整車電磁混合主動懸架故障診斷與容錯控制研究
2022-02-28 12:49:42寇發榮武江浩許家楠陳若晨
振動與沖擊 2022年4期
關鍵詞:故障
寇發榮, 武江浩, 許家楠, 陳若晨
(西安科技大學 機械工程學院, 西安 710054)
主動懸架能夠實現對懸架阻尼和剛度的調節,提升車輛的舒適性與操縱穩定性,成為懸架領域的研究熱點[1-3]。但是,對于主動懸架的研究大多數是在各部件完好條件下進行的,主要集中在算法優化、能量回收、特性分析等方面,對其容錯控制的研究比較缺乏[4-6]。當懸架作動器發生故障后,不能提供足夠的作動力,對車輛的安全性造成威脅[7-9]。
容錯控制是指某一懸架作動器發生故障后,通過故障診斷與隔離,判斷哪個作動器發生故障,控制器對該故障作動器進行實時力補償[10-12]。Sun等[13]針對主動懸架作動器故障,提出了一種基于二階滑模控制的容錯控制方法,通過仿真驗證了該方法對懸架故障具有魯棒性,提升了車輛性能。高振剛等[14]在整車模型的基礎上,設計了故障診斷觀測器實現對作動器在線故障估計,得出容錯控制下各作動器的補償阻尼力。姚行艷[15]針對半主動懸架增益故障,提出了基于自適應模糊控制的汽車半主動懸架容錯控制。楊柳青[16]通過魯棒觀測器對懸架故障在線診斷基礎上,設計了基于控制率重組的容錯控制器,消除了作動器故障影響。但目前對懸架容錯控制的研究大多是基于1/4車輛進行的,對整車懸架故障診斷與容錯控制的研究較少。
本文基于電磁混合作動器(electro-magnetic linear hybrid actuator,EMLHA)的主動懸架,設計整車電磁混合主動懸架容錯控制策略。建立整車7自由度模型,采用LQG控制器作為EMLHA懸架的常規控制器。針對懸架的某一作動器發生故障,提出一種主動容錯控制方法。該方法以未知輸入觀測器獲得懸架動撓度殘差,通過邏輯模塊和穩定模塊聯合判定哪一作動器發生故障,對其進行實時力補償,實現容錯控制。最后,開展了仿真分析與臺架試驗,驗證了該容錯控制的有效性與可行性。
1 EMLHA工作原理與故障分析
