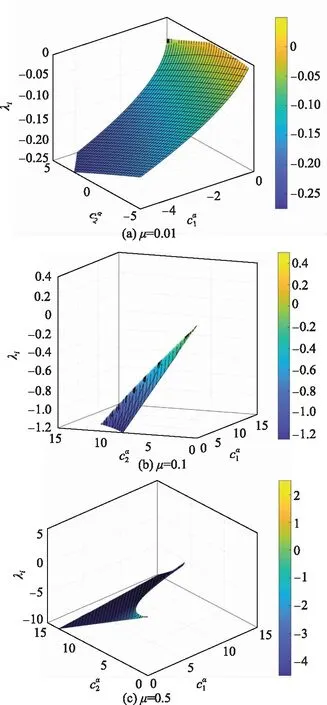
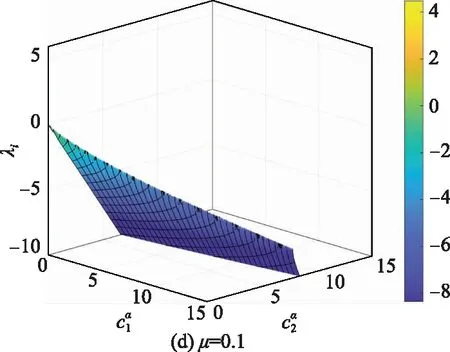
圖3 λi與μ,,之間的關(guān)系Fig.3 Relationship between λi and μ,,
對(duì)于強(qiáng)連通網(wǎng)絡(luò),每增加一個(gè)牽制控制節(jié)點(diǎn)或提高控制增益都可以提升系統(tǒng)的可控性。
在文獻(xiàn)[27]中提出一種基于左Perron向量的控制策略,但需要反復(fù)迭代計(jì)算+k的特征值和特征向量,由于特征值求解計(jì)算量大,實(shí)際工程中比較困難。可使用特征值攝動(dòng)的方法對(duì)最優(yōu)牽制點(diǎn)進(jìn)行近似求解。
對(duì)于一階一致性問(wèn)題,當(dāng)不施加牽制控制時(shí),由于Laplace的最小特征值為0,導(dǎo)致無(wú)人機(jī)集群最終收斂的平衡態(tài)不一定為0,取決于無(wú)人機(jī)集群初始狀態(tài)的平均值,其第二小的特征值決定一致性收斂速度。當(dāng)施加牽制控制后,由于系統(tǒng)最小特征值小于零,平衡態(tài)最終收斂至牽制點(diǎn)的狀態(tài)。
3.2 最小特征值范圍估計(jì)
分析最小特征值的范圍有助于直觀了解系統(tǒng)的可控性以及動(dòng)態(tài)性能,接下來(lái)用矩陣最小特征值相關(guān)結(jié)論對(duì)的最小特征值進(jìn)行估計(jì)。
首先介紹以下矩陣定義。
()為的最小特征值。
矩陣:非對(duì)角元素均為非正數(shù)的實(shí)數(shù)方陣。={=()∈×:≤0 if≠,(,=1,…,)}。
矩陣:如果非奇異矩陣∈,且的所有特征值均為正,則矩陣稱為矩陣。
由引理1得,為正定陣,則為矩陣,∈。
估計(jì)矩陣的最小特征值的范圍是矩陣?yán)碚撝幸粋€(gè)重要的課題,目前已有了許多取值范圍日趨精確的研究成果。另外,在實(shí)際應(yīng)用中除了估計(jì)精度外,還需要考慮計(jì)算的可行性和便捷性,根據(jù)文獻(xiàn)[34],()在以下范圍:

(24)
式中:

(25)
由于為L(zhǎng)aplace矩陣,則有()=0,()=max()。
0<()≤min(max(),min())
令=()∈,=(),可得

(26)
4 仿 真

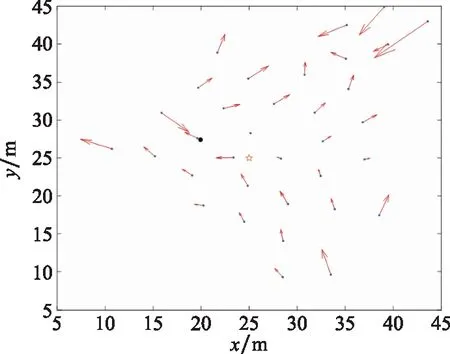
圖4 無(wú)人機(jī)集群初始狀態(tài)Fig.4 Initial state of unmanned aerial vehicle swarm
將整個(gè)無(wú)人機(jī)集群系統(tǒng)視為一個(gè)整體進(jìn)行分析,定義集群中心(center of mass, CoM)的位置與速度為所有無(wú)人機(jī)的位置和速度的平均值:

