受飽和約束的車輛轉向非線性魯棒模糊分布控制
2022-02-28 12:56:52孫船斌童寶宏
振動與沖擊 2022年4期
關鍵詞:模型
孫船斌, 方 琳, 童寶宏,2
(1.安徽工業大學 機械工程學院, 安徽 馬鞍山 243032;2.安徽工業大學 低碳與智能車輛研究所, 安徽 馬鞍山 243032;3.安徽工業大學 特種重載機器人安徽省重點實驗室, 安徽 馬鞍山 243032)
駕駛員面臨高速行駛的緊急避障,操縱方向盤通常會在短時間達到極限位置,從而使車輛處于急轉向過程,在此期間輪胎力學特性由線性狀態迅速進入飽和非線性狀態,導致車輛轉向出現側滑和側傾失控的危險極限狀態。極限狀態下車輛的橫擺-側傾運動是強非線性耦合過程,需要協同考慮橫擺-側傾穩定控制,提高非線性擾動下車輛極限工況的穩定安全性。目前研究多單獨針對極限工況下的操縱穩定性或側翻穩定性,對車輛橫擺和側傾穩定性的綜合研究較少。金輝等[1]利用質心側偏角相軌跡進行極限車速穩定性控制。李紹松等[2]對極限工況下主動前輪轉向汽車進行穩定性控制。李道飛等[3]基于最優輪胎力分配對車輛動力學集成控制。
在眾多主動控制策略中,魯棒控制策略對非線性擾動具有很好的控制效果。張家旭等[4]對帶參數攝動的車輛底盤的集成魯棒混合控制研究,將輪胎側偏剛度非線性視為小擾動。胡延平等[5]針對非線性干擾設計了基于輸出反饋的非線性H∞控制,改善線性控制器的控制效果。朱天軍等[6]基于線性矩陣不等式的重型車輛防側翻魯棒控制算法研究,將轉向角作為非線性擾動進行穩定控制。極限狀態下車輛的輪胎力和懸架力處于劇烈變化的非線性狀態,如何在控制過程實時、準確地反映車輛非線性,是本文魯棒控制考慮的一個重要問題。
此外,本文研究主動前輪轉向(active front steering, AFS)和直接橫擺力矩控制(direct yaw-moment control,DYC)的集成控制,綜合考慮了前輪轉向執行限制和輪胎附著極限引起的輸入飽和約束。文獻[7]為提高多輪輪轂電機驅動車輛動力學綜合控制性能,利用趨近率獲取滑模SMC期望控制反饋,將執行分配問題轉換為二次規劃問題進行求解。李靜等[8]研究新的狀態反饋的魯棒L2-L∞/H∞控制方法,在轉向約束和懸架力分配的基礎上,協調主動前輪轉向系統和主動懸架系統的控制輸入。