靶場全地形快速觀測清場車系統(tǒng)
2022-03-21 11:37:28于國棟王春陽馮江海劉曉辰李忠琦
探測與控制學報 2022年1期
于國棟,王春陽,馮江海,劉曉辰,張 月,李忠琦
(中國人民解放軍63850部隊,吉林 白城 137001)
0 引言
靶場試驗時,由于要保證彈丸落區(qū)范圍內(nèi)不能有人或者牲畜,在武器射擊前,清場人員要先進入試驗區(qū)域,以保證試驗安全。目前,清場范圍是在電子地圖或者紙質(zhì)地圖上標定的,各清場人員按照標定的位置進行清場,清場后離開試驗區(qū)域等候后續(xù)命令。沒有合理的清場區(qū)域劃分和路徑規(guī)劃,指揮人員不能實時掌握清場人員的位置,也不能確定是否存在遺漏清場或重復清場的情況。另外,目前完成清場任務的車輛多為越野車,對于落區(qū)地貌復雜的區(qū)域存在諸多限制。隨著武器裝備的不斷發(fā)展,遠程武器試驗逐年增加,炮彈落區(qū)距離發(fā)射陣地較遠,清場范圍較大,導致清場過程中極易出現(xiàn)遺漏清場或重復清場的情況。如果落區(qū)道路復雜,車輛難以行駛,只能采用徒步,嚴重影響清場效率。
隨著現(xiàn)代科技的不斷發(fā)展和進步,以具備復雜地貌正常行駛能力的全地形車為運載平臺[1],搭載具備語音調(diào)度、視頻傳輸、路徑規(guī)劃、網(wǎng)絡通信功能的清場設備[2-5]和具備彈丸落點測量功能的終點測量設備[6-7],必然會極大地提高靶場試驗效率。因此,為解決上述問題,提出一種全地形快速觀測清場車系統(tǒng),主要用于完成復雜地貌場區(qū)的清場、找彈著點、終點坐標概略觀測等任務。
1 工作原理
全地形快速觀測清場車系統(tǒng)由全地形車子系統(tǒng)、快速清場子系統(tǒng)、終點坐標觀測子系統(tǒng)三部分組成。
全地形車主要由動力傳動系統(tǒng)、差速制動轉向系統(tǒng)和動力艙三個部分組成。用于承載清場人員及觀測、清場設備。
快速清場子系統(tǒng)由基站、車載終端、手持終端等組成。基站負責接收清場區(qū)域的圖像、清場人員的車輛軌跡及語音。車載終端集成視頻采集設備、語音輸入設備等。手持終端主要裝備給各個清場人員,集成了語音輸入模塊、視頻輸入模塊、定位模塊等。
終點坐標觀測子系統(tǒng)主要由測量攝像機、圖像無線傳輸設備、電源及數(shù)據(jù)處理軟件等部分組成。測量攝像機負責拍攝落區(qū)圖像,圖像無線傳輸設備負責向基站實時傳輸圖像信息,基站接收到信息后提供給數(shù)據(jù)處理軟件進行處理,數(shù)據(jù)處理軟件提取相關目標信息,交會計算得出炸點的終點概略坐標。
全地形快速觀測清場車系統(tǒng)的工作模式如圖1所示。清場前,將清場子系統(tǒng)的手持終端發(fā)放給各清場人員,全地形車子系統(tǒng)搭載指揮人員和快速清場子系統(tǒng),建立覆蓋試驗場區(qū)的網(wǎng)絡信號;劃分清場區(qū)域,并快速提取清場區(qū)域具備邊緣特性的GPS數(shù)據(jù)點[8],車載終端通過網(wǎng)絡基站建立的網(wǎng)絡信號將GPS數(shù)據(jù)點發(fā)送至清場人員所攜帶的手持終端上;清場人員通過手持終端接收到清場區(qū)域及車輛行走路徑后,開啟導航軟件,按指定的路徑在清場區(qū)域內(nèi)完成清場任務;同時手持終端內(nèi)置的定位模塊會將清場人員行走的路徑實時回傳到指揮車,指揮員根據(jù)各清場人員回傳的路徑信息與預先劃分完成清場區(qū)域進行對比,如發(fā)生重復清場、遺漏清場的情況,則通過語音調(diào)度模塊及時進行糾正。
