基于YUSENSE MAP高效預處理無人機高空間分辨率多光譜影像
2022-02-27 10:10:01尹寶田
新農業 2022年2期
關鍵詞:無人機
摘要:本項目以沈陽市周邊受蟲害影響的林地作為研究對象。為了能夠實現高精度監測林地中小圖塊受蟲害影響的面積,采用飛圖橫空6A復合翼無人機作為飛行平臺,MS600多光譜傳感器作為載體,獲取研究區優于20厘米空間分辨率的多光譜影像。空間分辨率越高,影像越大,數據處理效率就越低。本項目采用Yusense Map軟件經過生成配置參數、配準、拼接、定標等幾個步驟可高效的得到研究區具有真實地面反射率的多光譜影像。
關鍵詞:Yusense Map;多光譜;無人機
森林不僅具有重要的環境屬性,而且還具有重要的資源屬性。林地健康的破壞一方面受人為影響,尤其是當前物流行業的不斷擴大。另一方面現代化工業規模不斷擴大也導致污染程度逐漸提高。松材線蟲病嚴重影響著我國的林地健康、生態安全和社會安全,必須對其進行科學的監測,時刻掌握林地的健康狀況,及時制定有效機制。遙感數據的質量直接影響著后期數據的準確性,經過不斷的探索與實驗,從結果中逆向推理出采用Yusense? Map軟件處理MS600無人機高空間分辨率多光譜數據效率高、結果真實可靠。
MS600型通用多光譜相機可實現最多6個通道光譜圖像數據的同步獲取,本案例選用藍、綠、紅、紅邊、以及2個近紅外波段共6個通道。該型傳感器包括相機主機、下行光傳感器(以下簡稱“DLS”)、GPS模塊。主機主要實現相機工作模式和參數的配置,光譜圖像數據的獲取和存儲;DLS主要在飛行過程中同步測量相機6個通道對應的環境光,并記錄在獲取圖像的元數據中,可用于校正飛行過程中出現少量云層對光線的短暫遮擋,減小對圖像數據獲取的影響;GPS模塊主要為相機提供地理坐標信息,并也同時記錄在獲取圖像的元數據中。
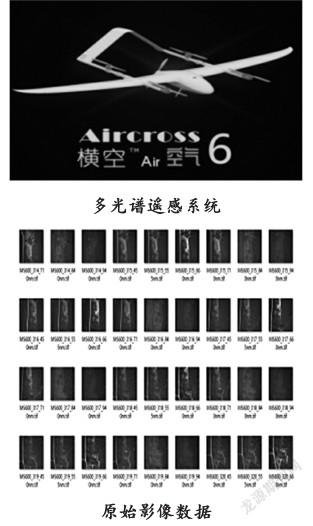
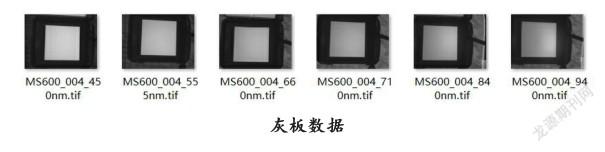
多次實驗證明為了使用 MS600通用多光譜相機更加有效精確的采集多光譜圖像數據,當規劃航線觸發發射時,確保相機“MS600”字樣與飛行方向保持一致,DLS模塊、GPS模塊的箭頭所指方向與飛行方向保持一致;飛行前保證鏡頭窗口清潔;GPS模塊接收信號質量良好;航向和旁向重疊度不低于75%;至少有1條航線超出規劃飛行采集區域的邊緣,確保邊緣數據有效;確保相機視軸天頂10°范圍內變化,并垂直地面;每次飛行前后立即通過灰板進行標定。本案例是在晴朗的天氣條件下,采用飛圖橫空6A復合翼無人機作為飛行平臺掛載MS600多光譜傳感器獲取沈陽市周邊具有蟲害影響的有代表性數據,研究區面積1500畝,共獲取影像10752張。
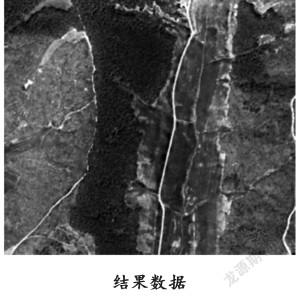
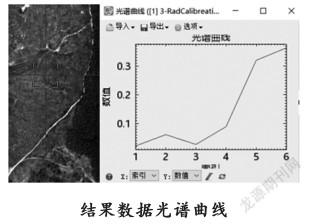
通過影像內置GPS新建工程,選擇5~10張具有代表性圖像,在相機參數設置中實現空中三角測量、自動轉點等工作最終輸出虛擬相機參數。通過生成的虛擬相機參數將所有影像完成影像內定向、波段配準,該過程無需人工干預,最終成果是同一影像的6個波段將會被配準。通過空中三角測量、概略DSM、單片正射影像、鑲嵌正射影像完成影像拼接,最終拼接成一張圖。最后通過輻射定標完成標定工作,得到研究區具有真實地面反射率的遙感影像。
飛圖橫空6多光譜遙感系統航時長,數據獲取效率高;MS600型通用多光譜相機可實現最多6個通道光譜圖像數據的同步獲取,可滿足多行業應用;下行光傳感器可用于校正飛行過程中出現少量云層對光線的短暫遮擋,減小對圖像數據獲取的影響;Yusense?Map軟件經過生成配置參數、配準、拼接、定標等幾個步驟可高效的得到研究區具有真實地面反射率的多光譜影像;當應用場景最大高差超過航高20%的農田、鄉村、河道、丘陵等地區低空遙感,拼接結果會出現扭曲變形或漏片的現象,可通過編輯點云、編輯DEM、影像修剪進行修復。
立項單位:遼寧生態工程職業學院教科研部。
主持人:尹寶田。
課題《無人機高空間分辨率多光譜遙感森林病蟲害監測分析應用研究》的階段性成果。
猜你喜歡
電腦知識與技術(2016年28期)2016-12-21 12:21:32
電子技術與軟件工程(2016年19期)2016-12-19 18:28:28
新教育時代·教師版(2016年27期)2016-12-06 18:14:59
中國科技縱橫(2016年17期)2016-11-30 11:51:57
農機使用與維修(2016年10期)2016-11-10 09:45:55
人間(2016年26期)2016-11-03 17:52:40
中國科技博覽(2016年22期)2016-11-01 18:10:31
科技視界(2016年22期)2016-10-18 14:30:27
企業導報(2016年9期)2016-05-26 20:58:26