基于自適應濾波的高超聲速滑翔目標三維跟蹤算法
2022-02-23 07:49:14張君彪熊家軍蘭旭輝劉文儉席秋實
系統工程與電子技術 2022年2期
張君彪, 熊家軍, 蘭旭輝, 李 凡, 劉文儉, 席秋實
(1. 空軍預警學院研究生大隊, 湖北 武漢 430019; 2. 空軍預警學院四系, 湖北 武漢 430019;3. 中國人民解放軍95980部隊, 湖北 襄陽 441000)
0 引 言
作為一種兼具戰略威懾和戰術打擊能力的新型武器,臨近空間高超聲速飛行器(near space hypersonic vehicle,NSHV)具有飛行高度高、飛行速度快、突防能力強、打擊威脅大等特點,通常飛行于20~100 km的臨近空域,飛行速度大于5 Ma。近年來,以美俄為首的軍事大國加大開展高超聲速飛行器核心技術和攻防體系的研究,逐步邁入工程研制階段,并不斷有印、法、日、英等國家加入NSHV的研制行列。可以預見,未來幾年內,NSHV技術領域的競爭將越發激烈,各國空天安全將面臨新的挑戰,對NSHV的早期預警、穩定跟蹤和防御攔截成為迫切需求。因此,為解決NSHV難以進行三維穩定跟蹤的問題,進一步對其跟蹤技術及理論進行研究尤為必要。
對NSHV跟蹤的問題實質上是利用最新量測信息不斷對系統預測狀態進行修正的過程,主要包括兩個核心內容:機動模型和濾波算法,其中機動模型決定了系統預測狀態的發展趨勢,濾波算法用來修正系統的預測誤差。由于NSHV高機動的特性,采用常規卡爾曼濾波在跟蹤時,易發生精度下降甚至濾波發散的現象。因此,建立符合NSHV運動特性的機動模型和設計更為魯棒的濾波算法是提高NSHV跟蹤精度、實現穩定跟蹤的可行路徑。在機動模型方面,單一的經典機動模型如勻速(constant velocity, CV)模型、勻加速(constant acceleration, CA)模型、當前統計(current statistical, CS)模型、Singer模型、Jerk模型等難以進行穩定有效的跟蹤,系統預測誤差較大。文獻[11]以CS模型為中心,結合CV模型,設計了一種修正變結構交互多模型(interactive multiple model,IMM)算法,使模型切換更為靈活。文獻[12]結合NSHV目標的周期性滑躍特點,對加速度的時間相關性進行建模,設計了一種針對NSHV特性的跟蹤算法。文獻[13]分析了NSHV目標的機動特性,將加速度建模為衰減震蕩自相關的隨機過程,并分析了模型的適應性。在濾波算法方面,以常規卡爾曼濾波算法為基礎,引入漸消因子,從而實時調整過程噪聲協方差,克服濾波發散。文獻[17]分析了造成Kalman濾波發散的原因,并對算法的一步預測值進行了修正,提高了濾波穩定性。文獻[18]對傳統的衰減記憶算法進行了改進,提出了一種可以智能衰減陳舊信息,合理補償當前信息的強跟蹤算法,改善了跟蹤效果。考慮NSHV目標的機動特性,單一的從機動模型或濾波算法的角度出發,實現可靠跟蹤較為困難,不能適應其復雜機動特點。
基于此,本文首先分析了NSHV目標的機動特性,將其三維運動軌跡分解到縱向彈道和橫向彈道,在兩個彈道上分別建立適合其運動特征的跟蹤模型。其次,基于量測噪聲協方差和殘差設定了修正門限,引入多重漸消因子,實時調節各通道的權重,并設計了一種限定記憶長度的指數加權新息協方差估計方法,對陳舊量測信息進行限定記憶,提高新近量測數據的影響。最后通過仿真實驗對算法進行驗證。
1 目標機動特性分析與運動建模
1.1 機動特性分析
NSHV目標的典型機動模式主要有平衡滑翔和跳躍滑翔兩種,其中平衡滑翔是目標飛行過程中在縱向平面內受到的升力與重力和離心力達到平衡時所處的狀態,當其縱向平面受力不滿足平衡條件時,目標會偏離平衡滑翔的加速度,形成跳躍滑翔彈道,其縱向平面的軌跡如圖1所示。在平衡滑翔時目標狀態較為穩定,而在跳躍滑翔時目標的跟蹤相對更為困難,因此,本文主要研究對象為跳躍滑翔NSHV目標。
圖1 NSHV跳躍滑翔軌跡Fig.1 NSHV jump gliding trajectory
攻角和傾側角是NSHV目標的主要控制參量。其中,攻角主要影響目標縱向彈道的機動形式,其設定受飛行走廊的約束,通常采用線性、常值或分段函數進行描述:

