基于數(shù)據(jù)融合的果園農(nóng)情檢測矢量無人機(jī)應(yīng)用
2022-03-17 01:43:08李彥沛蒲巖巖趙鵬飛李坤建徐一珍
農(nóng)機(jī)使用與維修 2022年3期
李彥沛,蒲巖巖,趙鵬飛,李坤建,徐一珍
(佳木斯大學(xué) 機(jī)械工程學(xué)院,黑龍江 佳木斯 154007)
0 引言
當(dāng)前,多旋翼無人機(jī)在植保飛防領(lǐng)域已經(jīng)有了長足的發(fā)展,但在一些復(fù)雜特殊場景下的應(yīng)用還十分局限。同時,因為多旋翼無人機(jī)屬于欠驅(qū)動型機(jī)構(gòu),在狹小場景下的飛行安全難以保障。針對農(nóng)業(yè)作業(yè)場景下,機(jī)身需要攜帶大容量藥箱及液體農(nóng)藥,在機(jī)動動作時藥液在藥箱內(nèi)的相對運(yùn)動導(dǎo)致無人機(jī)自身姿態(tài)受到干擾。針對以上問題設(shè)計了一種使用舵機(jī)控制電機(jī)姿態(tài)的模型,通過控制電機(jī)方向?qū)αΦ淖饔梦恢眉罢w姿態(tài)進(jìn)行解耦,實(shí)現(xiàn)了在保持主體水平情況下的多角度機(jī)動,使得靈活性大幅度提升。在此基礎(chǔ)上利用數(shù)字波束形成雷達(dá)、多傳感器數(shù)據(jù)融合,實(shí)現(xiàn)了對當(dāng)前作業(yè)區(qū)域內(nèi)果樹的農(nóng)情監(jiān)測,并根據(jù)相關(guān)數(shù)據(jù)實(shí)現(xiàn)變量霧噴、仿形彌霧、噴霧授粉等作業(yè)功能。
1 機(jī)體結(jié)構(gòu)
1.1 機(jī)構(gòu)設(shè)計
本文在對滑環(huán)式全矢量無人機(jī)建模的過程中遵循整機(jī)質(zhì)心與幾何中心重合,各部分與質(zhì)心完全對稱且螺旋槳在飛行過程中保持槳型不發(fā)生形變的原則,通過對大地坐標(biāo)系解算確立自身姿態(tài)變化。
滑環(huán)式全矢量無人機(jī)系統(tǒng)模型采用圓形滑環(huán)設(shè)計如圖1所示,在兩個滑環(huán)的中部均有舵機(jī)對整體姿態(tài)進(jìn)行控制。滑環(huán)的設(shè)計使得動力電機(jī)提供的動力能夠更加穩(wěn)定地傳遞給機(jī)身,使得機(jī)構(gòu)穩(wěn)定性得到保障。兩個滑環(huán)相互作用,實(shí)現(xiàn)了電機(jī)作用力的全矢量移動。常規(guī)多旋翼植保無人機(jī)利用的是強(qiáng)耦合的非線性系統(tǒng),這種欠驅(qū)動系統(tǒng)使得在對于機(jī)身姿態(tài)的控制上呈現(xiàn)明顯的模糊性,即只能通過機(jī)身整體的側(cè)傾實(shí)現(xiàn)移動,控制精度極低。該模型所提出的結(jié)構(gòu)將明顯改善多旋翼無人機(jī)小范圍機(jī)動條件下移動精度低的問題。
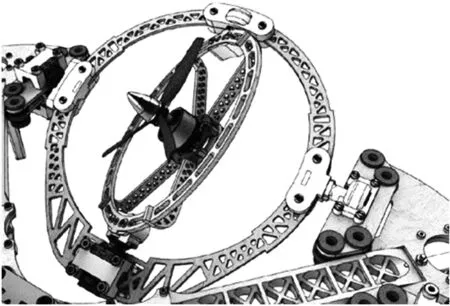
圖1 機(jī)構(gòu)設(shè)計
1.2 動力模型