MPC控制能夠處理多約束問題,但復雜的實時矩陣運算會增加硬件成本,而且硬約束無法實時保證系統最優問題可解,文獻[9]利用MPC研究路面附著極限橫向軌跡跟蹤控制,引入松弛變量來弱化安全約束所施加的硬約束。軟約束能提高系統求解可行性,但忽略反饋輸入受飽和約束的影響,可能會引起系統性能惡化,這也是本文控制關注的另一個重要問題。
針對上述問題,本文采用AFS+DYC對極限狀態車輛橫擺側傾穩定性控制。首先利用Takagi-Sugeno(T-S)方法實時逼近極限工況下動態非線性,建立車輛橫擺側傾模型和改進橫擺參考模型。引入輸入約束松弛因子提高執行器利用率,同時考慮反饋輸入受到飽和約束后對控制系統的影響,將其作為有界擾動進行控制。構建T-S框架下主動前輪輸入的動態飽和閾值,采用范數有界的側翻穩定閾作為側傾性能約束,協調AFS和DYC集成控制。基于分布補償結構(parallel distributed compensation,PDC)設計狀態反饋模糊控制器PDC-TS,并將車輛橫擺-側傾非線性魯棒H∞控制轉換為線性矩陣不等式LMIs凸優化問題。最后基于Trucksim-MATLAB/Labview進行控制仿真測試和硬件在環驗證,對比傳統魯棒控制、無控制工況車輛的極限轉向過程,并分析松弛因子對控制過程的影響。
1 車輛Takagi-Sugeno模糊模型
1.1 非線性模型
選取質心較高的中型車輛作為橫擺-側傾控制對象,車輛橫擺-側傾模型如圖1所示。車輛轉向過程前進速度vx不變,假設車身側傾中心在轉向過程中不變。車輛橫擺-側傾耦合運動模型如式(1),fd為車身的側向慣性力矩。極限狀態下橫擺運動過程中,前后輪側偏力是側偏角的非線性函數,忽略兩側轉向差異,輪胎側偏力可以表示為Fyf=Cf(α1)α1,Fyr=Cr(α2)α2,其中Cf(t),Cr(t)為輪胎等效側偏剛度。側傾過程的懸架輸出力是側傾角θ和側傾角速度p的非線性函數,剛度kx(t)、阻尼cx(t)均為時變非線性。文中主要參數如表1所示。
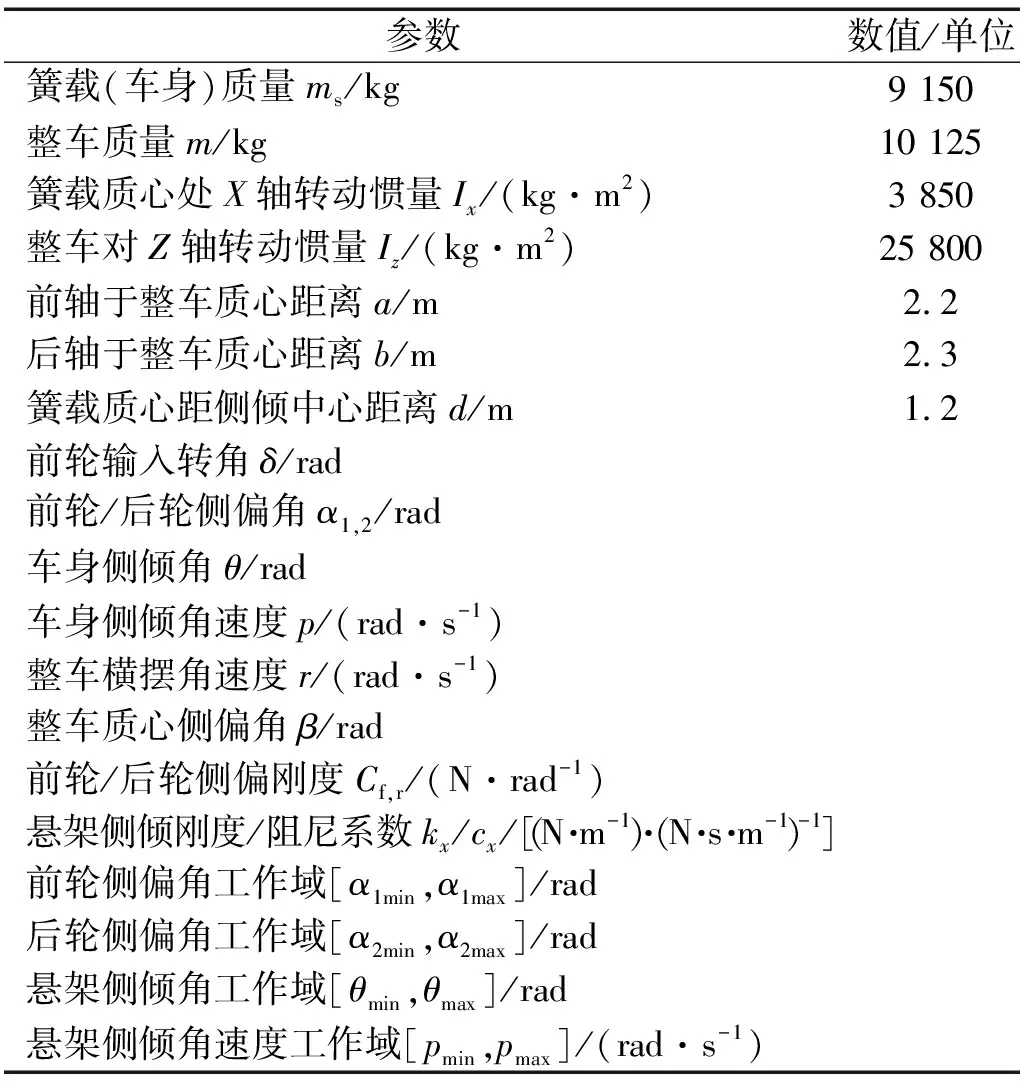
表1 仿真模型主要參數
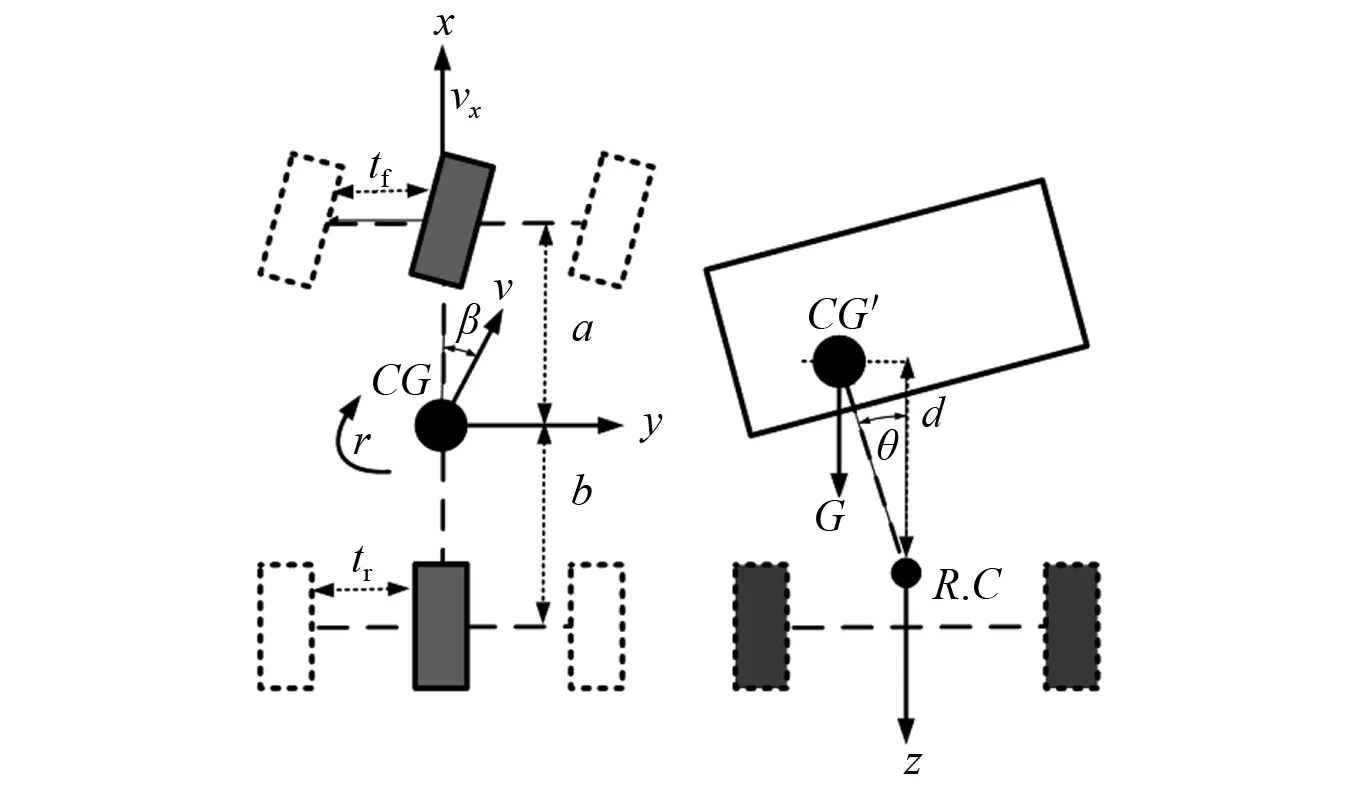
圖1 車輛橫擺-側傾模型Fig.1 Yaw-roll model of vehicle
(1)