(1)
式中:為目標所受升力;為目標質量;為傾側角;為速度傾角;為地心距;為重力加速度。
攻角取值在滿足式(1)的條件下,目標處于平衡滑翔狀態,在其他取值情況下,目標處于跳躍滑翔狀態。而傾側角對橫縱向彈道都有影響,決定了目標橫向彈道的機動形式,其設定同樣受飛行走廊的約束,主要是為了規避探測、機動突防,可以進行類似大C或S型橫向機動。傾側角的設定主要是有利于進攻方進行打擊摧毀,受敵方實際戰場環境的影響較大,但復雜的橫向機動會增大被探測的概率,降低攻擊時效。
1.2 運動學模型構建
基于上述分析,將NSHV目標空間機動彈道分為縱向機動彈道和橫向機動彈道。在縱向彈道上,根據加速度衰減震蕩特性,將其建模為二階時間自相關的零均值隨機過程;在橫向彈道上,其加速度變化相對簡單,采用Singer模型和CA模型進行IMM濾波。最后通過并行濾波和合并處理形成完整的NSHV目標三維跟蹤。
1.2.1 縱向彈道模型
根據NSHV目標縱向方向上加速度的衰減震蕩特性,將加速度建模為二階時間相關函數,即

(2)

該相關函數的功率譜密度為

(3)
式中:為角速率。
令()=[-(-)j][+(+)j],則有

(4)
式中:(j)為白噪聲的傅里葉變換。可得到加速度()的微分方程為:

(5)


(6)
對式(6)進行離散化,則其狀態轉移矩陣為
(7)
式中:
(8)

(9)
其過程噪聲為

(10)
過程噪聲協方差()=E(()()),具體詳見文獻[13]。
122 橫向彈道模型
在橫向彈道上,其加速度變化相對簡單,濾波器采用CA模型和Singer模型。CA模型將加速度建模為白噪聲,其離散化時間狀態方程為
(+1)=()+()
(11)
式中:狀態轉移矩陣為
(12)
協方差矩陣為
(13)
式中:為白噪聲的功率譜密度。
Singer模型由Singer在1970年提出,將加速度建模為具有指數自相關的零均值隨機過程,自相關量為

(14)
加速度微分方程為

(15)
此處為的機動時間常數的倒數,即機動頻率,與縱向彈道運動模型中的含義類似。其離散化時間狀態方程為
(+1)=()+()
(16)
式中:

(17)
其過程噪聲協方差矩陣參見文獻[5]。
2 基于多重漸消因子的自適應卡爾曼濾波方法
根據第1節分析可知,跳躍滑翔NSHV目標的加速度具有震蕩特性,其機動樣式相對靈活多變,單純采用常規卡爾曼濾波算法進行濾波易發生跟蹤精度下降。因此,本文設計了一種基于多重漸消因子的自適應卡爾曼濾波方法,增強濾波算法的自適應跟蹤能力。
設采樣周期為,離散系統的時間狀態方程和量測方程可表示為
()=(-1)(-1)+(-1)(-1)
(18)
()=()()+()
(19)
式中:()和()分別表示目標時刻的狀態向量和量測向量;()表示時刻的狀態轉移矩陣;()表示時刻的量測矩陣;(-1)為時刻的系統噪聲矩陣;()和()分別表示時刻的狀態噪聲和量測噪聲。
典型的離散時間卡爾曼濾波過程可表示為