滑環(huán)式全矢量無人機(jī)的動力是由無刷電機(jī)帶動螺旋槳轉(zhuǎn)動產(chǎn)生的,系統(tǒng)所產(chǎn)生的推力是伴隨電機(jī)的轉(zhuǎn)速變化而變化的。以懸停為例,此時無人機(jī)處于平衡狀態(tài)且周圍氣流速度可視為0,則推力與扭矩可以定義為[1]
(1)
(2)
式中Ti—推螺旋槳推力,N;
Qi—空氣流速,m·s-1;
ωi—螺旋槳轉(zhuǎn)速,r·min-1;
ρ—空氣密度,kg·m-3;
R—槳葉半徑,m;
A—槳葉面積,m2,A=πR2;
CT—拉力系數(shù);
CQ—扭矩系數(shù)。
2 控制系統(tǒng)
2.1 控制方案
為了彌補(bǔ)普通多旋翼無人機(jī)欠驅(qū)動的特性,同時實(shí)現(xiàn)位置運(yùn)動與姿態(tài)角的解耦,該方案在電機(jī)的每個作用點(diǎn)上增加了兩個舵機(jī)的控制量,同時使用滑環(huán)式設(shè)計實(shí)現(xiàn)了全矢量控制。滑環(huán)的設(shè)計使得電機(jī)動力能夠更加穩(wěn)定地傳遞給機(jī)身,使機(jī)構(gòu)穩(wěn)定性得到保障。兩個滑環(huán)相互作用,使每個電機(jī)都能夠獨(dú)立繞各自機(jī)臂的俯仰軸與橫滾軸順時針或逆時針旋轉(zhuǎn)。經(jīng)過該機(jī)構(gòu)的解耦作用,電機(jī)可以在保證一個傾角的狀態(tài)下朝任意方向移動。
控制系統(tǒng)的整體結(jié)構(gòu)及數(shù)據(jù)處理流程如圖2所示,其包括傳感器采集的原始數(shù)據(jù)與處理后解析得到的位置與姿態(tài),通過機(jī)載運(yùn)算設(shè)備進(jìn)行姿態(tài)解算,并對上位機(jī)及遙控器數(shù)據(jù)進(jìn)行判斷與融合后計算出期望位置和姿態(tài)角,系統(tǒng)將數(shù)據(jù)解算為姿態(tài)與位置后分別由傾角補(bǔ)償算法和姿態(tài)轉(zhuǎn)換算法根據(jù)當(dāng)前系統(tǒng)狀態(tài)進(jìn)行解算與補(bǔ)償,最后控制分配算法將兩者數(shù)據(jù)融合并輸出當(dāng)前無人機(jī)模型的姿態(tài)。位置控制和姿態(tài)控制的計算流程是基于PID控制設(shè)計的。

圖2 算法流程
2.2 動力系統(tǒng)模型
根據(jù)基爾霍夫定律,直流無刷電機(jī)電樞回路的電動勢平衡方程為
(3)
式中ua—電樞電壓,V;
La—電樞電感,H;
ia—電樞電流,A;
Ra—電樞電阻,Ω;
ωe—電機(jī)轉(zhuǎn)速,r·min-1;
Ce—電機(jī)常數(shù)。
電動機(jī)的電磁轉(zhuǎn)矩Me可以表示為
Me=Cmia
(4)
式中Cm—電機(jī)轉(zhuǎn)矩系數(shù)。
電機(jī)軸上動力學(xué)方程可以表示為
(5)
式中Jm—電機(jī)轉(zhuǎn)動慣量,kg·m-2;
Mc—負(fù)載扭矩,N·m。
電樞電感很小,將其忽略可得
ia=(ua-Ceωe)/R
(6)
控制信號與輸出轉(zhuǎn)速的關(guān)系式[2]
(7)
式中n—阻力系數(shù)。
3 農(nóng)情檢測