(27)
定義CoM與虛擬領(lǐng)導(dǎo)者的跟蹤誤差為
(28)
定義多智能整體速度跟蹤誤差為

(29)
定義歸一化的平均速度為
(30)
無(wú)人機(jī)集群運(yùn)動(dòng)軌跡如圖5所示,不同時(shí)刻無(wú)人機(jī)集群狀態(tài)如圖6所示,無(wú)人機(jī)集群跟蹤速度誤差、分量收斂情況分別如圖7、圖8所示。無(wú)人機(jī)集群系統(tǒng)歸一化的平均速度誤差收斂如圖9所示。

圖5 無(wú)人機(jī)集群運(yùn)動(dòng)軌跡Fig.5 Trajectory of unmanned aerial vehicle swarm

圖6 不同時(shí)刻無(wú)人機(jī)集群狀態(tài)Fig.6 Unmanned aerial vehicle swarm status at different times
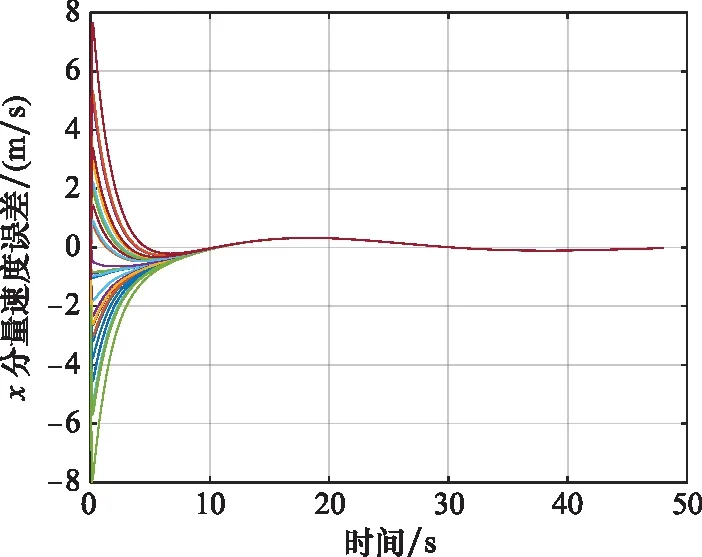
圖7 無(wú)人機(jī)集群跟蹤速度誤差x分量收斂情況Fig.7 Convergence of x-component of unmanned aerial vehicle swarm tracking speed error

圖8 無(wú)人機(jī)集群跟蹤速度誤差y分量收斂情況Fig.8 Convergence of y-component of unmanned aerial vehicle swarm tracking speed error

圖9 無(wú)人機(jī)集群系統(tǒng)總體速度誤差收斂情況Fig.9 Convergence of general velocity error of unmanned aerial vehicle swarm system
從仿真來(lái)看,文中所給出的算法能夠?qū)崿F(xiàn)有效的蜂擁控制。所有的無(wú)人機(jī)速度很快實(shí)現(xiàn)基本一致,并逐漸趨近于虛擬領(lǐng)導(dǎo)者的速度,無(wú)人機(jī)之間的距離隨著時(shí)間的變化逐漸接近于理想距離,并且一直大于0,驗(yàn)證了定理1的正確性。當(dāng)實(shí)現(xiàn)了蜂擁運(yùn)動(dòng)后,無(wú)人機(jī)與虛擬領(lǐng)導(dǎo)者的速度跟蹤誤差將與牽制點(diǎn)的選擇沒(méi)有直接關(guān)系。
5 結(jié) 論
使用牽制控制對(duì)集群蜂擁形成速度的影響是顯著的,本文初步從Laplace特征值的角度分析了牽制控制對(duì)系統(tǒng)的收斂性影響,構(gòu)建了增廣Laplace矩陣,并估計(jì)了系統(tǒng)特征值的范圍。在未來(lái)需要進(jìn)一步定量分析在某一節(jié)點(diǎn)增加牽制控制對(duì)系統(tǒng)特征值以及一致性收斂的影響。結(jié)合任務(wù)需求、無(wú)人機(jī)具體的動(dòng)態(tài)特性以及飛控系統(tǒng)做進(jìn)一步應(yīng)用研究。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
海峽姐妹(2020年9期)2021-01-04 01:35:44
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
VOGUE服飾與美容(2020年9期)2020-09-02 14:47:26
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
山東青年(2016年1期)2016-02-28 14:25:25
當(dāng)代修辭學(xué)(2014年3期)2014-01-21 02:30:44