(20)
(+1)=()()()+()()()
(21)

(22)
(+1)=(+1)(+1)(+1)+(+1)
(23)
(+1)=(+1)(+1)(+1)
(24)

(25)
(+1+1)=(+1)-(+1)(+1)(+1)
(26)
在給定目標狀態向量初始值和估計狀態向量的協方差初始矩陣后,濾波便可以根據最新量測信息進行持續遞推。
一般而言,造成卡爾曼濾波精度下降或發散的原因主要有3種:一是建立的目標機動模型不準確;二是目標運動狀態發生突變;三是濾波迭代過程中估計誤差的傳遞。對卡爾曼濾波進行修正的本質就是利用最新量測值對預測值進行修正,減小估計誤差。而當預測值偏離實際值較大時,增大修正的比重,防止濾波發散,這就是傳統漸消卡爾曼濾波的基本思路。但是這種修正實際上依賴量測值的準確性,也就是當量測值本身誤差非常大時,這種修正的意義非常有限。同時,傳統漸消卡爾曼濾波的單一漸消因子在處理多通道濾波時,對各通道的調節能力相同,導致濾波精度降低。因此,本文設計了一種多重漸消因子的自適應卡爾曼濾波方法,能自適應調節各通道的過程噪聲協方差權重,并設定了發散程度判斷門限,降低量測誤差的影響,提高濾波器整體性能。
2.1 修正門限值的設定

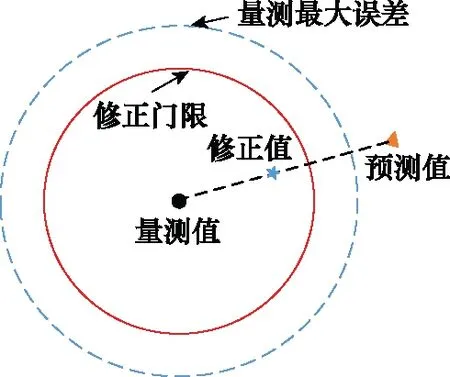
圖2 預測值的修正Fig.2 Correction of predicted value
2.2 多重漸消因子的選取
式(21)中如果引入標量漸消因子,則可表示為
(+1)=()()()()+()()()
(27)
式中:()≥1,則標準卡爾曼濾波將變為單漸消因子卡爾曼濾波。
標量漸消因子的確定方法為
(28)


(29)
式中:為滑動窗口長度。
從式(27)~式(29)可以看出,當處理多通道濾波時,單漸消因子()對各通道濾波的調節能力相同。為避免這種缺陷,本文引入多重漸消因子(),能根據各通道的實際濾波情況對各通道進行實時調節。
()=diag{,,…,,…,}
(30)
式中:為狀態向量維數;()表示第維狀態向量對應的漸消因子。
(+1)=()()()()+()()()
(31)
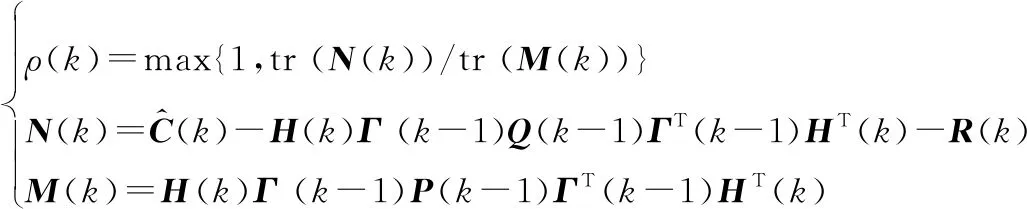
定義矩陣()=(-1)(-1)(-1),則有()=()()()。而量測矩陣()中的元素通常為0或1兩種取值,故由()()=(),可得出多重漸消因子的計算方式為:
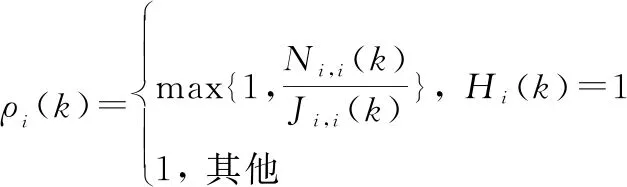
(32)
式中:()表示時刻量測矩陣中的第個元素。