在實(shí)際飛行中使用毫米波雷達(dá)向地面發(fā)出毫米波信號,通過返回的數(shù)據(jù)計算出與地面相對高度,將數(shù)據(jù)傳回飛控系統(tǒng)從而操控?zé)o人機(jī)保持與地面相對穩(wěn)定的飛行高度。通過數(shù)字成像雷達(dá)對正在飛行中的植保無人機(jī)下方進(jìn)行扇形掃描并收集返回的數(shù)據(jù),最終生成點(diǎn)云圖像并提供給數(shù)據(jù)融合系統(tǒng)。通過多光譜相機(jī)對正在飛行中的植保無人機(jī)下方進(jìn)行拍照分析,生成不同區(qū)間的可見光圖像并提供給數(shù)據(jù)融合系統(tǒng)。數(shù)據(jù)融合系統(tǒng)根據(jù)點(diǎn)云圖像和多光譜圖像進(jìn)行數(shù)據(jù)融合,評估出農(nóng)作物的疏密分布情況并交給執(zhí)行機(jī)構(gòu)實(shí)時調(diào)整農(nóng)藥的噴灑用量,實(shí)現(xiàn)實(shí)時變量噴灑。
在實(shí)際作業(yè)中作業(yè)效果易受地勢起伏影響,故在農(nóng)情檢測中使用毫米波雷達(dá)對地觀測,實(shí)現(xiàn)無人機(jī)與作物之間的相對高度保持統(tǒng)一;在果園等易受果樹冠層厚度及個體差異影響的場景,使用成像雷達(dá)通過反饋的點(diǎn)云圖實(shí)現(xiàn)對植株的定位及對個體大小的評估,從而更好地匹配合適的藥液用量;在普通田地中使用多光譜相機(jī)能夠判斷當(dāng)前作業(yè)區(qū)域的植株疏密程度,實(shí)現(xiàn)全面的農(nóng)情檢測。農(nóng)情檢測算法流程如圖3所示。
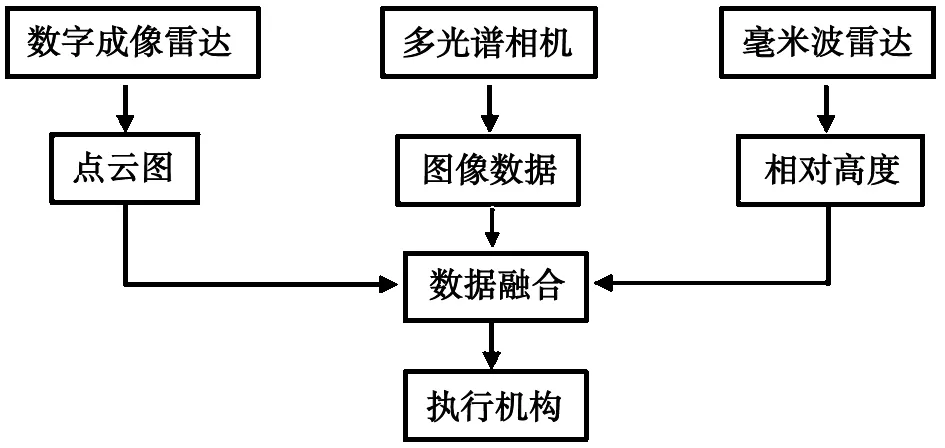
圖3 農(nóng)情檢測算法流程圖
4 多尺度圖像融合
針對農(nóng)田及農(nóng)作物作業(yè)特征,使用數(shù)據(jù)融合技術(shù)對采集到的圖像進(jìn)行綜合判斷。基于農(nóng)田的多尺度圖像融合主要包括圖像融合技術(shù)與坐標(biāo)融合算法。即將飛行器在農(nóng)田中實(shí)時采集到的不同波段的光譜相機(jī)在同一角度下拍攝的多幅圖像進(jìn)行實(shí)時處理,根據(jù)算法得到關(guān)于當(dāng)前農(nóng)田作業(yè)區(qū)域全面和準(zhǔn)確描述的圖像的處理過程。針對所處理的多光譜圖像及點(diǎn)云圖像的特點(diǎn)根據(jù)多尺度圖像融合算法采用像素級的融合并得到融合的圖像數(shù)據(jù)。融合后的圖像包含了植物枝干的分布情況(來自點(diǎn)云圖)和植物葉片的密度信息[3]。
在農(nóng)田作業(yè)中使用多尺度圖像融合技術(shù)是圖像計算領(lǐng)域一大難點(diǎn),農(nóng)田場景因地勢起伏、植被長勢、植株特點(diǎn)及植物光譜等特點(diǎn)具有算法選擇難、閾值設(shè)置多變等特點(diǎn)。多尺度圖像融合采取視覺由“粗”到“細(xì)”感知方式從不同波段中分解出目標(biāo)信息,再將目標(biāo)信息結(jié)合特殊圖像處理算法進(jìn)行深度處理從而提取出農(nóng)作物對應(yīng)的特征信息。多尺度分解方法在圖像邊緣細(xì)節(jié)與全局近似信息分離獲得了計算上的便利和可靠性。多尺度分析的圖像融合算法流程如圖4所示。