電磁直線混合作動器(包括直線電機和電磁閥兩部分),如圖1所示。該作動器主要包括上吊耳、永磁體、節流口、電磁閥、活塞、液壓油等。直線電機部分工作在饋能狀態時,車身振動帶動直線電機做切割磁感線運動產生電能,可通過儲能裝置將電能回收。直線電機部分工作在主動狀態時,可以通過調節直線電機的輸入電流,輸出相應的控制力。電磁閥部分工作時,可以通過調節節流口的開度實現阻尼力的調節。
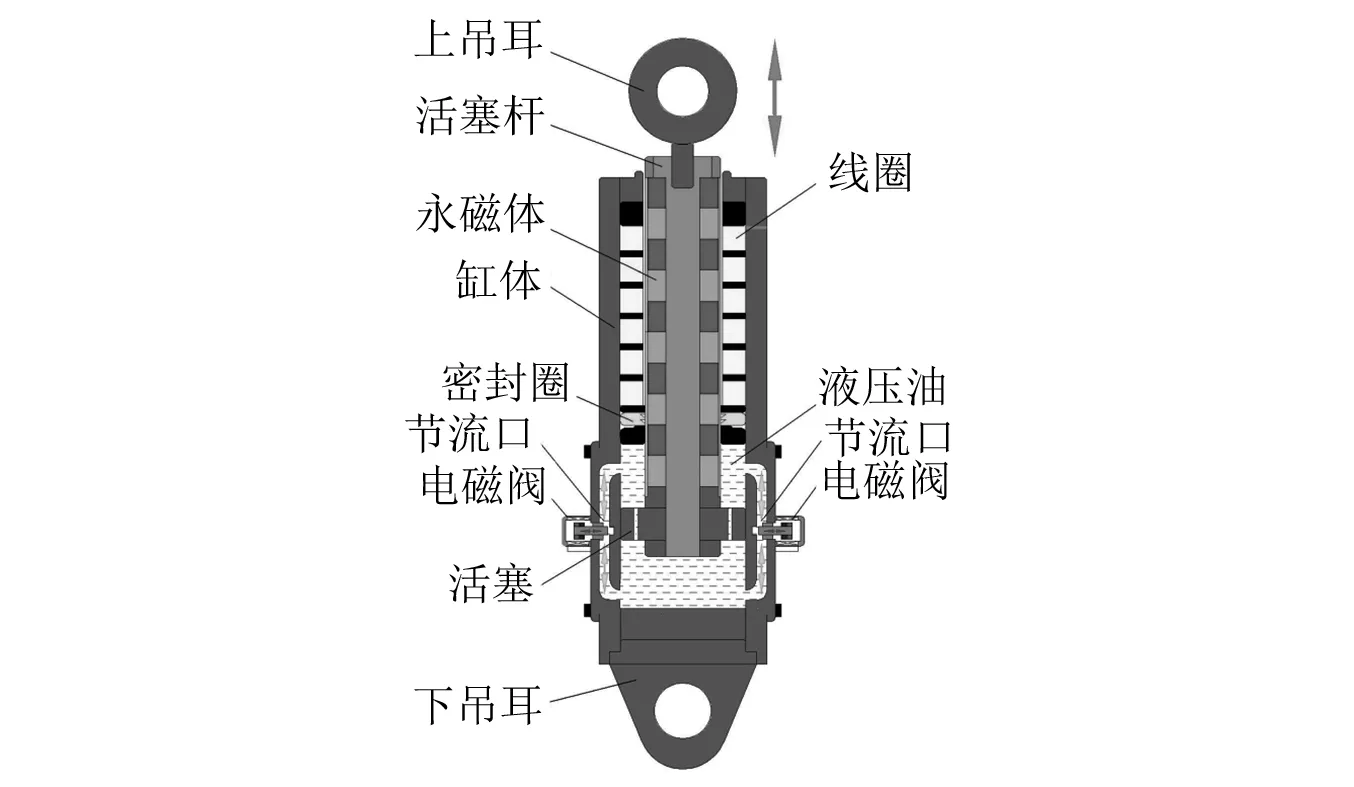
圖1 EMLHA結構圖Fig.1 Structure diagram of EMLHA
懸架作動器是保障車輛行駛平順性與操縱穩定性的重要部件。長期的使用過程中,由于零件磨損、油液變質等可能會導致作動器出現故障。結合電磁混合懸架作動器結構,對該作動器常見的故障進行分析:①由于電磁閥的油液泄露或者直線電機漏磁現象引起的增益故障;②由于電磁干擾引起電磁閥閥芯位移偏差,導致的恒偏差故障;③由于液壓油高溫燒結或者直線電機活塞桿受熱膨脹,引起的卡死故障。
2 懸架系統動力學模型
為了能夠更加準確的仿真整車的實際振動,建立整車7自由度模型如圖2所示。
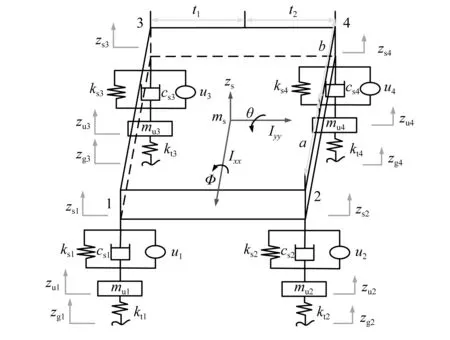
圖2 整車7自由度懸架模型Fig.2 Seven degree of freedom suspension model of vehicle
整車的車身垂向、俯仰、側傾的運動學方程分別為[17]
(1)
(2)
(3)

非簧載質量垂向運動方程為
(4)
其中,


選取該懸架系統的狀態變量為X、干擾輸入為W、控制輸入為U、控制輸出為Z,得到整車7自由度懸架狀態空間方程為
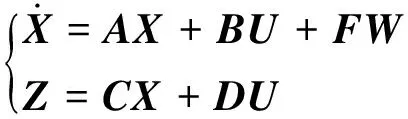
(5)
其中,
W=[zg1zg2zg3zg4]T,
U=[u1u2u3u4]T,
式中:zsui為懸架動撓度,zsui=zsi-zui;A為14×14維矩陣;B為14×4維矩陣;C為7×14維矩陣;D為7×4維矩陣;F為14×4維矩陣。
3 電磁混合主動懸架容錯控制
3.1 LQG控制器設計
LQG控制器的的控制目標是提高車輛的操縱穩定性與平順性。為了更好的降低車輛的車身垂向加速度、俯仰角加速度、側傾角加速度、懸架動撓度、輪胎動變形,并且使所需控制力最小,降低能耗。定義主動懸架的線性二次型綜合性能指標泛函如下[18]