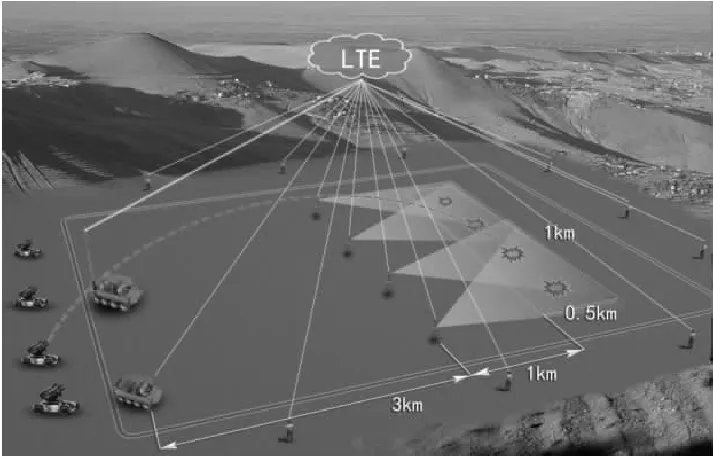
圖1 全地形快速觀測清場車系統(tǒng)工作模式示意圖Fig.1 Working mode of all terrain rapid observation and clearing warning vehicle system
當需要測量炮彈落點坐標時,全地形車子系統(tǒng)搭載終點觀測子系統(tǒng),駕駛至指定位置并架設儀器,各測量點位的操作人員完成方位標定工作后,將攝像機轉向炮彈落區(qū)處,盡量保證視場能夠覆蓋既定的彈著點區(qū)域。開啟無線圖像傳輸設備,操作人員乘坐全地形車退至安全區(qū)域以外,操作人員可通過無線圖像傳輸設備回傳的視頻信息實時監(jiān)控彈著點區(qū)域。當彈丸落地爆炸后,各測量點的測量攝像機記錄各自區(qū)域內(nèi)的圖像,北斗雙模授時模塊負責各攝像機時間信息同步,測角儀記錄攝像機的高低和俯仰角度。圖像存儲器集成了相機控制模塊和存儲模塊,可遠程控制攝像機的復位和圖像采集、記錄。通過回放查找到目標點所在的圖像,通過網(wǎng)絡向各觀測點發(fā)送指令,要求將指定時間段的圖像傳送到車載終端,操作人員完成各觀測點目標信息提取和交會處理工作,計算得到彈丸落點坐標。試驗結束后,將彈丸落點的概略坐標發(fā)送至清場人員的手持終端上,通過導航軟件引導清場人員進入彈丸落區(qū)尋找彈坑。
2 清場子系統(tǒng)
清場子系統(tǒng)是以全地形車為運載平臺構建的一套具備語音調(diào)度、視頻傳輸、網(wǎng)絡覆蓋等功能的系統(tǒng)。作為整個系統(tǒng)的指揮中心,在執(zhí)行清場任務時,需要根據(jù)清場人員數(shù)量現(xiàn)有條件,實時、高效、合理地規(guī)劃清場人員各自負責的清場區(qū)域,避免清場區(qū)域的重復規(guī)劃和遺漏規(guī)劃;在語音調(diào)度上作為整個系統(tǒng)的處置單位,需要根據(jù)清場人員回傳的清場路徑信息,指揮人員通過語音調(diào)度功能實時調(diào)整清場人員的清場區(qū)域及清場路徑。因此,必須具備電子地圖導入、更新、顯示,清場方案規(guī)劃,標記停車點,清場路徑信息傳輸,獲取清場人員實際行走路徑,點對點、點對多點的語音調(diào)度等功能。各個清場人員的手持終端是與指揮員進行溝通的設備,也必須具有電子地圖導入、更新、顯示、導航、定位及語音通話等功能。
1) 路徑規(guī)劃和區(qū)域劃分
指揮員根據(jù)清場人員數(shù)量和道路情況合理分配工作量,在電子地圖上劃分清場區(qū)域,一些重要路口必須標記清楚,將標注好的地圖發(fā)送給各清場人員的手持終端,并做好備份。
區(qū)域特性信息提取:根據(jù)區(qū)域劃分結果提取其特征信息,特征信息主要包含劃分區(qū)域邊緣位置特征點,包括邊界點的個數(shù)和坐標等。路徑傳輸:將各清場區(qū)域優(yōu)化后的路徑位置特征點通過基站傳輸至清場人員手持終端。路徑規(guī)劃:實現(xiàn)區(qū)域邊緣位置特征點的運算生成清場人員行走路線,同時清場指揮員根據(jù)電子地圖對比手動更改行走路線,優(yōu)化清場人員行走路線使其更加合理、高效、最優(yōu)。
2) 實時導航及位置信息反饋
手持終端上有定位模塊,可以實時獲取設備的當前位置信息,并且將實際位置信息以路徑的形式標注在電子地圖上,方便查看實際行走路線。當前位置信息同時傳輸至車載終端,指揮員在電子地圖上也可以實時標注手持終端的行走路線。