(2)
文中控制輸入Uδ為主動前輪轉向角預期增量Δδf產生的附加前輪側偏力。為減輕轉向輪胎操縱負擔,減少制動對縱向車速的影響,本文直接橫擺力矩Mdyc通過制動單側后輪得到[10]。
1.2 動態參數模糊觀測器
在式(1)中,輪胎力和懸架力分別是輪胎側偏角和側傾狀態的非線性函數。在正常穩定行駛過程中,輪胎和懸架均可看作處于線性區域,極限工況會導致車輛狀態往非線性區域變化。需要一個過渡區域,兼顧線性與非線性的平衡,如圖2所示。在此非線性工作域內,輪胎側偏力和懸架輸出力均在扇形域內變化。在此扇形域,輪胎側偏剛度Cf,r、懸架側傾剛度kx和阻尼系數cx均在一定范圍內連續變化。在輪胎力與懸架力的扇形域,可以通過T-S方法逼近非線性車輛模型。
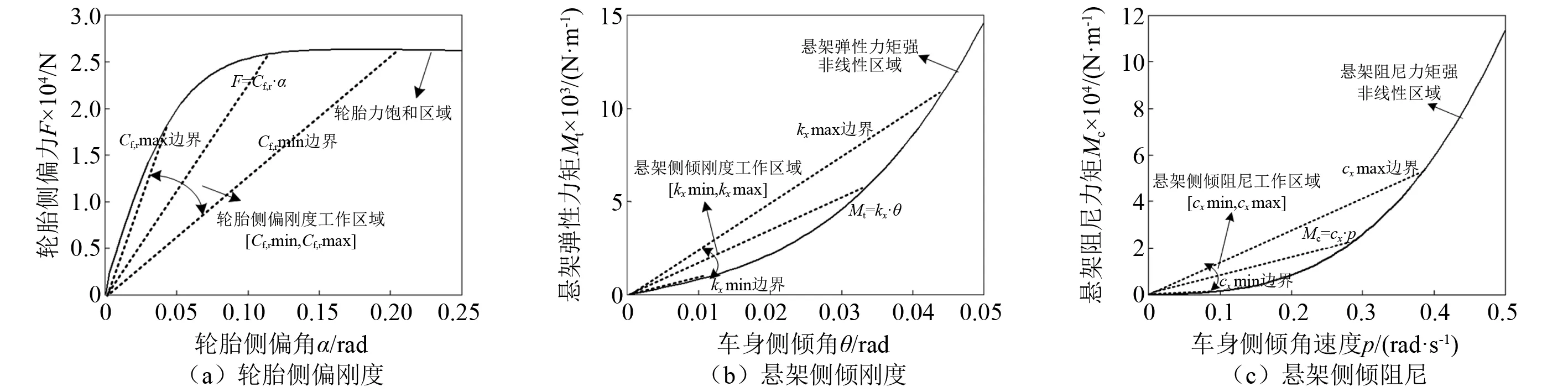
圖2 輪胎與懸架的扇形工作域Fig.2 Sector area of tire and suspension
在扇形工作域內,輪胎側偏剛度隨輪胎側偏角連續變化,懸架側傾剛度和阻尼則隨車身側傾角、角速度連續變化。前后輪胎側偏角由式(3)得到
(3)
將前后輪側偏角、車身側傾角和角速度作為輸入,通過輪胎和懸架模型動態參數的模糊觀測器,實時觀測車輛前后輪的非線性側偏剛度、車身側傾非線性剛度和阻尼。模糊觀測器如圖3所示,其中輪胎與懸架模型參數隨觀測輸入的變化規律并不一致,歸一化處理時區別對待。通過對模糊觀測器參數的調整,能夠盡可能地逼近真實狀態[11-12]。
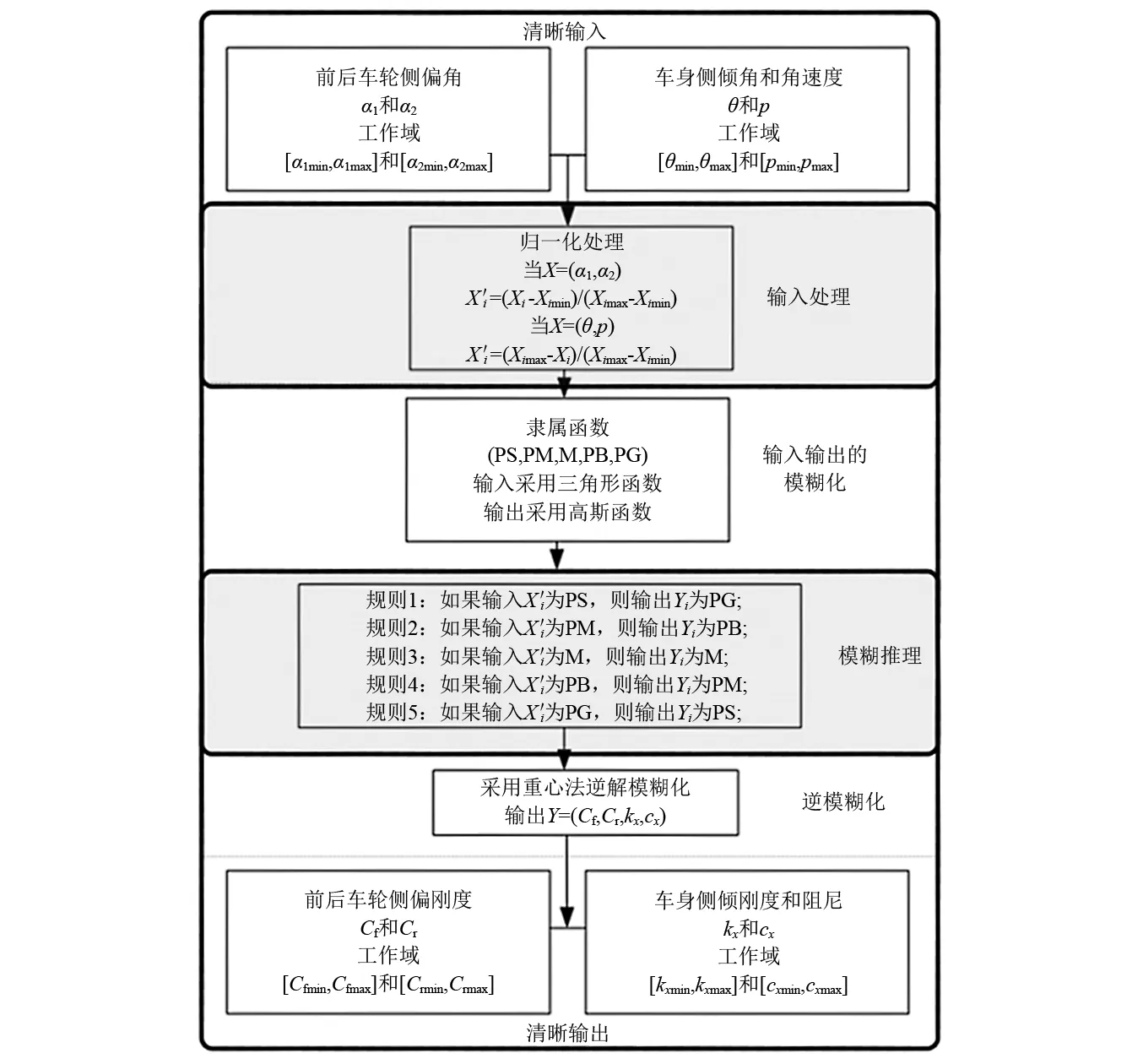
圖3 動態參數模糊觀測器Fig.3 Fuzzy observer for dynamic parameters
1.3 基于模糊觀測的T-S車輛模型
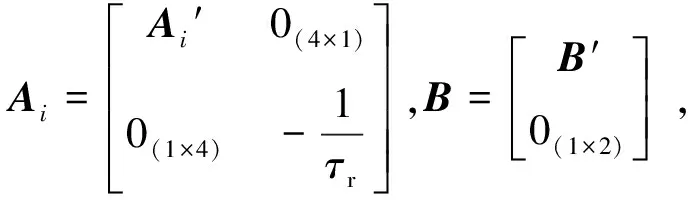
結合圖3動態參數模糊觀測器,利用觀測得到輪胎和懸架的動態模型參數,構建由16個子系統構成的T-S車輛模型如式(4),將前輪轉角δ作為擾動
(4)