2.3 新息序列協方差的估計
設限定新息協方差序列的記憶長度為(≤),加權系數為(),在時刻應滿足
(33)
式中:為遺忘因子,通常取值范圍為07~095。確定遺忘因子后,根據數列性質,有:
(34)
(35)

(36)

(37)
由式(37)可得出,新息協方差估計值的大小依賴于記憶長度和遺忘因子的取值,其中和取值的選取主要取決于系統狀態的變化劇烈程度,對于變化越平緩的系統,記憶長度的取值應越大,遺忘因子的取值同樣也應越大,以此得到更準確的新息協方差估計值。
3 仿真實驗
3.1 觀測方程的建立
在跟蹤過程中,雷達量測數據通常在球坐標系下建立,而卡爾曼濾波器在笛卡爾坐標系中工作。為解決這一問題,本文采用修正無偏量測轉換將球坐標系下的量測數據轉換到笛卡爾坐標系中,得到其轉換后的量測值為
(38)


(39)
式中:為對稱矩陣,修正無偏量測轉換后內各元素為

(40)

3.2 仿真場景設置
參考美國官方公布的CAV-H飛行試驗,設置如下仿真場景:高超聲速滑翔飛行器目標由發射器助推到50 km高度并釋放后進行滑翔,其再入速度為15 Ma,攻角和傾側角模式如圖3所示。
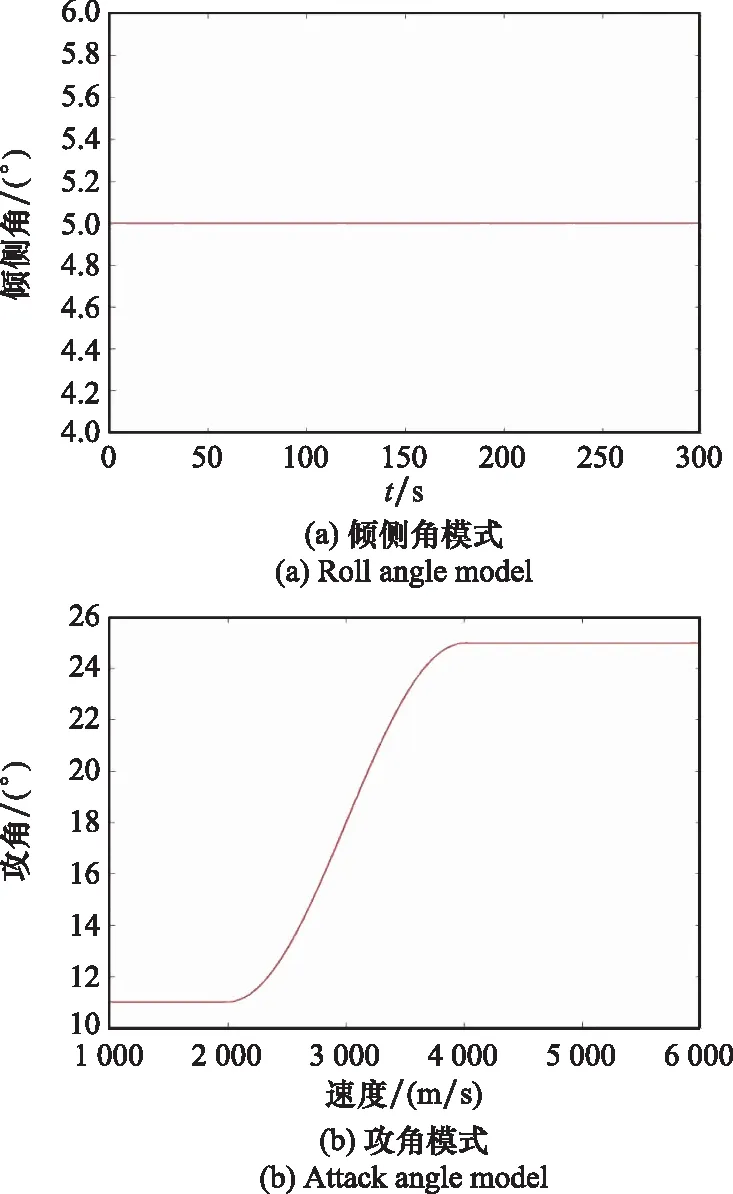
圖3 控制模式Fig.3 Control model
攻角模式表達式為
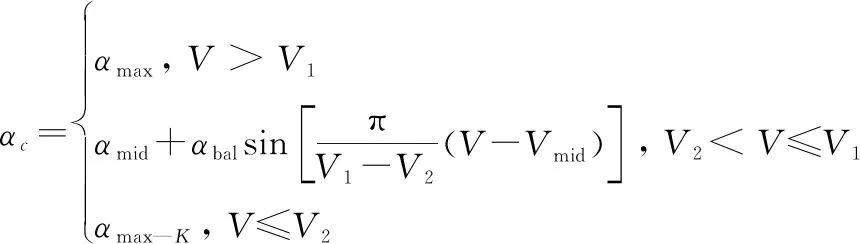
(41)
式中:=(+)2;=(+max—)2;=(-max—)2;=25°;max_=11°;=4 000 m/s;=2 000 m/s。