該研究使用的圖像融合方法為基于多尺度分解的融合方法,將輸入圖像A進(jìn)行尺度分解,再將輸入圖像B進(jìn)行尺度分解,最終運(yùn)用多尺度反變換對融合后的分解系數(shù)反向重構(gòu)融合圖像,融合后的圖像是多個傳感器圖像的信息在一個圖像框架內(nèi)進(jìn)行顯示,其包含了植物的疏密程度及葉片的分布情況。圖像融合算法生成的融合圖像如圖5所示。

圖4 多尺度分析的圖像融合算法流程圖
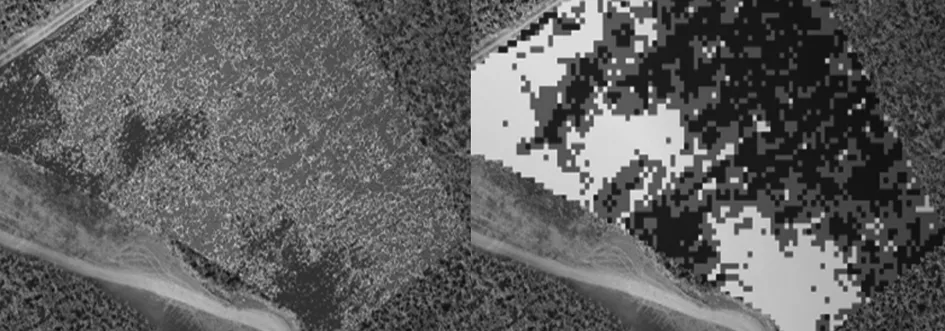
圖5 圖像融合算法融合圖
5 結(jié)論
針對特殊復(fù)雜場景下狹小區(qū)域內(nèi)多旋翼無人機(jī)機(jī)動不靈活的特點(diǎn)設(shè)計的滑環(huán)式全矢量無人機(jī)通過建立傾轉(zhuǎn)全矢量方案,解決了由于耦合作用導(dǎo)致不能兼顧運(yùn)動與姿態(tài)精度的問題,通過建立滑環(huán)式全矢量模型對植保作業(yè)中無人機(jī)的單姿態(tài)解耦模型,有效拓展了多旋翼無人機(jī)在農(nóng)情檢測中的應(yīng)用范圍,實(shí)現(xiàn)了植保作業(yè)效率提升。為了解決實(shí)際農(nóng)田中因地勢起伏、植被疏密程度所帶來的實(shí)際作業(yè)效果的影響而引入農(nóng)情監(jiān)測系統(tǒng),使用數(shù)字成像雷達(dá)、多光譜相機(jī)和毫米波雷達(dá)對作業(yè)區(qū)域進(jìn)行實(shí)時檢測,在保障作業(yè)安全的同時使用多尺度分析的圖像融合算法實(shí)時產(chǎn)生當(dāng)前作業(yè)區(qū)域的農(nóng)田處方圖,使得作業(yè)模塊可以按照農(nóng)情檢測系統(tǒng)得出的結(jié)果實(shí)時調(diào)整作業(yè)方案及藥液用量,實(shí)現(xiàn)了精準(zhǔn)農(nóng)業(yè)與綠色農(nóng)業(yè)。
(05)
猜你喜歡
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
今日農(nóng)業(yè)(2021年19期)2022-01-12 06:16:36
新作文·小學(xué)低年級版(2021年9期)2021-11-27 07:57:46
中老年保健(2021年11期)2021-08-22 03:15:44
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年1期)2021-03-19 08:28:38
無線電工程(2020年11期)2020-10-29 01:25:46
學(xué)生天地(2020年17期)2020-08-25 09:28:54
現(xiàn)代出版(2020年3期)2020-06-20 07:10:34
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
故事大王(2016年7期)2016-09-22 17:30:08