(5)
16個線性子系統的車輛模型規則如下:
IFξ=[CfiCrikxicxi] isMi;
具體規則如表2所示,其中PB和PS分別表示大(max)和小(min)。在具體規則編號i,Mi(n)將ξ(n)(n=1,2,3,4)對應的ξ(n)min和ξ(n)max代替矩陣Ai′和Ni′的Cfi,Cri,kxi,cxi。
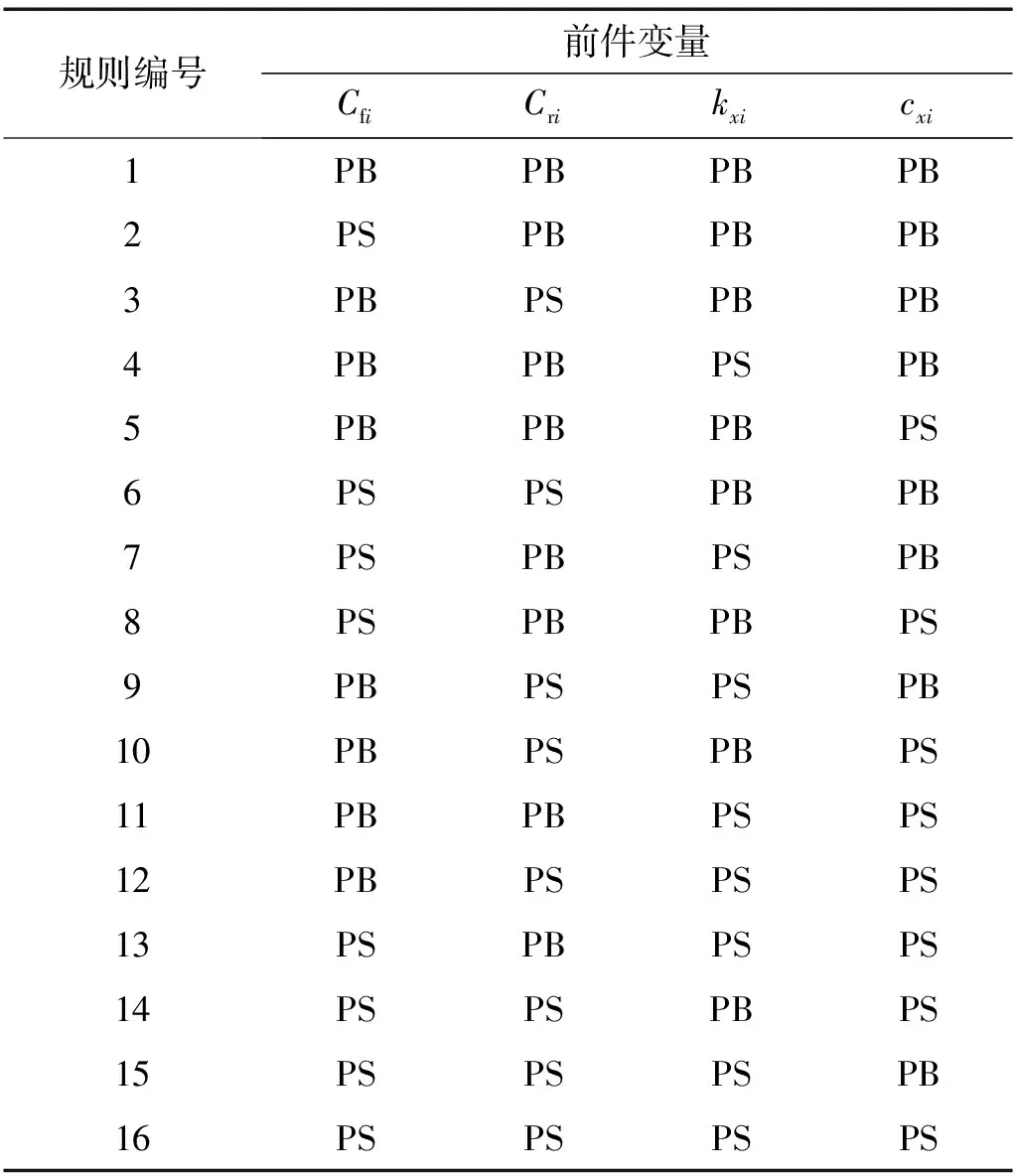
表2 T-S模型模糊規則
式(4)中,結合模糊觀測得到的輪胎側偏剛度Cf,Cr和側傾剛度kx、阻尼cx,實時更新子系統隸屬度hi=G1(Gf)×G2(Cr)×G3(kx)×G4(cx)≥0,且
(6)
模糊規則的隸屬度函數如下
IFMi(n) is PB
IFMi(n) is PS
(7)
2 基于PDC的魯棒模糊控制
2.1 改進期望橫擺運動
各條模糊規則下,輪胎側偏剛度是線性的,根據模糊規則構建T-S框架下車輛橫擺運動在穩態下橫擺角速度rs如式(8)所示
(8)
式(8)反映當前輪胎非線性下的穩態運動,利用動態參數獲取隸屬度h函數逼近真實運動,同時隱含了輪胎側移約束,相比于線性輪胎的橫擺穩態更接近于實際情況。
聯合式(8)和式(9)得到輪胎非線性下的改進理想橫擺運動,引入一階慣性環節ts得到期望橫擺角速度rd狀態方程如式(9)所示
(9)
圖4給出了本文方法改進的期望橫擺運動,可以看出在Sine with Dwell極限轉向輸入下,車輛橫擺穩態運動已經超出側滑極限,相較傳統方法,T-S方法的橫擺參考能夠更準確地表現車輛非線性。
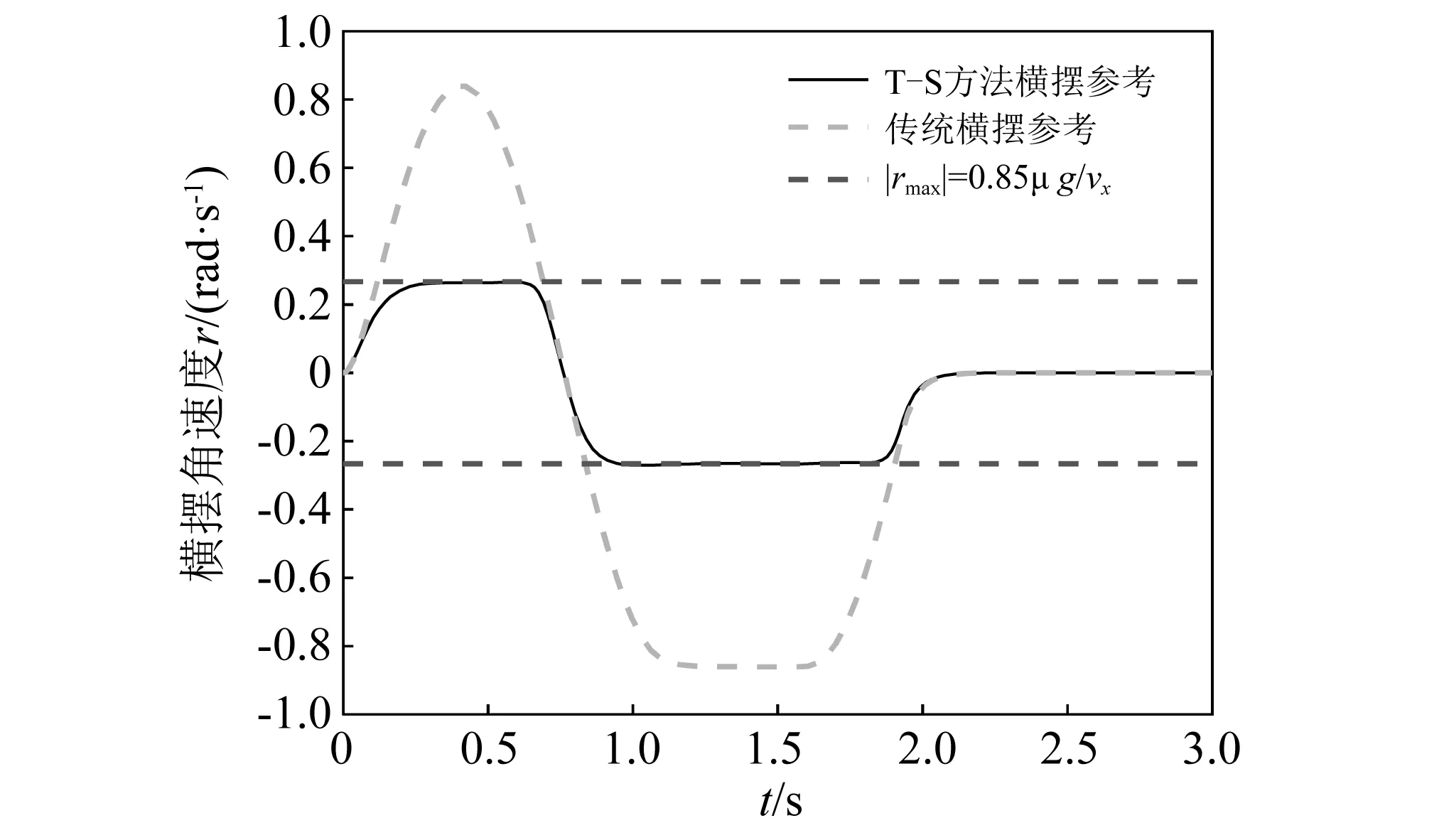
圖4 T-S方法期望橫擺角速度Fig.4 Desired yaw velocity with T-S method
2.2 T-S框架下動態飽和約束控制模型
結合車輛模糊模型式(4)和期望橫擺運動式(9),將期望橫擺運動擴展為系統狀態向量,得到T-S框架下16個子系統構成的車輛控制模型式(10)