假定觀測雷達地理坐標為[12°, 1.5°, 1 km],采樣間隔為0.1 s,距離誤差為100 m,俯仰角和方位角誤差均為0.1°,雷達觀測過程中無地面遮擋,目標與雷達距離約為300 km。
為驗證本文算法性能,設置兩個仿真實驗,實驗1主要驗證本文算法相對其他算法跟蹤NSHV目標時的精度,實驗2主要驗證本文算法在不同量測參數下的跟蹤穩定性。
3.2.1 仿真實驗1
(1) CA+CV+CS的IMM濾波算法:機動頻率為1/20,最大加速度=10g,模型先驗概率=[01,08,01];
(2)文獻[12]所提跟蹤算法:角速率=005;
(3)本文運動模型:機動震蕩頻率=006 rad/s,最大相關衰減量=1300。
蒙特卡羅次數為100,得到各模型對應的位置均方根誤差(root mean squre errer, RMSE)如圖4所示,速度估計和速度RMSE分別如圖5和圖6所示。
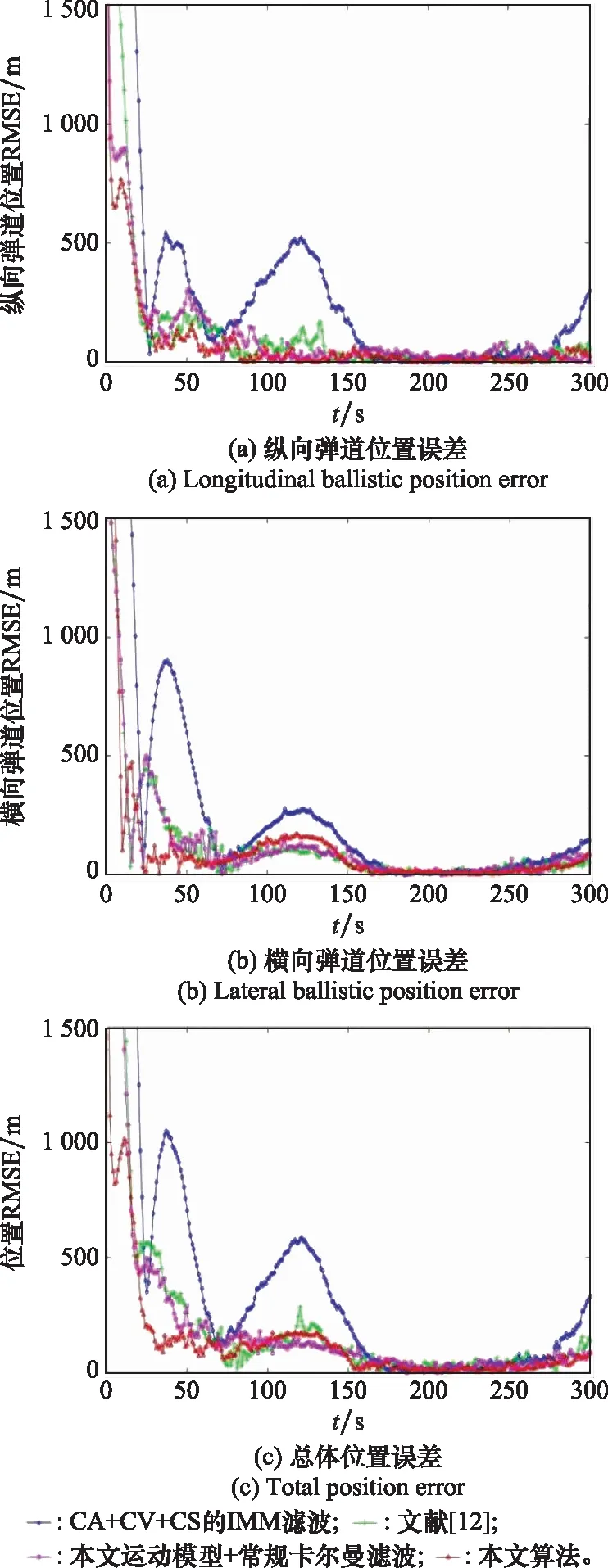
圖4 位置誤差Fig.4 Position error
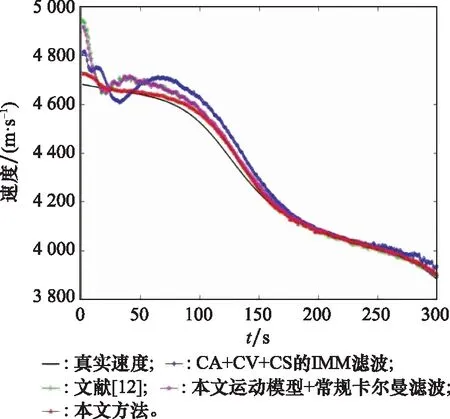
圖5 速度估計Fig.5 Velocity estimation
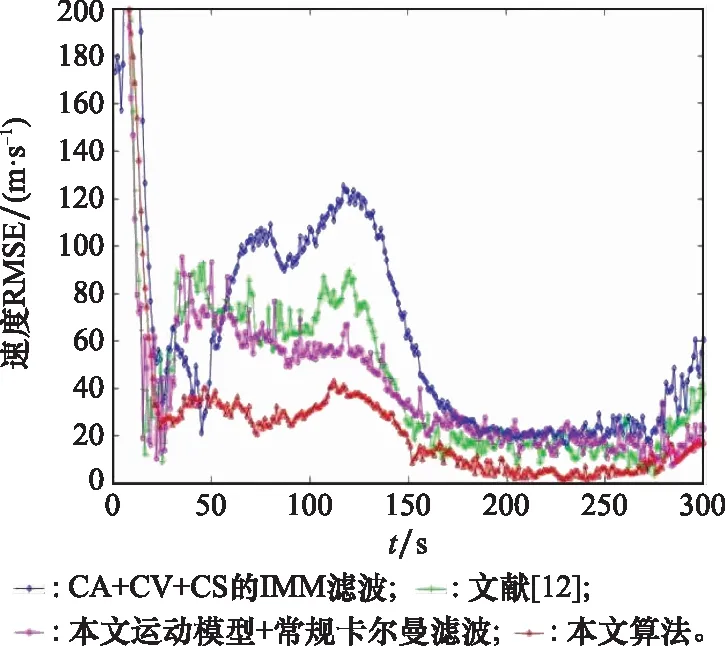
圖6 速度誤差Fig.6 Velocity error