(6)
式中:q1為車身垂向加速度加權系數;q2為車身俯仰角加速度加權系數;q3為車身側傾角加速度加權系數;q4,q5,q6,q7為懸架動撓度加權系數;q8,q9,q10,q11為輪胎動變形加權系數;q12,q13,q14,q15為可控力加權系數;Q為狀態加權矩陣;R為控制加權矩陣。
將線性二次型指標泛函J改為矩陣形式為
(7)

根據最優控制理論得最優控制規律為
U=-KX(t)
(8)
式中,K=R-1(BTP+NT)為反饋增益矩陣,P為修正Ricatti方程的解。
3.2 懸架故障建模
根據對懸架作動器故障的分析,當整車電磁混合主動懸架的第j個作動器發生故障時,建立如下故障模型
ufj=Δjuj+αj
(9)
式中:ufj為有故障時作動器輸出;uj為無故障時作動器輸出;αj為作動器卡死位置值或恒偏差值;Δj為作動器故障增益系數。當Δj∈(0,1),αj=0時,為增益故障;當Δj=0,αj≠0時,為卡死故障;當Δj=1,αj≠0時,為恒偏差故障。
電磁混合主動懸架系統故障輸出Uf
(10)
令
(11)
則
Uf=U+Fa
(12)
在故障狀態下,電磁混合主動懸架狀態空間方程為
(13)
發生故障時的殘差為

(14)
本文只對懸架發生增益故障進行分析,當某一懸架發生故障后,懸架作動器的輸出力簡化為
ufj=Δjuj
(15)
懸架的補償力為
Fj=(1-Δj)uj
(16)
3.3 故障檢測與隔離
基于觀測器的懸架故障診斷方法,是利用懸架系統的可測信息對無故障狀態下的輸出進行估計。通過觀測器重構后的狀態觀測變量與可測的實際變量做差值,構成殘差序列,從殘差序列中把故障檢測與隔離。由于路面干擾是隨機的,本文采用未知輸入觀測器對懸架進行狀態觀測,其全階未知輸入觀測器結構[19]為

(17)
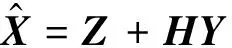
(18)

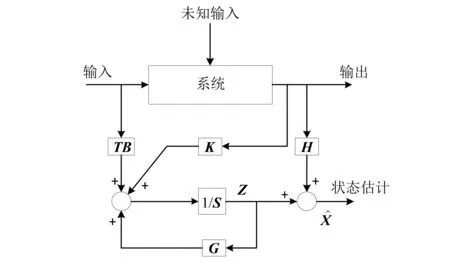
圖3 未知輸入觀測器結構圖Fig.3 Structure of UIO