(10)
(11)
式(10)中實際控制輸入U滿足飽和約束
(12)

主動前輪轉向不僅受到極限執行限制,還受到輪胎側滑約束。當前輪側偏剛度處于非線性階段,較小的主動前輪轉角變化容易使輪胎趨于飽和,而前輪處于線性階段時,較大的前輪轉角變化仍然允許。為了適應這種情況,預期的前輪轉角增量范圍應隨輪胎側偏剛度變化。引入T-S方法設置主動前輪附加力的動態閾值
(13)

圖5給出了本文前輪轉向附加側向力的閾值,根據前輪側偏剛度的非線性,允許的前輪側向力閾值也在相應變化。隨著車輛進入轉向極限狀態,動態閾值逐漸減小,限制前輪主動轉向產生的側向力Uδ,而由直接橫擺力矩Mdyc作為主要控制輸入。這種協同控制過程隨著車輛狀態變化,相對于傳統固定閾值能夠更好地改善控制效果。
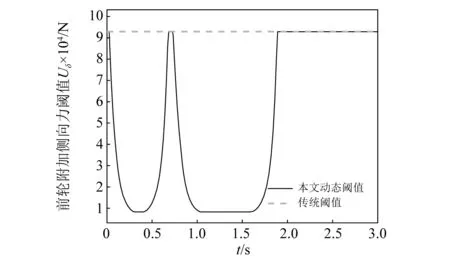
圖5 前輪附加側向力動態閾值Fig.5 Dynamic threshold value of additional lateral force for front wheel


(14)
引用如下不等式[13]用于LMIs推導,‖·‖表示向量或矩陣的2范數
(15)
其中,
(16)
將式(16)引入系統控制式(10),整理得T-S框架下動態飽和約束控制式(17)
(17)
(18)

2.3 PDC-TS模糊分布控制
引入分布式補償控制PDC結構
(19)
式中:Kr為式(17)的狀態反饋增益矩陣;Ki為T-S框架下子系統狀態反饋增益矩陣,將非線性系統式(17)的控制轉化為16個線性子系統反饋增益矩陣的求解,并對子系統隸屬度h實時更新。文中假設狀態X是已知的,實際可由傳感器觀測或者估算得到,不作重點討論。
首先關注緊急轉向時車輛橫擺穩定性,將橫擺運動跟蹤誤差作為橫擺穩定性控制目標
Z1=[βr-rd]T=CX
(20)
此外,極限工況下車輛車身搖擺幅度過大,會降低側傾穩定性,橫向載荷轉移率LTR是評價側傾穩定的常用方法。
Z2=kxθ+cxp=ΦX
(21)

本文通過懸架輸出力矩間接得到輪胎兩側載荷轉移率,并將懸架系統輸出力矩的范數作為側傾穩定性能約束
(22)