從位置跟蹤誤差可以看出,由于CA+CV+CS的IMM濾波算法對目標運動模式建模不夠準確,在50~150 s的時間區間,其縱向和橫向彈道跟蹤誤差都存在明顯起伏,且收斂速度較慢。文獻[12]提出的跟蹤算法在跟蹤類周期運動目標時能保持較好的性能,能快速收斂并保持較為穩定的跟蹤效果,沒有明顯劇烈的誤差起伏,但由于NSHV機動并不是嚴格周期性運動,所以其總體跟蹤誤差較本文運動模型稍差。本文提出的運動模型能較準確地描述NSHV的運動模式,所以其跟蹤效果較好,但由于常規卡爾曼濾波器對誤差的修正有限,所以在0~80 s的跟蹤階段,其收斂速度要遜于本文算法。
從速度誤差來看,本文算法收斂速度最快,且整體較為平穩,精度最高。由于NSHV目標的機動特性,CA+CV+CS的IMM濾波算法速度跟蹤誤差起伏最大,其他2種算法整體差別不明顯,本文運動模型的常規卡爾曼濾波算法估計誤差精度略優。
這里需要說明的是,從圖4和圖6中可以看出,在進行到280 s以后,所有算法的誤差都有所增加,導致這一現象的主要有兩個可能原因:第一,從圖5可以看出,280 s以后速度下降至4 000 m/s以下。根據圖3(b)飛行器控制模式中攻角模式的設定可知,速度下降至4 000 m/s以下會引起攻角的變化,攻角的變化帶來飛行器的機動變化,由此會造成跟蹤模型跟蹤誤差增大。因此,280 s以后所有算法的誤差都有所增加可能是由于飛行器機動造成的;第二,隨著目標的機動,目標與雷達距離越來越遠,量測值誤差有所增加,對跟蹤模型的修正效果減弱,引起跟蹤誤差上升。
位置與速度誤差統計平均如表1所示。
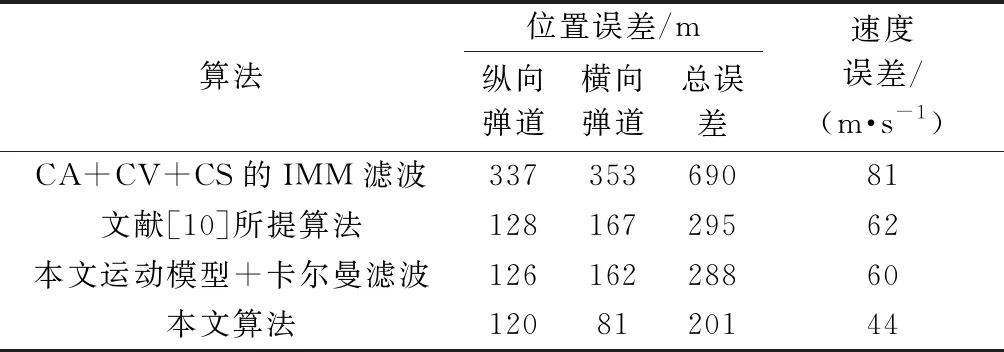