觀測器的狀態誤差向量為

(19)
輸出估計殘差為
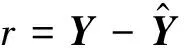
(20)
狀態誤差向量的控制方程為

(21)
式中:I為適維矩陣;K=K1+K2。
當式(18)滿足條件式(19)時
(22)

根據所得的懸架動撓度殘差rsu,對懸架系統進行故障診斷,故障診斷結構圖如圖4所示。
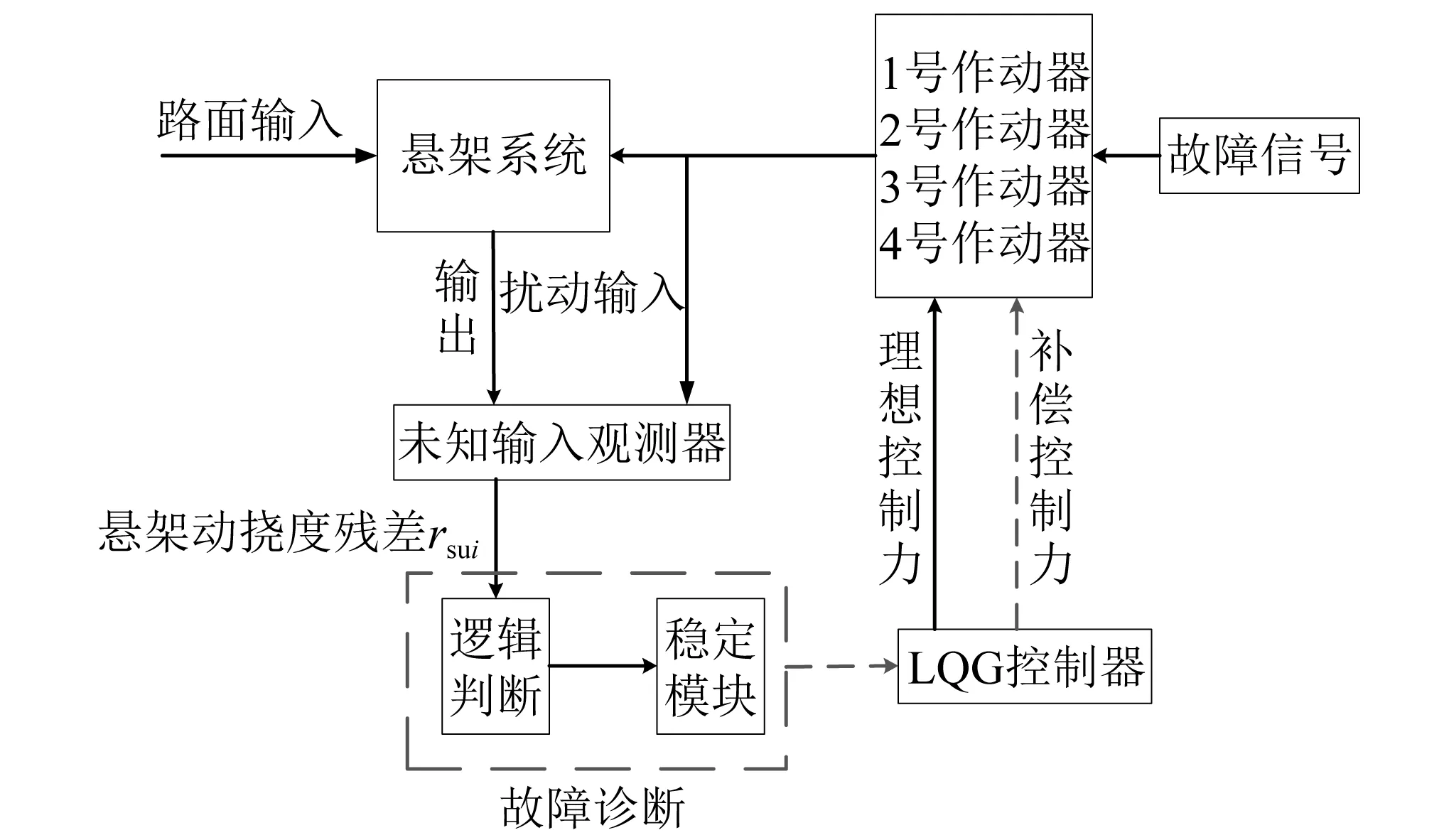
圖4 故障診斷框圖Fig.4 Fault diagnosis structure diagram
當有懸架作動器發生故障時,未知輸入觀測器可以計算得到四個懸架動撓度的殘差rsui,將四個懸架動撓度殘差值rsui輸入到邏輯判斷模塊,由于故障作動器的懸架動撓度殘差大于無故障作動器的懸架動撓度殘差,經過邏輯判斷模塊比較四個懸架動撓度大小后,可判定哪個作動器發生故障,將該故障作動器的懸架動撓度殘差輸入到穩定模塊,穩定模塊判定該故障穩定存在后,LQG控制器為故障作動器提供補償控制力,實現電磁混合懸架系統的容錯控制。
3.4 邏輯判斷模塊設計
本文只考慮一個懸架作動器發生故障的狀況,為了在懸架作動器發生故障后能夠判斷是幾號作動器發生的故障,設計了邏輯判斷模塊進行判斷。邏輯判斷框圖如圖5所示。
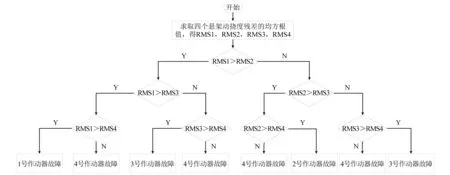
圖5 邏輯判斷框圖Fig.5 Logic judgment block diagram
將四個懸架動撓度殘差rsu1,rsu2,rsu3,rsu4輸入到邏輯判斷模塊,并求取其均方根值RMS1,RMS2,RMS3,RMS4,依次比較四個均方根值的大小,均方根值最大的說明該懸架作動器發生故障。
3.5 穩定模塊設計
由于路面凸塊等會對懸架產生沖擊,可能導致懸架瞬時故障。為了避免瞬時故障狀態時懸架系統產生誤判,對懸架進行過度力補償,導致懸架系統紊亂,能源浪費,設計了一種穩定模塊,提高了懸架對故障判斷的可靠性。穩定模塊流程如圖6所示。
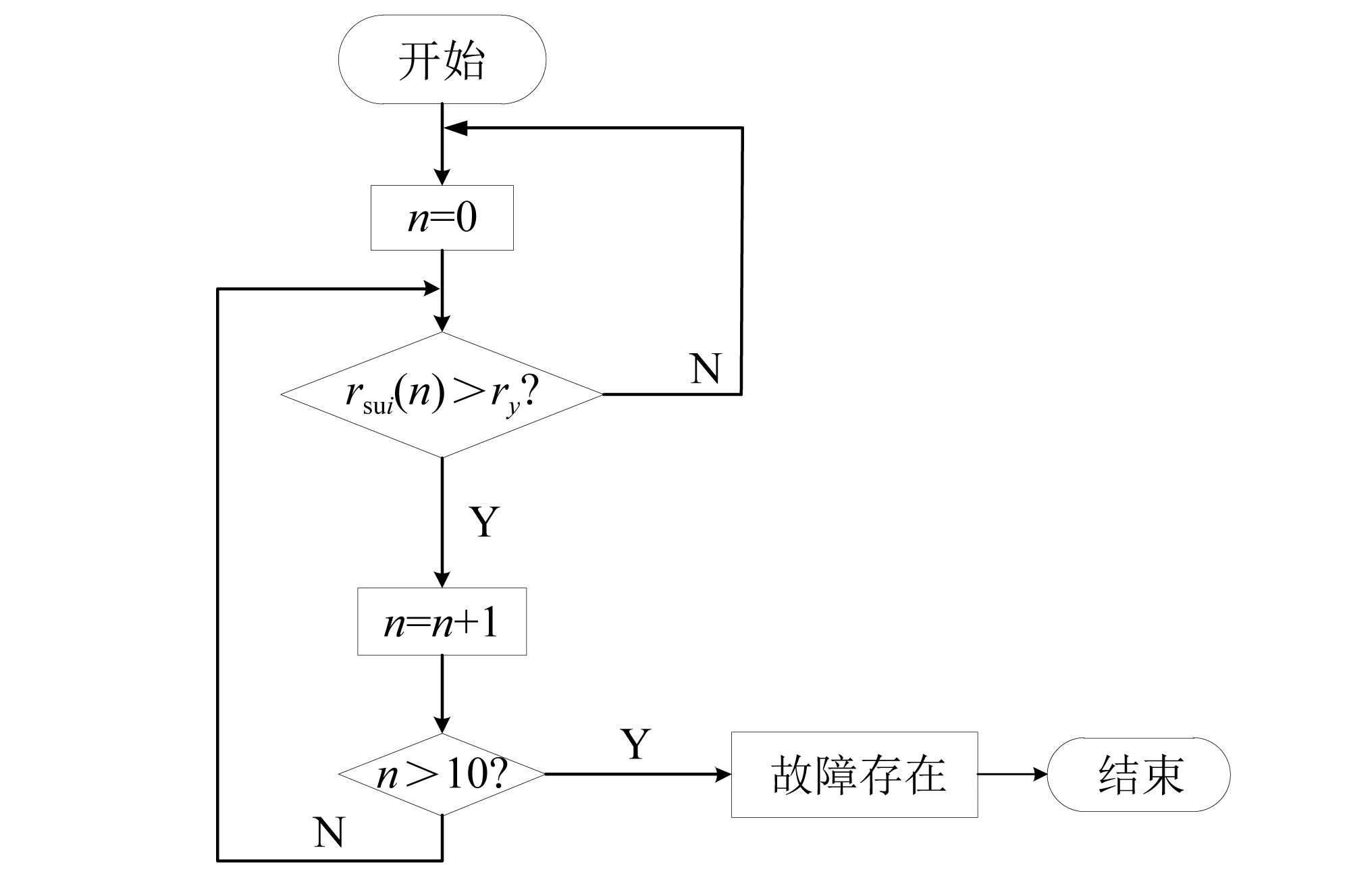