在反饋輸入飽和約束式(14)和側傾性能約束式(22)下,閉環系統式(17)的H∞性能可以通過L2增益表示
(23)

當Ki=YiP,對于零初始條件下的閉環系統式(17),在方向盤擾動下存在γ>0,0<τ<1,使系統魯棒控制性能式(23)成立,且滿足動態飽和約束式(14)和側傾穩定約束(22)。其中Yi和P滿足矩陣不等式Ψ,Π,Σ,將在下文推導證明。
至此,將魯棒模糊分布控制器PDC-TS的設計,轉化為LMIs最小值問題,引入引理1用于推導。
引理1對于適當維數的任意矩陣(向量)X和Y,存在任意σ>0,以下不等式成立
XTY+YTX≤σXTX+σ-1YTY
(24)
證明推導如下:


(25)

根據引理1式(24)選擇常數σ>0,結合不等式(15),則

(26)

Ψ1=
(27)
將式(27)左乘diag(P-1,I),右乘它的轉置,等價于式(28)
(28)
式中:Q=P-1;Yr=KrQ;Θ°=QArT+ArQ+(B1Yr)T+B1Yr+σ-1BBT。
應用Schur補引理,將非線性不等式(28)轉換為線性不等式
(29)
結合式(6),將系統反饋增益矩陣Kr的求解,轉化為子系統反饋增益矩陣Ki。式(29)成立,當不等式(30)滿足。
(30)
式中:Θi=QAiT+AiQ+(B1Yi)T+B1Yi+σ-1BBT;Yi=KiQ。
顯然地,當‖ΦiX‖≤ηMd滿足,側傾性能約束式(22)成立。根據文獻[15],存在橢圓集XTPX≤ρ,則Φi(P/ρ)-1ΦiT≤η2MdTMd。式(22)等價于
(31)
式中,Φ°i=ΦiQ。
同理,對于動態飽和約束式(14)
(32)
需要注意的是,當式(32)滿足,反饋輸入動態飽和約束(14)成立,而式(16)和式(17)則保證實際輸入滿足飽和約束式(12)。結合XTPX≤ρ,對于控制向量的2個元素
(33)