表1 目標位置與速度跟蹤誤差統計平均
3.2.2 仿真實驗2
為檢驗本文算法在不同量測參數下的跟蹤性能,在保持其他各種仿真條件不變的情況下,設置了如表2所示的幾種不同量測參數。
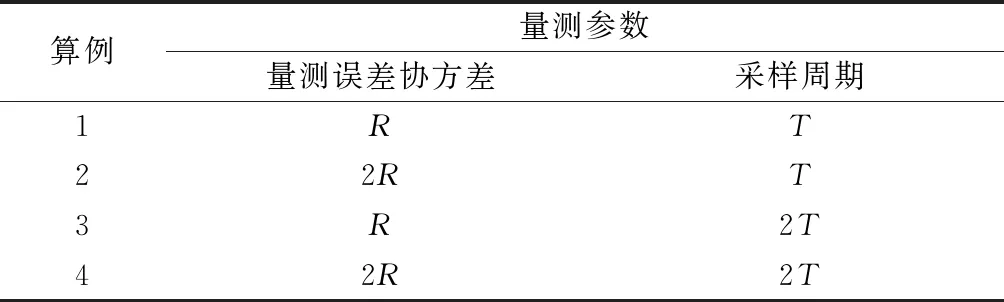
表2 量測參數設置
經過仿真實驗分析,可得到不同濾波器參數下,本文算法的位置和速度跟蹤誤差如表3所示。
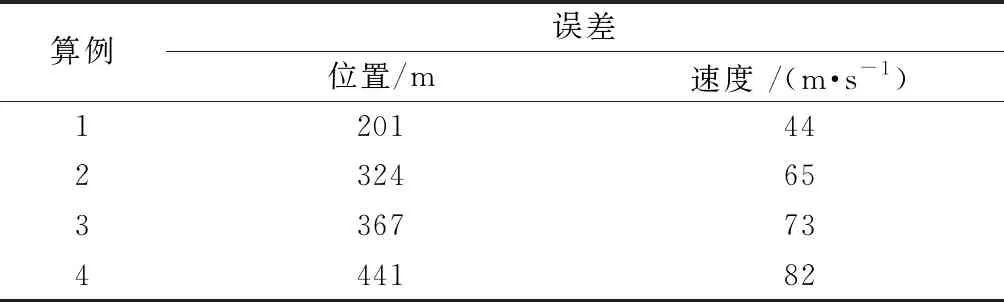
表3 不同濾波器參數下的誤差比較
從表3可以看出,量測誤差協方差增大1倍后,算法的位置估計誤差和速度估計誤差分別增大61%、48%,采樣周期增大1倍后,算法的位置估計誤差和速度估計誤差分別增大83%、66%,量測誤差協方差和采樣周期同時增大1倍后,算法的位置估計誤差和速度估計誤差分別增大119%、86%。這是因為采樣周期增大后,跟蹤會變得“遲鈍”,收斂速度變慢,導致誤差上升;量測誤差協方差增大后,導致量測值對預測值修正變弱,收斂速度變慢,跟蹤誤差上升。但總體上,本文算法在不同量測參數下保持了較為穩定的跟蹤性能,能較好適應濾波器的參數變化。
3.3 仿真結果與分析
第3.2節所述仿真實驗可以表明:
(1) 對于NSHV目標的跟蹤,不同跟蹤模型在其機動樣式穩定時,都能保持較小的誤差并進行穩定跟蹤,但當NSHV目標機動樣式發生改變時,由于跟蹤模型失配,不能反映目標真實運動狀態,CA+CV+CS的IMM濾波算法、文獻[12]所提的跟蹤算法、基于本文運動模型的常規卡爾曼濾波算法都會發生明顯的誤差上升,而本文算法則可以根據濾波發散情況對漸消因子進行實時調整,利用最新量測值對預測值進行修正,所以跟蹤效果要優于常規卡爾曼濾波,且濾波收斂后依然能保持穩定的濾波性能。