圖6 穩定模塊流程圖Fig.6 Flow chart of stability module
經過邏輯判斷模塊判定后,將該故障作動器的懸架動撓度殘差rsui輸入到穩定模塊,如果連續10次所得到的殘差都大于設定的懸架動撓度殘差閾值ry,那么確定該作動器發生故障,通過LQG控制器進行力補償,若其中一次懸架動撓度殘差不超過閾值ry,則重新開始采樣,直到滿足條件才對作動器進行力補償。
4 仿真分析
為了驗證所設計的整車電磁混合懸架容錯控制策略的正確性,在MATLAB/Simulink環境下建立電磁混合懸架的仿真模型,懸架系統的參數如表1所示。
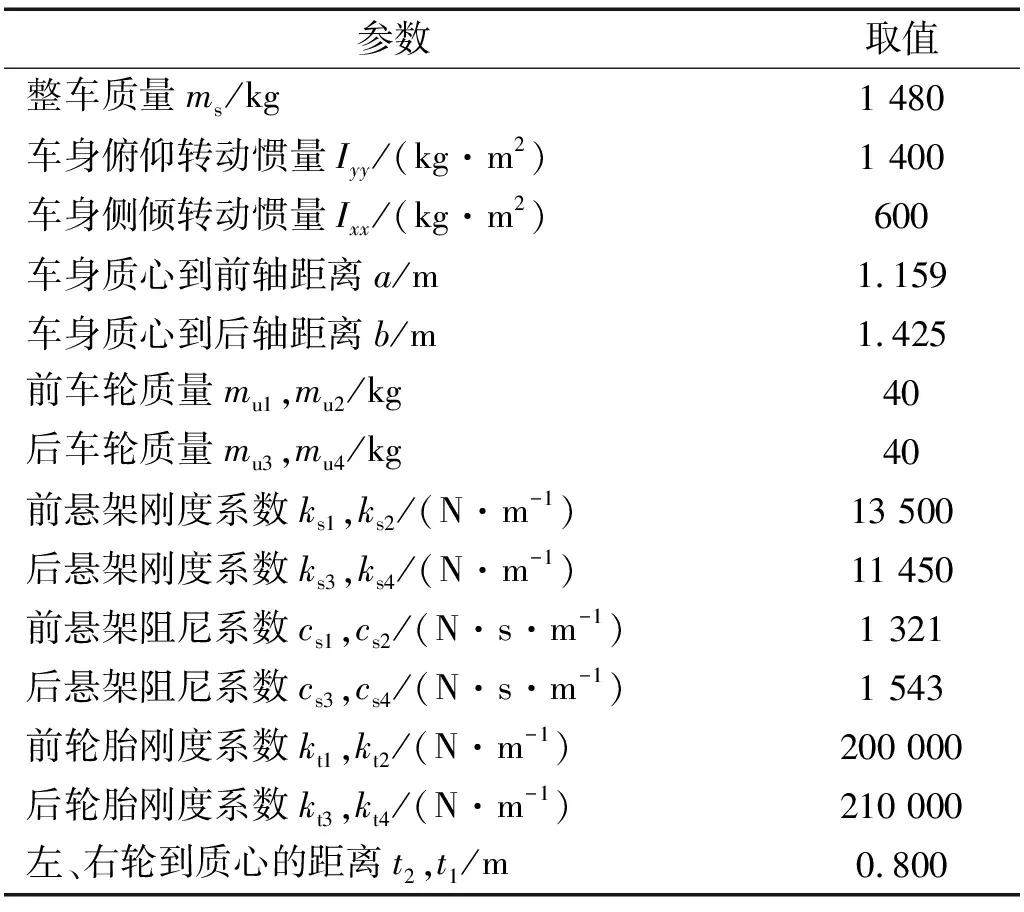
表1 懸架系統參數
4.1 未知輸入觀測器仿真分析
設定仿真在車速為70 km/h,B級路面下進行,仿真時間為5 s,對懸架狀態的實際值以及采用UIO狀態估計下的狀態估計值進行對比。對比結果如圖7所示。四項懸架性能指標均方根值對比,如表2所示。
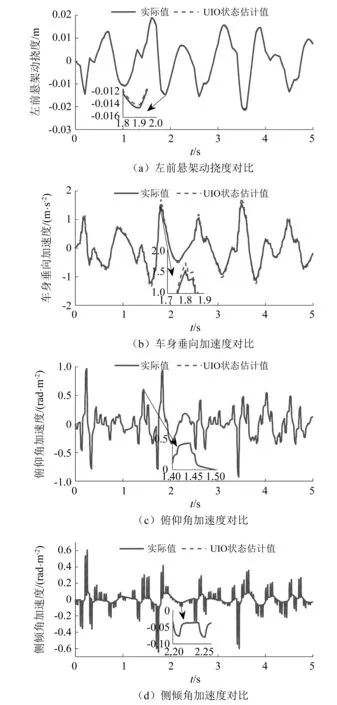
圖7 懸架狀態估計值對比Fig.7 Comparison of suspension state estimation
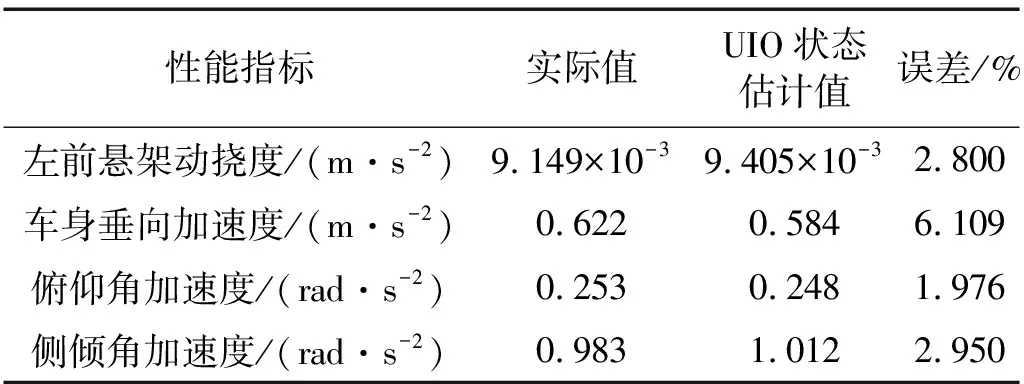
表2 懸架性能指標均方根值
根據表2所示,左前懸架動撓度的狀態估計誤差為2.800%,車身垂向加速度誤差為6.109%,俯仰角加速度誤差為1.976%,側傾角加速度誤差為2.950%。四項性能指標的狀態估計誤差均較小,在合理范圍內,表明未知輸入觀測器的狀態估計效果較為準確。
4.2 故障診斷仿真分析
為了驗證作動器發生故障后,所設計的故障診斷方法能夠準確的判斷故障來源,在MATLABSimulink環境下建立了整車電磁混合懸架的故障診斷模型,對增益故障情況下進行仿真分析。
設定左前懸架在5 s時發生0.4倍增益故障,仿真在車速為70 km/h,B級路面下進行,仿真時間共10 s。得出各懸架的懸架動撓度殘差,通過所設計的故障診斷模塊對哪一懸架發生故障進行判斷。如圖8所示為所設置的左前懸架增益故障,圖9為發生故障后各架的懸架動撓度殘差。