綜合式(30)、式(31)和式(33),將閉環系統式(17)的動態飽和約束非線性魯棒控制問題,轉換為凸優化問題:
Minγsubject to LMIsΨandΠandΣ。
線性不等式LMIs通過MATLAB線下求解,得到16個子系統的狀態反饋控制Ui=KiX。結合模糊觀測器在線觀測車輛的非線性輪胎和懸架參數,實時計算隸屬度函數h。結合式(19)獲取PDC-TS反饋輸入Ur=KrX,并根據約束式(12)得到實際控制輸入U。由于子系統控制反饋矩陣并不需要實時計算,在一定程度上降低了控制器硬件性能要求,并提高控制器運行效率。本文魯棒模糊分布控制器PDC-TS的控制流程,如圖6所示。
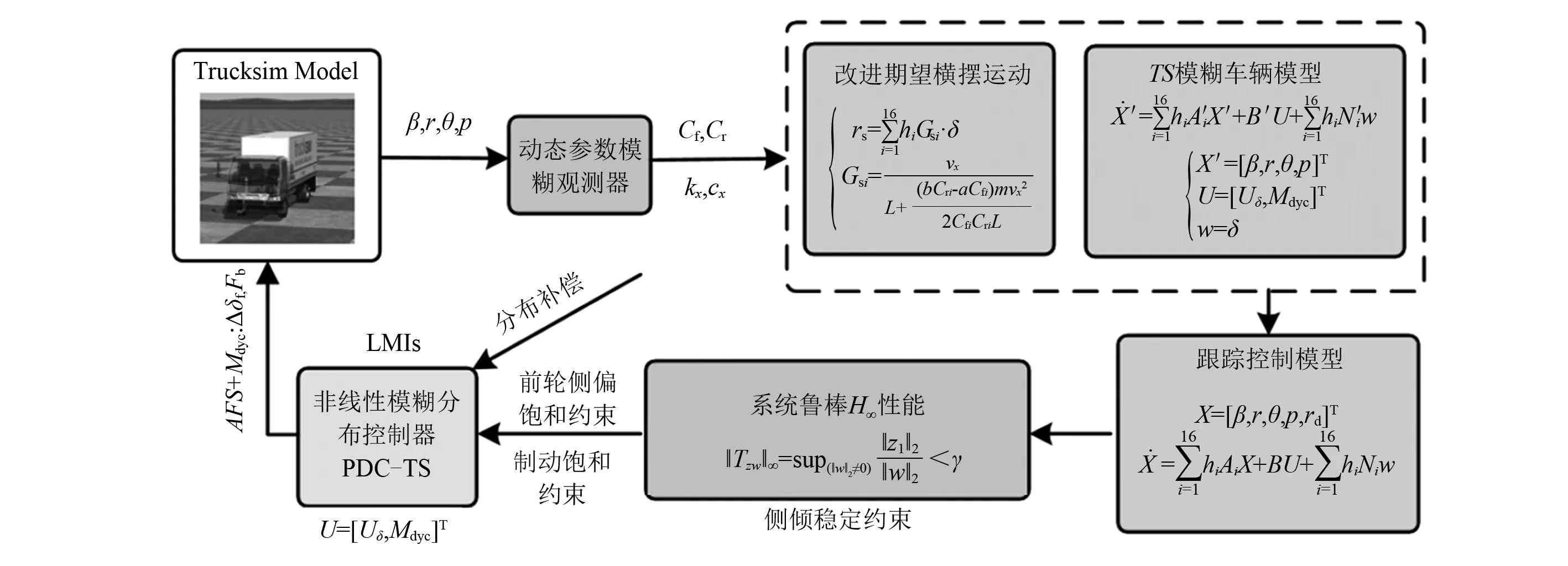
圖6 模糊分布控制PDC-TS控制流程Fig.6 Flow of fuzzy distributed control PDC-TS
3 結果分析
采用Sine with Dwell轉向輸入使車輛達到極限狀態,模擬正常行駛車輛突然避障的實際場景,如圖7所示。前進車速恒定為vx=80 km/h,路面摩擦因數μ=0.8,聯合Trucksim-MATLAB中進行PDC-TS控制仿真。以質心側偏角、橫擺角速度、車身側傾角和橫向載荷轉移率LTR為指標,對比傳統魯棒控制、無控制車輛極限工況穩定性,并分析模糊分布控制PDC-TS松弛因子τ=1和0<τ<1的結果。
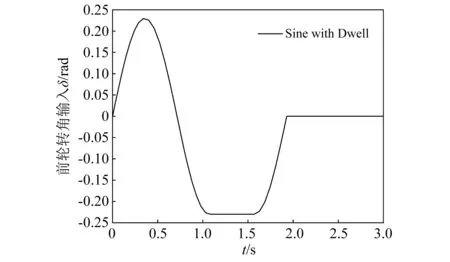
圖7 Sine with Dwell 輸入的前輪轉角Fig.7 Front wheel input of Sine with Dwell
根據式(14),當τ=1時控制反饋輸入受到實際飽和約束,在LMIs中直接忽略包含τ的項,可得到PDC-TS無τ控制的反饋矩陣。傳統魯棒控制模型不考慮輪胎和懸架非線性,根據閾值對狀態反饋控制進行飽和處理,不考慮反饋輸入的飽和偏差,具體反饋矩陣不再推導。仿真測試結果如圖8和圖9所示。
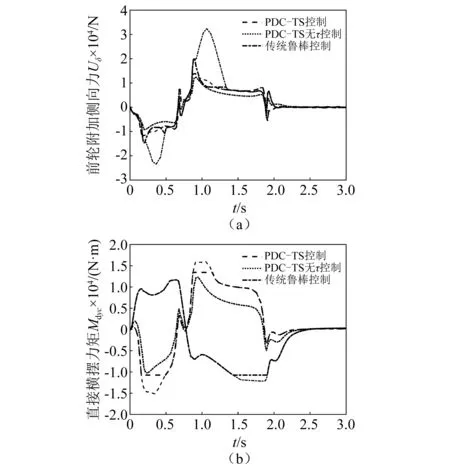
圖9 PDC-TS方法的實際輸入(粗線)和反饋輸入(相同線型細線)Fig.9 Saturation input(thick lines)and feedback input(thin lines in same type)with PDC-TS
根據圖8,無控制車輛轉向過程的運動狀態已經到達極限,質心側偏角、橫擺角速度和車身側傾角已經發散,必須依靠額外輸入控制。對比本文PDC-TS方法和傳統魯棒控制,在極限方向盤擾動下,車輛橫擺側傾狀態均能保持穩定。根據分布控制架構,PDC-TS在各個子系統下線下求解反饋增益矩陣,滿足控制約束和性能約束,最后得到非線性魯棒控制的反饋增益矩陣,在極限狀態下始終使系統保持較好的穩定性能。
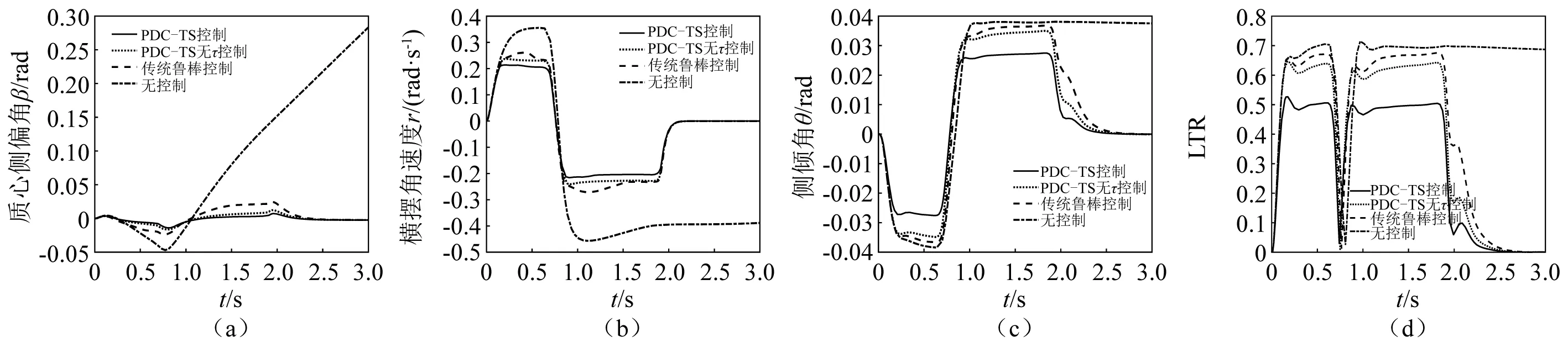
圖8 PDC-TS方法橫擺側傾仿真結果Fig.8 Simulation result of yaw-roll with PDC-TS
從圖8(a)、圖8(b)和圖8(c)可以看出,本文方法下質心側偏角、橫擺角速度和車身側傾角更穩定、幅值更小,收斂速度更快,尤其在轉向極限的差異更加明顯。結合圖4期望橫擺運動的比較,通過實時更新線性子系統的隸屬度h,本文PDC-TS方法能夠更準確地逼近系統非線性。此外,由于對側傾性能指標的約束,本文PDC-TS方法下的橫向載荷轉移率LTR處于較小范圍內,如圖8(d)所示,說明本文方法能有效控制車輛橫擺側傾的綜合穩定性能。