(2) 由于跟蹤性能的優劣與量測參數直接相關,從仿真實驗2可以看出,本文算法在不同的量測參數下,濾波性能有所差異,但總體還是保持了較為穩定的跟蹤,沒有發生明顯的濾波發散,說明本文算法具有一定的“抗干擾能力”,穩定性較好。
4 結 論
針對NSHV目標跳躍滑翔的機動特性,本文將其三維運動軌跡分解到縱向彈道和橫向彈道,在兩個彈道分別建立適合其運動特征的跟蹤模型,并針對常規卡爾曼濾波在跟蹤誤差較大時易發生精度下降的現象,構建了多重漸消因子的自適應卡爾曼濾波,提高了收斂速度和跟蹤精度,并與常用的幾類跟蹤模型進行了仿真對比,結果表明本文算法在跟蹤NSHV目標時精度和穩定性均較高。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
測控技術(2018年12期)2018-11-25 09:37:34
北京航空航天大學學報(2017年9期)2017-12-18 07:12:25
光學精密工程(2016年6期)2016-11-07 09:07:19
電源技術(2016年9期)2016-02-27 09:05:39
核科學與工程(2015年4期)2015-09-26 11:59:03
電源技術(2015年1期)2015-08-22 11:16:28
電測與儀表(2015年24期)2015-04-09 12:04:36