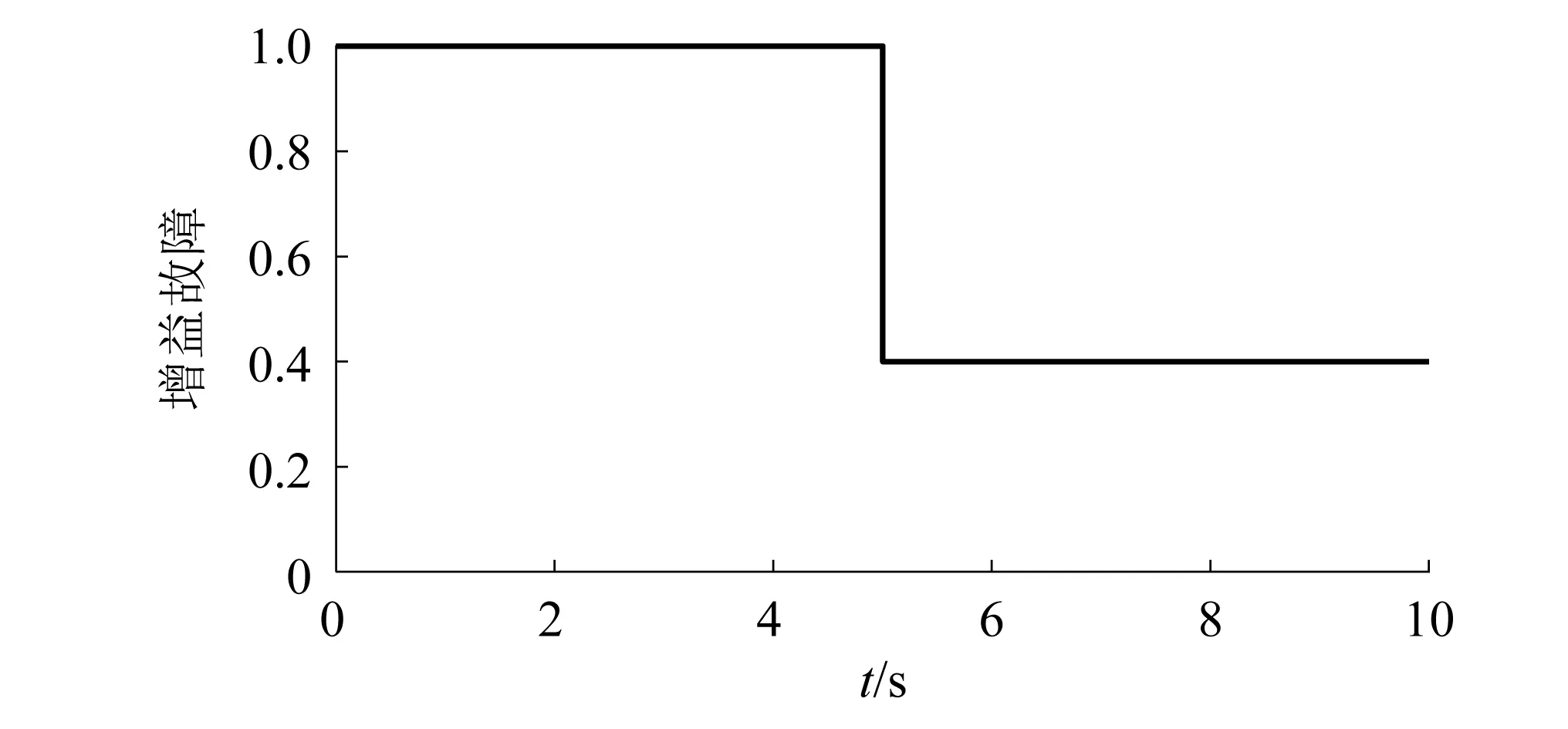
圖8 左前懸架增益故障Fig.8 Left front suspension gain fault

圖9 懸架動撓度殘差Fig.9 Residual of suspension working space
左前懸架動撓度殘差均方根值為9.007×10-3m,右前懸架動撓度殘差均方根值為3.687×10-3m,左后懸架動撓度殘差均方根值為2.467×10-3m,右后懸架動撓度殘差均方根值為3.144×10-3m。故障診斷模塊根據四個懸架動撓度的均方根值得出左前懸架動撓度殘差的均方根值最大,將該信號輸入到穩定模塊,連續采樣10次的懸架動撓度殘差都超過了閾值,判定其發生故障。
4.3 容錯控制仿真分析
為了驗證所設計容錯控制的有效性,分別對LQG控制下的正常狀態,發生故障后的故障狀態,以及故障進行容錯控制后的懸架性能進行對比。懸架的性能對比圖如圖10所示。對左前懸架在5 s時設置0.4倍增益故障,設定仿真在車速為70 km/h,B級路面下進行,仿真時間共10 s。
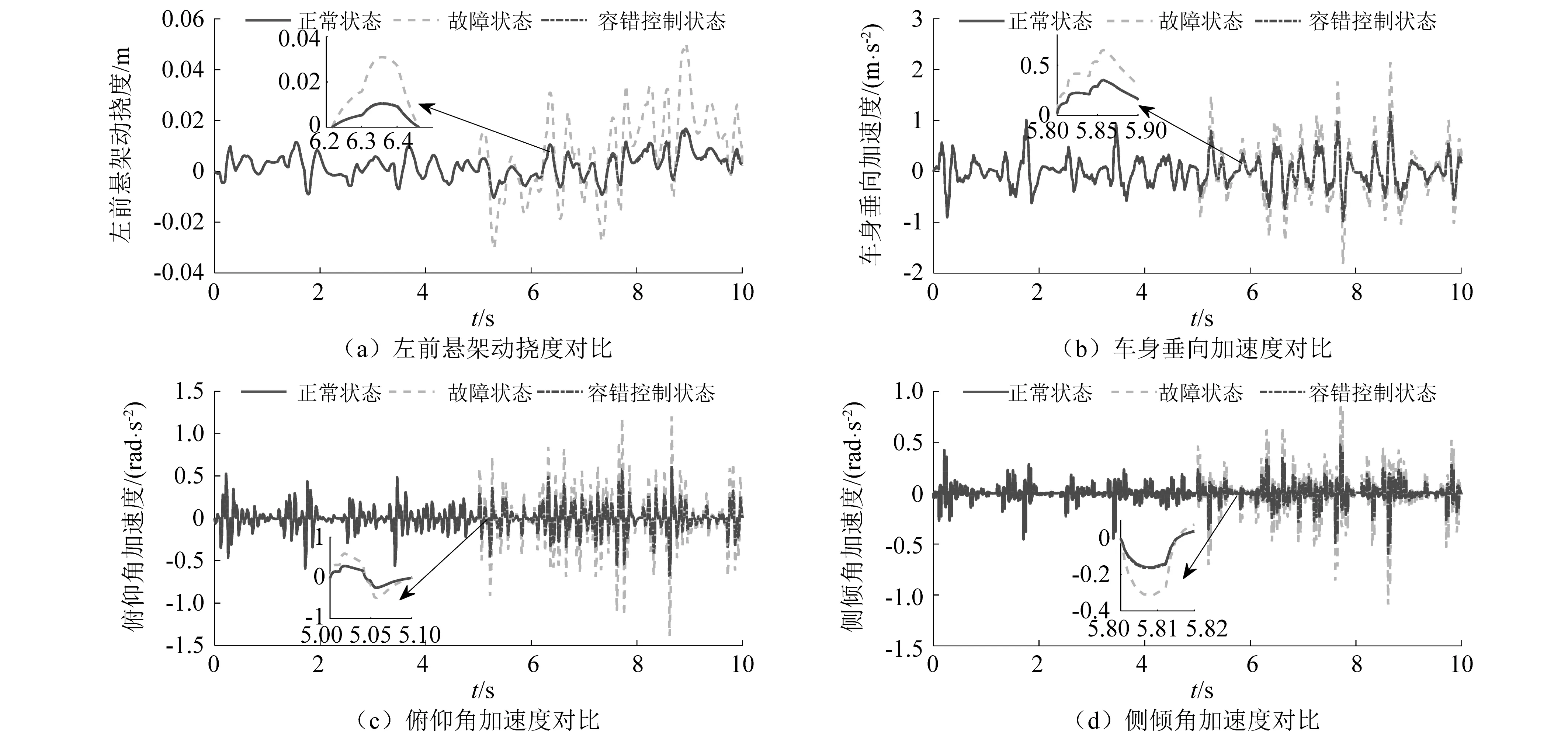
圖10 懸架性能對比Fig.10 Comparison of suspension performance
由表3可知,在0~10 s內,左前懸架動撓度容錯效果(容錯控制狀態與故障狀態相比)為58.717%,車身垂向加速度容錯效果為32.498%,俯仰角加速度容錯效果為35.850%,側傾角加速度容錯效果為34.560%。根據仿真結果,在所設計的容錯控制策略下,整車電磁混合懸架的性能指標得到提升,改善了車輛平順性與操縱穩定性同時,安全性也得到保障,表明該容錯控制策略具有有效性。

表3 不同狀態下懸架性能指標均方根值
4.4 頻域分析
為了從頻域角度分析該容錯控制的效果,對三種狀態下的左前懸架動撓度、車身垂向加速度、俯仰角加速度、側傾角加速度進行快速傅里葉變換,得到相應的功率譜密度,如圖11所示。
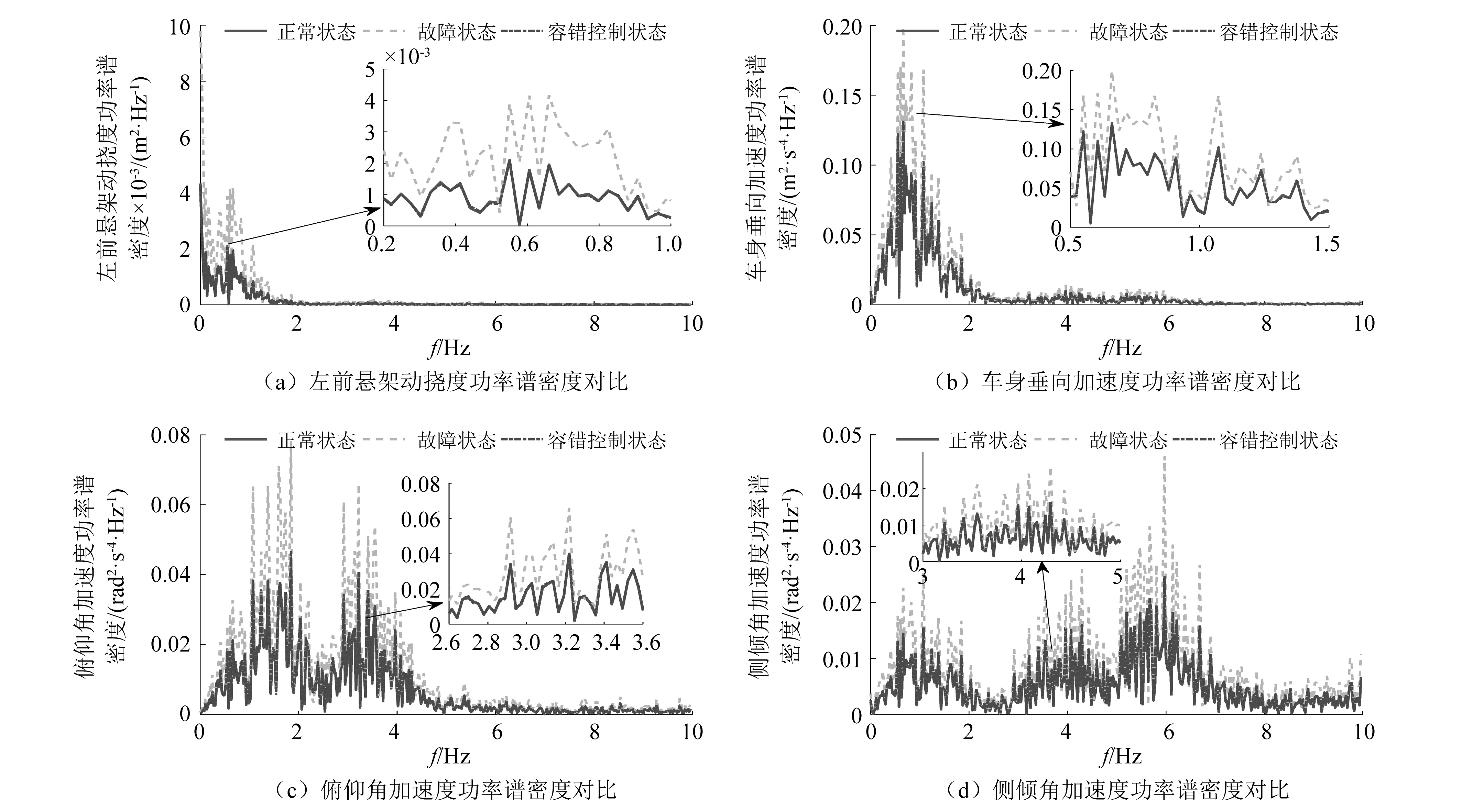