圖9對比了極限轉向過程的控制輸入,結合圖5動態閾值的比較,由于傳統魯棒控制方法忽略輪胎非線性對預期轉角增量的影響,導致主動前輪轉向的附加側向力反饋輸入較大,產生較大的預期橫擺力矩。從而影響直接橫擺力矩反向補償,導致主動轉向和直接橫擺力矩控制效果抵消,降低極限狀態下控制輸入的準確性和有效性。本文PDC-TS方法通過對車輛非線性的準確描述,以及前輪附加側向力動態閾值對子系統反饋控制的約束,改善了前輪附加側向力輸入。當輪胎進入非線性過程,由于動態閾值的約束,前輪附加側向力減小,控制不足部分由直接橫擺力矩補償,提高極限狀態系統控制的準確性。
此外結合圖8和圖9,對比PDC-TS松弛因子τ=1和0<τ<1對控制結果的影響,可以看出,τ=1相當于對反饋輸入施加硬約束,使反饋輸入始終不超出飽和約束,以犧牲橫擺側傾穩定性作為代價。本文控制根據松弛因子0<τ<1,允許反饋輸入在一定范圍內超出限制,提高執行器利用率,并將飽和偏差作為有界擾動進行控制,顯著改善極限狀態下車輛的橫擺側傾穩定性。
4 硬件在環試驗
為進一步驗證本文控制輸入的有效性,基于Trucksim-Labview軟件建立被控車輛模型,結合NI-PXI實時交互上位機和下位控制器及臺架信號,對PDC-TS控制器進行硬件在環仿真測試。下位控制器PDC-TS接收上位機中車輛模型運行狀態,求解得到所需的前輪轉角和輪胎制動力。
根據轉向系統方向盤傳動比及制動系統壓力傳遞函數,硬件在環試驗臺架將下位控制器輸入轉換為方向盤轉角和輪缸制動壓力。由于轉向系統和制動系統實際存在動態執行過程,試驗臺架中的執行控制器采用常見的PID算法跟蹤,該部分非本文研究內容,故不再贅述。硬件在環試驗流程如圖10所示,方向盤轉角和輪缸制動壓力信號分別由轉角傳感和壓力傳感器獲取。
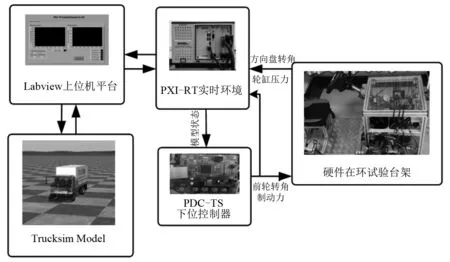
圖10 Trucksim-Labview 硬件在環測試流程Fig.10 Trucksim-Labview hardware in loop
結合T-S車輛模型式(10)和動態模糊觀測器,AFS+DYC的前輪轉角增量和輪胎制動力可表示為
(34)
式中,Fbl和Fbr分別為后軸左、右輪制動力,根據的Mdyc正負號選擇制動側。
硬件在環試驗結果如圖11所示,傳感器采集信號轉化后與期望值進行對比。試驗過程存在動態特性和觀測噪音,除去試驗結果的延遲和抖動,主動前輪轉角增量輸入、左后輪制動力和右后輪制動力的試驗結果與期望值基本一致。硬件在環試驗結果表明,非線性模糊分布控制PDC-TS下AFS+DYC的集成控制輸入是可行的。
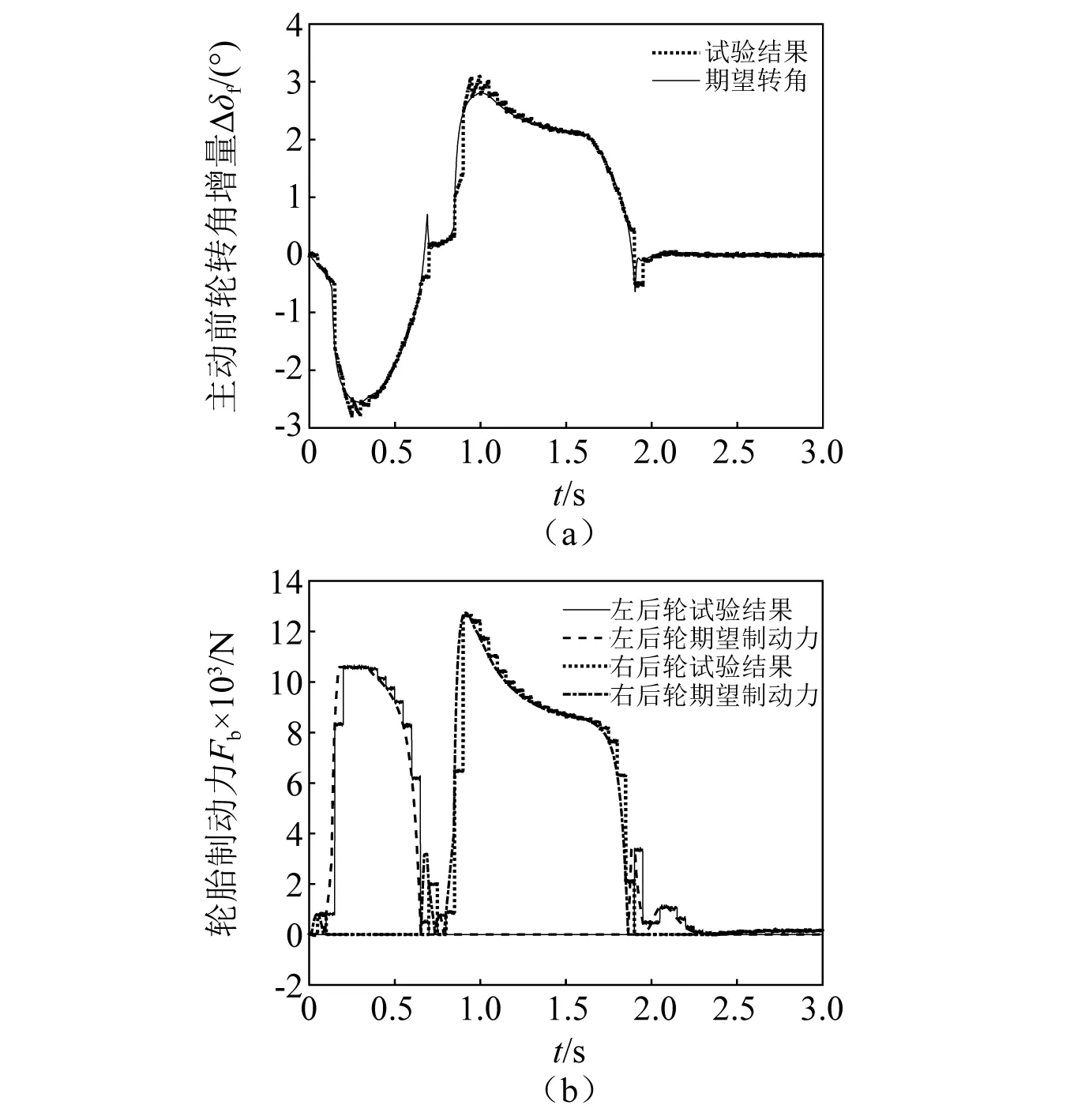
圖11 硬件在環試驗結果Fig.11 Results of hardware in loop
5 結 論
針對極限狀態下車輛轉向非線性和執行器飽和問題,本文研究總結如下:
(1)采用Takagi-Sugeon方法建立車輛3自由度橫擺側傾模型,結合模糊觀測器實時獲取模型動態參數。為準確反映車輛轉向穩態過程,在T-S框架下建立改進橫擺參考模型,相對于傳統橫擺參考模型更加準確。
(2)引入松弛因子提高執行器利用率,將反饋輸入的飽和影響作為有界擾動進行控制。構建T-S框架下主動前輪輸入的動態飽和閾值,能夠改善主動轉向AFS和直接橫擺力矩DYC協調輸出。
(3)基于分布控制方法設計狀態反饋模糊分布控制器PDC-TS,并將車輛橫擺-側傾H∞性能控制轉換為線性矩陣不等式LMIs凸優化問題,最后聯合Trucksim-MATLAB/Labview軟件進行控制仿真和硬件在環試驗驗證。結果表明,對于強非線性的車輛橫擺側傾過程,通過實時更新線性子系統隸屬度,使本文方法控制更加簡潔準確,引入松弛因子充分地利用了執行器工作范圍,并在輸入飽和約束下保持控制穩定性。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