3) 語音通話及視頻調(diào)度
語音通話實現(xiàn)撥打、接聽和掛斷的全過程操作,包括信令接收、建立通話、音頻解析、語音傳輸?shù)龋蓾M足用戶在不同的終端使用相同的協(xié)議進行通話。車載終端對于手持終端的視頻調(diào)度可以滿足同時打開多路窗口,按分頁的形式進行切換顯示,以達到掌握多個清場區(qū)域情況的能力。
3 試驗和結果
終點坐標觀測子系統(tǒng)的測量攝像機鏡頭存在畸變[9],為提高測量精度,使用前需要進行相機標定。試驗使用Halcon17.2軟件[10]進行相機標定,標準Halcon標定板的尺寸為400 mm×400 mm,圖案尺寸為320 mm×320 mm,圓直徑20 mm,圓中心距為40 mm。測量攝像機的圖像分辨率為1 280×1 024,像元大小為10 μm,鏡頭焦距為16 mm。對鏡頭進行畸變校正后,將大大提高設備的測量精度。
在試驗場區(qū)對終點坐標觀測子系統(tǒng)的性能進行驗證,以獲取其炸點坐標測量精度,圖2為試驗現(xiàn)場。將測量攝像機以間隔300 m進行布設,每個測站與炸點的距離大約500 m,盡量使測站與炸點的幾何關系達到理想圖形。

圖2 炸點坐標測量現(xiàn)場Fig.2 Scene of explossion point coordinate measurement
試驗共出現(xiàn)15個炸點,均在攝像機視場范圍內(nèi),分布隨機且均勻。測量攝像機采集了炸點出現(xiàn)時的圖像,通過文獻[11]中的計算脫靶量公式算出每個測站的角度脫靶量,再利用文獻[12-13]中的交會計算公式得出炸點的概略坐標。為了驗證炸點的測量精度,同時布設了靶場某型高精度測量經(jīng)緯儀系統(tǒng)同時對15個炸點目標進行測量,該設備的測角精度為20 s,換算到500 m測距,測量精度大約為0.1 m,其精度遠大于終點坐標觀測子系統(tǒng),因此,可將高精度測量經(jīng)緯儀系統(tǒng)的測量結果作為真值。兩個系統(tǒng)的測量結果差值作為終點坐標觀測子系統(tǒng)的誤差。15個炸點目標在三個方向上的誤差均在±4 m以內(nèi)。利用均方差公式計算得到,三個方向的誤差中誤差為,mx=±2.3 m,my=±1.9 m,mz=±0.9 m。這樣的精度指標,對于一個簡易、快速的炸點測量系統(tǒng)已經(jīng)足夠。
4 結論
本文提出全地形快速觀測清場車系統(tǒng),該系統(tǒng)用于完成靶場試驗中的清場警戒、快速找彈著點、終點坐標概略觀測等任務。以全地形車底盤為運載平臺,搭載多套子系統(tǒng),在復雜地形下提供了高機動性;構建以區(qū)域?qū)拵o線網(wǎng)絡為核心,能滿足在大范圍試驗場區(qū)內(nèi)進行數(shù)據(jù)、語音、圖像以及視頻等多媒體傳輸能力,極大地提高了清場效率;通過對測量攝像機進行了畸變矯正,提高了終點坐標概略測量的精度,當測站與炸點的距離約500 m時,炸點在三個方向上的測量誤差均能控制在±4 m以內(nèi)。
猜你喜歡
今日農(nóng)業(yè)(2021年9期)2021-11-26 07:41:24
發(fā)明與創(chuàng)新·小學生(2021年3期)2021-03-25 11:48:49
中學生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
電測與儀表(2015年5期)2015-04-09 11:30:52