圖11 不同狀態下懸架性能指標功率譜密度對比Fig.11 Comparison of power spectral density of suspension performance index under different states
由圖11可知,在頻率為0~10 Hz內,在容錯控制狀態下整車電磁混合懸架系統的四項性能指標的功率譜密度相比故障狀態下大幅降低,并且最終趨向于平穩。在車身共振頻率1.0~1.5 Hz以及人體最敏感的頻率范圍4.0~12.5 Hz內[20],功率譜密度顯著降低,可以減小路面沖擊對車身以及人體臟器官的損害。
5 實車試驗
為了驗證所設計的整車電磁混合懸架容錯控制的正確性,對所設計的容錯控制進行了整車試驗。試驗的設備如圖12所示,包括試驗車、電磁混合懸架、位移傳感器、DSPACE、上位機、數據采集儀、驅動模塊、加速度傳感器等。

圖12 試驗系統結構示意圖Fig.12 Schematic diagram of test system structure
通過DSPACE對電磁混合懸架的輸入電流進行控制,從而調節電磁混合懸架的控制力。初始時刻,控制輸入電流為10 A,電磁混合懸架工作在正常狀態,在t=6 s時,改變左前懸架輸入電流為5 A,懸架所提供的作動力不足,以此模仿電磁混合懸架處于故障狀態,進行試驗。四個位移傳感器將采集的懸架動撓度信號進行對比,判斷哪個懸架發生故障,對其進行力補償,整個試驗過程持續12 s。由于試驗條件的限制,只對左前懸架動撓度和車身垂向加速度進行對比,試驗結果如圖13和圖14所示。
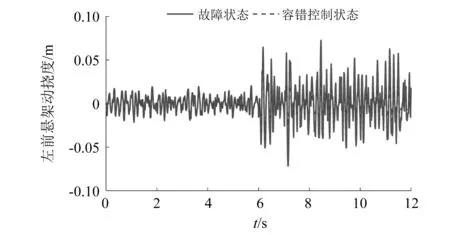
圖13 左前懸架動撓度試驗對比Fig.13 Test comparison of left-front suspension working space
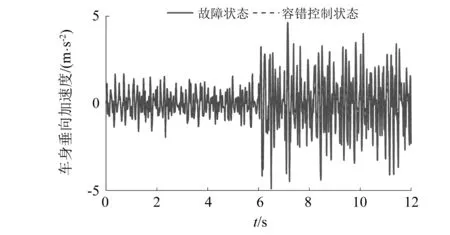
圖14 車身垂向加速度試驗對比Fig.14 Test comparison of vehicle body vertical acceleration
根據試驗結果,在第6秒發生故障后,容錯控制使故障懸架性能經過短暫時滯后性能得到提升。在故障狀態下,電磁混合懸架左前懸架動撓度均方根值為1.788×10-2m,在容錯控制狀態下,左前懸架動撓度均方根值為1.006×10-2m,相比故障狀態降低了43.736%。在故障狀態下,電磁混合懸架車身垂向加速度均方根值為1.230 m/s2,在容錯控制狀態下,車身垂向加速度均方根值為0.734 m/s2,相比故障狀態降低了40.325%。電磁混合懸架在發生故障時,通過容錯控制策略實時控制,懸架的安全性與舒適性得到了提高。
6 結 論
(1)針對整車電磁混合主動懸架的某一作動器發生故障,提出了一種故障診斷與容錯控制方法。通過未知輸入觀測器對懸架進行狀態估計,根據獲取的懸架動撓度殘差信息,在邏輯模塊與穩定模塊的聯合判定下,對懸架作動器故障做出判斷并對故障懸架進行力補償。
(2)利用MATLABSimulink軟件對所設計的故障診斷與容錯控制方法進行仿真分析,結果表明:在容錯控制下,左前懸架動撓度容錯效果為58.717%,車身垂向加速度容錯效果為32.498%,俯仰角加速度容錯效果為35.850%,側傾角加速度容錯效果為34.560%。
(3)最后開展了整車電磁混合懸架容錯控制實車試驗,分析了左前懸架動撓度與車身垂向加速度的改善效果,驗證了該方法的可行性。
猜你喜歡
汽車維修與保養(2019年7期)2020-01-06 03:30:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鐵道通信信號(2016年4期)2016-06-01 12:10:19
電測與儀表(2016年5期)2016-04-22 01:13:50
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年8期)2015-04-17 03:32:52
汽車維修與保養(2015年6期)2015-04-17 03:31:50
汽車維修與保養(2015年7期)2015-04-17 02:12:40
汽車維修與保養(2015年2期)2015-04-17 01:30:34
汽車維護與修理(2015年2期)2015-02-28 12:15:39
